
基于S曲线加减速控制的列车运行速度控制研究
2024-12-06 00:00:00袁含雨
中国新技术新产品 2024年12期


摘 要:针对目前轨道交通乘客日益增长的舒适性需求,本文旨在探讨基于S曲线加减速控制方法的轨道交通列车运行速度控制。该方法已应用于全自动运下列车运行速度控制中。经过试验验证,该方法能够使列车在加减速过程中平稳运行,并满足速度要求。研究结果表明,基于S曲线加减速控制方法的轨道交通列车运行速度控制效果良好。
关键词:S曲线加减速控制方法;轨道交通列车;运行速度控制
中图分类号:U 28" " " " 文献标志码:A
随着城市化进程不断推进,作为一种高效、环保的交通方式,轨道交通得到了广泛应用和发展[1]。在轨道交通系统中,列车的运行速度控制是保障运行安全和乘坐舒适的关键要素之一[2]。因此,研究列车运行速度控制方法对提高轨道交通系统的运行效率和乘坐体验具有重要意义。
1 S曲线加减速控制方法
1.1 S曲线加减速控制方法
S曲线加减速控制方法是一种用于控制运动系统加速和减速过程的技术。S曲线加减速控制方法的基本思想是在起始点和目标点间分别进行加速和减速过程,加速和减速的过程通过“S”形曲线进行平滑连接[3]。
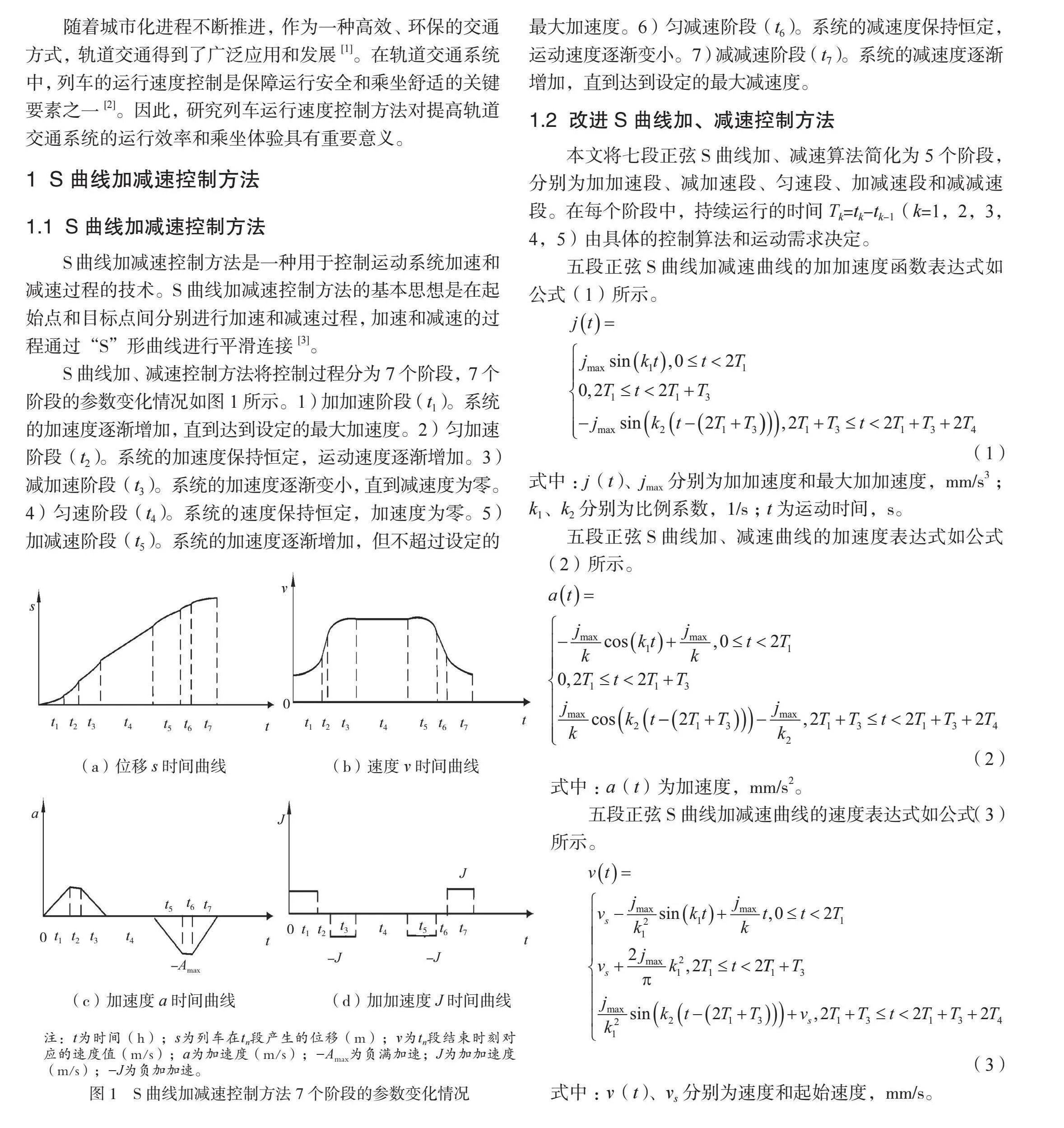
S曲线加、减速控制方法将控制过程分为7个阶段,7个阶段的参数变化情况如图1所示。1)加加速阶段(t1)。系统的加速度逐渐增加,直到达到设定的最大加速度。2)匀加速阶段(t2)。系统的加速度保持恒定,运动速度逐渐增加。3)减加速阶段(t3)。系统的加速度逐渐变小,直到减速度为零。4)匀速阶段(t4)。系统的速度保持恒定,加速度为零。5)加减速阶段(t5)。系统的加速度逐渐增加,但不超过设定的最大加速度。6)匀减速阶段(t6)。系统的减速度保持恒定,运动速度逐渐变小。7)减减速阶段(t7)。系统的减速度逐渐增加,直到达到设定的最大减速度。
1.2 改进S曲线加、减速控制方法
