基于光流法的流体运动预测技术适用性研究
2024-10-25 00:00:00王浩杨荣菲
机械制造与自动化 2024年5期





摘 要:由于粒子图像测速技术在测量精度和时空分辨率上难以同时保证,而基于光流法的流体运动估计方法可以获得具有较高分辨率的稠密速度矢量场。为了评价该方法在流体运动估计上的适用性,采用流动情况由简单到复杂的开源粒子图像、标量图像、纹影图像序列对3种经典光流算法进行实验,在定性和定量层面评估了各算法的表现。结果表明:传统HS光流算法适用于大部分流动情况,然而在灰度梯度变化不明显时表现不佳;基于随机湍流传输模型的变分光流算法表现更为稳定,在HS目标函数中添加加权非局部平滑项后更适用于捕捉涡轮叶片纹影图像的尾迹区域和估计尾迹涡的输运速度。
关键词:流体运动估计;光流法;涡轮叶栅;纹影;图像处理
中图分类号:TP391.41" 文献标志码:B" 文章编号:1671-5276(2024)05-0155-04
Study on Applicability of Fluid Motion Prediction Technology Based on Optical Flow Method
Abstract:Unlike particle image velocimetry, which has difficulty in guaranteeing both measurement accuracy and spatio-temporal resolution, fluid motion estimation based on optical flow method can obtain dense velocity vector field with high resolution. To evaluate the applicability of this method in fluid motion estimation, three classical optical flow algorithms are tested by using open source particle image, scalar image and schlieren image sequences with flow conditions from simple to complex, and the performance of each algorithm is evaluated in quality and quantity. The results show that the traditional HS optical flow algorithm is suitable for most flow conditions, but