
输电线四轮移动作业机器人机械系统设计与作业空间分析
2024-12-05 00:00:00于俊康江维邹德华李红军陈伟
武汉纺织大学学报 2024年6期





摘要:为了适应多分裂式超高压输电线的作业要求,针对目前单根线路上作业机器人功能单一,越障能力不足,作业范围小的问题。本文提出一种输电线四轮移动作业机器人新构型,其采用四轮移动平台和双机械臂及其末端的结构形式使得机器人兼具越障和作业双重功能,其中行走臂的设计使机器人具有较强的越障能力,机械臂搭载末端工具可完成线路上不同作业任务,在结构设计基础上通过INVENTOR软件开发了机器人虚拟样机模型,并对机械臂作业过程进行了建模和运动学分析,最后,在MATLAB环境下采用蒙特卡洛法对机械臂末端进行作业空间仿真,利用机器人工具箱对机械臂在不同工作任务下运动轨迹进行了仿真分析。结果表明,其一,所设计四轮移动机器人通过行走臂上旋转关节和横移关节的互相配合对行走轮进行位姿变换,以跨越防震锤和均压环等线路上障碍物。其二,末端可自重构作业机械臂实现对线路上金具夹持和作业操作,完成防震锤复位和耐张线夹引流版螺栓紧固作业任务。其三,完整的机器人系统具有较强的越障能力和灵活的机械臂作业能力,能够完成整条线路的巡检作业任务。
关键词:分裂式超高压输电线;四轮移动作业机器人;虚拟样机;作业空间仿真;巡检作业
中图分类号:TP273文献标志码:A文章编号:2095-414X(2024)06-0084-09
0引言
高压输电线路的正常运行关乎国家经济的发展[1]。高压输电线路常受到大风、雨雪等恶劣天气条件的影响,线路上的零件易发生松动和老化,要经常对线路进行巡检以保证电网的正常的运行。以往都是通过人工或者直升机对输电线路进行巡检,人工巡检工作效率低,危险性大,而直升机巡检的成本高[2-3]。
本世纪初国内开始对输电线路巡检机器人的研究[4]。如文献[5]研制出一种三臂式输电线路巡检机器人,通过对称模块化的结构设计使机器人具备了越障功能,提高了越障的平稳性和可靠性,由于该方案结构的限制,无法跨越线路上的均压环等较大地障碍物。文献[6]基于仿生原理设计了一种具有开闭结构和移动能力的模块化巡检机器人,模块化设计降低了机器人安装组合的复杂程度,轮指移动机构可使机器人较快的越过线路上障碍物,但该方案缺少对实际作业对象的具体分析,无法完成对线路上检修作业任务。