一种塔机防碰撞系统免调试技术
2024-11-01 00:00:00全廷立任勇郑昌明
工程机械与维修 2024年4期





摘要:传统塔机的防碰撞系统参数设置复杂,易用性差,且控制精度差。提出一种免调试防碰撞系统,通过引入差分精确定位和激光雷达点云数据处理技术,自动识别塔机位置和塔机安装尺寸,达到即插即用,立塔后免调试的目的。同时由于激光雷达的引入,该防碰撞系统的控制精度、控制性能、控制功能均得到大幅度提高。
关键词:塔机;免调试防碰撞;激光雷达;RTK精确定位
基金项目:湖南省科技创新计划项目:10000吨米级超大型塔式起重机及其关键技术研究与示范应用,项目编号:2021GK1060。
1 塔机放碰撞系统概述
塔式起重机(简称塔机)是建筑工地上广泛使用的物料运输机械。由于工地施工情况复杂(图1),在多台塔机作业的工地,可能发生塔机与塔机之间碰撞、塔机与工地建筑物之间碰撞、塔机与树木/架空电线碰撞,以及塔机与工地其他移动施工机械碰撞的风险。
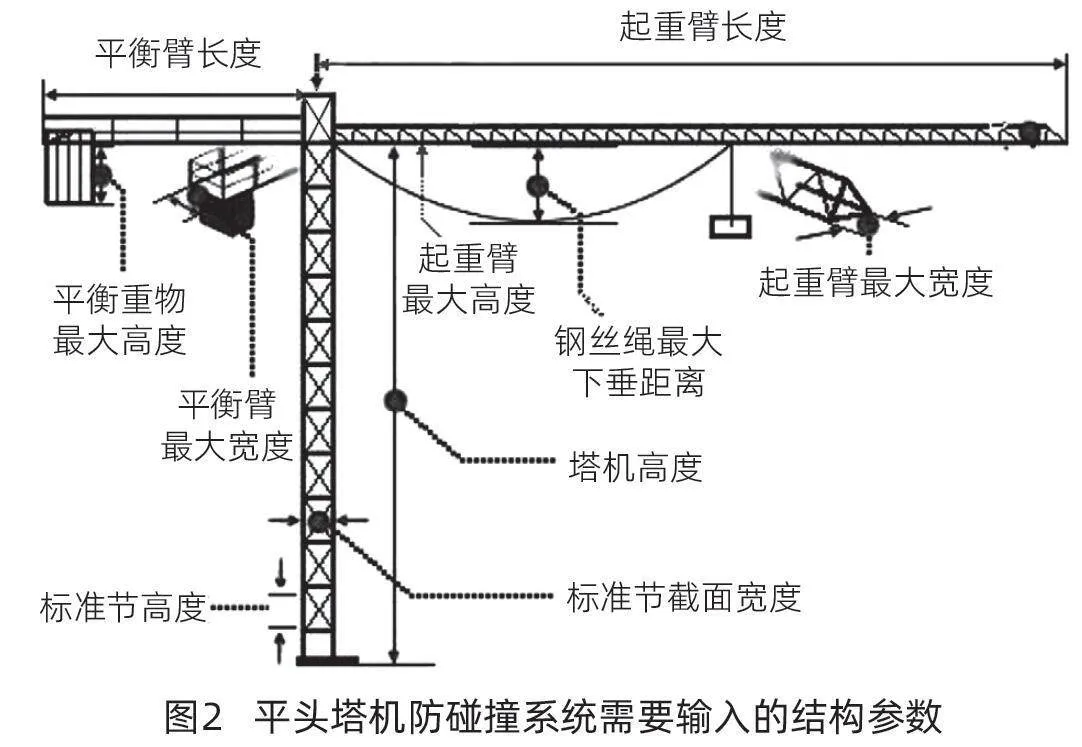
传统塔机防碰撞系统,需要在立塔前配置塔机的各种结构参数;典型的塔机防碰撞系统需要输入下述塔机结构参数才能正常工作,如下图2、图3、图4所示。
单台塔机需要输入的结构参数有十多项,传统塔机防碰撞系统不仅要输入自身的结构参数,还要输入周围干涉塔机的结构参数,假设周边有4台干涉塔机,则合计需要输入约50个参数,这种参数设置的复杂性使得传统防碰撞系统的实用性和可推广性受到限制。
如果同一工地的每台塔机都各自输入自身结构参数,然后通过无线通讯方式把自身结构参数发送给干涉塔机,则每台塔机的防碰撞输入参数就可以简化到十多项,从而大幅度提高防碰撞系统的实用性。中联重科的塔机防碰撞系统目前采用这种方式。
