
海上吊车多传感器融合姿态角度解算方法研究
2024-12-04 00:00:00魏文涛
中国新技术新产品 2024年11期
关键词:多传感器

摘 要:本文针对海上吊车姿态角度解算精度不高的问题,提出了一种基于卡尔曼滤波的多传感器融合姿态角度解算方法,即通过融合倾角传感器和陀螺仪2种传感器的数据,并采用卡尔曼滤波算法进行姿态角度解算。试验结果表明,本文所提方法能够有效降低姿态角度测量中的噪声影响,提高测量精度和稳定性。
关键词:海上吊车;多传感器;融合姿态角度解算
中图分类号:P 75 文献标志码:A
随着全球海洋工程和船舶维修需求不断增长,作为关键的工业设备,海上吊车得到了广泛应用[1]。海上环境的复杂性是姿态角度解算领域的一个显著挑战。在海洋的波浪、潮汐和风力等因素的影响下,海上吊车执行吊装任务时经常受到不断变化的外部力的影响。这些环境因素不仅增加了姿态角度的变化幅度,还引入了额外的不确定性,使解算过程更复杂。设备本身的运动引起的不稳定性也是一个重要问题。海上吊车执行任务时可能会受船体摇摆、俯仰和横滚等运动的干扰,这些运动给姿态角度的精准解算带来了挑战[2]。面对这些动态变化,现有方法表现出不足,因此需要更灵活、适应性更强的解算方法。另外,多传感器信息的融合问题也是目前研究面临的挑战之一。海上吊车通常配备多种传感器,如陀螺仪、加速度计和罗盘等,以获取关于设备状态的多样信息。然而,如何有效融合这些多源信息,以提高解算的准确性,仍然是一个需要深入研究的问题。本文深入研究了海上吊车多传感器融合姿态角度解算的方法,以有效应对目前海上吊车所面临的各种挑战[3]。
1 多传感器液压支架及其姿态角度数据获取
1.1 倾角传感器姿态角度
