信息采集智能车系统设计与实现
2024-11-02 00:00孙宇舸叶柠周孜耕
科技创新与应用 2024年31期

摘 要:在现代社会生活中,信息采集智能车在环境监测、生态研究、地质勘探等诸多领域发挥着重要作用。该文基于ESP32微处理器设计和开发具有自动避障和语音控制功能的信息采集智能车系统,通过在智能车系统搭载多传感器信息采集模块,实现不同位置环境信息的实时采集、传输与显示。经过实际测试,验证系统功能完善,易于使用与扩展。
关键词:智能车;信息采集;自动避障;语音控制;数据传输
中图分类号:U463.6 文献标志码:A 文章编号:2095-2945(2024)31-0042-04
Abstract: In modern social life, information collection smart vehicles play an important role in many fields such as environmental monitoring, ecological research and geological exploration. This paper designs and develops an information collection smart vehicle system with automatic obstacle avoidance and voice control functions based on the ESP32 microprocessor. By equipping the smart vehicle system with a multi-sensor information collection module, real-time collection, transmission and display of environmental information from different locations are realized. Through actual testing, it has been verified that the system has complete functions and is easy to use and expand.
Keywords: smart vehicle; information collection; automatic obstacle avoidance; voice control; data transmission
在现代社会,科技进步与创新正迅速改变着人们的生活方式和经济发展模式。人工智能技术的普及和应用为各行各业带来了前所未有的机遇[1]。在这样的社会背景下,信息采集智能车作为一种典型的智能硬件设备,具有广泛的应用潜力和社会价值。
在智能车研究方面,国外起步较早,典型的研究代表如美国卡耐基梅隆大学的NavLab-5智能车、谷歌公司的Google Driverless Car[2]等。2016年,特斯拉推出 Autopilot 辅助驾驶功能,驾车者能够脱离方向盘对车辆进行控制。特斯拉遵循“仿生”原则,利用多摄像头模拟人类视觉,摈除了多颗毫米波雷达等非必要的冗余措施提高成本效益[3-4]。我国智能车的研究虽然起步较晚,但目前也具有较好的成果。一方面,传统车厂陆续制定了各自的智能驾驶发展规划,另一方面,互联网科技企业如百度、阿里、华为等,深度布局智能驾驶解决方案、高精度地图、激光雷达和车联网等领域[5]。
本文基于智能车的信息感知和控制需求,采用多传感器实现环境基础信息的采集,如温度、光强、烟雾及图像信息[6],通过ESP32内置的蓝牙和WIFI完成信息的无线传输。利用超声模块实现智能车的测距与自动避障功能,采用SU-03T语音识别模块实现了智能车的人车交互与控制功能。通过实际测试,验证了系统的功能与可行性。
