
基于麻雀算法的大载膜量覆膜装置控制研究与设计
2024-12-05 00:00:00黄磊邱昌明张宇肖迪
武汉纺织大学学报 2024年6期





摘要:针对水稻种植覆膜机作业过程中出现的地膜过度拉伸、断裂及载膜量较小,需多次人工换膜等问题,研制一种与水稻种植机可匹配使用的电动同步覆膜装置,可增大覆膜装置载膜量,并采用基于麻雀搜索算法的控制方法,对PID控制器进行参数优化,实现同步覆膜过程的精准速度控制。仿真结果表明:电动覆膜装置对地膜料卷的承载重量增大至60kg,且与传统PID控制方法相比,SSA-PID控制器的总响应速度提高了0.134s,超调量减少了21.5%,具有更好的控制效果。
关键词:水稻种植覆膜机;覆膜装置;PID;麻雀优化算法
中图分类号:TP273文献标志码:A文章编号:2095-414X(2024)06-0052-06
0引言
水稻覆膜种植具有增产、节水、控制杂草、降低虫害等优点,目前水稻覆膜种植多采用机械化作业[1-3]。水稻种植覆膜机是用于水稻田覆膜、插秧的农用机械,其通过覆膜和插秧装置之间的配合可以同时完成覆膜和插秧的种植流程[4]。近年来,水稻种植覆膜机广泛用于大规模水稻种植领域,极大地提高了水稻种植覆膜效率[5]。
在水稻种植覆膜机领域,众多研究者对覆膜机构、插播机运动轨迹、压膜机构等方面进行了研究[6]。吴家安等[7]研制了的一种覆膜机构,有效解决了地膜展平程度差、封边效果不佳等问题,提高了水稻覆膜质量与效果。张福学等[8]针对覆膜作业不灵活的难题,设计出2DMF-1型自走式地膜机,该新型地膜机具有自动化程度高、适应性强等优点,可用于多种地形。Hua Li等[9]等提出了一种伸缩杆法直播机构与薄膜覆盖相结合的方式,通过离散元建模模拟,开发了一种用于薄膜覆盖播种的精密直播机,并分析了直播轨迹中的多种影响因素。高占文[10]等设计了一种水稻种膜覆膜直播机,解决了机械排种对水稻种粒的机械损伤问题,并测定了地膜拉伸率为7%。韩休海[11]等分析水田环境对地膜的影响,给高速插秧机增加覆膜装置,实现了插秧覆膜一体化作业,为增产高效提供了有利条件。在上述文献中,水稻种植地膜机都是依靠覆膜机向前推进时,泥土对地膜产生的拉力来实现地膜铺设,故载膜量不可过大,否则极易导致地膜过度拉伸或断裂,甚至产生无法正常带动地膜料卷旋转完成铺设地膜工作的情况,严重影响覆膜工作的进行。在实际作业中,无动力覆膜装置的载膜量仅为20kg,这导致地膜铺设过程中需要多次重新装载膜料,这样不仅增大了劳动强度,还降低了工作效率[12]。因此,为增大水稻种植覆膜机的地膜载膜量,并且进一步提高覆膜质量,急需提高覆膜装备的电气化水平[13]。