文献[7]设计出一种新型线路巡检机器人,主要通过两组不同的手臂相互配合来跨越线路上的障碍物,并且能够跨越耐张线型杆塔进行作业,越障能力强,越障时需越塔臂上的挂钩挂在线缆上,但在实际作业环境中线缆存在较大的摆幅和震动,会造成挂钩挂线失败影响机器人的平稳性。文献[8]针对高压输电线路上多种作业任务,提出了一种面向多作业任务的模块可重构移动作业机器人,将机器人进行单元模块划分,根据可重构方案使作业机器人能够完成线上多种检修维护作业任务。文献[9]提出一种适用于双分裂输电线路的四轮移动机器人,根据作业环境及作业对象,设计的双作业机械臂可完成线路上旧间隔棒的拆卸和新间隔棒的安装,并对机械臂的作业过程进行了规划。目前,超高压输电线路多采用分裂导线的架空方式,如220千伏和550千伏的输电线路多采用二分裂式和四分裂式架空线路。上述研究的巡检机器人存在工作范围小,功能单一的问题,仅能在单根输电线路上巡检,对于双分裂式导线带电巡检机器人的研究较少[10],而恰恰双分裂和多分裂导线是电能传输的主力,因此,针对分裂导线研究开发相应巡检作业机器人其应用范围更广,实用性更强。
综上所述,本文提出一种可在二分裂式/四分裂式线路上作业的输电线四轮移动机器人,代替人工完成高压线路上的巡检、防震锤的复位和耐张线夹引流板螺栓紧固作业[9]。通过机器人虚拟样机开发及运动学建模,在MATLAB中对末端作业空间进行了仿真,验证机械系统设计的合理性和有效性,该机器人不仅具有良好的越障能力,且一次上线可同时完成电力巡检和维修的任务,提高电力作业效率。
1输电线路四轮移动作业机器人机械系统设计
1.1机械构型与虚拟样机模型
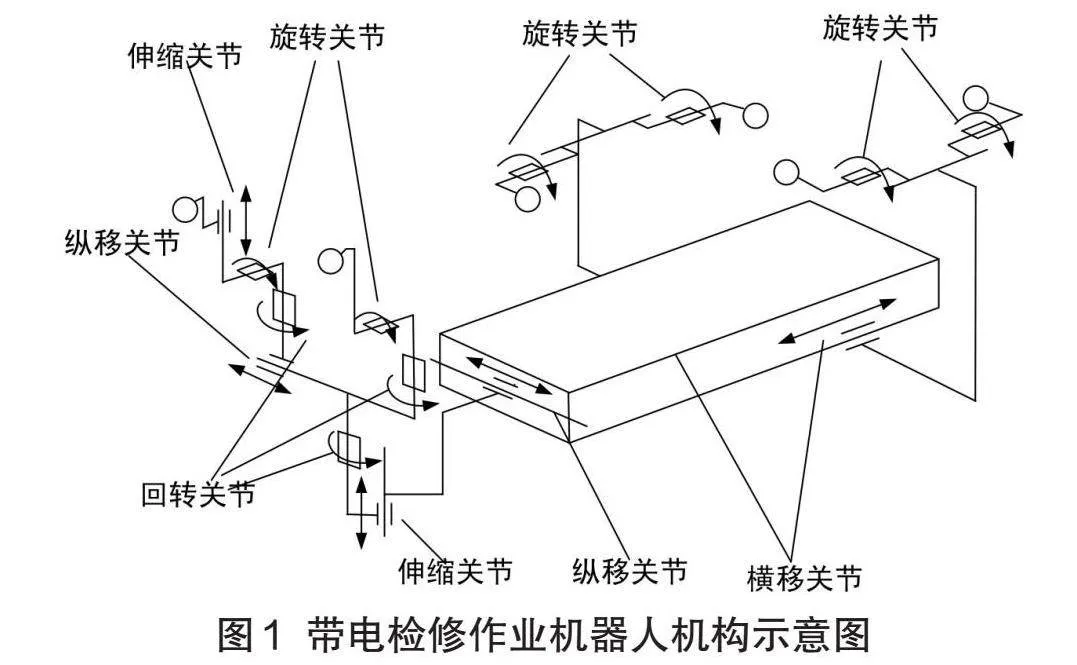
如图1所示,本文的作业机器人由三平台一系统组成,即移动平台、作业平台、上下线平台和硬件测控系统。机器人的运动是通过各关节的运动实现,包括伸缩关机、旋转关节、回转关节、纵移关节、横移关节,伸缩关节沿关节轴伸缩运动,回转关节沿铅垂轴转动,横移关节使行走臂沿导线轴线同步相向移动。机器人通过“移动平台+双作业手+末端工具”组合机构完成金具销更换/补充、防振锤复位、耐张线夹引流板螺栓紧固作业。
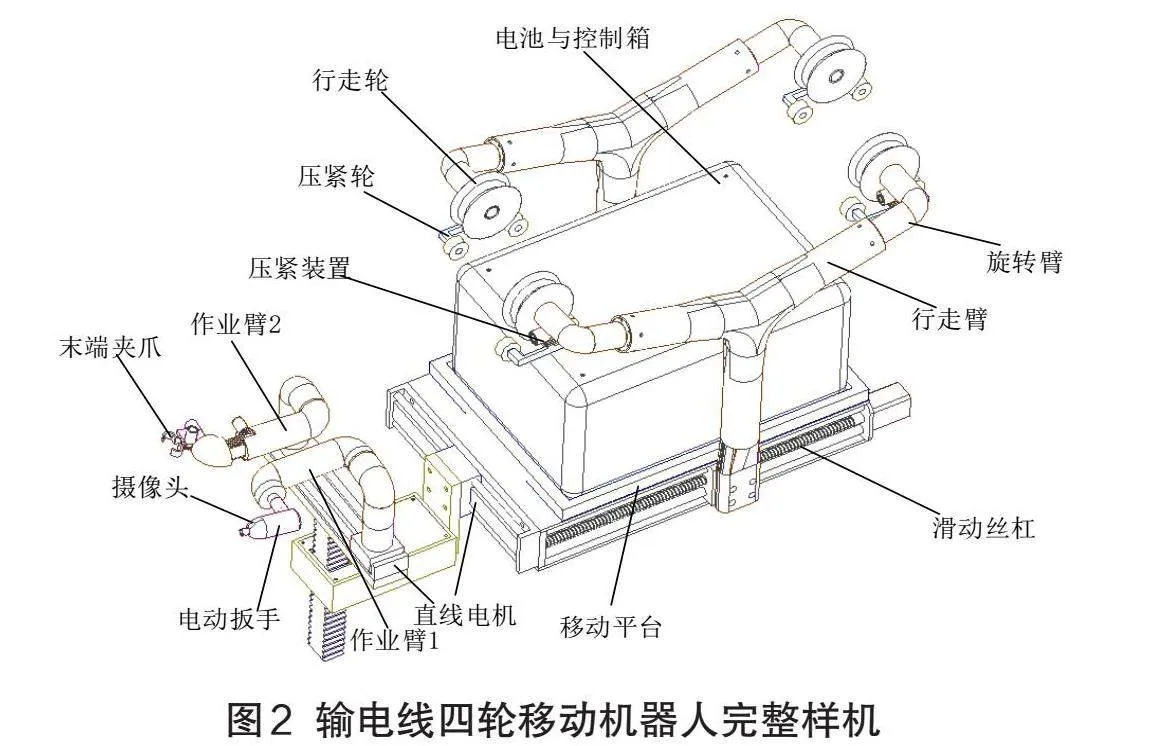