倾角传感器使用迈科SVT626-90型双轴倾角传感器或类似的传感器,安装在顶梁和底座上,分别采集顶梁和底座的倾斜角度数据。该传感器分辨率为0.001°,精度为0.05°,温度漂移为0.008°/℃,电压输出为0V~10V,对应的测量角度为-90°~90°。电压与角度间的关系可用公式(1)表示。
θ=18U-90 (1)
式中:θ为倾角传感器的角度;U为该电压的输出值。
倾角传感器的实际安装面临2个主要挑战,一是安装过程中可能存在载体轴与传感器敏感轴不完全平行的安装偏差;二是倾角传感器2个测量轴间可能存在耦合作用,进而影响测量准确性[4]。这些因素的叠加会导致测量误差增加,因此仅采用单一的倾角传感器无法满足精确测量的要求。
1.2 陀螺仪姿态角度
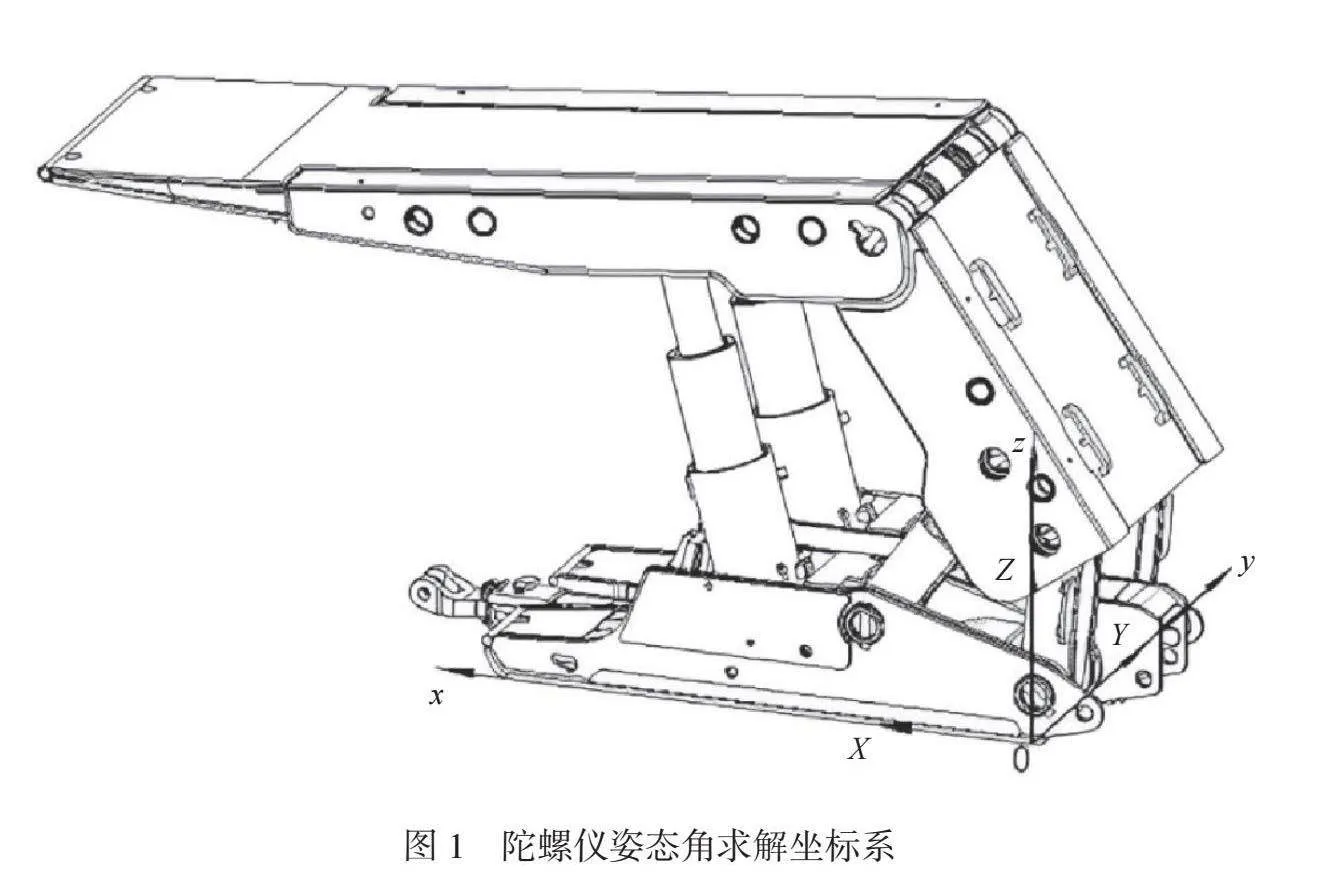
液压支架的姿态描述将东北天坐标系作为参考坐标系,该坐标系由垂直于水平面向上的Z轴、磁北极方向的Y轴和水平向东的X轴组成,如图1所示。该坐标系以水平面为基准,符合右手定则[5]。液压支架自身的坐标系被称为载体坐标系,它将陀螺仪定位在液压支架底座上。液压支架坐标系包括水平向右的X轴、水平向前的Y轴以及垂直于水平面向上的Z轴,同样符合右手定则。当液压支架没有发生姿态变化时,参考坐标系和液压支架坐标系是重合的。
在实际应用中,倾角传感器和陀螺仪各具优、缺点。倾角传感器的优势是简单、稳定且成本较低,但受安装偏差和轴间耦合等因素的影响,可能会出现测量误差。而陀螺仪具有更快的响应速度和更高的更新频率,更适用于动态环境下的姿态控制,但同时也存在漂移和积分累积误差的问题[6]。
2 卡尔曼滤波算法理论
卡尔曼(Kalman)滤波是一种通过最优估计将系统进行线性处理的滤波算法,其基于贝叶斯滤波理论,通过融合系统的动态模型和传感器测量数据,对系统的状态进行最佳估计。卡尔曼滤波的目标是在均方差最小的基础上对多传感器信息进行最佳估计,从而有效降低较大随机误差对观测值的影响,提高系统状态估计的精确性和稳定性。其估计准则如公式(2)所示。