针对以上问题,考虑地膜搭载和铺设的特点,提出了采用步进电机驱动载膜轴,搭配控制算法实现同步覆膜的方式,有效解决上述难题。但近年来鲜有关于电动覆膜设备和同步覆膜控制方面的研究。
PID是一种常见的闭环控制方法,其广泛应用于工业自动化控制系统,以及温度、压力、速度等各类控制场合[14-15],其可以应用于电动覆膜装置的速度调控。然而,在同步覆膜控制系统中,传统PID算法可能无法满足精确调节速度的要求,故提出采用麻雀搜索算法优化PID的方式来实现地膜铺设中的速度控制[16]。麻雀搜索算法广泛应用于多种领域,但根据现有文献,其尚未应用于水稻种植覆膜机领域[17]。本文构建了电动同步覆膜装置的模型,对其关键部件进行了仿真,验证了部件的承载能力。并且,为精准控制电动覆膜装置,设计了SSA-PID控制器,利用SSA对PID控制器的参数进行优化,仿真验证SSA-PID控制器的控制性能,为今后覆膜同步控制技术发展提供了思路。
1结构组成及原理
1.1总体结构及工作流程
水稻种植覆膜机的主要结构如图1所示,由机体、水稻覆膜装置、插秧装置、测速装置等构成。
水稻种植覆膜机作业时,机体作为移动载具,承载连接覆膜装置和插秧装置,负载它们移动。插秧装置连接在机体后方,可上下移动,作业时向下移动到特定位置,开始插秧作业,待机时向上移动到非作业位置,保护插秧装置,使其不与地面发生磕碰。秧箱在插秧装置上方,插秧装置可从秧箱上,分取一定数量的秧苗插入铺设好地膜的土地上。电动覆膜装置连接在插秧装置与机体之间,搭载一定重量的地膜料卷,配有测速装置检测机体移动速度和地膜铺放速度,覆膜装置负责将地膜料卷均匀地布放,并平整的铺放地膜到土地上,压膜轮和推土板配合作业,将地膜两侧压实,使地膜固定在地面上。
1.2电动同步覆膜装置结构组成
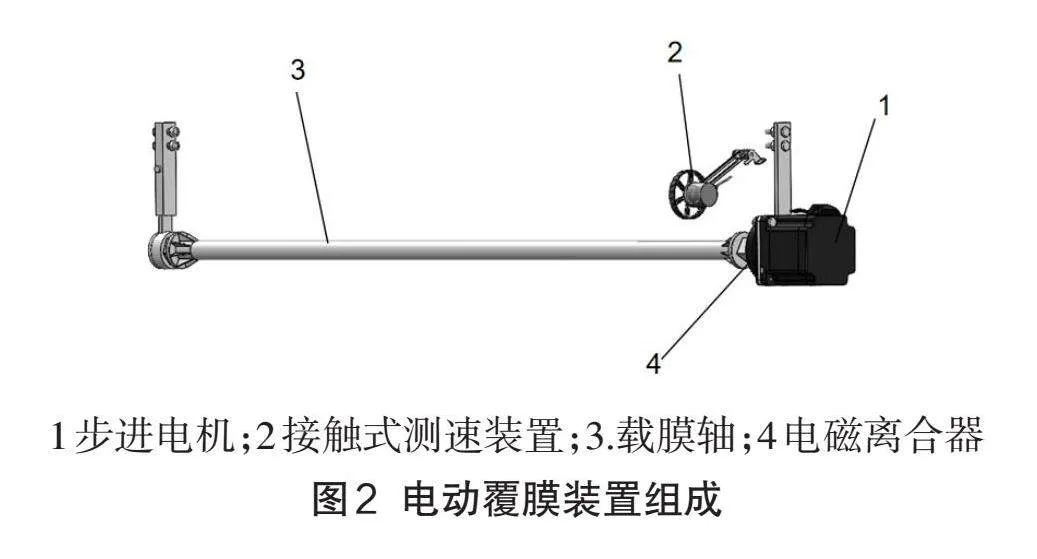
电动同步覆膜装置包括覆膜和速度检测两部分,覆膜部分由步进电机、电磁离合器、载膜轴等组成,如图2所示。速度检测部分由弹力臂、接触轮等组成,如图3所示。整个覆膜装置使用支架和螺栓安装在机体上,步进电机与载膜轴相连接,带动载膜轴旋转,载膜轴搭载固定地膜料卷并带动其旋转,接触式测速装置的接触测速轮搭放在地膜料卷上,对地膜料卷的速度进行检测。