机器人的移动平台主要由高强度机架、行走臂、行走轮、高能量密度锂电池和本体测控平台组成,如图2所示。高强度机架承受来自作业臂、行走臂、高能量密度锂电池和本体测控平台重力、惯性力、摩擦力等,受力大且情况复杂。机器人旋转关节由关节模组实现,其主要由减速器、力矩电机、角度编码器、驱动器、传感器等组成,有着集成度高、重量轻、体积小、输出力矩大的优点[11]。滑动丝杆在电机的驱动下将动力传给行走臂。两行走臂置于主体两侧,四个行走轮分别与两行走臂配合,并通过旋转臂联接,旋转臂可绕行走臂轴线旋转使行走轮能快速完成上线或下线动作。安装的等电位机构保证了机器人处于等电位工作状态。高能量密度锂电池和本体测控平台分别为机器人提供电能并对其进行控制。行走轮下方的压紧轮保证了机器人在线路上平稳运动。控制箱体采用碳钎维材料,不仅避免强磁场对机器人控制系统的干扰,也减轻了机器人整体的重量[12]。移动平台相对于主体可进行横向移动。作业平台搭载了两个作业机械臂。作业臂1执行器末端的摄像头可对作业对象进行视觉定位,作业臂2末端夹爪通过电机来控制开合。作业臂2上的齿轮齿条传动方式使作业臂可实现沿其轴线方向的移动,机械臂底部的直线电机可实现其横向移动。
移动平台保证了机器人具有较强的越障能力,扩大了一次上线后的作业范围,提高了作业效率。线路上的主要障碍物有:防震锤、间隔棒、直线悬垂以及安装于悬垂上的均压环[13],将上述障碍物作为越障目标。考虑到四分裂线的特点,将机器人设计成两边各两个行走轮,分别搭在四分裂导线下面的两根线上[14]。越障时,机器人的四个轮子先后离线,行走臂通过移动关节依次跨越障碍物。基于机器人越障方式和主要障碍物的结构和安装特点[15],发现直线杆塔悬垂上安装的均压环是机器人越障目标中最难的部分,只要机器人能够顺利越过均压环就能通过直线杆塔段中所有障碍物[16]。为避免机械臂在作业过程中出现机器人头尾平衡性差的问题[17],故将移动平台上的机箱作为重物来平稳前后重量,机箱内的角度传感器可检测机器人与水平面的倾角,控制移动平台的前后移动来调节机器人的前后配重比,使机器人整体具有良好的平稳性。
1.2越障运动规划
以机器人跨越直线杆塔上的均压环为例,来描述机器人的越障流程,如图3所示。图3(a)是带电检修作业机器人靠近直线杆塔时初始状态,此时机器人相对于悬垂线夹仍有一段距离。到达一定距离后作业臂收回,为过障做准备,如图3(b)。