performs poorly when the gray gradient changes are not obvious, the variational optical flow algorithm based on random turbulent flow model is more stable, and it is more suitable to capture the wake region of the turbine blade schlieren image and estimate the transport velocity of the wake vortex after adding the weighted nonlocal smoothing term to the HS objective function
Keywords:fluid motion estimation;optical flow method;turbine cascade;schlieren;image processing
0 引言
在实验流体力学研究中,流体运动估计技术发挥着重要作用,从流体运动图像序列中提取速度场有助于更深入地了解复杂的流体运动。经典的流动显示技术如烟线法、纹影法等[1]只能用于定性描述。粒子图像测速(PIV)[2]具有非接触式、瞬时、可全流场速度测量等优势,但仍然难以捕捉到流场中的小尺度精细结构。HORN等[3]提出的HS光流法则可以提供单像素级的稠密速度场,并且应用对象不限于粒子图像。
HS光流法自提出后不断被改进以提升其对物体运动的预估能力,如传统的HS光流法采用二次型惩罚函数,对异常值太过敏感,SHULMAN等[4]将其改进为鲁棒性更好的L1惩罚函数;采用多尺度金字塔迭代方案应对大位移情况[5];引入高阶滤波器减弱光照不稳定的影响[6];在多尺度金字塔迭代中每一层间进行中值滤波以移除中间求解过程中的异常值[7]。
近年来,研究发现光流法非常适合流体运动估计,研究者通过在变分光流的目标函数中耦合描述流体特性的各种物理约束以提高光流法对流体运动估计的精度和鲁棒性。CORPETTI等[8]将流体连续方程和流体散度旋度作为变分目标函数的数据项和正则项,以有效捕捉流体运动的散度和旋度信息。蔡声泽[9]建立了基于随机湍流传输模型的变分光流算法,大大提高了湍流流体图像分析中的精确性。
目前还缺少该类方法在流体运动估计上的适用性系统研究。为了全面反映光流法在各种流体测速场景的应用效果,验证流体运动估计算法的精度和鲁棒性,本文采用了3种国内外具有代表性意义的光流法:经典HS光流法、非局部平滑Classic+NL光流法和基于随机湍流传输模型的变分光流算法。应用于流动情况由简单到复杂的图像序列,分别从定性、定量的角度评估测试结果,可为光流法在叶轮机械内流实验数据处理中的应用提供参考。
