三维激光扫描技术在建筑施工检测中的应用
2024-11-01 00:00:00李飞
工程机械与维修 2024年4期



摘要:在房屋建筑作业中,对建筑的过程检测是确保工程质量的重要手段。但目前传统检测手段存在工作方法复杂、工作量大、手段单一、效率低等缺点,针对这种问题,构建基于三维激光扫描技术进行建筑施工质量检测的方法。以容西片区G单元安置房及配套设施项目为研究对象,基于三维激光扫描技术对施工的质量的进行检测,并与传统方法进行了对比分析。分析结果表明,基于三维激光扫描技术的检测方法结果更加准确直观且效率高,可以在以后的建筑施工检测中大力推广。
关键词:三维激光扫描;去噪;检测;垂直度
0 引言
20世纪初,西方国家开始对三维激光扫描技术进行应用研究,这个过程中不断完善三维激光扫描技术的理论和技术,仪器也不断得到更新换代[1-2]。我国的三维激光扫描技术应用起步比较晚,近年来随着我国科学技术不断进步,该技术应用也越来越广泛[3]。
在传统的建筑工程检测中,为了保证作业的精度,需要采取很多传统的设备如水准仪、全站仪,对建筑过程进行检测,该方式不但费时费力,对数据的处理也因为模型选择不同而产生很大误差[4]。三维激光扫描技术设备不但小巧灵便,操作不受地形地貌限制以及时空限制,数据处理结果还具有精度高、直观性强等优点。
本文以河北省雄安新区容西片区G单元安置房及配套设施项目为研究对象,借助于三维激光扫描技术,对该工程的建筑施工进行检测,并将其与传统检测方法的检测结果进行对比分析。通过分析表明,三维激光扫描技术能高效精确的完成建筑施工检测工作,并可以通过数据反馈为建筑施工提供参考,对提高建筑施工质量具有重要的现实意义。
1 三维激光扫描的检测技术概述
1.1 三维激光扫描技术发展历程
三维激光扫描技术又称“实景复制技术”,它通过非接触式高速激光扫描测量,以阵列式点云的形式,获取地形或复杂物体表面的三维空间数据,是又一次测量领域的革命[7-8]。三维激光扫描技术兴起于20世纪80年代,随着信息技术和智能化技术的发展,在20世纪90年代得到大范围的推广,是继3s技术之后,测绘技术的又一大进步。
1.2 三维激光扫描技术特点
三维激光扫描技术不需要接触被测目标,即可快速得到目标的三维信息,解决了危险目标、不宜接触目标、易损坏目标的测量。激光扫描的方式能够快速获取大面积的空间信息,从传统的单点测量的方式跨越到面测量,实现测量效率的质的飞跃。
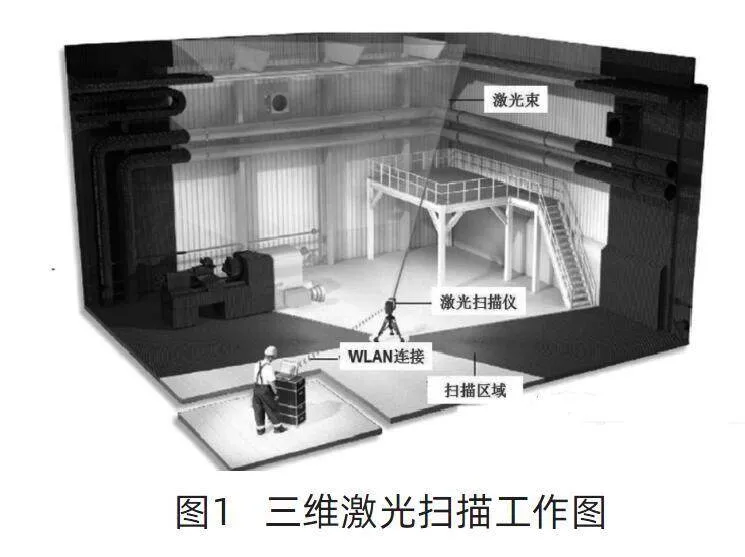
三维激光扫描技术在具体测量过程中,可根据实际需求,被测物体的精细程度设定一定的采样间隔,从而得密度足够高的点云数据。三维激光扫描仪得到的点云数据,不仅包含了三维位置信息,也包含了RGB信息,便于移植到其他系统处理和使用。三维激光扫描仪通过主动发射激光束的方式来完成对目标点的测量,不需要外部光线,使得扫描能够摆脱时间和空间的限制,真正实现了全天候测量。三维激光扫描工作如图1所示。
2 工程概况
河北省雄安新区容西片区G单元安置房及配套设施项目,位于河北省容城县,北至津保大街,西至慧谷路,南至云溪河,东至智源路。地上包含48栋住宅楼、6栋配建楼、2栋开闭站。总建筑面积约45万m2,其中地上建筑面积约29万m2,地下建筑面积约16万m2,本工程安置住房总户数2649户。住宅为钢筋混凝土剪力墙结构,配建及开闭站为钢筋混凝土框架结构,地下车库为钢筋混凝土框架结构。