(1)机器人相对悬垂线夹的定位状态。四轮机器人为四轮独立驱动,使机器人能在线上进行前进、后退。确定悬垂线夹位置,保证机器人相对于悬垂线夹定位,如图3(c)所示。当检测到机器人与前方障碍物距离较近时,机器人停止运动,行走轮的夹持器夹紧,准备过障。
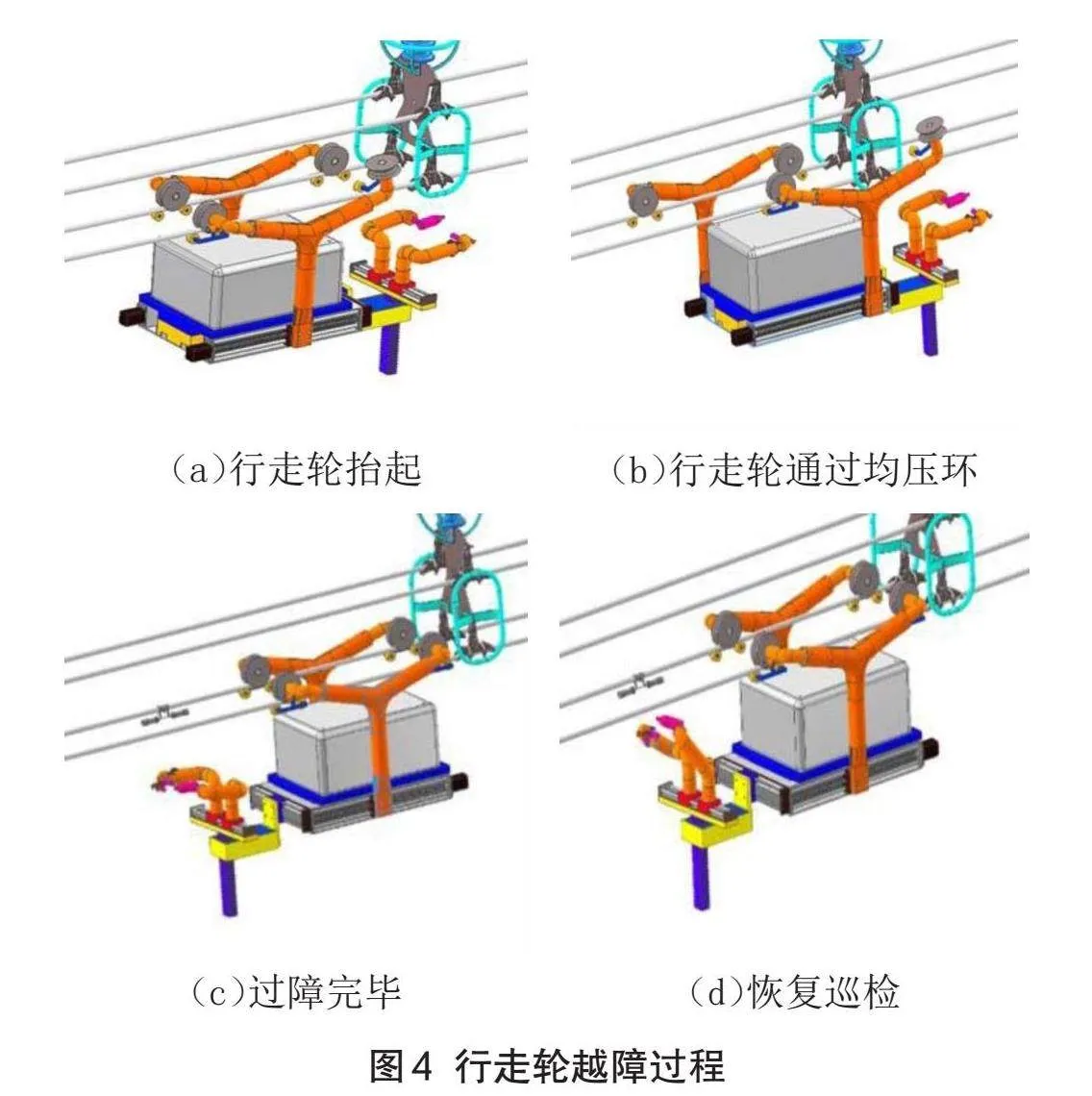
(2)机器人行走轮越过障碍物。先越障一侧的靠近障碍物的行走轮夹持器松开,并向下翻转90°,行走轮向上翻转90°,行走轮离线,离开与均压环干涉的区域,如图4(a)。离线的行走臂沿导线方向前进,前部行走轮移动至均压环的另一侧,如图4(b)。行走轮旋转落线,夹持器夹紧,完成越障。另一侧靠近障碍物的行走轮越障过程同上述。
(3)带电检修机器人完成越障。类似,另外两只未过障的行走轮用(2)中的方法通过障碍物。机器人完成过障,如图4(c);作业臂展开,继续巡检,如图4(d)。
1.3作业运动规划
机器人在线上的作业任务包括将偏移的防震锤进行复位和对耐张线引流版的螺栓紧固[18],故将机器人结构进行模块化分类,根据不同作业任务,选择相应执行机构,重构机器人末端工具。机器人作业部分主要划分为两个模块:一类是执行器模块,分别为金具销推入/挑出末端、金具及销夹持/张开末端、螺栓紧固末端,其中防振锤复位作业和耐张线夹螺栓紧固作业共用螺栓紧固末端。执行末端位姿根据需要进行微调,直接作用于工作目标;第二类为双作业手模块,各作业手均由多个关节串联而成,各关节协调运动,用于执行器末端的定位或者配合相应的末端作业。
(1)防震锤复位作业如图5(a)所示。机器人运动至工作位置时,行走臂前部行走轮碰检到防振锤上挂板,完成对防振锤的初定位;而后行走臂退后几步,双作业手进行防振锤拆卸操作。调节主作业臂各关节,完成夹持末端与防振锤的相对定位,末端夹爪夹住防震锤上挂板两侧面,调节作业臂各关节,当拧防振锤螺栓末端套筒轴线对准防振锤上的螺母轴线后,控制纵移关节,使末端套筒纵向移动靠近螺母并与之配合,启动拧防振锤螺栓末端电机,带动套筒旋转将螺母拧松至螺栓柱底端,末端电机停止转动,副作业手纵移关节带动拧防振锤螺栓末端退出工作位,主作业手带动定位与夹持末端运动将防振锤推至复位指定位置。
(2)耐张线夹引流板螺栓紧固作业图5(b)所示。机器人的定位同上述防震锤复位作业中机器人的定位方法。对主作业手的旋转和纵移关节进行调整,使主作业手携带的螺栓固定末端套筒将螺栓头压住,以限制其转动;接着进行拧螺母操作,对副作业手的横移、旋转、伸缩及纵移关节进行调整,使拧螺栓套筒与螺母同轴心并将螺母完全套住,拧螺母装置电机旋转,进行螺母的拧紧;当机器人完成一套螺栓组件的紧固工作后,拧螺母装置以及螺栓固定装置分别由主、副作业手纵移装置携带至外限位,进行下一个螺栓紧固作业。
