面向自动驾驶的车道级道路电子地图制作
2024-12-04 00:00:00黎枪刘飞
科技创新与应用 2024年34期

摘 要:高精度车道级道路电子地图是实现车道级导航与监控的基础地理信息数据和必要条件,未来在自动驾驶系统方面具有广阔的应用空间。该文使用全站仪、RTK进行野外测量,生产符合要求的车道级道路路网数据,包括车道数、车道宽度等属性数据,并进行地图编译,输出OpenDrive格式数据,供自动驾驶系统测试使用。
关键词:高精度地图;自动驾驶;OpenDrive;全站仪;RTK
中图分类号:P283.7 文献标志码:A 文章编号:2095-2945(2024)34-0048-04
Abstract: High-precision lane-level road electronic maps are basic geographical information data and necessary conditions for realizing lane-level navigation and monitoring, and have broad application space in autonomous driving systems in the future. This paper uses total station and RTK to conduct field surveys to produce lane-level road network data that meets the requirements, including attribute data such as lane number and lane width, and compiles maps to output OpenDrive format data for automatic driving system testing.
Keywords: high-precision maps; autonomous driving; OpenDrive; total station; RTK
随着自动驾驶技术的迅猛进步,对高精度道路地图的需求与标准不断提升,日益凸显其重要性。遵循国际公认的SAE J3016分级体系,自动驾驶技术被细化为L0至L5 6个层级,其中L3及以上级别的实现高度依赖于高精度地图的支撑,使之成为自动驾驶系统的关键基石。车道级高精度道路电子地图,作为基础且不可或缺的地理信息数据源,是实现精细化车道导航与监控的先决条件,预示着在无人驾驶领域拥有巨大的应用潜力和前景。
1 自动驾驶与车道级地图的关系
1.1 自动驾驶技术概述
自动驾驶技术是指利用计算机系统实现车辆自主行驶的技术,其核心目标是减少甚至消除人类驾驶员的干预,实现安全、高效、舒适的出行体验。自动驾驶技术涉及多个领域,如感知、决策、控制、人工智能等。目前,自动驾驶技术按照SAE(美国汽车工程师协会)的定义,分为0—5级,从完全人工驾驶到完全自动化驾驶。随着自动驾驶技术的不断发展,对于高精度、高可靠性的车道级地图的需求日益迫切。
1.2 国内外研究现状分析
在车道级地图制作领域,国内外学者已取得了一系列研究成果。国外方面,美国、德国等发达国家在自动驾驶技术及车道级地图研究方面处于领先地位。例如,谷歌旗下的Waymo公司已成功实现了自动驾驶车辆在公共道路上的测试与运营,其高精度地图技术为自动驾驶系统提供了有力支持。国内方面,我国在车道级地图制作技术方面也取得了一定的进展,如百度、高德等企业已开展相关研究,并在部分城市进行了试点应用。然而,与国外发达国家相比,我国在自动驾驶车道级地图的精度、实时性以及数据处理等方面仍存在一定差距,亟待加大研究力度,提高技术水平。
1.3 车道级地图在自动驾驶中的作用