1 设计方案
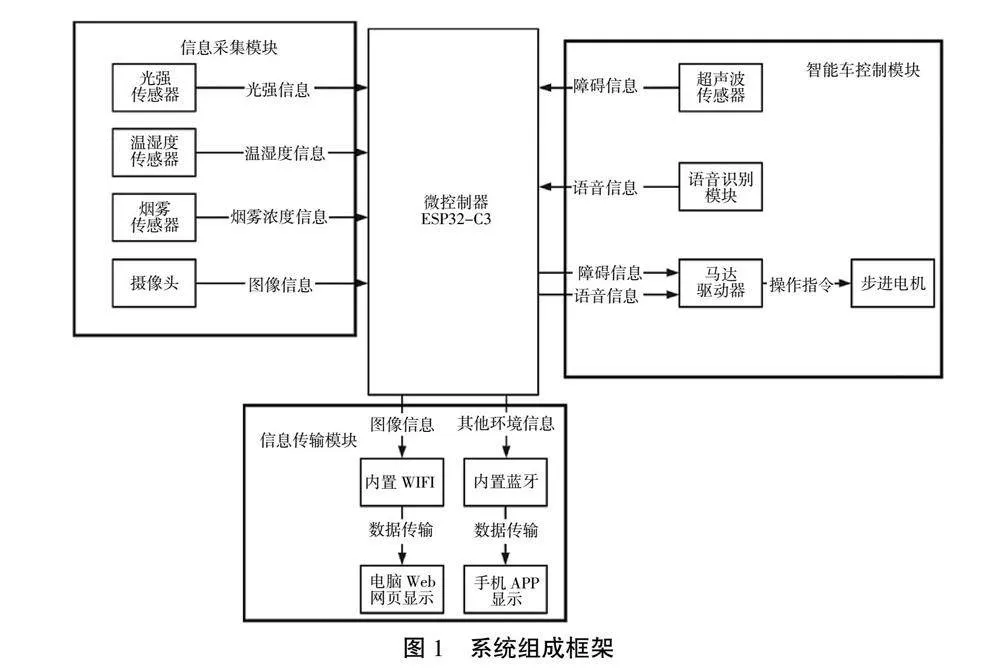
信息采集智能车系统要兼具环境信息采集与数据传输功能以及行驶中的自动避障和控制功能。基于该需求,本文采用ESP32-C3微处理器作为主控单元,在智能车控制模块基础上搭载信息采集模块与信息传输模块,实现了信息采集智能车系统,系统总体组成框架如图1所示。
在信息采集模块中,使用多传感器采集环境光强、温湿度、烟雾及图像信息,通过ESP32无线传输功能,将环境信息发送至远程端。在信息采集智能车控制模块中,利用超声波传感器使智能车具备自动避障功能,同时通过语音识别模块实现了智能车运行的语音控制。
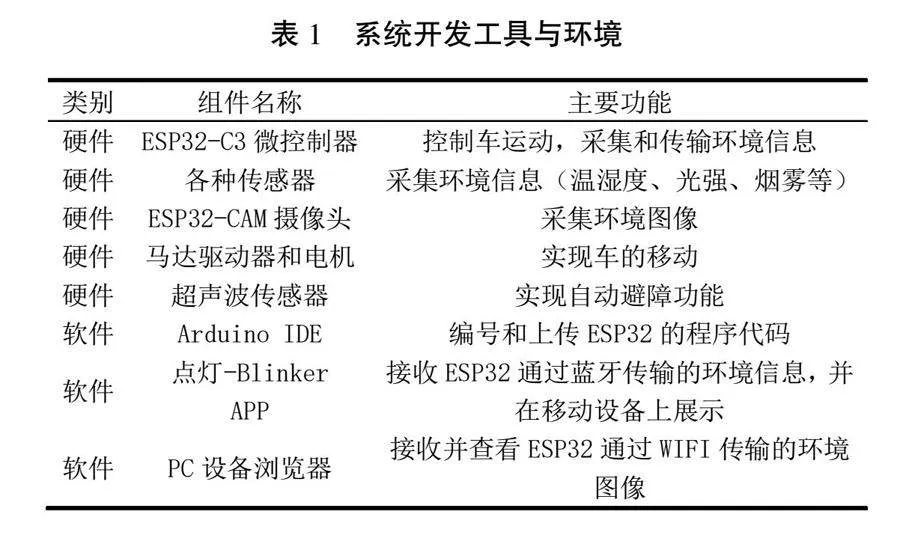
本系统采用的具体开发工具和开发环境见表1。
2 功能实现
信息采集智能车系统主要包括环境信息采集与传输以及智能车驱动与控制两大模块。
2.1 环境信息采集与传输功能的实现
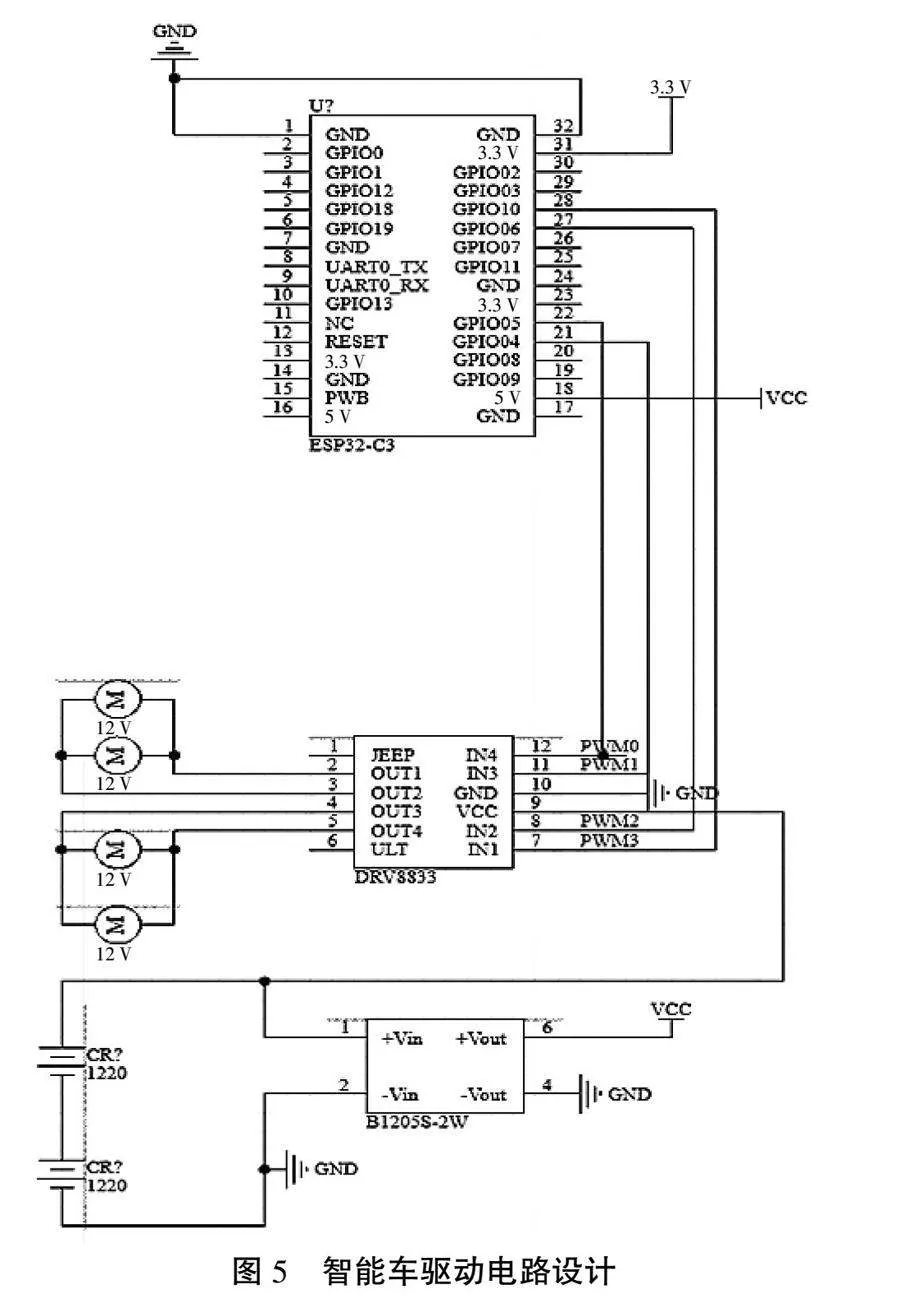
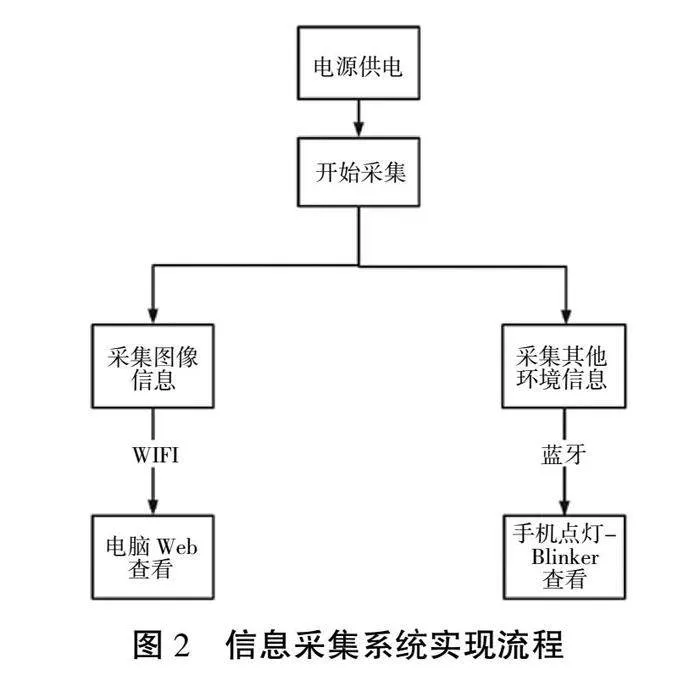
本文采用多传感器实现了温湿度信息、光强信息、烟雾信息及图像信息的采集,其中温湿度、光强及烟雾信息通过蓝牙发送给手机端,图像信息通过ESP32的WIFI功能发送至PC端,具体实现流程如图2所示。
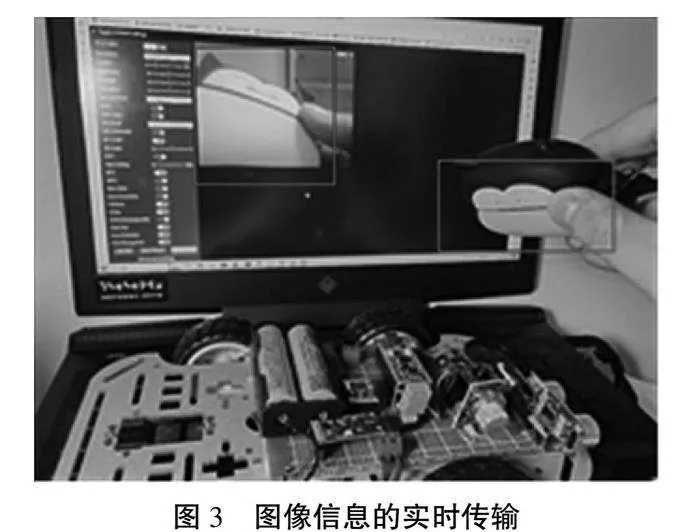
在图像采集方面,本文采用了ESP32-CAM模块,通过其内置摄像头实现图像信息的实时采集。ESP32具有内置WIFI功能,可将采集到的图像数据通过无线网络发送到电脑端。用户可以在电脑端的Web页面查看实时图像,从而实现图像信息的实时监控,如图3所示。
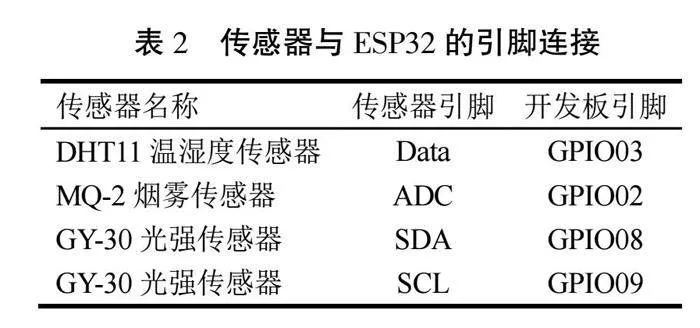