2四轮移动机器人运动学建模
2.1双臂D-H坐标系的建立
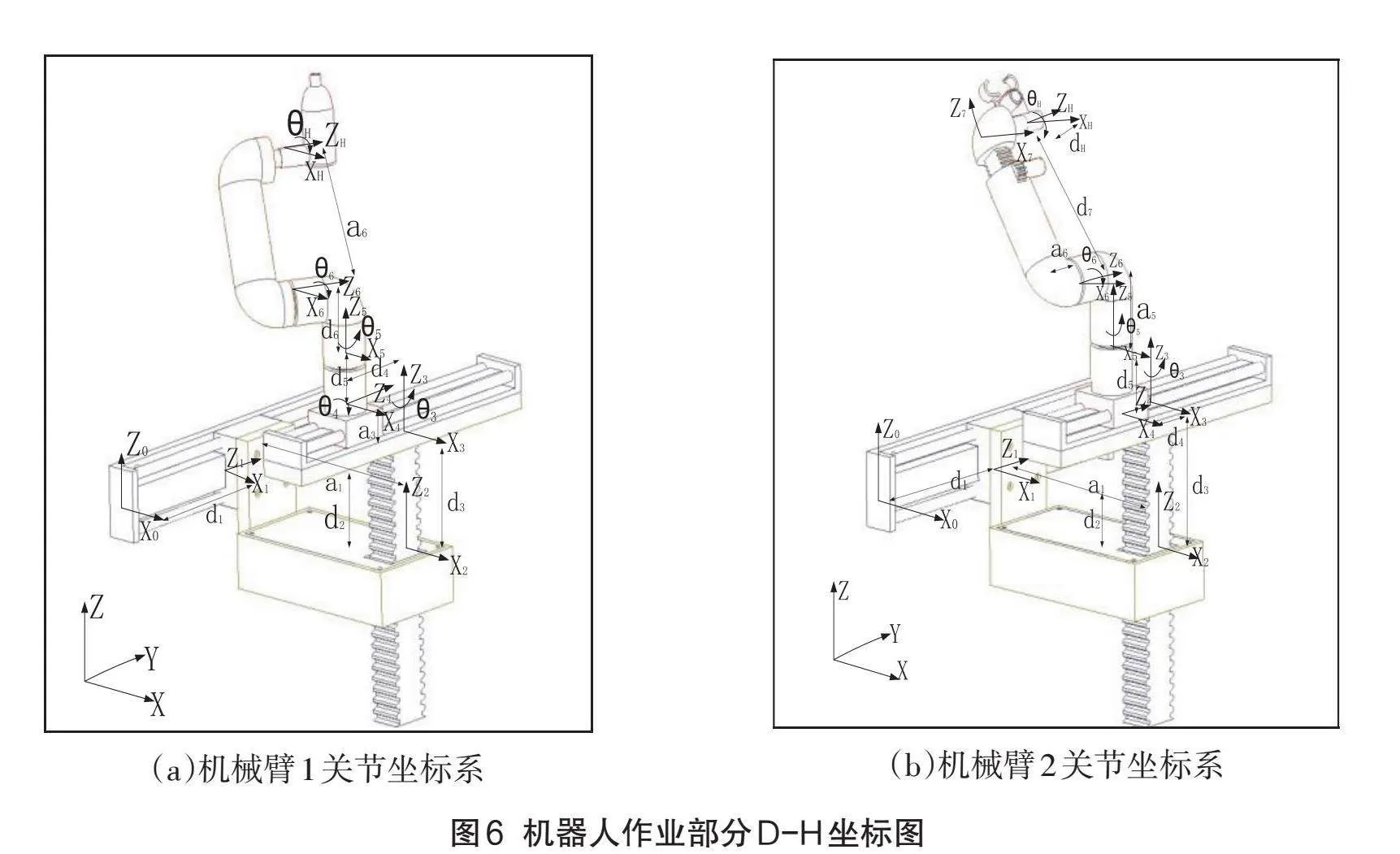
采用D-H法对机器人作业部分的杆件建立坐标系如图6所示[19]。移动机构由两个纵向移动关节、一个旋转关节和上下伸缩关节,机械臂1由三个旋转关节组成,机械臂2为三个旋转关和一个伸缩关机。将机器人的机架部分作为基坐标系C0,与机架固连导轨上的滑块作为移动关节建立坐标系C1,在移动机构的伸缩关节建立坐标系C2,旋转关节上建立坐标系C3,在机械臂与伸缩关节相连接部分建立坐标系C4,在机械臂1旋转关节1上建立坐标系C15,旋转关节2建立坐标系C16,旋转关节3建立坐标系C17,在机械臂2旋转关节1上建立坐标系C25,在旋转关节2上建立坐标系C26,在伸缩关节上建立坐标系C27,旋转关节C28。
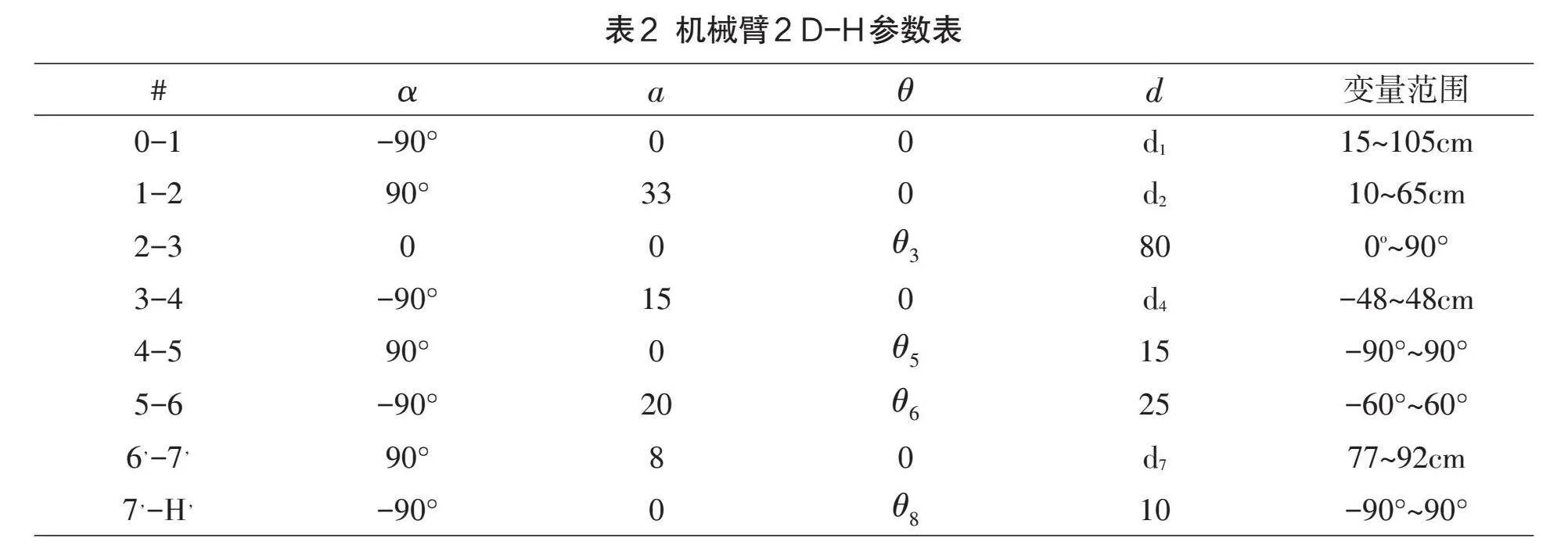
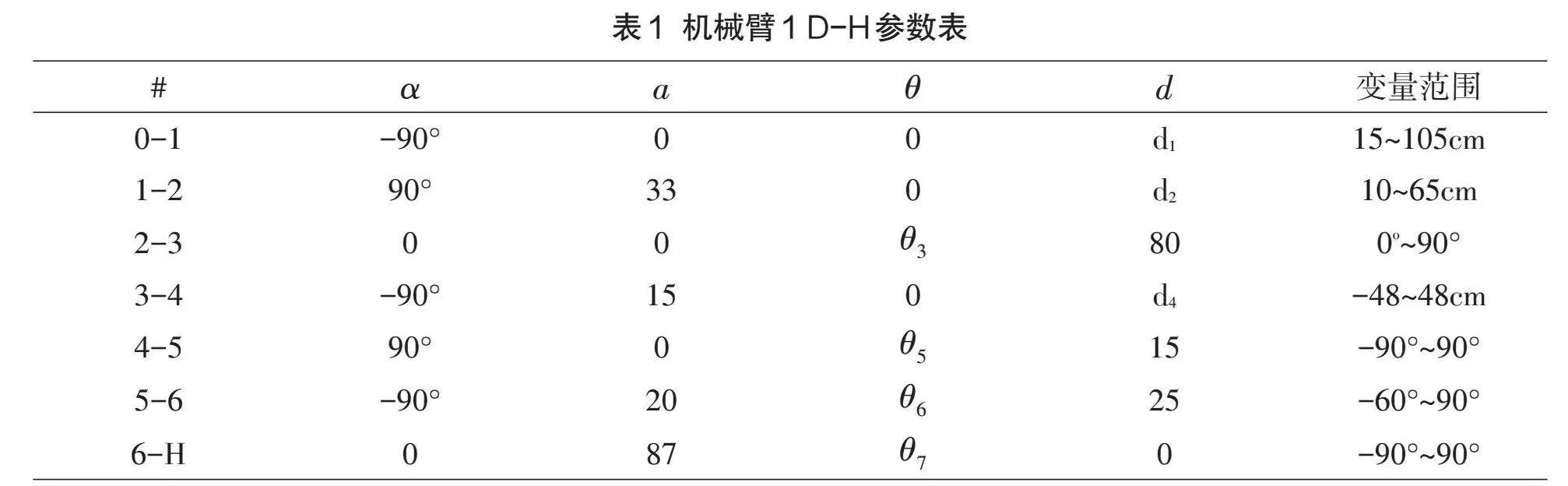
根据图6各关节上所建立的坐标系,可知关节间的姿态变化即为相邻坐标系之间的变化,D-H法下的相关参数分别为:连杆的扭角α,连杆长度a,相邻连杆之间的偏距d,关节角θ,机械臂1和机械臂2的相关参数如下表所示。
2.2作业机械臂正运动学模型的推导
将i-1连杆两端的关节坐标系分别表示为{i-1}和{i},含有α、a、θ、d四个参数的变换矩阵i(i)-1T可将坐标系{i-1}和{i}联系在一起。经过绕xi-1轴旋转αi-1角、沿xi-1轴移动ai-1、绕zi轴转θi角、沿zi轴移动di,得到相邻连杆之间的齐次变换矩阵i(i)-1T的一般表达式:
式中Cθi表示cosθi,Sθi表示sinθi,Cαi-1表示cosαi-1,Sαi-1表示sinαi-1。将表1、表2中机械臂的D-H参数分别带入式(1)中,得到机械臂相邻杆件的位姿变换关系即各连杆的坐标变换矩阵,机械臂1和机械臂2的坐标变换矩阵分别如式(2),(3)所示。
将上述公式中各杆的坐标变换矩阵相乘,并将初始状态下的值带入公式,可得到机械臂1、2末端执行器坐标系到基坐标系的变换矩阵,即得到机械臂运动的正解,由式(4)、(5)所示。
