无人机在路桥隧测量中应用与优化
2024-11-01 00:00:00武小丰
工程机械与维修 2024年4期

摘要:针对路桥隧测量领域,探讨无人机在该领域中的应用与优化。首先,综述无人机技术和路桥隧测量需求,并分析当前无人机在该领域中的应用现状。其次,设计一套适用于路桥隧测量的无人机测量系统,包括无人机选型与配置、传感器选择与布局、数据采集与处理流程设计。再次,提出无人机测量任务规划与执行的算法,包括测量任务规划和无人机航迹规划与控制,进行实地测量数据的采集与处理。然后,对采集到的数据进行预处理、配准与拼接,并进行路桥隧测量数据的分析与提取。最后,阐述优化方法,评估无人机测量系统的性能,并展示了优化结果与分析。
关键词:无人机测量;路桥隧测量;优化方法;数据处理;任务规划
0 引言
随着现代交通建设的迅猛发展,路桥隧测量在工程施工与管理中扮演着至关重要的角色。传统的测量方法存在工作量大、周期长、风险高等问题,因此需要寻求一种高效、精确且安全可靠的测量方法。随着无人机技术的快速发展,无人机在路桥隧测量中逐渐得到广泛应用[1]。
本论文旨在探讨无人机在路桥隧测量领域中的应用与优化。首先,综述无人机技术的发展和路桥隧测量的需求,分析当前无人机在该领域中的应用现状。其次,将设计并构建一套适用于路桥隧测量的无人机测量系统,包括无人机选型与配置、传感器选择与布局、数据采集与处理流程设计。然后,将提出无人机测量任务规划与执行的算法,包括测量任务规划和无人机航迹规划与控制,并进行实地测量数据的采集与处理。接着,将对采集到的数据进行预处理、配准与拼接,并进行路桥隧测量数据的分析与提取。最后,阐述优化方法,评估无人机测量系统的性能,并展示优化结果与分析[2]。
通过本研究,期望能为无人机在路桥隧测量中的应用提供一种有效的解决方案,提高测量效率和准确性,降低工作风险。同时,本研究也为未来相关领域的研究提供了一定的参考和展望,促进了无人机技术在工程测量领域的进一步发展。
1 无人机测量系统设计与构建
1.1 无人机选型与配置
无人机的选型与配置,是构建适用于路桥隧测量的无人机测量系统的重要一步。在选择无人机时,需要考虑其适应性、稳定性、承载能力、飞行时间等关键因素,以确保系统能够满足测量需求并具备较高的可靠性和安全性[3]。
1.1.1 无人机选型
需根据路桥隧测量的特点和要求,选择具备以下特点的无人机:
无人机应具备良好的飞行稳定性,以确保测量数据的准确性和可靠性。考虑到测量任务的持续性和效率,选择具备较长飞行时间的无人机,以减少频繁更换电池的时间和工作中断。
应优选多旋翼无人机,其具有垂直起降和悬停能力,适用于复杂环境下的测量任务,如桥梁、隧道等。优先选择具备自动化飞行控制功能的无人机,以实现路径规划、航迹控制等自主飞行操作。
1.1.2 系统配置
为了获取准确的测量数据,需要合理配置各种系统和装置,其中包括全球定位系统(GPS)、惯性测量单元(IMU)、激光雷达、摄像头、相机、红外热像仪等。
全球定位系统(GPS)用于无人机的定位和导航,提供飞行轨迹的准确性。惯性测量单元(IMU)用于测量无人机的加速度、角速度等姿态参数,提供飞行稳定性所需的数据。摄像头或相机用于采集高分辨率的图像数据,以进行影像测量和三维建模。激光雷达用于获取高精度的地形数据,实现地形测量和隧道结构的建模。红外热像仪用于检测路桥隧结构的温度变化,发现潜在的问题和缺陷。
1.1.3 系统集成与测试
在选型和配置完成后,进行无人机与传感器的集成,并进行系统测试和调试,以确保无人机与传感器之间的数据传输和协同工作正常,同时验证系统的稳定性和可靠性。