1.3同步覆膜原理
如图4所示,水稻种植覆膜机在田间作业时,接触式测速装置会实时检测地膜料卷2的实际速度V2,控制器将料卷速度V2与机体1的移动速度V1进行比较分析,计算出速度差值,经PID控制器处理后输出信号,调节脉冲频率控制步进电机达到调节转速的目的。电机接收脉冲信号输出特定转矩带动地膜料卷旋转布放,同时接触式测速装置实时将地膜料卷速度反馈给控制器,实现闭环控制。当料卷达到规定转速或重量时,电磁离合器分离,实现动力中断,此时料卷在拉力下就可完成铺设。
2覆膜装置承载性能仿真
2.1材料选择和网格划分
传统无动力覆膜装置在田间覆膜的作业中,首先把地膜一端固定在泥土里,再驱动水稻种植覆膜机前进,泥土与机体之间相对位移产生的拉力带动地膜料卷旋转,进行地膜铺设[18]。这样的覆膜方式下的地膜料卷仅有20kg,铺设地膜过程中,需多次重新人工装膜。并且仅靠拉力铺设地膜,易导致地膜过度拉伸甚至断裂,无法带动料卷旋转铺设。电动覆膜装置采用步进电机驱动地膜料卷旋转,这种设计可以带动更重的料卷旋转布放。在本节中,对电动覆膜装置的载膜轴进行搭载60kg地膜料卷仿真,验证其承载性能。
将载膜轴模型导入ANSYS中进行静力学分析,选择45号钢作为载膜轴的材料,其具有较高的强度和良好的韧性,成本较低,是载膜轴的理想选择材料,材料属性如表1所示。
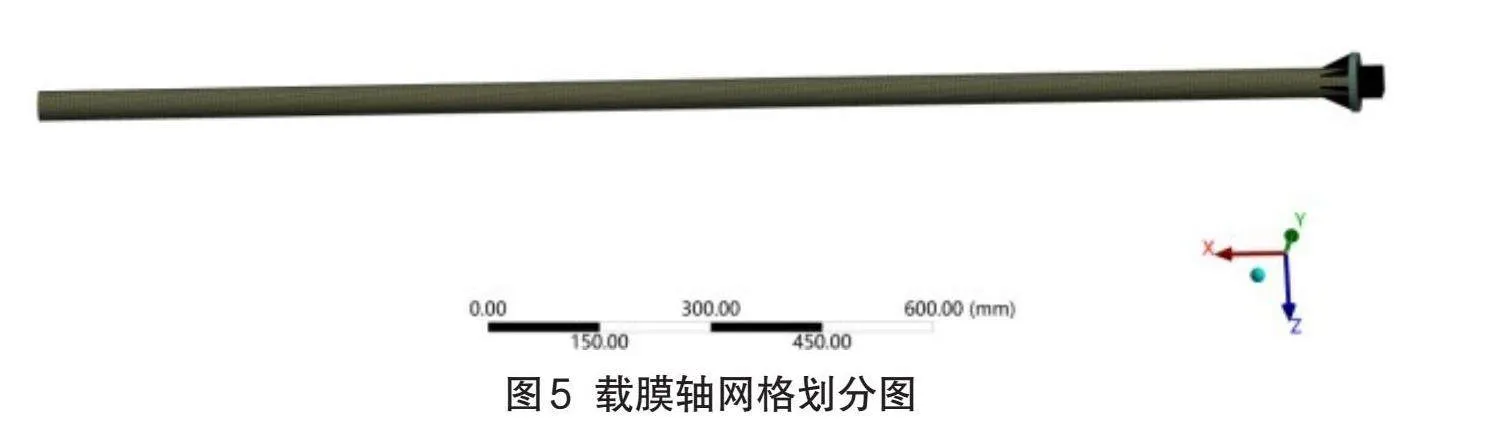
载膜轴的网格划分如图5所示。根据载膜轴的形状特点,在不同位置采取不同网格划分方法和尺寸,以此来提升网格质量。在形状规则的部位采用扫掠,网格尺寸为1mm,不规则处采用六面体网格,网格尺寸为0.5mm。通过这种划分方法,得到了高质量的网格,节点总数为2 959 205,单元总数为1 722 430,为后续力学性能分析打下了基础。
载膜轴的两端分别与步进电机和移动支架相连接,故在一端采用远程位移约束,另一端采用固定支撑约束;在载膜轴搭载地膜料卷位置施加一个大小为600N,作用力方向向下的力,以此表示搭载60kg的地膜。载膜轴悬挂安装在插秧装置下方,还受自身重力影响,故在载膜轴上施加一个地球重力。
2.2仿真结果分析
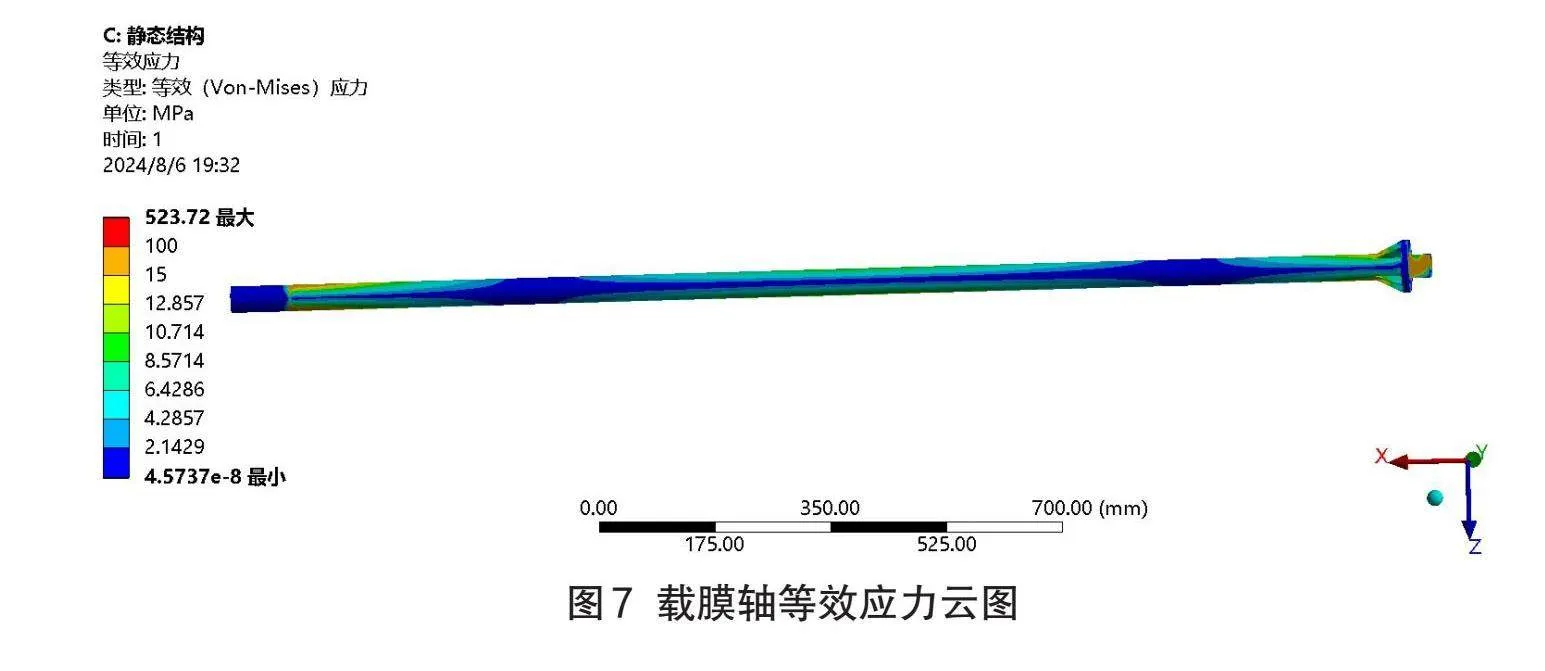
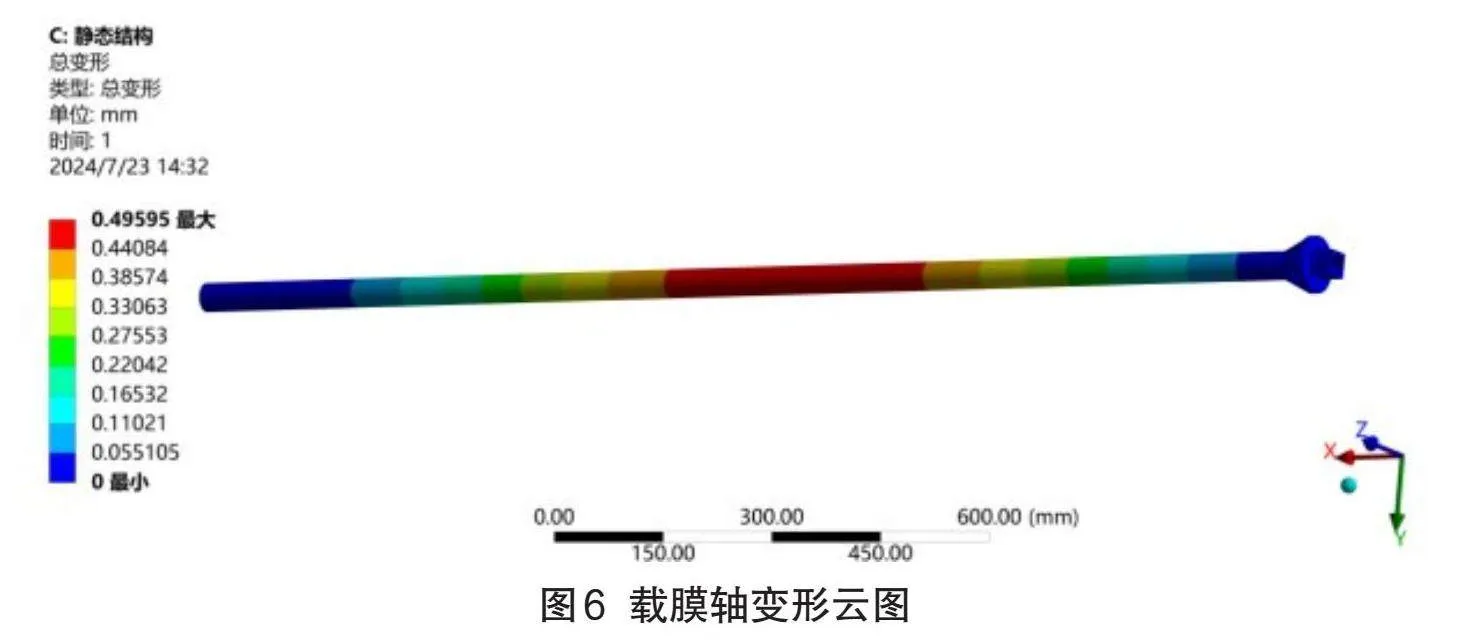