利用三维激光扫描技术进行检测,通过对多楼层区域集中问题数量进行统计以及趋势分析,可直观统计工艺手法、施工质量的集中爆发区域,基于大数据实时分析整栋楼,乃至整个分期建设楼栋的实测点位[5-6]。其可对待建楼层、项目的工艺手法改进、质量控制起到了良好的预警作用,有助于提升待建楼栋的整体质量,同时对参建方评价起到了辅助决策的作用。结合完成面爆点的统计分析,有助于将过程实测中的多次整改减少为一次整改,实现验收既交付,从而大幅降低整改成本。
3 三维激光扫描技术应用要点
3.1 三维激光扫描技术点云数据采集
3.1.1 现场勘察
先对项目现场的建筑进行实地踏勘,然后根据现场的实际情况对数据进行采集。根据三维激光扫描技术应用情况的分析可知,对容西片区G单元安置房房屋建筑现场进行数据采集是可行的。
3.1.2 测站设置
根据建筑物的实际情况,每个房建设置测站2个,每层共设计测站14个。为了避免大量数据的分析,本次研究以单层数据进行采集分析。为了减少后期数据处理的工作量,对于测站的选择应该尽量合理,既不影响数据采集的质量,又不会增加工作量,以减少因后期采集数据量过大而造成的数据处理误差。鉴于建筑物的区域比较大,且单独的建筑物是封闭的,三维激光扫描仪不能同过一个位置完成所有数据的采集,所以需要根据平面范围内数据采集的需要,设置不同的测站。
3.1.3 扫描仪架设
每个楼层楼面已经经过浇筑处理,整个地面平整度比较高,这对于三维激光扫描仪机器来说架设比较方便。三维激光扫描仪的架设,需要保证在测点扫描范围之内可以扫描到全部区域。
3.1.4 标靶球设置
在对现场进行数据采集过程中,为了保证在不同站点采取到的数据可以实现快速拼接,不仅需要在测站对三维激光扫描仪进行架设,同时需要在架设过程中进行标靶球的设置。借助于标球靶的定位,可以让采集的数据在处理过程中实现快速拼接,减少数据拼接所浪费的时间,从而使拼接精确度大大提高,拼接效率大大提升。
本次测量选用标球靶的数量为10个,每个测点中必须有不少于3个标球靶和下一个测站相互重合。在第一个测站的测量任务完成后,需要将第一个测站与前一个测站的标球靶位置进行重新的定位,然后才能进行下一步的测量任务。
为了保证数据采集的精度,在进行作业时,应该确保标球靶不受到影响。在标球靶布置上,要保证其具有一定的高度差。同时根据三维激光扫描仪参数的不同,保证标球靶在可以扫描的精度范围之内。本次在建筑施工现场选择1/4的分辨率。为了保证精度,按照标球靶的大小(145mm)计算,三维激光扫描仪和标球靶之间的距离不能大于18m。
3.2 三维激光扫描技术点云数据处理
3.2.1 数据处理要点
通过现场测站扫描得到数据后,需要借助于相应的数据处理软件,对三维激光扫描数据进行处理。当全部的数据采集工作完成,下一步就是开始数据的处理工作。在对每个测站的数据进行处理时,先将采集的点云数据放入到软件之中,利用标球靶对数据进行拼接。然后根据对标球靶的命名,将数据进行分类,根据先后顺序进行拼接。
3.2.2 标球靶次序识别
在进行点云数据拼接处理时,需要先对测站进行选择,并根据测站的位置,对标球靶的次序进行识别。在识别完成后,对不同的标球靶进行编码,以方便后续的点云数据处理。根据上文可知,每个测站标球靶的数量为3个。在完成识别工作之后,就可以进行下一步的匹配工作。在完成每个标球靶的匹配工作完成后,即可对每个测站进行匹配。拼接后全局灰度点云如图2所示。
3.2.3 数据去噪
一般情况下匹配完成的数据会存在噪声点,如因材料搬运,施工人员的正常作业带来的噪声。为了保证数据的精准性,需要对这些点云数据进行去噪。在软件中,识别噪声区后需对噪声数据进行删除处理,完成去噪处理即可大大提高整体数据的精准性。
3.3 点云数据对垂直度的检测分析