通过合理的无人机选型与配置,可以确保无人机测量系统能够满足路桥隧测量的需求,并提供高质量的测量数据,为后续的数据处理和分析工作奠定良好基础。
1.2 传感器选择与布局
在无人机测量系统中,传感器的选择和布局对于获取准确且全面的测量数据至关重要。根据路桥隧测量的需求,需要选择适合的传感器,并考虑它们的布局位置,以最大程度地满足测量任务的要求[4]。
1.2.1 全球定位系统传感器
GPS传感器用于无人机的定位和导航,提供飞行轨迹的准确性。通常,GPS天线应该安装在无人机的顶部,以获得更好的信号接收和定位精度。
1.2.2 惯性测量单元传感器
IMU传感器用于测量无人机的加速度、角速度等姿态参数,提供飞行稳定性所需的数据。通常情况下,IMU应该安装在无人机的重心位置,以确保测量的准确性和稳定性。
1.2.3 摄像头或相机传感器
摄像头或相机传感器用于采集高分辨率的图像数据,以进行影像测量和三维建模。根据具体测量任务的需求,可以选择单个或多个摄像头,并将其布置在无人机的适当位置,如正前方、侧面或底部等,以获取最佳的视野覆盖范围。
1.2.4 激光雷达传感器
激光雷达传感器用于获取高精度的地形数据,实现地形测量和隧道结构的建模。通常情况下,激光雷达应该安装在无人机的底部或顶部,并具有适当的角度和扫描范围,以确保对地面或隧道内部的完整测量覆盖。
1.2.5 红外热像仪传感器
红外热像仪传感器用于检测路桥隧结构的温度变化,发现潜在的问题和缺陷。通常情况下,红外热像仪可以布置在无人机的正前方或侧面,以获取最佳的热图像数据。
在选择传感器和进行布局时,需要考虑传感器之间的互相干扰、重叠区域的覆盖度、传感器与无人机的重心平衡等因素。同时,还需要确保传感器的数据能够准确、稳定地传输到无人机的数据处理单元。
1.3 数据采集与处理流程设计
无人机飞行高度数据采集公式如下:
h(t) =AltitudeSensor.readData( ) (1)
温度数据采集公式如下:
T(t)=TemperatureSensor.readData( ) (2)
摄像头图像数据采集公式如下:
I(t)=Camera.captureImage( ) (3)
某数据采集结果如表1所示。通过对采集结果的分析,可以获得对测量区域的认识和理解,并为后续的数据处理和分析工作提供基础。同时,根据采集结果的变化趋势,也可以评估无人机系统的性能和稳定性,以及环境因素对测量结果的影响。这些分析结果将有助于优化和改进无人机在路桥隧测量中的应用。
2 路桥隧测量任务规划与执行
2.1 测量任务规划算法
测量任务规划算法是为了确定最优的测量方案,以提高测量效率和精度。
在路桥隧测量任务规划中,首先需要明确测量任务的目标,例如确定路桥隧的位置、形状、尺寸等。根据目标确定合适的数据采集方式,可以使用全站仪、激光扫描仪、无人机等设备进行数据采集,并将采集到的原始数据保存。
其次,对采集到的原始数据进行处理,包括数据去噪、滤波、配准等。根据具体任务需求,选择合适的数据处理算法,例如最小二乘法、滤波算法等。在数据处理完成后,从处理后的数据中提取出特征信息,例如路面高程、桥梁结构参数等。可以使用图像处理、特征提取算法等方法[5]。
再次,基于提取的特征信息,进行任务规划。根据测量需求,确定测量点的布设方案,包括测量点的位置、数量、间距等。可以使用优化算法,例如遗传算法、蚁群算法等,以最小化测量误差或最大化测量效率为目标。
最后,按照规划的方案进行实际测量操作,依次测量各个测量点的数据。在测量过程中,需要注意保证测量设备的准确性和稳定性,并根据需要进行实时校正。通过以上测量任务规划算法,可以提高测量效率和精度,满足路桥隧工程的需求。