由图6总变形云图可以观察到,载膜轴在承受负载时的最大变形量达到了0.49mm,这种变形主要集中在载膜轴的搭载料卷位置。这表明在实际负载下,载膜轴搭载料卷区域的受力较为集中,从而导致形变。由图7等效应力云图可以看出,载膜轴在承受负载时产生的最大应力为523.72Mpa,明显低于材料的屈服强度,处于材料可承受范围,不会因为应力过大而导致载膜轴发生塑性变形或者损坏。仿真结果验证载膜轴满足大载膜量的设计需求,可承载60Kg的地膜料卷,较传统无动力覆膜装置的载膜量大大增加。
3电动同步覆膜控制方式
3.1控制方法
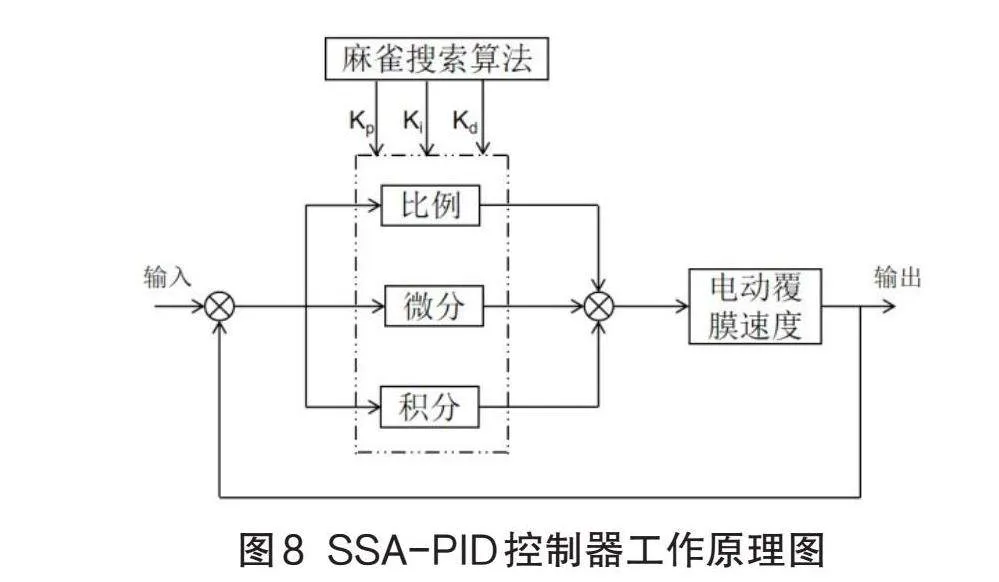
电动同步覆膜控制采用PID控制算法,以实现对地膜料卷铺设速度的精确控制。该算法通过实时检测机体和地膜料卷之间的速度差值,将这一差值经过比例、积分和微分计算后输出相应的控制量[19]。这个控制量被用来对步进电机进行调节转速,控制地膜料卷布放速度与机体行进速度一致,保护地膜不被过度拉伸甚至断裂。然而,在实际应用中,一般的PID控制器往往难以满足电动同步覆膜速度高精度控制的要求,因此为了解决这一问题,引入麻雀搜索算法(Sparrow Search Algorithm,SSA)来优化PID控制的参数,以此来提高覆膜速度控制精度[20]。SSA-PID控制器工作原理如图8所示。
3.2麻雀搜索算法介绍
麻雀搜索算法是一种模拟麻雀觅食、躲避捕食者行为的群体智能优化算法[21]。在麻雀搜索算法中,包含发现者和加入者,发现者的职责是搜索食物位置,加入者负责跟随发现者并获取食物信息,它们相互协同合作进行优化求解过程[22-23]。
在算法中,发现者的位置变换公式(1)为[24]:
Xα(i)1=íïî(ìï)X(X),,()β(β)
上式中:Xα,β表示在搜索空间中第α只麻雀在第β维的位置信息;i是迭代次数;Z为算法预设的最大迭代次数;J和K分别表示麻雀优化算法中的预警值和安全值,它们的取值范围分别为(0,1]和(0.5,1];∂∈(0,1]是一个随机数;当Jlt;K时,表示发现者所处位置较为安全,可以扩大搜索的范围,当J≥K时,表示发现者周围出现了危险,此时麻雀去其他安全区域继续搜索;C是一个服从正态分布的随机数;H为一个大小为1×d的矩阵,其中d为种群大小,矩阵的所有元素均为1。
在算法中,加入者的位置更新公式(2)为[25]:
Xα(i)1=íC exp,αgt;(2)