车道级地图作为自动驾驶系统中的重要组成部分,为自动驾驶车辆提供精确的道路信息,确保车辆在复杂多变的道路环境中准确行驶。车道级地图在自动驾驶中的作用主要体现在以下几个方面:一是为车辆提供高精度的定位服务,确保车辆在正确的车道上行驶;二是辅助自动驾驶系统进行路径规划与决策,提高行驶安全性;三是提供丰富的道路属性信息,帮助自动驾驶系统更好地理解道路场景,实现与其他交通参与者的协同行驶。
2 工作流程
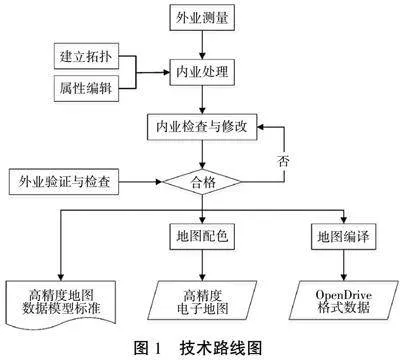
本文采用外业测量获取高精度道路信息。车道级道路电子地图的生成流程精心划分为4个核心阶段:首先是外业实地测量与数据收集及预处理,该阶段聚焦于现场数据的精确采集与初步整理;随后是车道级数据及其关联属性信息的精细提取,确保每一条车道及其特性得到全面而准确的描述;紧接着,构建车道间的拓扑关系并进行数据格式的统一转换,以符合电子地图系统的标准需求;最终,完成车道电子地图的编绘与制作,形成具有高精度与强实用性的地图产品。主要技术流程如图1所示。
2.1 外业测量数据采集和处理
2.1.1 外业测量作业流程
1)前期准备:仪器工具准备和资料准备。
2)外业采集:根据规划和要求进行外业数据采集。
3)内业处理:将测量数据输入计算机,利用CAD初步成图。
2.1.2 数据采集
本次数据收集工作将全站仪与RTK(实时动态载波相位差分技术)作为核心仪器。全站仪作为一种高度集成的光学、机械与电子技术的精密测量设备,能够在单一测站迅速执行三维坐标的测定、定位任务,并自动完成数据的采集、处理及存储流程。然而,通视条件、地形复杂性与人为干扰对其性能有显著影响;此外,为确保精度,需布设充足的控制点,从而增加了作业复杂度、成本及时间投入。
相比之下,RTK能在户外环境中即时提供厘米级的高精度定位,尤其适用于地形平坦、视野开阔的场景。但值得注意的是,在单基站作业模式下,其作业范围受限,且当遇到高大障碍物时,接收卫星与无线电信号的能力将显著减弱,进而可能降低数据的精度。
鉴于此,本文创新性地采用RTK与全站仪协同作业的数据采集模式,旨在结合两者优势,既确保测量结果的准确性,又提升作业效率与实用性,以应对复杂多变的现场环境。
按照外业测量测量要求,进行高精度车道数据采集。测量内容主要包括斑马线、停止线、道路边线、车道线、减速带、绿化带、导流线、红绿灯、车道宽度和路面交通标志等。
2.1.3 内业数据处理
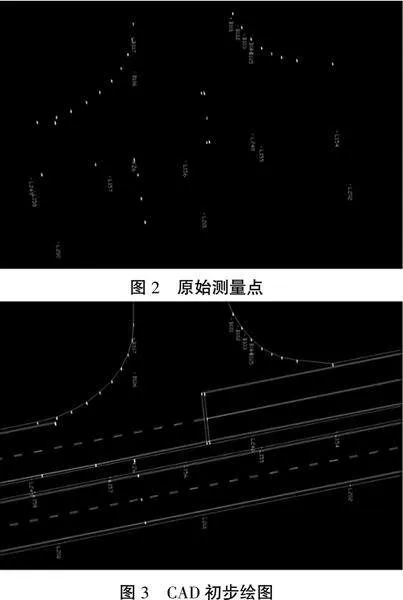
当天晚上将白天的测量结果输入计算机,利用CAD进行初步绘图,检查无误后提供给GIS部门进行后续编辑工作(图2、图3)。
2.2 车道数据及信息提取
2.2.1 确定数据图层
根据项目要求,参考GB/T 20267—2006《车载导航电子地图产品规范》,确定了自己的高精度地图数据内容及其数据结构。
其中,图层组成见表1。
2.2.2 车道级高精度地图模型
高精度地图的模型是在道路网络的拓扑结构上附着不同对象的信息,例如道路、车道、路面标志、附属设施的几何信息与属性信息。一般来说,高精度地图模型由道路模型、车道模型和路面标志及附属设施模型3个部分组成。
1)道路模型,亦可视为一种参照线体系,其本质是对传统导航地图框架的现代化诠释。在此模型中,现实世界中的道路网络被精炼抽象,通过精心选定的点集来精确刻画道路的几何形态及其相互间的连接逻辑,从而实现对道路走向与连通性的全面描绘。道路相关数据的表达是道路模型的核心,主要包括参考线几何、道路边界、道路方向、道路类型、功能等级、车道数和道路名称等信息。
2)车道模型,即车道标线,代表车道信息。它不仅记录车道行驶的参考线、边线和停止线等,还记录了车道与道路之间的拓扑关系。车道的相关数据的表达也是车道模型的核心,主要包含车道中心线、车道边界几何、车道类型、车道标线、车道方向和车道联通关系等信息。
3)路面标志及附属设施模型,即相关对象的位置、形状及属性等,代表与道路、车道相关的对象。这些要素主要包括交通信息牌、交通信号灯、防护栏、人行横道、停止线、道路标志和减速带等。
2.2.3 格式转换