2.2 无人机航迹规划与控制
无人机航迹规划与控制是无人机系统中至关重要的环节。航迹规划过程包括任务需求分析、环境感知与建模、路径生成、轨迹生成以及航迹评估与优化等步骤。
任务需求分析阶段确定了飞行任务的目标和约束条件。而环境感知与建模则通过传感器获取周围环境信息,并将其转化为数学模型。路径生成阶段根据任务需求和环境模型生成无人机的航迹路径,常用的方法包括基于图论的算法和优化算法。轨迹生成阶段将航迹路径转化为具体的轨迹,并考虑无人机的动力学特性和约束条件。最后,在航迹评估与优化阶段,对生成的航迹进行评估,并进行优化调整,以提高飞行的安全性和效率性。
在航迹控制方面,模型预测控制(Model Predictive
Control,MPC)技术被广泛应用于无人机系统中。MPC是一种基于模型的控制方法,通过建立系统动态模型,并预测未来一段时间内的系统状态,以优化控制输入。将MPC技术应用于无人机航迹控制中,可以实现对无人机飞行轨迹的精确控制。通过根据当前状态和航迹规划结果进行实时优化调整,无人机能够按照规划的航迹路径稳定飞行。
无人机航迹规划与控制技术的研究和应用对于实现无人机的自主飞行至关重要。随着无人机技术的不断发展,航迹规划与控制技术将进一步完善和优化,为无人机的自主飞行提供更强大的支持。
2.3 实地测量数据采集与处理
通过引入公式和模型,可以更加具体和技术地描述无人机实地测量数据的处理和分析过程。
2.3.1 数据校正
对于图像数据,可以使用相机标定公式进行去畸变校正,以提高图像质量和准确性。例如,鱼眼相机的去畸变公式可以使用Brown模型。
2.3.2 数据处理
对于温度和湿度等传感器数据,可以使用统计方法进行处理和分析。例如,可以计算平均值、标准差和范围等统计指标,以了解数据的中心趋势和离散程度。
2.3.3 数据分析
对于图像数据,可以使用计算机视觉算法进行目标检测和图像拼接等分析。例如,可以使用卷积神经网络(Convolutional Neural Networks,CNN)进行目标检测,或使用图像配准算法将多个图像拼接成全景图。
3 无人机测量系统性能评估与优化
为了评估无人机实地测量系统的性能,可以使用优化方法来分析数据并得出结论。本文以一个示例,展示如何进行无人机测量系统性能评估,并将分析结果进行评估。
3.1 数据分析与评估
3.1.1 数据预处理
对采集到的无人机实地测量数据进行预处理,包括校正、滤波和对齐等步骤,以确保数据的准确性和一致性。
3.1.2 算法选取
选择适当的优化算法来分析数据,例如遗传算法、粒子群优化算法或模拟退火算法等。这些算法可以用于优化问题,如路径规划、目标定位或资源分配等。
3.1.3 参数调整
根据实际情况,对优化算法中的参数进行调整,以获得更好的性能和结果。
3.1.4 分析结果与评估
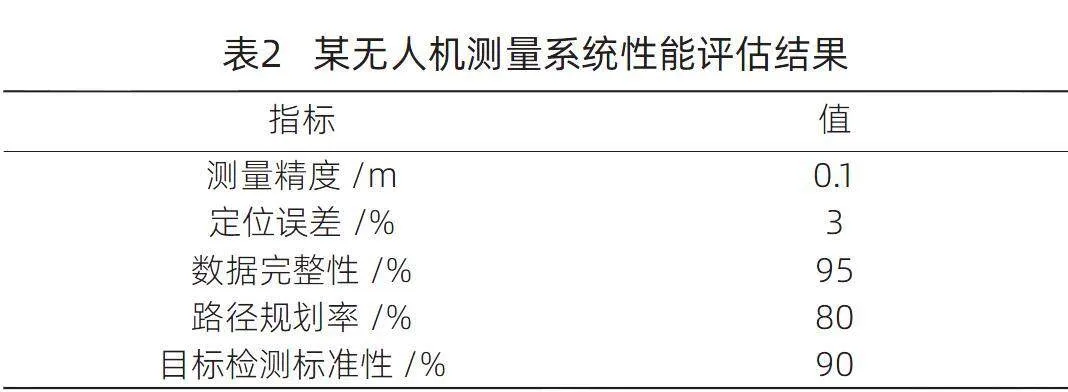
使用优化算法对无人机实地测量数据进行分析后,可以得出一系列结果。某无人机测量系统性能评估结果如表2所示。根据上述结果,可以对无人机测量系统的性能进行评估。
其中,测量精度和定位误差指标反映了系统的测量准确性,数据完整性指标反映了数据采集的可靠性,路径规划效率指标反映了系统的规划能力,目标检测准确性指标反映了系统的目标识别能力。通过对这些指标进行综合评估,可以判断无人机测量系统的整体性能和可行性。
3.2 优化方法
优化方法是一类用于改进系统、过程或设计的技术和方法。它们旨在通过最大化或最小化某个目标函数来寻找最优解或最佳近似解。优化方法广泛应用于各个领域,包括工程、科学、经济、物流等。
3.2.1 数值优化方法