Xα(i)1+|Xα(i),β-Xα(i)1|A+H,a≤
上式中:Xp是麻雀的位置信息,表示当前适应度值最高的发现者所占据的位置;Xworst则是表示当前适应度值最低的发现者所占据的位置;A是一个元素被随机赋值为1或-1的1×d矩阵,且满足A+=AT(AAT)-1。当αgt;n/2时(n表示麻雀总数),表明第α个加入者当前的位置较为不利,缺乏好的食物来源,因此迫切转移到其他食物来源更好的区域。
在寻找食物的过程中,一些麻雀能够感知到危险的存在,它们的位置变换公式(3)为[26]:
Xα(i)1=íïïî(ìïï)X(X)β(st)-,β|,f(f)a(g)=fb(3)
上式中:Xbest表示当前的最优全局位置,即当前适应度值最高的位置;步长控制参数ξ是一个服从均值为0和方差为1的正态分布随机数。G是一个-1到1之间的随机数值,其既表示麻雀的移动方向,也作为调节移动距离的参数;fi是第i个麻雀所在位置的适应度值。最佳适应度值fg和最差适应度值fw对应当前发现的最佳位置和最差位置。为了防止计算中分母为0的错误,所以引入一个极小的常数γ。当fαgt;fg时,表明麻雀位于群体的边缘,更容易遭遇危险;而当fα=fg时,麻雀感知到了附近的危险,于是需要向其他同伴靠拢,以降低被捕食的风险。
SSA优化PID算法的步骤如下所示:
步骤1:初始化参数设置,设置种群数量、最高迭代次数、发现者比例、警戒者比例、界限、维度等参数。
步骤2:求解各个体适应度值,同时记录当前最优适应度值和最差适应度值,以及其个体在参数空间中的位置;
步骤3:比较适应度值选择适应度值较高的个体,将这些个体作为发现者,其位置更新根据式(1)进行,然后在局部进行搜索;其余个体作为跟随者,根据式(2)来更新位置信息,在全局进行搜索。
步骤4:依照预警值从种群中选取一部分个体作为警戒者,这些个体的任务是进行更广泛的搜索,以防算法过早收敛得到次优解,这些警戒者的位置将根据式(3)进行更新。
步骤5:每次迭代都将当前的最优解与之前保存的最优解进行比较。如果当前解更优,则更新当前解为最优解,反之,保留之前最优解,不进行更新。
步骤6:个体的位置是对应适应度值的,根据最优适应度值的更新情况,判断是否更新个体的位置信息。
步骤7:判断当前迭代次数是否达到了预先设定的最大迭代次数,如果达到最大迭代次数,则结束迭代,继续执行算法下一步,否则重复步骤2。
步骤8:当算法结束时,输出最终优化求解得出的PID控制器三个参数(Kp、Ki、Kd)。