本文将七段正弦S曲线加、减速算法简化为5个阶段,分别为加加速段、减加速段、匀速段、加减速段和减减速段。在每个阶段中,持续运行的时间Tk=tk-tk-1(k=1,2,3,4,5)由具体的控制算法和运动需求决定。
五段正弦S曲线加减速曲线的加加速度函数表达式如公式(1)所示。
(1)
式中:j(t)、jmax分别为加加速度和最大加加速度,mm/s3;k1、k2分别为比例系数,1/s;t为运动时间,s。
五段正弦S曲线加、减速曲线的加速度表达式如公式(2)所示。
(2)
式中:a(t)为加速度,mm/s2。
五段正弦S曲线加减速曲线的速度表达式如公式(3)所示。
(3)
式中:v(t)、vs分别为速度和起始速度,mm/s。
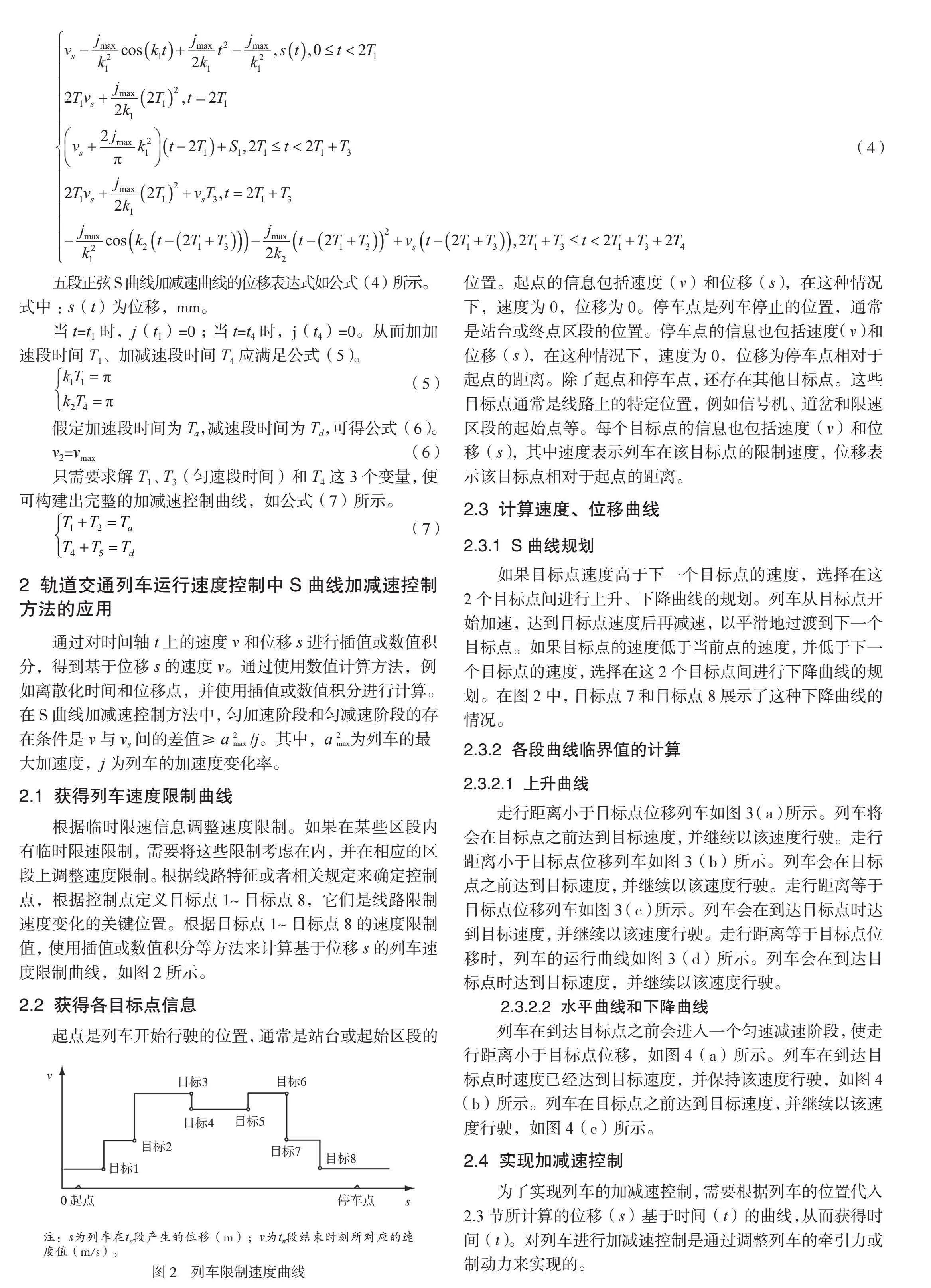
五段正弦S曲线加减速曲线的位移表达式如公式(4)所示。
式中:s(t)为位移,mm。
当t=t1时,j(t1)=0;当t=t4时,j(t4)=0。从而加加速段时间T1、加减速段时间T4应满足公式(5)。
(5)
假定加速段时间为Ta,减速段时间为Td,可得公式(6)。
v2=vmax (6)
只需要求解T1、T3(匀速段时间)和T4这3个变量,便可构建出完整的加减速控制曲线,如公式(7)所示。
(7)
2 轨道交通列车运行速度控制中S曲线加减速控制方法的应用
通过对时间轴t上的速度v和位移s进行插值或数值积分,得到基于位移s的速度v。通过使用数值计算方法,例如离散化时间和位移点,并使用插值或数值积分进行计算。在S曲线加减速控制方法中,匀加速阶段和匀减速阶段的存在条件是v与vs间的差值≥a2 max/j。其中,a2 max为列车的最大加速度,j为列车的加速度变化率。
2.1 获得列车速度限制曲线
根据临时限速信息调整速度限制。如果在某些区段内有临时限速限制,需要将这些限制考虑在内,并在相应的区段上调整速度限制。根据线路特征或者相关规定来确定控制点,根据控制点定义目标点1~目标点8,它们是线路限制速度变化的关键位置。根据目标点1~目标点8的速度限制值,使用插值或数值积分等方法来计算基于位移s的列车速度限制曲线,如图2所示。