为实现环境信息采集与传输,本文选用了DHT11温湿度传感器、GY-30光强传感器和MQ-2烟雾传感器实现环境温湿度信息、光强信息及烟雾信息的采集。将各传感器数据端连接到ESP32-C3开发板数据接口,以实现环境数据的采集,具体引脚连接见表2。
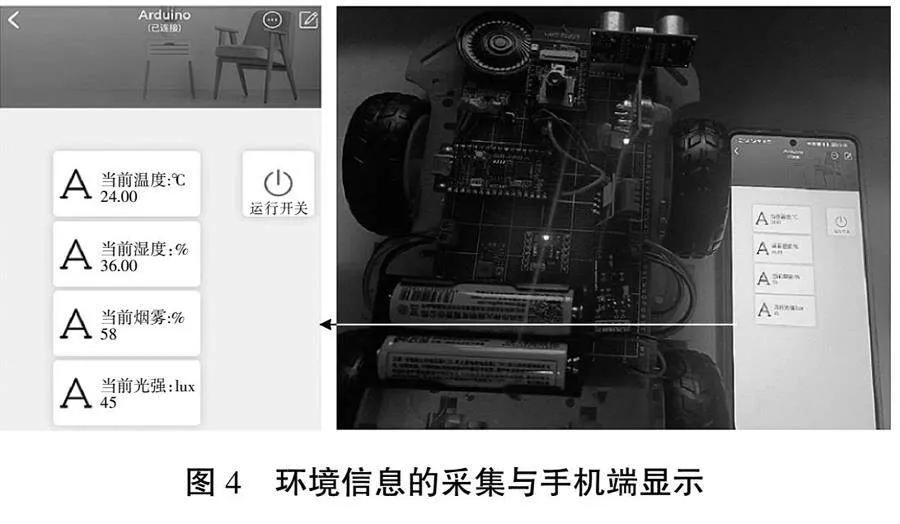
通过ESP32内置的蓝牙功能实现采集到的数据的无线传输,以方便在移动设备端进行实时在线监控。在数据的传输和接收过程中,ESP32的蓝牙模块和移动设备的蓝牙接口协同工作,确保了数据传输的准确性和实时性[7]。本文基于Blinker移动应用平台,设计开发了数据显示应用界面。Blinker是一个专门为物联网设备提供数据展示和控制功能的平台,用户可以通过其图形化界面方便地查看和管理各种设备的状态和数据。本文利用了Blinker平台实现了将传感器采集的信息实时显示在移动设备终端,如图4所示。
2.2 智能车控制功能的实现
为实现智能车的可靠运行,本文首先设计了智能车驱动系统。智能车的驱动系统主要由3个核心部件组成,即电机、电源模块和马达驱动器。由于步进电机可以提供精确的位置控制和速度控制,具有将输入的电信号转换为特定数量的转子旋转角度的功能[8],因此本系统采用步进电机,结合高性能的隔离式DC-DC 电源模块B1205S-2W以及DRV8833马达驱动器实现了智能车驱动系统,其电路设计如图5所示。
为实现对智能车运行安全有效的控制,本文采用语音控制技术和自动避障技术,完成了对信息采集车行驶方向与自动运行的智能化控制。
在智能车启动后,用户可通过语音控制智能车运动,如遇到障碍则会在碰撞前自动停止,具体实现流程如图6所示。
在智能车的语音控制和自动避障2种控制方案中,自动避障的优先级高于语音控制。