4仿真验证与结果分析
4.1覆膜装置控制算法仿真
在进行覆膜装置控制算法仿真前,首先预设参数,将SSA算法的种群规模设为n=50,这表明每次有50只“麻雀”参与寻找最优解。设置最大迭代次数为50,以保证算法有充足的时间寻找最优解。设置发现者比例为0.7,其余为加入者,警戒者比例为0.2,下边界为0.1,上边界为30,保证最优解在合理的范围内。设定维度为3,即PID控制器的三个参数。同步覆膜装置是使用步进电机控制角位移精准旋转,进而调节速度使地膜料卷精准铺设,所以电机是整个控制系统的被控对象。为模拟实际情况,仿真是采用传递函数代替实际电机,传递函数为:
G(s) =s2+0.0(8)24s(6.2)86.24(4)
4.2 PID参数优化
采用MATLAB软件作为实验平台,使用麻雀搜索算法对PID控制器的三个关键参数Kp、Ki、Kd进行了优化处理,SSA算法在多次迭代过程中寻求到这三个参数的最优解。如图9所示为最优适应度曲线变化趋势,通过观察曲线可以发现,随着迭代次数的不断增加,最优适应度的值逐渐减小并趋于稳定,其在第7次迭代时达到了最小值,这证明出SSA算法在寻找最优解方面的出色性能,其具有较强的寻优速度和收敛性能。通过SSA对PID参数的迭代优化,我们最终得到了PID控制器三个参数的最优解,即Kp=28.6299,Ki=24.8999,Kd=0.94276。
4.3仿真结果对比
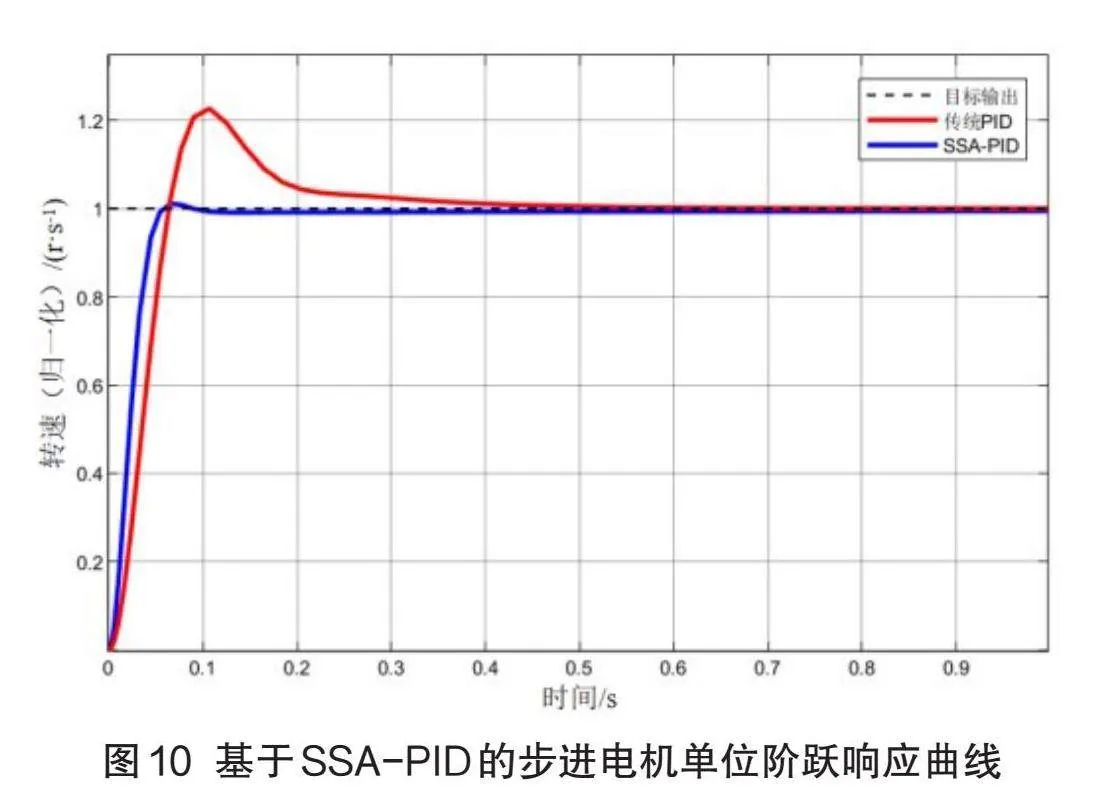
运用SIMULIINK仿真工具对覆膜装置控制算法进行仿真分析,对比SSA-PID算法与传统PID算法在控制系统调节性能上的差异。将SSA算法寻找到的最优PID参数与传统PID参数代入仿真模型中。同时,为模拟实际工作时的突变信号,设定归一化转速作为阶跃信号输入。两种控制方法的响应曲线如图10所示。图10中的响应曲线显示出,SSA-PID的曲线呈现更快的上升趋势,且超出目标输出的幅度较小,其更快的稳定于目标输出值。这一现象表明相较于传统PID控制器,SSA-PID的响应速度更具优势,且调节速度变化更加稳定,具有更优的控制效果。而传统PID的超调程度较大,且趋于平稳的调节时间较长,这意味着在实际运用中,传统PID控制器可能需要更长的时间来达到稳定的工作状态。
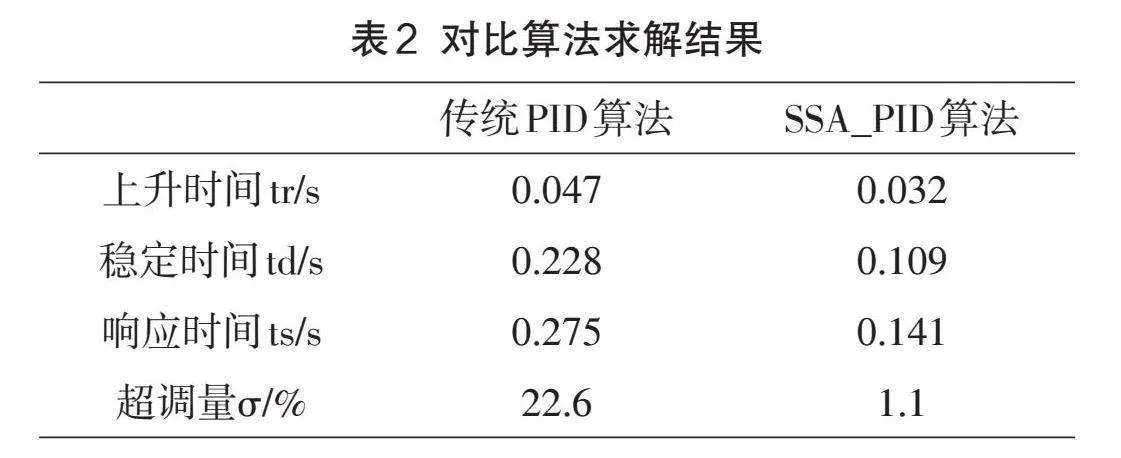