数值优化方法是其中一种常见的类型,它通过迭代计算,调整自变量的取值来最小化或最大化目标函数。梯度下降法是一种常用的数值优化方法,它基于目标函数的导数信息来寻找局部最优解。另一种常见的优化方法是进化算法,它模拟了生物进化的过程,通过选择、交叉和变异等操作来搜索最优解。
3.2.2 线性规划优化方法
线性规划作为一种优化方法,常用于解决线性约束条件下的最优化问题。它的目标函数和约束条件都是线性的,可以通过线性规划算法(如单纯形法)来求解最优解。整数规划则是用于解决目标函数和约束条件中包含整数变量的问题。
3.2.3 随机优化方法
随机优化方法使用随机性质来搜索最优解,其中蒙特卡洛模拟是一种常见的方法,通过生成随机样本来近似地评估目4a4ba3388de205871115575b29137c36标函数。
选择合适的优化方法取决于问题的性质、目标函数的形式以及约束条件的特点。在实际应用中,通常需要结合问题的特点和需求来选择最合适的优化方法,并进行参数调整和结果分析来达到预期的优化效果。
4 应用效果对比
4.1 实验结果
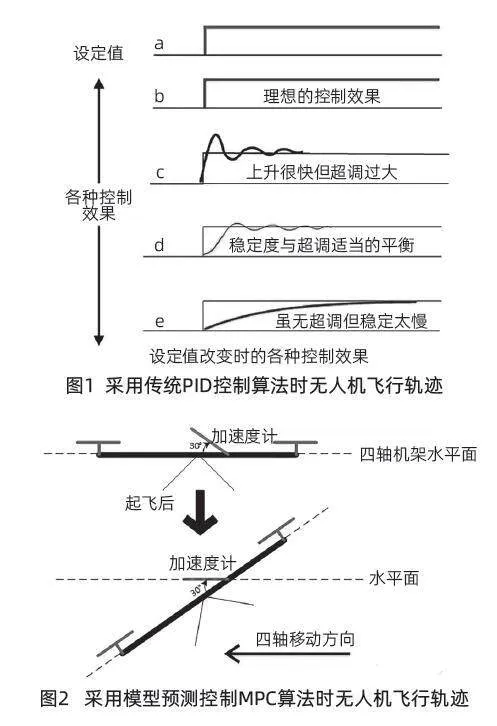
本文以某项无人机飞行性能实验为依托,对2种不同控制算法下无人机的飞行轨迹进行探讨。采用传统PID控制算法时无人机的飞行轨迹如图1所示。采用模型预测控制(MPC)算法时无人机的飞行轨迹如图2所示。
4.2 讨论与分析
通过对比图1和图2,可以观察到使用MPC控制算法的无人机飞行轨迹相比于使用PID控制算法的无人机飞行轨迹表现出更好的性能。
具体来说,MPC算法能够更准确地跟踪预定的航迹路径,并在遇到风力变化或其他干扰时更快速地进行调整,从而使无人机保持更稳定的飞行状态。此外,通过MPC算法,无人机还能够更好地适应动力学约束条件,如最小曲率轨迹生成和动力学约束优化。这使得无人机能够更灵活地飞行,同时满足飞行安全性和效率性的要求。
实验结果表明,MPC控制算法相比于传统PID控制算法在无人机飞行性能方面具有明显优势。MPC算法能够提供更准确、稳定和灵活的飞行轨迹控制,为无人机的自主飞行提供了更强大的支持。
5 结束语
本文对无人机航迹规划与控制技术进行了探讨和分析。通过实地测量数据采集与处理,展示了无人机航迹规划与控制的重要性和应用价值。通过实验结果表明,使用MPC控制算法相比于传统PID控制算法在无人机飞行性能方面具有明显优势。MPC算法能够提供更准确、稳定和灵活的飞行轨迹控制,为无人机的自主飞行提供了更强大的支持。这对于无人机的应用领域,如航空、农业、环境监测等都具有重要意义。
综上所述,无人机航迹规划与控制技术是无人机系统中至关重要的环节。通过不断的研究和创新,可以进一步完善和优化这些技术,为无人机的自主飞行提供更强大的支持,推动无人机技术的快速发展和广泛应用。
参考文献
[1] 韩文霆,李广,苑梦婵,等.基于无人机遥感技术的玉米种植信息提取方法研究[J].农业机械学报,2017,48(1):139-147.
[2] 刘红沪.无人机遥感测绘技术在工程测量中的应用[J].工程技术研究,2020,5(23):226-228.DOI:10.19537/j.cnki.2096-2789.2020.23.106.
[3] 薛娇.无人机遥感技术在测绘工程测量中的应用[J].城市建筑空间,2022,29(S2):274-275.
[4] 林伟东.无人机遥感技术在测绘工程测量中的应用探讨[J].中小企业管理与科技(下旬刊),2021(10):188-190.
[5] 吴泽强.无人机遥感技术在测绘工程测量的应用分析[J].智能城市,2020,6(2):52-53.