在进行数据分析之前Ec72P1kbEwGTi/pYH1s008+5gAMlgByIhmrP8QIaPOw=,需要根据建筑物的典型特征对点云数据进行提取。借助于Geomagic Control对采集后拼接完成的点云数据,与对比模型进行检测比较,然后把拼接完成的点云数据以及对比模型,通过Geomagic Control进行处理分析。通过Geomagic Control软件,来检验在建筑现场采集到的点云数据精确度是否满足需要。误差在可以允许的范围之内,才能对垂直度进行对比分析。以拼接完成的点云数据为研究对象,以对比模型数据为验证对象。为了获得的数据更加直观易懂,利用点云骨架法法把点云数据和对比模型进行分析处理。
点云骨架法的优点,是可以对每个单独的点云数据进行拟合处理,避免在垂直度计算工程中因为点云密度造成的误差。同时该方法更加直观,对于建筑物垂直度的检测更加方便,对建筑物的变形观测更加灵敏,可以作为建筑施工过程中垂直度的判断和反馈依据。点云骨架法所需要处理的数据量不大,所以运行速度快,本次采用采用SVD法进行垂直度的检测。通过点云数据分析的垂直度如图3所示。
4 与传统方法对比分析
在常规垂直度检测中,一般采用全站仪进行数据测量。但是全站仪的数据会因为测量点选择不同而造成数据变化较大。为分析全站仪测量与三维激光扫描仪测量的准确度,对两个方法的数据进行对比分析。测量参数对比如表1所示。测量效率分析如表2所示。
通过表1分析可知,全站仪在不同的测点进行测量时,因为测站的选择造成的数据变化较大。而利用三维激光扫描进行测量时,不同测点数据基本一致,由此保证了测量数据的精确性,避免了测点位置选择不同造成的测量数据误差。通过分析表2可知,选择三维激光扫描技术进行建筑检测测,所需时间和劳动力更少,数据更加精准,且一次工作的检测全面性更强。
5 结束语
通过在容西片区G单元安置房项目的应用表明,相较于传统方法,三维激光扫描的技术的环境适应性更强,人为因素造成误差更低。利用三维激光扫描技术对建筑施工检测准确更高,效率更高。在后续的建筑施工中,可以选择三维激光扫描技术进行建筑施工检测,这对于提升整体的施工进度,保证施工质量,降低施工成本具有重要的意义。该技术的应用对于建筑施工检测具有参考作用,可以在后续的类似项目建设中大力推广。
参考文献
[1] 吴国强,俞家勇,马巍,等.基于三维激光扫描的施工建筑平整度检测方法[J].激光与光电子学进展:2023.3(16)257-263.
[2] 李根.基于三维激光扫描技术的建筑墙体外表面缺陷无损检测方法[J].计算技术与自动化,2023,42(1):62-66.
[3] 唐寅.基于四足机器人的三维激光扫描技术在既有房屋检测中的应用研究[J].施工技术(中英文),2023,52(3):35-38.
[4] 韦征,周臻,俞旻韬,等.基于三维激光扫描点云整体分析的铁路隧道超欠挖检测方法[J]. 铁道学报,2023,45(1):135-140.
[5] 胡玉祥,赵亚波,张洪德,等.移动三维激光扫描系统在地下隧道工程病害检测中的应用[J].测绘与空间地理信息,2022,45(12):230-232+235.
[6] 杨敏,方林,张俊.三维激光扫描在既有建筑检测中的应用[J].城市建筑空间,2022,29(11):247-248+251.
[7] 杨雪姣,叶华,王章朋,等.三维激光扫描技术的特异性建筑施工检测应用[J].测绘科学,2020,45(10):71-76+91.
[8] 周克勤,吴志群.三维激光扫描技术在特异型建筑构件检测中的应用探讨[J].测绘通报,2011(8):42-44+56.