2.2 获得各目标点信息
起点是列车开始行驶的位置,通常是站台或起始区段的位置。起点的信息包括速度(v)和位移(s),在这种情况下,速度为0,位移为0。停车点是列车停止的位置,通常是站台或终点区段的位置。停车点的信息也包括速度(v)和位移(s),在这种情况下,速度为0,位移为停车点相对于起点的距离。除了起点和停车点,还存在其他目标点。这些目标点通常是线路上的特定位置,例如信号机、道岔和限速区段的起始点等。每个目标点的信息也包括速度(v)和位移(s),其中速度表示列车在该目标点的限制速度,位移表示该目标点相对于起点的距离。
2.3 计算速度、位移曲线
2.3.1 S曲线规划
如果目标点速度高于下一个目标点的速度,选择在这2个目标点间进行上升、下降曲线的规划。列车从目标点开始加速,达到目标点速度后再减速,以平滑地过渡到下一个目标点。如果目标点的速度低于当前点的速度,并低于下一个目标点的速度,选择在这2个目标点间进行下降曲线的规划。在图2中,目标点7和目标点8展示了这种下降曲线的情况。
2.3.2 各段曲线临界值的计算
2.3.2.1 上升曲线
走行距离小于目标点位移列车如图3(a)所示。列车将会在目标点之前达到目标速度,并继续以该速度行驶。走行距离小于目标点位移列车如图3(b)所示。列车会在目标点之前达到目标速度,并继续以该速度行驶。走行距离等于目标点位移列车如图3(c)所示。列车会在到达目标点时达到目标速度,并继续以该速度行驶。走行距离等于目标点位移时,列车的运行曲线如图3(d)所示。列车会在到达目标点时达到目标速度,并继续以该速度行驶。
2.3.2.2 水平曲线和下降曲线
列车在到达目标点之前会进入一个匀速减速阶段,使走行距离小于目标点位移,如图4(a)所示。列车在到达目标点时速度已经达到目标速度,并保持该速度行驶,如图4(b)所示。列车在目标点之前达到目标速度,并继续以该速度行驶,如图4(c)所示。