CAD无法对道路矢量数据进行复杂的编辑与修改,故将CAD数据通过ArcGIS软件转换为.shp格式,以方便后续编辑处理工作。
2.2.4 数据检查与属性赋值
检查数据是否存在明显拓扑错误,并填写道路类型、道路功能、车辆行驶方向、限速、道路名称、车道类型和车道数量等道路固有属性信息。
2.2.5 地图编译
目前,广泛应用于自动驾驶系统的地图数据,多为OpenDrive格式。此格式定义了一个标准的静态地图格式,以实现不同仿真测试软件的兼容性,具体是用于描述道路网络的文件格式。
GIS格式原始矢量数据主要用于地图显示,不能直接用于自动驾驶系统。为了解决这一难题,在高精度地图制作完成后,将数据标准化,导出可直接用于自动驾驶系统的OpenDrive格式XML文件。
2.3 车道级电子地图制作
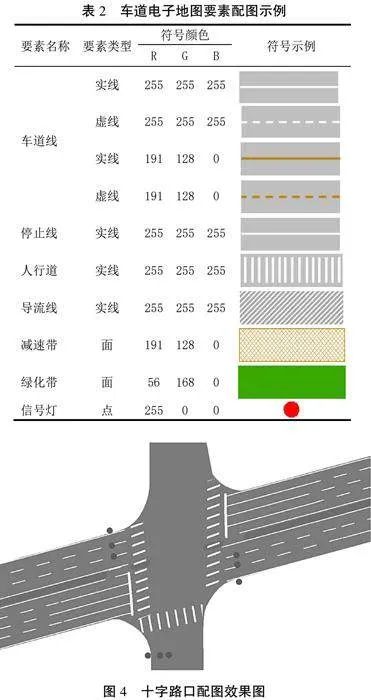
车道电子地图的构建,始于对采集到的特征点、线及其伴随属性信息的整合,随后在ArcGIS平台下,历经符号化定制、图面优化布局以及色彩渲染等精细处理步骤,最终呈现出一幅色彩和谐、视觉效果佳的地图产品。为确保电子地图在色彩搭配上协调统一,符号表达上形象直观,以及整体图面的赏心悦目,设定了一套详尽的要素展示符号配置准则,该准则详尽规定了各类要素及其标注的样式设计、尺寸规格和色彩选择等关键要素。详见表2、图4。
2.4 高精度地图数据模型标准
高精度地图的检验标准和评价指标尚未出台,以及相关标准是否会对地图精度造成影响,这些都是高精度地图未来所要面临的挑战。结合实验项目,综合考虑各方面因素,制定了一套高精度地图数据模型标准,仅供内部参考与使用。
3 关键技术研究
3.1 高精度定位技术
在面向自动驾驶的车道级道路电子地图制作过程中,高精度定位技术是至关重要的。本研究采用了全球导航卫星系统(GNSS)、惯性导航系统(INS)以及地面辅助定位系统等多源数据融合技术,实现了车辆在复杂道路环境下的高精度定位。通过卡尔曼滤波算法对定位数据进行实时处理,有效提高了定位精度及稳定性,为车道级地图的制作提供了坚实基础。
3.2 车道线检测算法
车道线检测是自动驾驶系统中的关键环节,对于保证车辆在正确车道行驶具有重要意义。本研究提出了一种基于深度学习的车道线检测算法,通过对大量实际道路场景的图像进行训练,实现了对不同光照、天气及道路条件下的车道线识别。此外,结合地图数据,实现了车道线的实时检测与更新。
3.3 道路场景理解与建模
为了使自动驾驶系统能够更好地适应复杂多变的道路环境,本研究对道路场景进行了深入理解与建模。利用深度学习方法,对道路场景中的各种元素(如车道线、标志牌、行人和车辆等)进行识别与分类。同时,结合地图数据,构建一个层次化的道路场景模型,为自动驾驶系统提供丰富的环境感知信息。
4 结束语
在限定的小规模区域内,采用全站仪与RTK进行全面的野外实地测量,展现出卓越的测量性能:高精度、高效率与低成本兼具。通过严格控制,确保所有测量点的精度均维持在3 cm以内,充分满足了道路基础设施地理信息采集的高标准需求,为构建高精度的道路电子地图奠定了坚实基础。将这份高精度的车道级电子地图与车辆的实时定位技术深度融合,不仅加速了智能无人驾驶技术的研发步伐,更为智能交通管理、高级驾驶辅助系统等前沿领域开辟了广阔的应用空间,展现出巨大的发展潜力。
参考文献:
[1] 周知红.面向无人驾驶的车道级道路电子地图制作[J].测绘与空间地理信息,2018,41(2):164-166,170.
[2] 郑斌,杨婷,羌鑫林.基于移动测量技术的车道级道路电子地图制作[J].现代测绘,2016,39(6):42-45.
[3] 余卓渊,闾国年,张夕宁,等.全息高精度导航地图:概念及理论模型[J].地球信息科学学报,2020,22(4):760-771.
[4] 李鑫慧,郭蓬,戎辉,等.高精度地图技术研究现状及其应用[J].汽车电器,2019(6):1-3.
第一作者简介:黎枪(1996-),男,助理工程师。研究方向为测绘导航。