本系统采用HC-SR04超声波测距模块实现智能车的自动避障功能。当HC-SR04检测到智能车与障碍物的距离小于12 cm时,该信息将被传输至ESP32主控系统。主控系统在接收到这一信息后,会立即对智能车的运行进行分析和处理,通过DRV8833马达驱动器操纵步进电机停止运行,以防止智能车与障碍物发生碰撞。同时,ESP32主控系统还可能根据周围环境的变化,实时调整智能车的运行方向和速度,从而实现自动避障功能。
图5 智能车驱动电路设计
在语音指令识别模块中,本文采用SU-03T语音识别模块将语音指令解析为可执行命令,传输到ESP32主控芯片进行处理。主控芯片计算出相应的PWM(脉冲宽度调制)信号,控制马达转速实现多样化驱动行为。
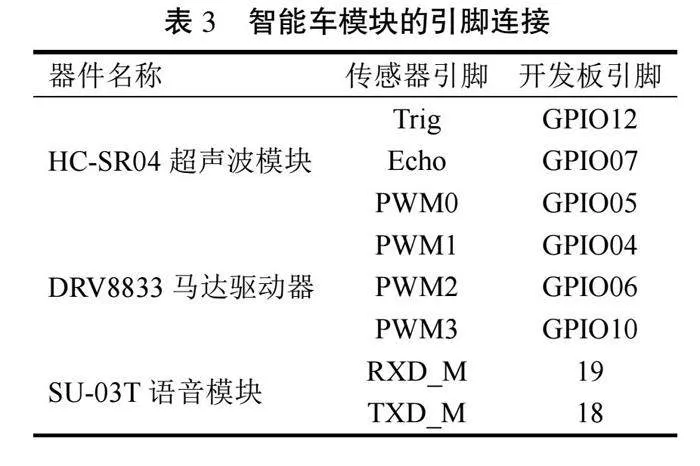
每个功能模块通过特定的引脚连接到ESP32-C3,使微控制器能够与各模块进行通信和控制,具体引脚连接见表3。
通过正确连接功能模块到ESP32-C3引脚,该系统可以高效地管理和控制各个模块,实现系统智能控制的功能。
3 结论
本文基于ESP32设计和开发了具有信息采集功能的智能车系统。在信息采集模块中,采用DHT11温湿度传感器、GY-30光强传感器、MQ-2烟雾传感器及ESP32-CAM实现了环境温湿度信息、光强信息、烟雾信息和实时视频数据的采集。基于Blinker移动应用平台,实现了环境信息数据的实时显示。通过ESP32的WIFI功能完成了视频数据的无线传输与电脑端的实时监控。在智能车控制模块,结合HC-SR04超声波测距模块、SU-03T语音识别模块及DRV8833马达驱动器实现了智能车的语音控制与自动避障功能,确保智能车能够按指令安全运行。通过系统测试,验证了系统功能的稳定性、准确性和可靠性。本系统易于使用和扩展,辅助以其他传感器,可以实现更多环境信息的采集。本文的研究对于恶劣条件下的环境勘探具有使用价值和意义。
参考文献:
[1] 齐心.NB-IoT在故宫应用的可行性分析——智慧博物馆的探索与实践[C]//北京数字科普协会,北京博物馆学会,中国博物馆协会博物馆数字化专业委员会,北京联合大学应用文理学院.2019 北京数字博物馆研讨会论文集.华夏出版社有限公司,2019:7.
[2] LUO J X,YAN B,WOOD K. InnoGPS for Data-Driven exploration of design opportunities and directions: the case of GoogBpOVgHUtxzPFSlc7aqRkqQ==le driverless car project[J]. Journal of Mechanical Design,2017,139(11):111416.
[3] 张溪瑨.商用自动驾驶技术监管问题及对策——以特斯拉为例[J].中国科技论坛,2022(5):167-177.
[4] WO NIAK M, ZIELONKA A, SIKORA A. Driving support by type-2 fuzzy logic control model[Z]. Expert Systems With Applications,2022.
[5] 李泓毅.DN自动驾驶系统公司发展战略研究[D].南宁:广西大学,2022.
[6] SUGRIWAN I,RAMDHANI A S,FAHRUDIN A E,et al. Data acquisition system in measuring carbon dioxide, humidity and temperature: design and fabrication[J]. IOP Conference Series: Earth and Environmental Science,2021,758(1):012015.
[7] 唐天晓.激光导航自动导引小车控制系统研制[D]淮南:安徽理工大学,2018.
[8] 杜通波.IDC三相负荷平衡控制策略与柔性切换研究[D].杭州:中国计量学院,2013.