E{[X-(Z)]T[X-(Z)]}≤E{[X-(Z)]T[X-(Z)]}
(2)
式中:X为n维系统的状态量;Z为m维度系统的观测量;(Z)为Z对X的估计,其中估计误差=X-(Z);为Z对X的其他估计。
在卡尔曼滤波中,基于最小均方误差准则,滤波过程分为时间更新(预测)和观测更新(校正)2个步骤,这2个步骤一起构成了卡尔曼滤波器的运行流程。在时间更新步骤中,通过系统模型预测系统的当前状态,从而得到系统的先验估计。这一步体现了系统状态的时间推进,将时刻k的状态值预测到时刻k+1。在观测更新步骤中,将传感器观测值作为滤波器的输入,校正先验估计,从而得到系统的后验估计。这一步体现了传感器测量值与先验估计相结合,对系统状态进行校正和调整。
3 基于卡尔曼滤波的液压支架姿态角度融合求解方法
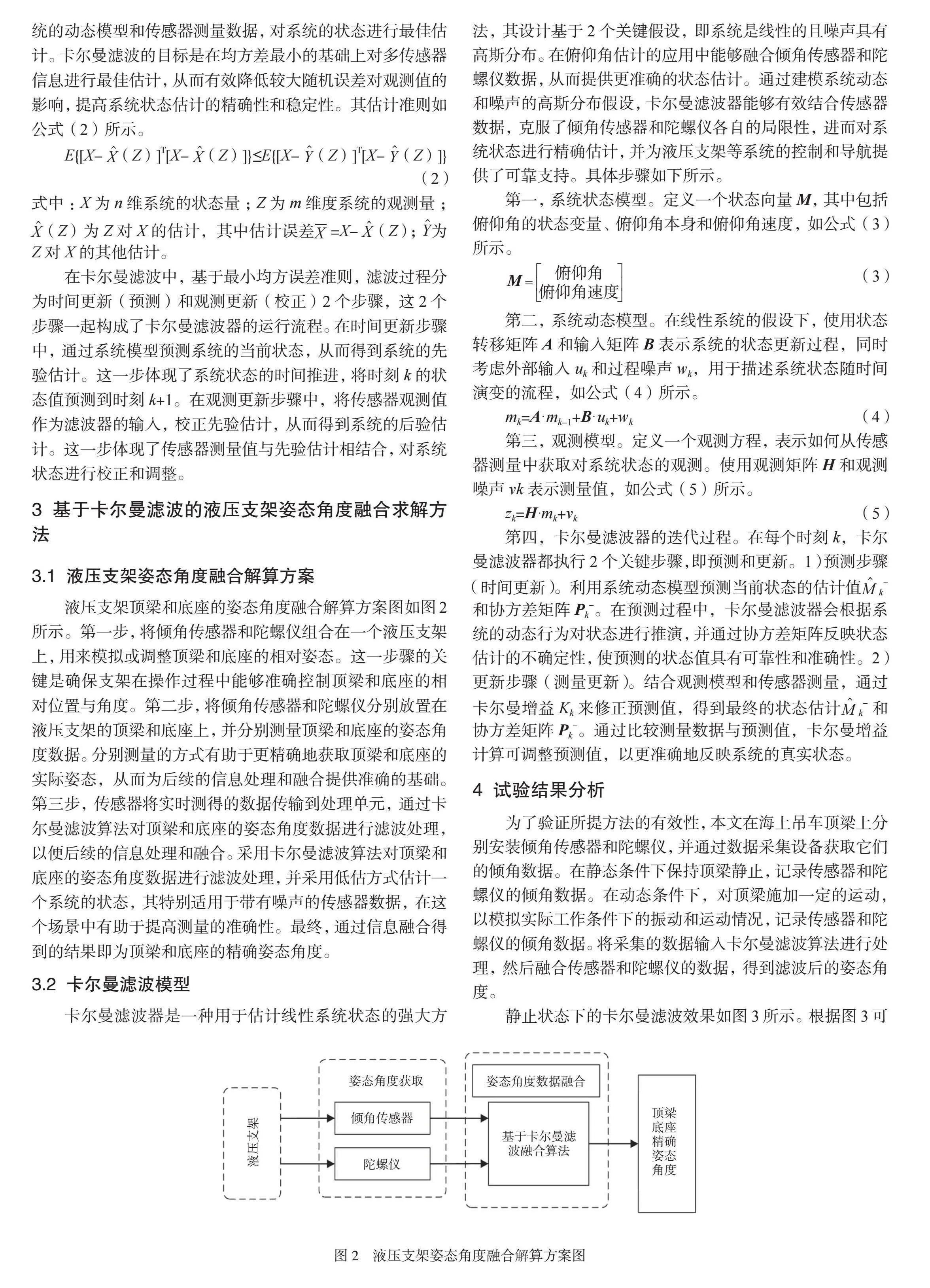
3.1 液压支架姿态角度融合解算方案
液压支架顶梁和底座的姿态角度融合解算方案图如图2所示。第一步,将倾角传感器和陀螺仪组合在一个液压支架上,用来模拟或调整顶梁和底座的相对姿态。这一步骤的关键是确保支架在操作过程中能够准确控制顶梁和底座的相对位置与角度。第二步,将倾角传感器和陀螺仪分别放置在液压支架的顶梁和底座上,并分别测量顶梁和底座的姿态角度数据。分别测量的方式有助于更精确地获取顶梁和底座的实际姿态,从而为后续的信息处理和融合提供准确的基础。第三步,传感器将实时测得的数据传输到处理单元,通过卡尔曼滤波算法对顶梁和底座的姿态角度数据进行滤波处理,以便后续的信息处理和融合。采用卡尔曼滤波算法对顶梁和底座的姿态角度数据进行滤波处理,并采用低估方式估计一个系统的状态,其特别适用于带有噪声的传感器数据,在这个场景中有助于提高测量的准确性。最终,通过信息融合得到的结果即为顶梁和底座的精确姿态角度。