塔机自身结构参数在出厂前已知,出厂前固化到塔机控制器中即可,例如平衡臂宽度、平衡重尺寸、标准节截面尺寸、标准节高度、起重臂宽度/高度等等。但仍然有一些防碰撞系统参数是必须现场立塔后才能确定的,例如钢丝下垂量、立塔基础高度、塔机高度等参数,需要现场测定;塔机坐标也需要查看工地CAD图纸获取,如图5所示,编号1到7的参数都需要工地立塔后才能确定。
而且现有塔机防碰撞系统只根据邻塔坐标和结构尺寸信息进行防碰撞,没有根据邻塔的运行速度、货物尺寸、起重臂实时位置等动态信息进行精确防碰撞预测的能力。
2 技术原理
本文的技术方案通过增加RTK定位和激光雷达扫描来解决上文所述防碰撞系统应用的痛点问题。该方案能够自动测量工地立塔相关结构参数,无需人工测量和输入;能够实现吊钩货物跨越障碍物和低塔运行;能够提高防碰撞系统的预警和停止距离精度;能够实现吊物离地前自动预警减速;能够识别工地上的移动施工机械等等,有着更好的智能化效果。
2.1 塔机自动组网
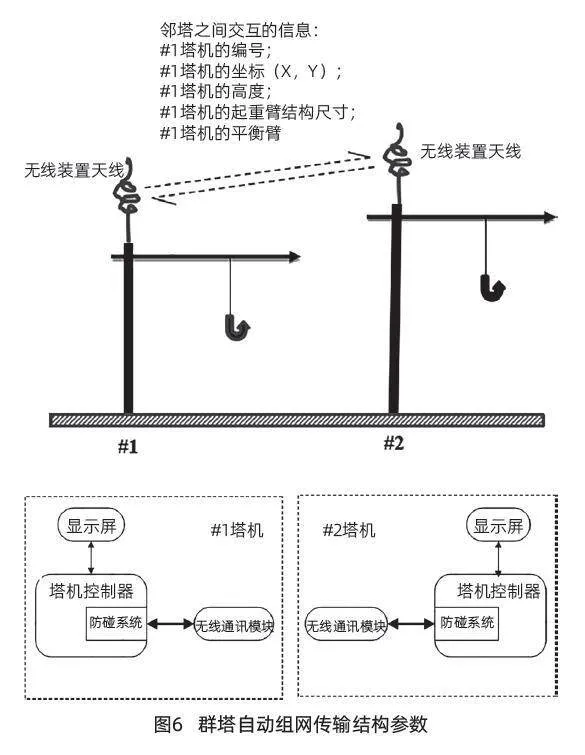
2022年,中联重科通过群塔自组网和云平台管理等数字化技术,把一台塔机的防碰撞系统参数设置由原来需要人工输入50多个参数,简化到只需要人工输入7个参数,极大地提高了群塔防碰撞系统的实用性(图5)。该防碰撞系统的群塔自组网架构如图6所示。
然而2022年开发的群塔防碰撞系统仍然存在如下缺点:①还有7个参数需要人工输入(图6)。②需要使用工地CAD图纸,用“CAD看图王”等软件看图并转换坐标单位。③防碰撞距离识别精度较差,预警和停止点距离真正的碰撞点太远。④无法识别吊钩高度,无法精确跨越障碍物。⑤无法识别货物尺寸,无法精确跨越障碍物。⑥不能识别工地上的移动机械。
2.2 塔机自动定位