2.4 实现加减速控制
为了实现列车的加减速控制,需要根据列车的位置代入2.3节所计算的位移(s)基于时间(t)的曲线,从而获得时间(t)。对列车进行加减速控制是通过调整列车的牵引力或制动力来实现的。
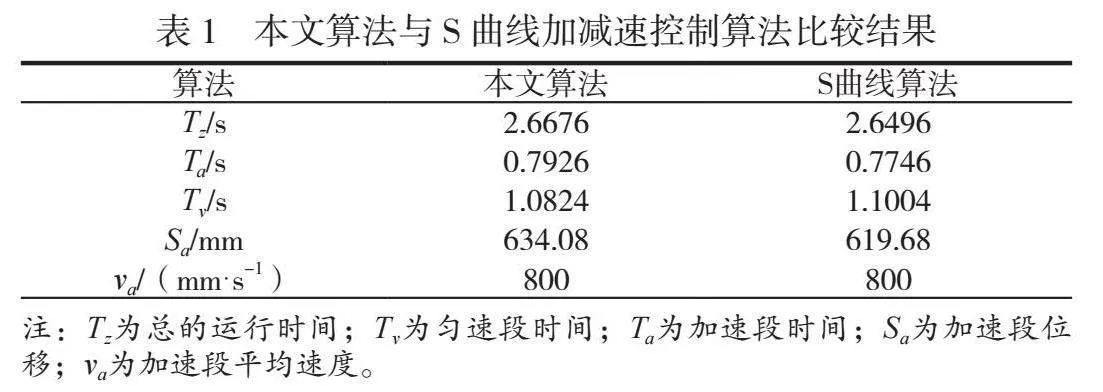
3 算法比较
本文算法和常用的S曲线算法的比较结果包括运动过程中的加速度、速度和位移曲线的形状/特点3个方面。起始速度vs和结束速度ve均为0,最大加速度Amax和最大减速度Dmax均为4500mm/s²,最大加加速度jmax为1.6×104mm/s³,最大速度vmax为600mm/s,运动距离L为3000mm。比较2种算法在给定参数下得到的加速度、速度和位移曲线的变化情况,并分析其曲线特点和变化规律,见表1。
本文算法在总的运行时间、加速段时间、匀速段时间、加速段位移和加速段平均速度方面均有优秀表现。
4 结语
本文研究了基于S曲线加减速控制方法的轨道交通列车运行速度控制,该方法能使列车在加减速过程中平稳运行,并满足速度要求。但本文也存在一些可以改进的方面。例如,试验数据的采集和处理需要更精确、全面,以提高研究结果的可靠性。此外,还可以进一步研究和优化S曲线加减速控制方法的参数和策略,以进一步提高列车运行的安全性和乘坐舒适度。
参考文献
[1]姚慧欣.考虑城市轨道交通通行限制的列车运行速度自动控制方法[J].自动化与仪器仪表,2023(1):106-110.
[2]赵琪.轨道交通全自动运行线路行车组织方法探讨[J].中国科技期刊数据库 工业A,2023(11):166-168.
[3]周亮.缓和曲线段地铁运行引起地表振动的实测结果及其传播规律分析[J].城市轨道交通研究,2017(9):58-63.
[4]宋远志,许宁,陆凤祥,等.柔性S曲线加减速控制算法研究[J].盐城工学院学报(自然科学版),2022,35(3):48-54.