3.2 卡尔曼滤波模型
卡尔曼滤波器是一种用于估计线性系统状态的强大方法,其设计基于2个关键假设,即系统是线性的且噪声具有高斯分布。在俯仰角估计的应用中能够融合倾角传感器和陀螺仪数据,从而提供更准确的状态估计。通过建模系统动态和噪声的高斯分布假设,卡尔曼滤波器能够有效结合传感器数据,克服了倾角传感器和陀螺仪各自的局限性,进而对系统状态进行精确估计,并为液压支架等系统的控制和导航提供了可靠支持。具体步骤如下所示。
第一,系统状态模型。定义一个状态向量M,其中包括俯仰角的状态变量、俯仰角本身和俯仰角速度,如公式(3)所示。
(3)
第二,系统动态模型。在线性系统的假设下,使用状态转移矩阵A和输入矩阵B表示系统的状态更新过程,同时考虑外部输入uk和过程噪声wk,用于描述系统状态随时间演变的流程,如公式(4)所示。
mk=A·mk-1+B·uk+wk (4)
第三,观测模型。定义一个观测方程,表示如何从传感器测量中获取对系统状态的观测。使用观测矩阵H和观测噪声vk表示测量值,如公式(5)所示。
zk=H·mk+vk (5)
第四,卡尔曼滤波器的迭代过程。在每个时刻k,卡尔曼滤波器都执行2个关键步骤,即预测和更新。1)预测步骤(时间更新)。利用系统动态模型预测当前状态的估计值k-和协方差矩阵Pk-。在预测过程中,卡尔曼滤波器会根据系统的动态行为对状态进行推演,并通过协方差矩阵反映状态估计的不确定性,使预测的状态值具有可靠性和准确性。2)更新步骤(测量更新)。结合观测模型和传感器测量,通过卡尔曼增益Kk来修正预测值,得到最终的状态估计k-和协方差矩阵Pk-。通过比较测量数据与预测值,卡尔曼增益计算可调整预测值,以更准确地反映系统的真实状态。