其中S(θi±θj)表示sin(θi±θj)、C(θi±θj)表示cos(θi±θj)。由(4)、(5)式可得机器人运动学正解如式(6)。
机械臂在初始状态下,参数d1取15,d2取10,d4为取0,使机械臂处在相对于机器人整体的合适位置。d7取值为0,使机械臂上的伸缩关节处在收回的位置,减小机械臂在非工作状态下的整体尺寸。θ3、θ7、θ5、θ8初始状态下取值均为0,θ6限制在-60°至90°之间,在确保机械臂末端有足够的工作空间的同时,避免了机械臂与机体其他部位发生碰撞,保证了机械臂在安全的工作空间中。初始状态下θ6取值为90°,使得机械臂整体与基坐标系x轴保持平行,降低机器人前进时,机械臂可能与线缆发生碰撞的风险。将初始值代入得式(7)。
2.2作业机械臂逆运动学模型的推导
已知机械臂末端的目标位置通过逆运动学分析得到各关节的角度值。在机械臂处于期望位姿的状态下,限制各关节角度、位移的大小,反解出各旋转关节对应的θ值和平移关节的d值[20]。相邻杆件齐次变换矩阵1(0)T-1、2(1)T-1、3(2)T-1的逆矩阵,如(8)式。
分别对式(5)等式两端同时左乘1(0)T-1、左乘2(1)T-1∙1(0)T-1和左乘3(2)T-1∙2(1)T-1∙1(0)T-1得到式(9)。
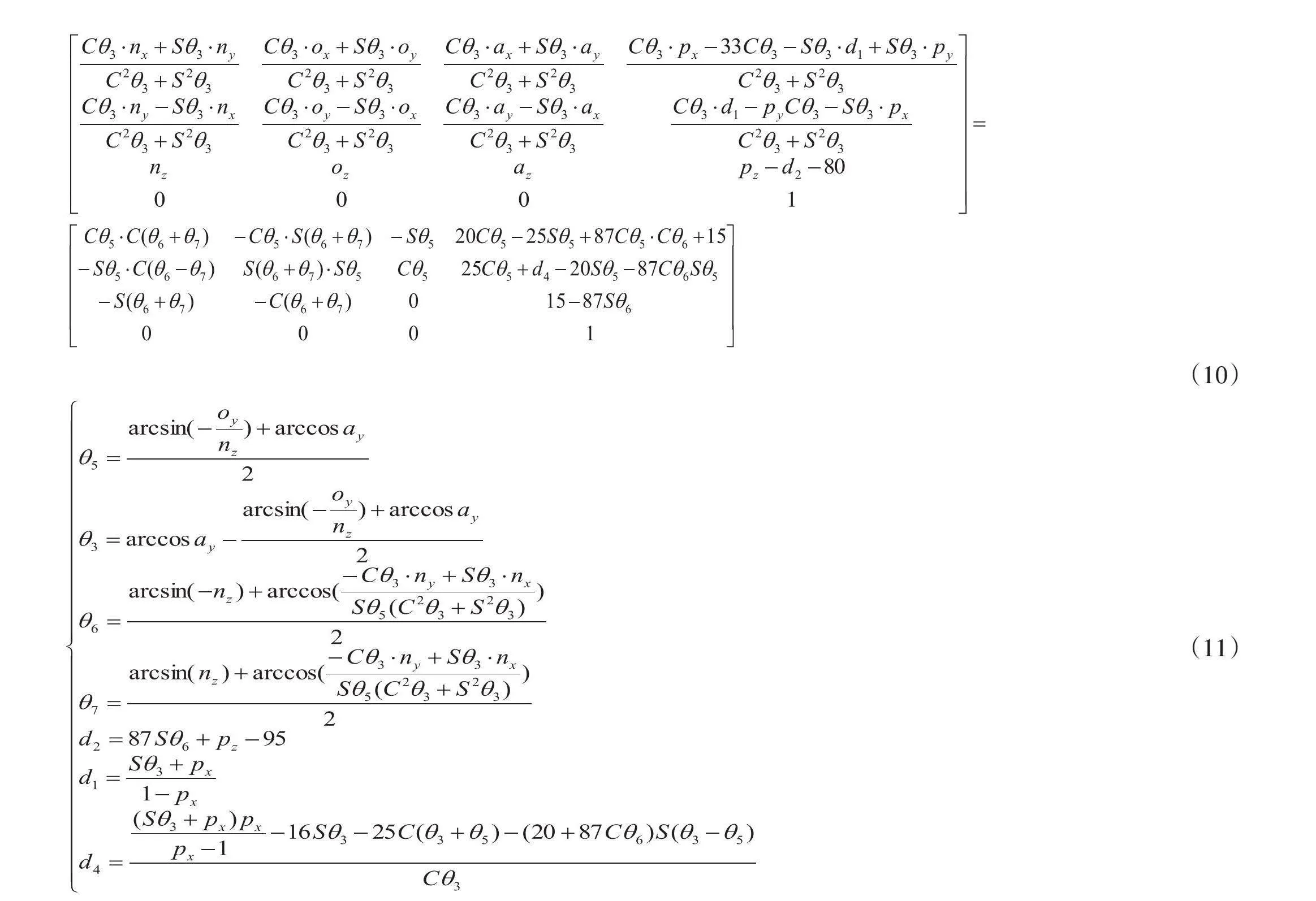
对式(9)的等式两边分别计算可得式(10)。
其中C(θi+θj)表示cos(θi+θj)、S(θi+θj)表示sin(θi+θj)。由(10)式可得(11)式。
求得θ3、θ5的数值,将数值带入其他式求得θ6、θ7,以及移动关节的位移值d1、d2、d4。由此在已知
机械臂期望位姿下通过逆运动学推导出各关节旋转、移动的数值。
3机器人系统作业部分运动学仿真实验
3.1作业机械臂末端运动轨迹仿真
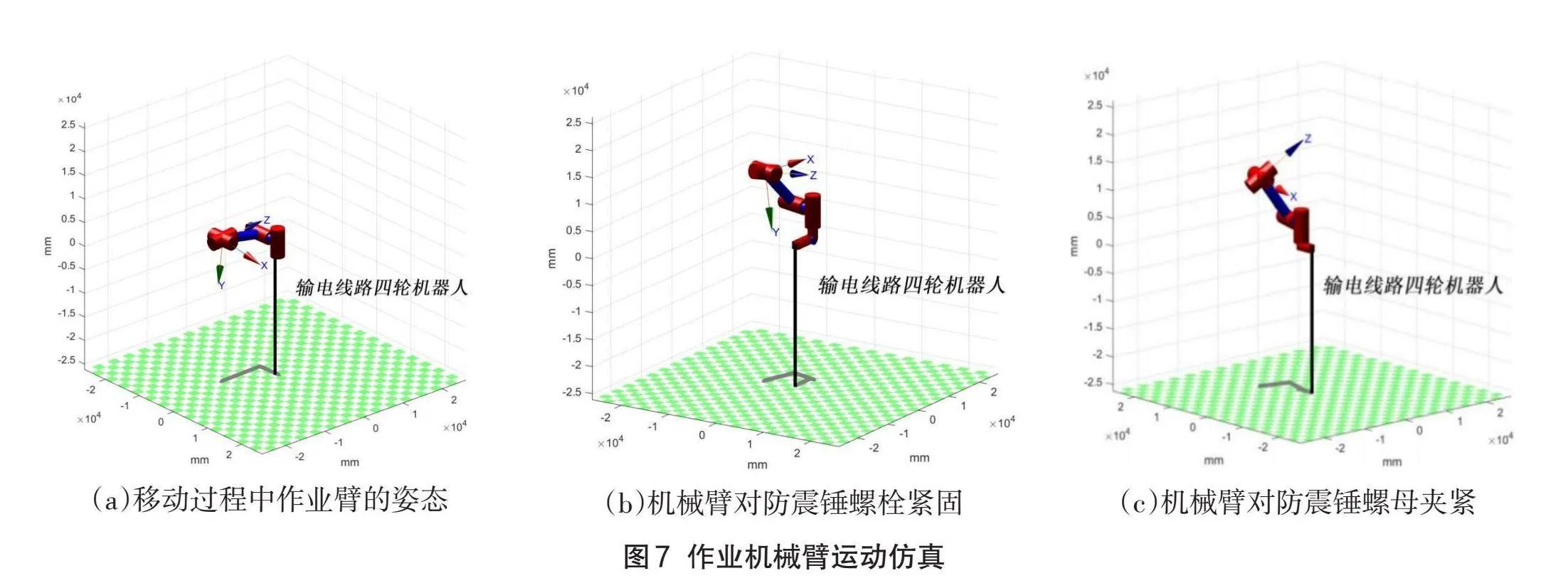
以防震锤复位作业为例进行作业机械臂轨迹规划仿真,仿真结果如图7所示。在MATLAB中设置机械臂杆长、关节的运动范围等相关参数,研究不同作业环境下机械臂的运动状态[17]。机器人在移动过程中前端机械臂各关节都为初始值,机械臂为初始姿态如图7(a)所示。机器人到达作业位置,机械臂由初始状态转变为作业状态,移动关节和旋转关节的配合下,机械臂末端执行器靠近防震锤螺栓对其进行紧固如图7(b)所示。同时另一只机械臂末端执行器对螺母进行夹紧如图7(c)所示。