从图10中我们可以提取出SSA-PID与传统PID控制器在各项时域性能指标上的数据,具体数值如表2所示。从表2中可以直观看出,SSA-PID控制器在多个关键性能指标上表现出色。在响应速度方面,SSA-PID控制器优于传统PID控制器,其上升速度较传统PID控制器快了0.015秒,稳定时间缩短了0.109秒,这使得SSA-PID控制器的总响应速度快了0.134秒。这表明系统能够更快的达到稳定状态,确保了覆膜装置的覆膜同步性能。并且,SSA-PID控制器在超调量上也展示了显著优势,其超调量仅为1.1%,相较传统PID控制器减少了21.5%,超调量的显著减小表示SSA-PID控制器在控制系统中的波动更小,其产生更小的误差,能够能加精确地稳定在设定值上,这一对比结果进一步证明了SSA-PID控制性能的稳定性和优越性,增强了系统在面对复杂环境时的稳定性,为实际覆膜过程提供了更可靠的保障。
5结论
1)针对目前水稻种植覆膜机载膜量较小、覆膜质量差的问题,研制了一种电动同步覆膜装置,将无动力覆膜装置改进为步进电机驱动的电动覆膜装置,将载膜量从常规的20kg增加到60kg,大大减少了水稻种植覆膜机田间作业时的装膜次数,提高了种植效率。
2)采用SSA-PID的控制方法来控制电动覆膜装置,使用麻雀搜索算法优化PID的参数,再与传统PID进行对比。使用MATLAB进行仿真,观察两种方法的图像表明,经过SSA算法优化后的PID控制器,其响应速度更加迅速,超调量更小,这说明SSA算法在寻找最优解方面,相比于传统PID更为高效,传统PID往往需要用繁琐费时的手动调节方法。SSA-PID控制方法在电动同步覆膜装置控制系统中具有更好的控制效果。
3)后续研究将进一步对电动装置的结构进行优化设计,以提高其在水田环境中的工作可靠性和与不同机型的水稻种植机的适配性。并且在优化结构设计的基础上,对控制算法改进,提高算法的收敛速度和搜索精度,以此来提高覆膜同步率。
参考文献:
[1]沈菁,张莉,赵洪阳,等.浙江省新垦耕地土壤培肥和覆膜节水栽培对土壤肥力和水稻产量的影响[J].中国稻米,2024,30(4):81-85.
[2]王玉,何文清,靳拓,等.基于生命周期评价的东北地区覆膜水稻环境影响分析[J].农业资源与环境学报,2024,41(4):918-925.
[3]温浩军,陈学庚,陈浩,等.农田地膜回收机械应用现状与发展[J].农业环境科学学报,2024,43(6):1271-1277.