4 试验结果分析
为了验证所提方法的有效性,本文在海上吊车顶梁上分别安装倾角传感器和陀螺仪,并通过数据采集设备获取它们的倾角数据。在静态条件下保持顶梁静止,记录传感器和陀螺仪的倾角数据。在动态条件下,对顶梁施加一定的运动,以模拟实际工作条件下的振动和运动情况,记录传感器和陀螺仪的倾角数据。将采集的数据输入卡尔曼滤波算法进行处理,然后融合传感器和陀螺仪的数据,得到滤波后的姿态角度。
静止状态下的卡尔曼滤波效果如图3所示。根据图3可知,施加机械冲击载荷时,倾角传感器的测量角度明显偏离真实角度,最大角度偏差为0.11°。表明卡尔曼滤波算法对陀螺仪受噪声影响较大、偏差逐渐累积的情况能够有效地进行数据融合和修正。通过与倾角传感器测量数据进行融合,卡尔曼滤波能够减少系统误差,提高俯仰角测量的准确性和稳定性,从而在连续机械冲击情况下具有更好的性能表现。
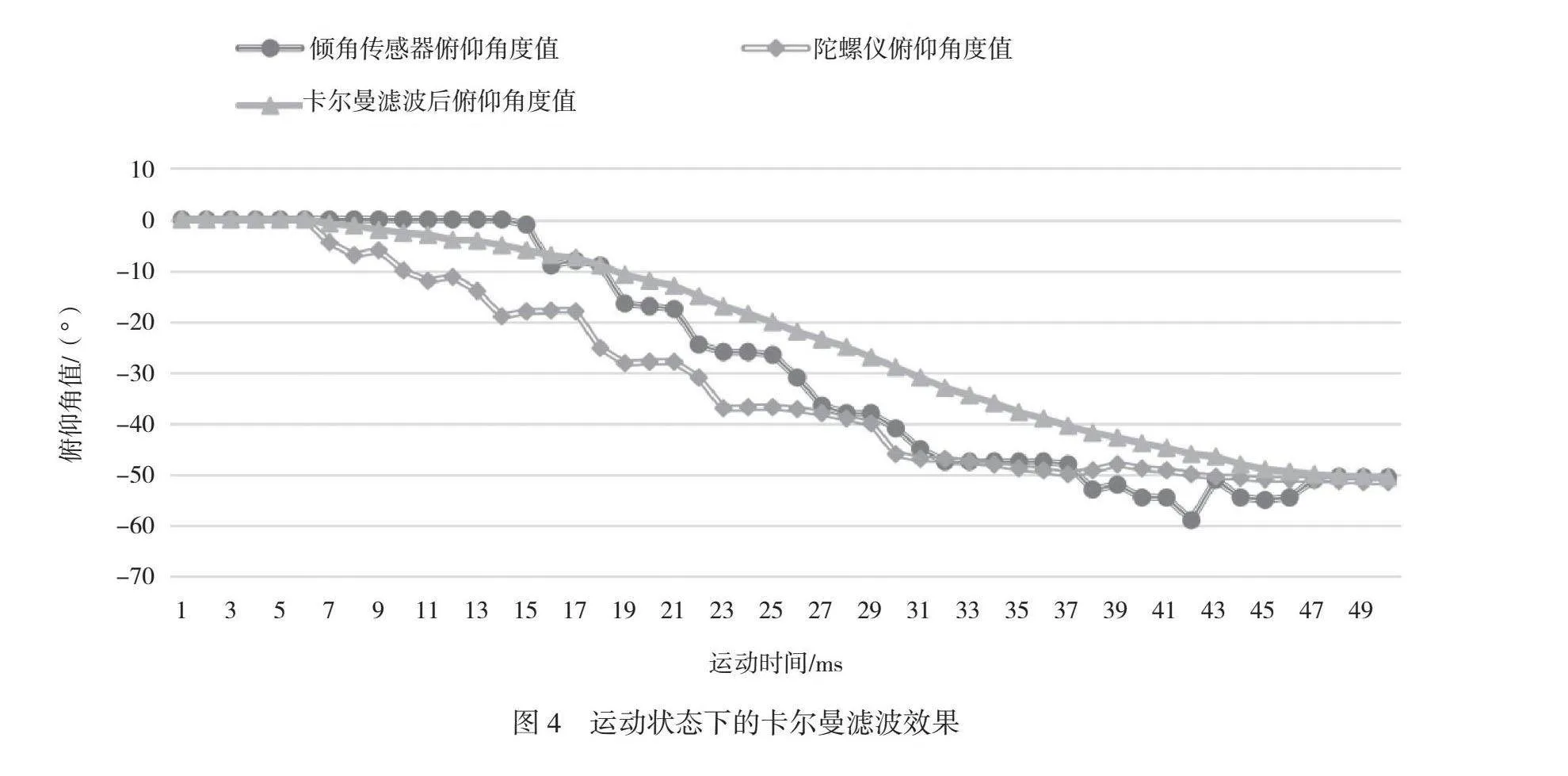
运动状态下的卡尔曼滤波效果如图4所示。根据图4可得,在动态工况下,倾角传感器受运动加速度的影响较大,特别是在43ms,测量角度甚至超过50°。倾角传感器受加速度影响几乎可达60°,导致在动态情况下,倾角传感器的测量可靠性较低。然而,通过卡尔曼滤波算法融合后的俯仰角值比单纯利用倾角传感器和陀螺仪测量的角度更可靠。经过卡尔曼滤波处理后的角度更接近真实值,表明卡尔曼滤波算法在动态工况下对姿态角度的估计具有更高的准确性和稳定性,能够有效克服倾角传感器受运动加速度影响所带来的不确定性。
5 结论
本文对海上吊车多传感器融合姿态角度解算方法进行了深入研究,提出了一种基于卡尔曼滤波的解算方法。将倾角传感器和陀螺仪2种传感器的数据进行融合处理,并采用卡尔曼滤波算法,有效降低了姿态角度测量中的噪声影响,提高了测量精度和稳定性。本文提出的融合姿态角度解算方法可为海上吊车操作人员提供准确的姿态角度信息,有助于提高操作的安全性和效率。