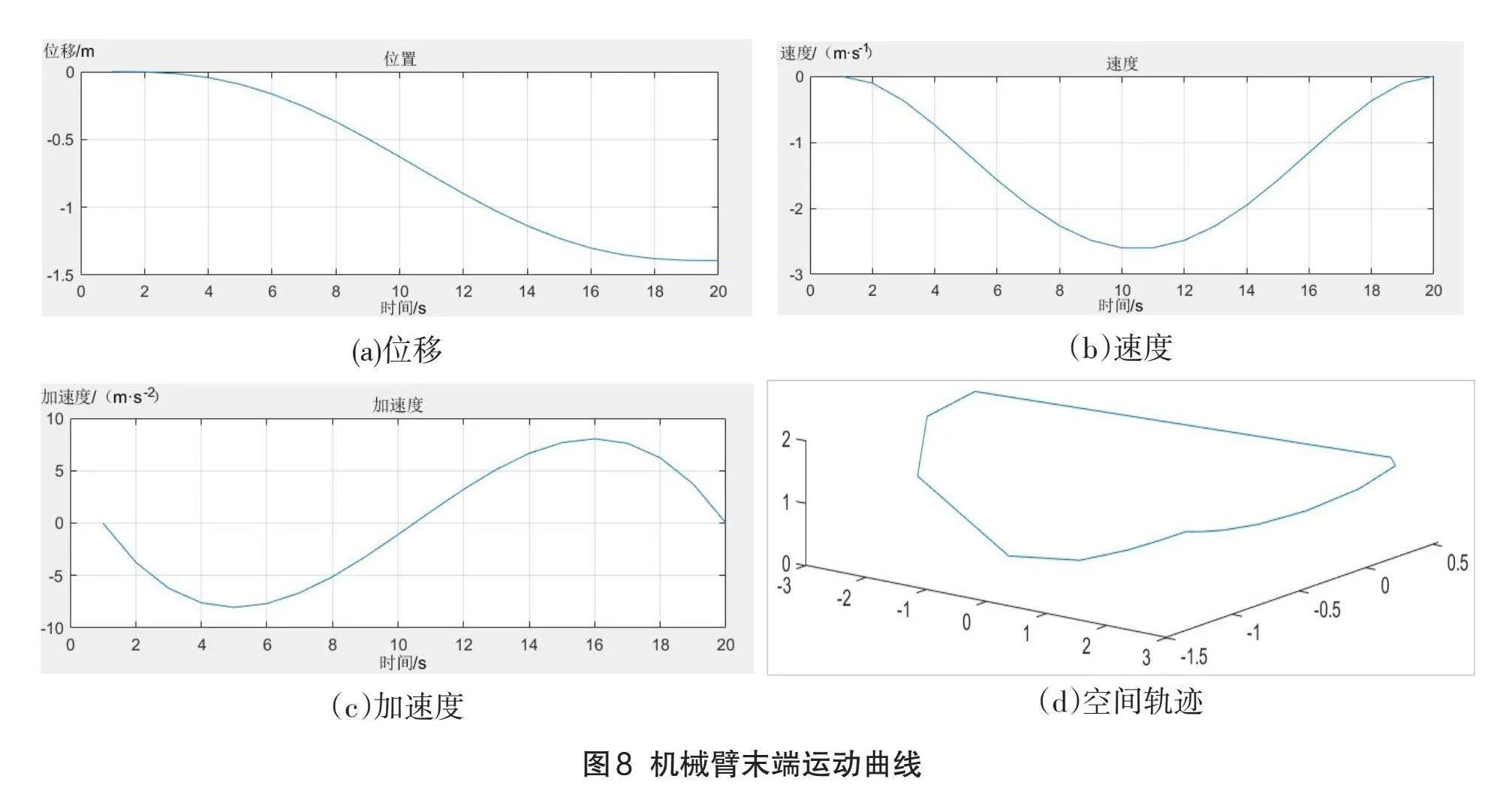
以上仿真表示机械臂由初始位置到目标位置,得到对应状态下末端坐标参数,并对机械臂末端进行运动学分析,通过逆运动学求解得到各关节在约束范围内的角度值。本文采用五次多项式的方法来规划机械臂末端轨迹。在MATLAB环境下得到机械臂末端在作业过程中的位置、速度和加速度如图8,图8(b)中末端速度0到10秒逐渐增大,在10秒左右达到最大速度,且速度曲线平滑、连续,没有速度突变,表明机械臂在运动过程中平稳性较好。机械臂作业空间中的主要障碍物为线缆和机器人机架,将机械臂在空间中的轨迹如图8(d)与实际作业环境下障碍物的位置比对,得到空间中的障碍物与上述规划的运动轨迹不会发生干涉。仿真实验结果验证了该机械臂模型的合理性,所设计的机械臂结构满足输电线路上的实际作业需要,且机械臂运行平稳,不会与空间障碍物发生碰撞。
3.2机械臂作业空间仿真
本文在MATLAB环境下,采用蒙特卡罗法对机械臂末端的作业空间进行仿真分析。在螺栓紧固的作业中,根据机器人的实际工作环境,限制各关节旋转角度或移动距离,取5000个随机值,求解机械臂末端可达到的空间范围并形成点云图,分别为xoy、xoz、yoz的平面内如图9所示。从图上分析,作业空间边缘处点较为密集,作业空间内部点较为稀疏。在机械臂横移关节和纵移关节的配合下,机械臂末端可到达的作业范围较大,能够满足机械臂在实际工作环境下的要求。
4结论
(1)该四轮移动机器人较单臂作业机器人适用范围更广,兼有跨越线上障碍物和线路巡检的功能,能够顺利完成线路上耐张线夹引流板螺栓的紧固和防震锤的复位作业。
(2)建立了作业机械臂各关节坐标系,并对其进行正逆运动学求解,得出机械臂能够实现不同的位姿变换和完成线上作业任务,验证了该机械臂满足预期的作业要求。
(3)通过MATLAB软件对机械臂的运动轨迹和末端执行器空间作业范围进行了分析,结果表明该作业机械臂末端的作业范围广,无作业盲区,能够完成相关的作业任务。
参考文献:
[1]邹德华,蒋智鹏,乔明明,等.多分裂输电导线接续管探伤检测机器人系统设计及探测空间分析[J].科学技术与工程,2022,22(27):12016-12024.