本系统通过在控制系统内置RTK定位装置实现塔机自动定位。该定位装置同时存入塔机的编号、位置坐标、结构尺寸、运行位置、运行速度等物理参数,并通过无线通讯装置,把塔机自身编号、位置坐标、结构尺寸、运动速度、运行位置等信息自动传递给相邻塔机,使塔机作业区域被限制在安全区间,避免相互之间发生碰撞。
2.3 立塔尺寸自动识别
本系统通过增加激光雷达,实现立塔尺寸自动识别。在塔机上安装两个激光雷达扫描装置(图7),用于:①获取塔机货物高度。②获取钢丝绳下垂量。③获取起重臂长度。④识别吊钩高度、塔机高度、货物轮廓,提高防碰撞系统控制精度,使防碰撞系统能跨越障碍物运行。⑤检测货物是否即将触地,以便提前预警、自动减速。⑥探测闯入塔机作业区的移动障碍物并避开。
3 实验验证
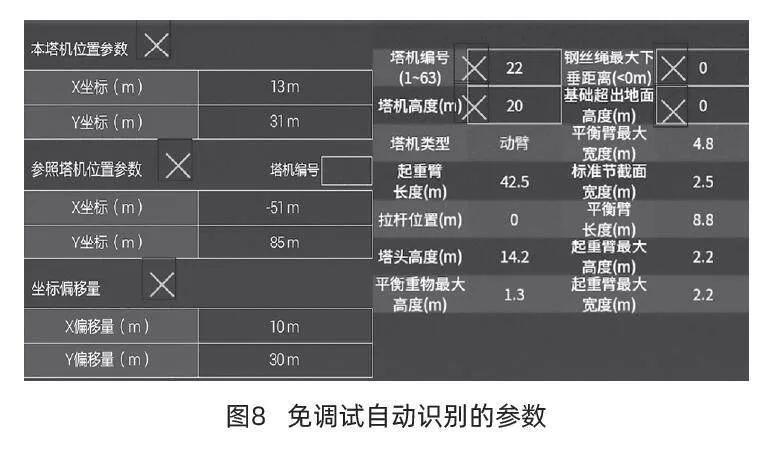
采用本技术方案后,图8中打红色“×”的七个参数将由碰撞系统自动获取,不再需要调试人员手动输入。
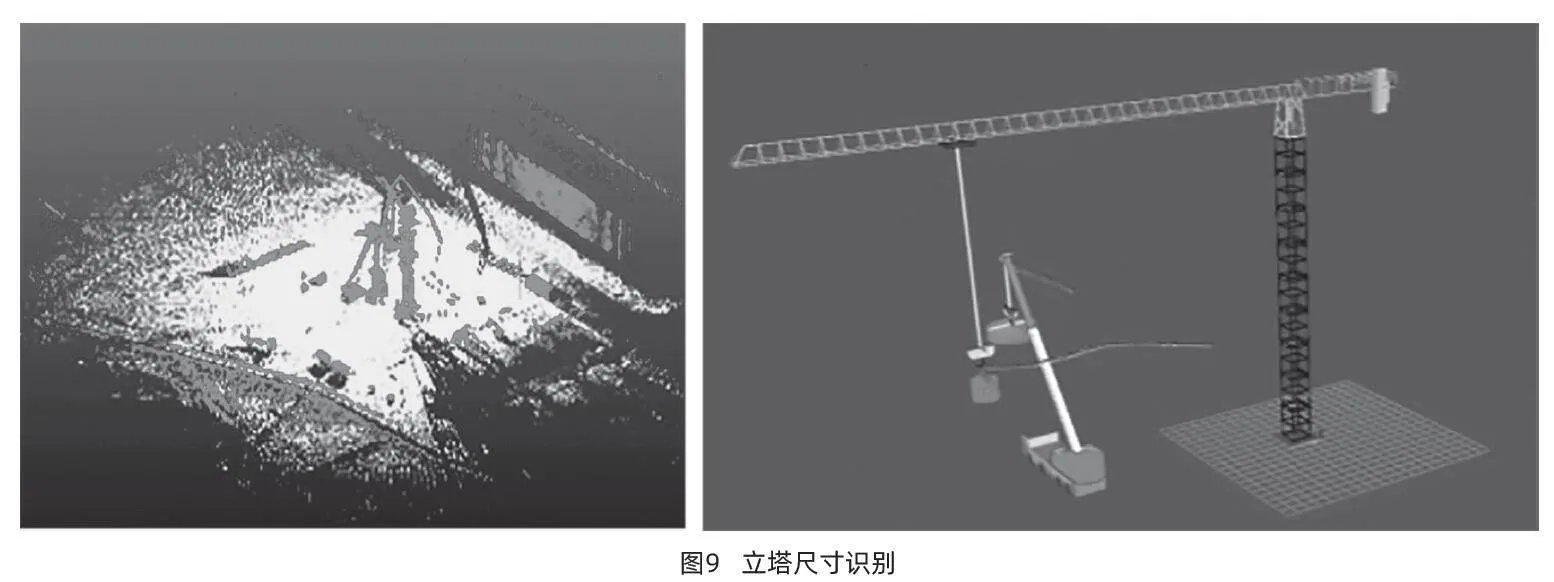
激光雷达扫描的作业环境如图9左图,能够从雷达点云中分割出地面和其他障碍物,识别吊钩、钢丝绳、起重臂、货物等,从而自动计算相关参数。
图9右图显示了塔机根据扫描到的点云,避开了场景中的其他工程机械,实现跨越障碍物运行的情况。
4 结束语
采用本文免调试技术的塔机防碰撞系统,具备下述性能:①塔机识别自身位置坐标,精确到厘米级,相关参数自动识别,无需人工输入。②塔机通过无线通讯,把自身的编号、位置坐标、结构尺寸、运行位置、运行速度等信息广播出去,相邻塔机能彼此获取上述信息,用来相互避让,防止碰撞。③通过激光雷达扫描作业环境,实时获取现场信息,从而跨越障碍物,提高防碰撞精度。
相比当前市场上的防碰撞系统,本技术实现的提高点在易用性和安全性方面包括:①防碰撞系统免调试;②提高防碰撞控制精度,减小避让距离。③跨越障碍物运行。④吊钩触地检测并提前减速。④能够避让工地常规移动机械设备。