参考文献
[1]张英杰.海上采油平台电动吊车力矩仪改造[J].天津科技,2019,46(1):51-54.
[2]韩灏,张敬芳,郝尚清,等.支架回撤吊车摆动工况液压系统特性研究[J].煤矿机械,2019,40(2):44-46.
[3]刘国珍.液压支架回撤工艺研究[J].机械管理开发,2021,36(5):126-127.
[4]苏荣键.基于多传感器融合的线控转向系统控制研究[D].柳州:广西科技大学,2022.
[5]张剑波.基于陀螺仪与倾角仪组合的TBM姿态角测量研究[D].武汉:华中科技大学,2015.
[6]冯智勇,曾瀚,张力,等.基于陀螺仪及加速度计信号融合的姿态角度测量[J].西南师范大学学报(自然科学版),2011,36(4):137-141.
猜你喜欢
电脑知识与技术(2017年4期)2017-04-10 07:18:48
电子技术与软件工程(2016年16期)2017-03-17 00:34:04
现代电子技术(2016年24期)2017-01-19 14:56:30
计算机应用(2016年12期)2017-01-13 20:34:22
现代电子技术(2016年22期)2016-12-26 09:49:39
电脑知识与技术(2016年12期)2016-06-14 01:29:49
科技视界(2016年14期)2016-06-08 13:24:00
现代电子技术(2015年14期)2015-07-22 22:03:52
物联网技术(2015年5期)2015-07-18 13:08:22
现代电子技术(2014年24期)2014-12-18 11:53:51