[2]邢志伟,谭智炜,文涛,等.基于DFS的直升机电力巡检路径规划[J].计算机工程与设计,2021,42(6):1779-1786.
[3]何缘,吴功平,王伟,等.高压输电线路智能巡检机器人的研制与应用[J].武汉大学学报(工学版),2016,49(3):446-451.
[4]卢坤媛,王吉岱.高压输电线路巡检机器人机械结构研究现状及发展趋势[J].机床与液压,2021,49(9):41-45.
[5]毛先胤,马晓红,牛唯,等.一种三臂式输电线路巡检机器人机械结构设计[J].自动化与仪器仪表,2021(8):192-195.
[6]叶长龙,闫法兵,姜春英,等.模块化轮指式高压线巡检机器人[J].沈阳航空航天大学学报,2018,35(2):28-34.
[7]王怡爽,苑朝,翟永杰.一种新型架空输电线路巡检机器人的机构设计[J].西北工业大学学报,2020,38(5):1105-1111.
[8]吴功平,肖华,梁康,等.高压输电线路模块可重构移动作业机器人的设计及实现[J].武汉大学学报(工学版),2014,47(2):260-265.
[9]顾苏,邹德华,邝江华,等.双分裂高压输电线路四轮移动检修机器人虚拟样机设计与仿真[J].机床与液压,2022,50(11):60-66.
[10]苏康佳,杨芳艳,陈媛媛.特种机器人关节模组设计及辐射防护[J].农业装备与车辆工程,2023,61(9):56-61.
[11]江维,吴功平,曹琪,等.输电线路带电作业机器人机械手RBF神经网络控制[J].东北大学学报(自然科学版),2017,38(10):1388-1393.
[12]陈凯,张孝祖,李晓波,等.输电线路防震锤更换带电作业机器人的研究与设计[J].电气技术与经济,2023(5):61-63.
[13]俞辉,章旭泳,戴建华,等.500 kV输电线路四分裂导线电动飞车研制[J].武汉大学学报(工学版),2022,55(2):204-210.
[14]Alhassan A B,Zhang X,Shen H,et al.Power Transmis⁃sion Line Inspection Robots:a Review,Trends and Chal⁃lenges for Future Research[J].International Journal of Elec⁃trical Power&Energy Systems,2020,118:105862.
[15]Seok K H,Kim Y S.A State of the Art of Power Transmis⁃sion Line Maintenance Robots[J].Journal of Electrical Engi⁃neerin&Technology,2016,11(5):1412-1422.
[16]刘爱华,罗恩博,李浩涛,等.一种双臂四轮输电线路巡检机器人的研制[J].机械设计与制造,2023(7):125-127.
[17]Yan Y,Jiang W,Zhang A.Research on Configuration De⁃sign and Operation Effect Evaluation for Ultra High Voltage(UHV)Vertical in Sulator Cleaning Robot[J].Industrial Ro⁃bot:An International Journal,2020,47(1):90-101.
[18]吴昊.500kV线路耐张线夹引流板发热原因分析及对策[J].科技与创新,2016(9):120.
[19]P.K,Bibhuti B C.Optimization of DH Parameters of 6R Robotic Manipulator Using JAYA Approach[J].Internation⁃al Journal of Manufacturing,Materials,and Mechanical En⁃gineering(IJMMME),2022,12(1):293-224.
[20]杨发.四分裂导线巡检机器人检修机械臂运动规划[D].华北电力大学,2021.
Design and Operation Space of Mechanical System of Four-wheel Mobile Operation Robot of Transmission Line
YU Junkang1,JIANG Wei1,ZOU Dehua2,3,LI hongjun1,CHEN Wei1
(1.School of Mechanical Engineering and Automation,Wuhan Textile University,Wuhan Hubei 430073,China;2.Live Inspection and IntelligentOperation Technology State Grid Corporation Laboratory,Changsha Hunan 410100,China;3.Hunan Province Key Laboratory of Intelligent LiveWorking Technology and Equipment(ROBOT),Changsha Hunan 410100,China)
Abstract:In order to meet the operational requirements of multi-split ultra-high voltage transmission lines and address the issues of limited functionality,insufficient obstacle-crossing capability,and a small operating range of current single-line operation robots,this paper propos-es a new configuration for a four-wheeled mobile operation robot for power transmission lines.The robot adopts a structure with a four-wheeled mobile platform and dual robotic arms,allowing it to possess dual functions of obstacle crossing and operation.The design of the walking arm provides the robot with strong obstacle-crossing capabilities,while the robotic arms equipped with end tools can accomplish various tasks on the transmission lines.Based on the structural design,a virtual prototype model of the robot was developed using INVEN-TOR software.The robotic arm's operational process was modeled and analyzed kinematically.Finally,using the Monte Carlo method in the MATLAB environment,a simulation of the operational space of the robotic arm's end effector was conducted.The motion trajectories of the robotic arm under different tasks were simulated and analyzed using the robotics toolbox.The results indicate that,firstly,the designed four-wheeled mobile robot achieves pose transformation of its walking wheels by the coordinated movement of the rotating joints and lateral movement joints on the walking arm,allowing it to traverse obstacles on the line such as seismic hammers and pressure rings.Secondly,the end-effector,a self-reconfigurable operational mechanical arm,is capable of grasping and performing operations on hardware along the line,completing tasks such as resetting seismic hammers and tightening bolts on the tension-resistant line clamps and drainage board.Thirdly,the complete robot system exhibits strong obstacle-surmounting capabilities and flexible mechanical arm operational capabilities,enabling it to accomplish inspection tasks along the entire line.
Keywords:multi-split ultra-high voltage transmission lines;four-wheeled mobile operation robot;virtual prototype;simulation of the opera-tional space;inspection operation
(责任编辑:李强)