[4]邢占强,方永辉,韩休海.水稻机械覆膜插秧技术及装备的研究[J].农机化研究,2023,45(1):264-268.
[5]赵娜.寒地有机水稻覆膜(降解膜)机插技术产量和效益分析[J].现代农业,2020,(11):28-29.
[6]邢占强,方永辉,韩休海.水稻机械覆膜插秧技术及装备的研究[J].农机化研究,2023,45(1):264-268.
[7]吴家安,常传义,高明宇,等.基于久保田高速插秧机覆膜装置的设计与试验[J].农机化研究,2023,45(11):75-81.
[8]张福学,李建新.2DMF-1型自走式地膜机的研制[J].农机使用与维修,2020(2):7-9.
[9]Li,H.;Zeng,S.;Luo,et al.Design,DEM Simulation,and Field Experiments of a Novel Precision Seeder for Dry Di⁃rect-Seeded Rice with Film Mulching[J].Agriculture 2021,11:378.
[10]高占文,张旭,金青子.水稻种膜覆膜直播机的设计与试验[J].农机化研究,2024,46(10):97-101.
[11]韩休海,邢占强,于磊,等.水稻机械覆膜插秧试验研究[J].农机化研究,2020,42(12):176-179.
[12]王亨泰,孙伟,张华,等.机械化膜上种植技术发展概况[J].农业装备与车辆工程,2022,60(12):7-11.
[13]王诚鹏,王文蔚.农机电动化是新的增长点[J].储能科学与技术,2023,12(8):2705-2706.
[14]程前,李赫然,聂卓赟,等.基于微分平坦的旋转倒立摆双闭环抗扰PID控制[J].仪器仪表学报,2023,43(9):284-291.
[15]彭云龙,康元磊,于逸尘,等.基于精准停车及节能优化的列车速度跟随控制[J].城市轨道交通研究,2024,27(6):215-220.
[16]张稚荷,周凯红,朱梦岩.基于改进SSA优化PID的下肢康复机器人控制[J].现代电子技术,2024,47(13):153-159.
[17]ZHANG J,ZHU X,LI J.Intelligent Path Planning With an Improved Sparrow Search Algorithm for Workshop UAV Inspection[J].Sensors.2024,24(4):1104.
[18]常传义,吴家安,高明宇,等.有机水稻覆膜栽培技术与机具研究进展[J].江苏农业科学,2022,50(22):46-55.
[19]余文浩,齐立哲,梁瀚文,等.基于深度强化学习的分层自适应PID控制算法[J].计算机系统应用,2024:1-9
[20]LIU Y,SHI Z,FU B,et al.Radar Error Correction Method Based on Improved Sparrow Search Algorithm[J].Applied Sciences.2024,14(9):3714.
[21]YUE Y,CAO L,LU D,et al.Review and Empirical Analy⁃sis of Sparrow Search Algorithm[J].Artif Intell Rev 2023,56(10),10867-10919.
[22]GHAREHCHOPOGH FS,NAMAZI M,EBRAHIMI L,et al.Advances in Sparrow Search Algorithm:A Comprehen⁃sive Survey[J].Archives of Computational Me-thods in En⁃gineering.2023,30(1):427-55.
[23]XUE J,SHEN B.A Novel Swarm Intelligence Optimiza⁃tion Approach:Sparrow Search Algorithm[J].Systems Sci⁃enceamp;Control Engineering.2020,8(1):22-34.
[24]牟远明,卓然,高飞.基于混合改进麻雀搜索算法的农用移动机器人路径规划[J].中国农机化学报,2024,45(9):234-243.
[25]王振东,王建兰,王俊岭,等.融合多策略学习型麻雀搜索算法的UWSN覆盖优化[J].传感技术学报,2024,37(8):1424-1433.
[26]王尔申,王欢,雷虹,等.基于麻雀搜索算法的ARAIM故障子集优化算法[J].北京航空航天大学学报,2024,50(7):2066-2073.
Research and Design of Control of Large Load Modulus Laminating Device Based on Sparrow Algorithm
HUANG Lei1,QIU Changming1,ZHANG Yu1,XIAO Di2
(1.School of Mechanical and Electrical Engineering,Anhui Jianzhu University,Hefei Anhui 230601,China;2.CNOOC Environmental Services(Tianjin)Co.,Ltd.,Tianjin 300450,China)
Abstract:In order to solve the problems of overstretching,breakage and small film carrying capacity and the need for manual film replace-ment in the operation process of rice planting mulching machine,an electric synchronous mulching device that can be matched with rice planting machine was developed to increase the film carrying capacity,and the PID control method based on the optimization parameters of the sparrow search algorithm was adopted to realize the accurate control of the mulching process by using the PID control after parameter optimization.The simulation results show that the bearing weight of the plastic film roll of the electric mulching device is increased to 60kg,and compared with the traditional PID control method,the response speed of the SSA-PID controller is increased by 0.134s,and the over-shoot amount is reduced by 21.5%,which has a better control effect.
Keywords:rice planting mulching machine;laminating device;PID;sparrow optimization algorithm
(责任编辑:李强)