1 光流法原理
1)经典的变分光流法(HS光流法)原理推导如下。
在光照不变假设下,同一追踪单位像素点的灰度值在间隔很小的时间内(两帧图片间)保持不变:
I(x,y,t)=I(x+dx,y+dy,t+dt)(1)
式中I代表图像灰度值。对等式右边泰勒展开并整理,方程两边同时除以dt,并引入速度分量u和v:
引入全局速度场平滑约束:
结合式(2)和式(3)并采用二次型惩罚函数得到最小化函数能量泛函:
式中λ用于调整速度平滑项的所占权重。
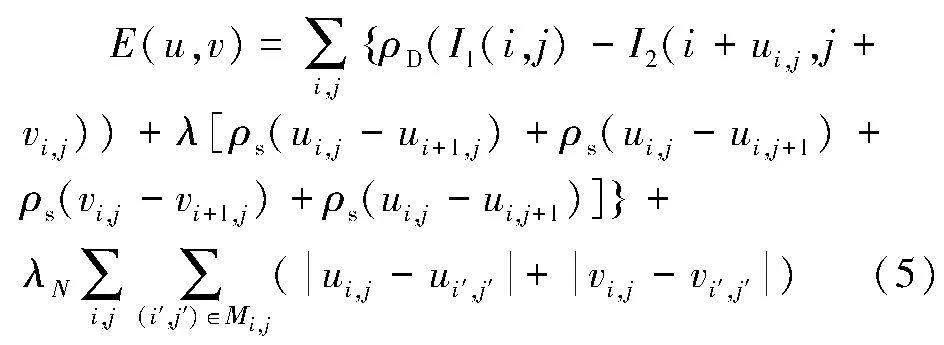
2)Classic+NL光流算法[10]中,把多尺度金字塔求解过程中每一层结尾的中值滤波过程以加权非局部平滑项的形式整合到HS目标函数中,虽主要应用对象为刚体,但也大大提高了算法对小尺度运动结构的捕获能力,尤其是运动边缘区域,能量泛函为
式中:ρD和ρs为数据项和正则项的惩罚函数;Mi,j为大范围区域内的像素点集合。
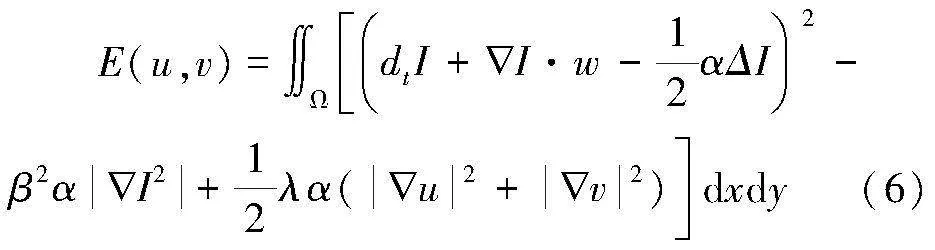
3)基于随机湍流传输模型的变分光流算法中,将无法被捕获的小尺度运动对网格点运动场的作用考虑到光流形式里,基于不确定性假设推导出随机湍流传输模型,数据项用随机传输算子的方差表示,在随机传输恒定动能的假设下推导出正则项。能量泛函为
式中:α为扩散因子,和速度u、v一样为未知量,求解过程中与速度场交叉迭代;权重系数λ不再靠经验取值手动调整;β是与随机程度有关的系数。
2 实验对象
本文选用了由图像合成器(synthetic images generator)[11]模拟生成的二维流动粒子/标量图像,如图1所示。
3 测试结果与讨论
本文采用了两种方式来实现流场可视化。
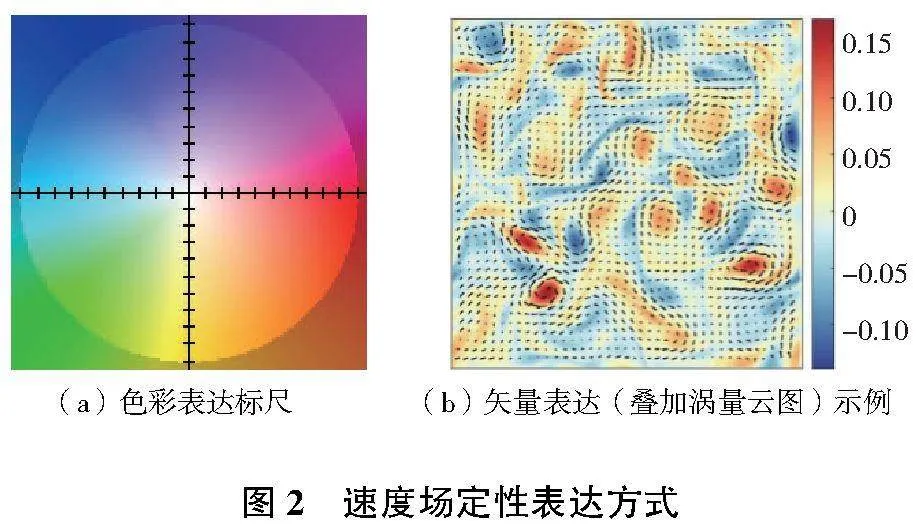
1)色彩信息表达:用颜色的种类表示速度方向,颜色的深浅表示速度大小,标尺如图2(a)所示。这种速度表达方式的优势在于可以同时表达速度的方向和大小,适用于在宏观运动角度评价稠密测试结果。
2)矢量表达:在每个像素点位置处以箭头的形式直观地表示出该点的速度,箭头指向代表该位置处流体的运动方向,箭头的长短代表速度大小。通常为了方便观察只展示稀疏矢量场,同时与涡量云图叠加,如图2(b)所示。
当存在真实速度场时,光流法最常用的性能定量评价方法是平均角度误差(AAE)和平均终点误差(end-point-error,AEPE),表达式如下:
式中:(ufi,vfi)和(ugti,vgti)分别代表预测速度矢量和真实速度矢量;N指图像中所有像素点个数。
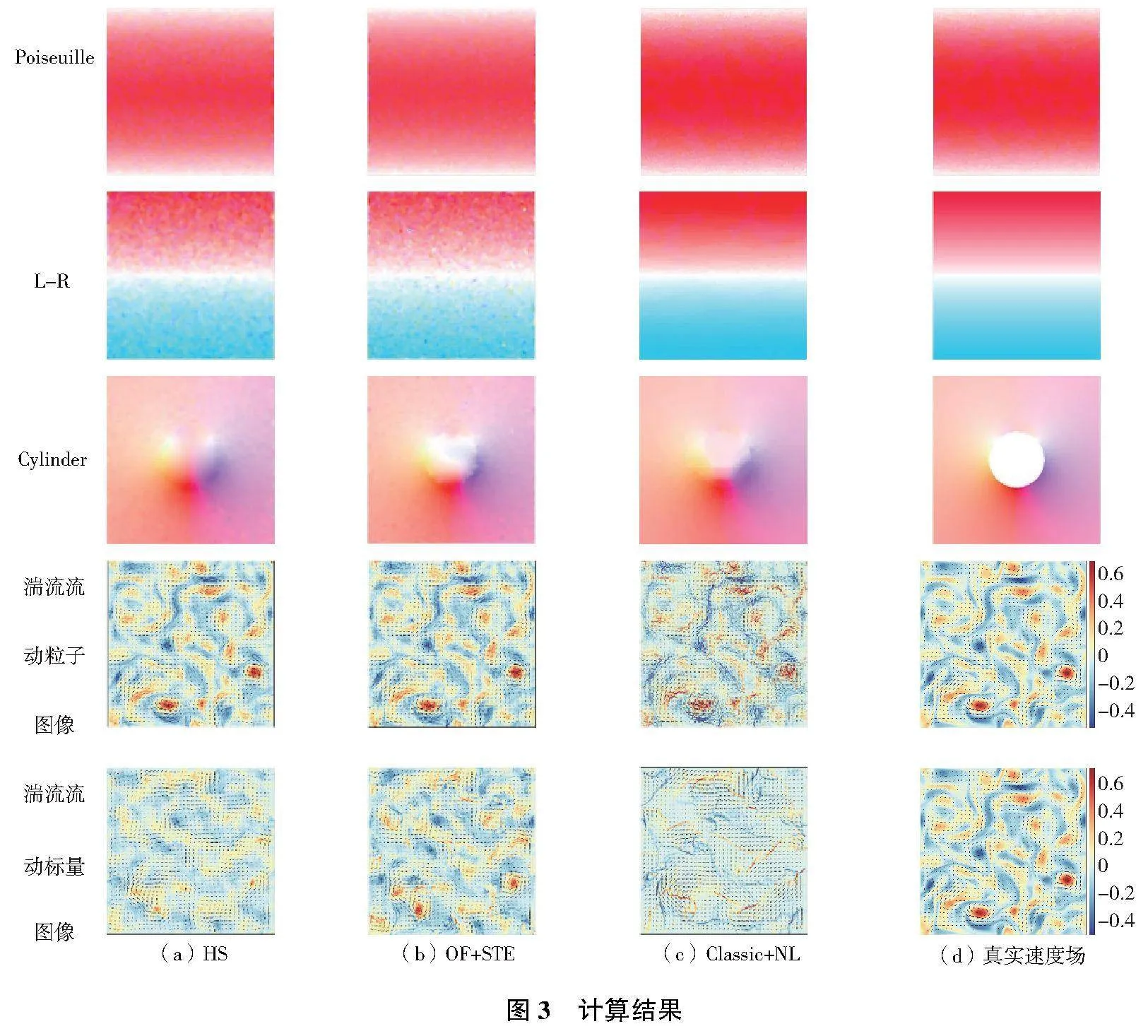
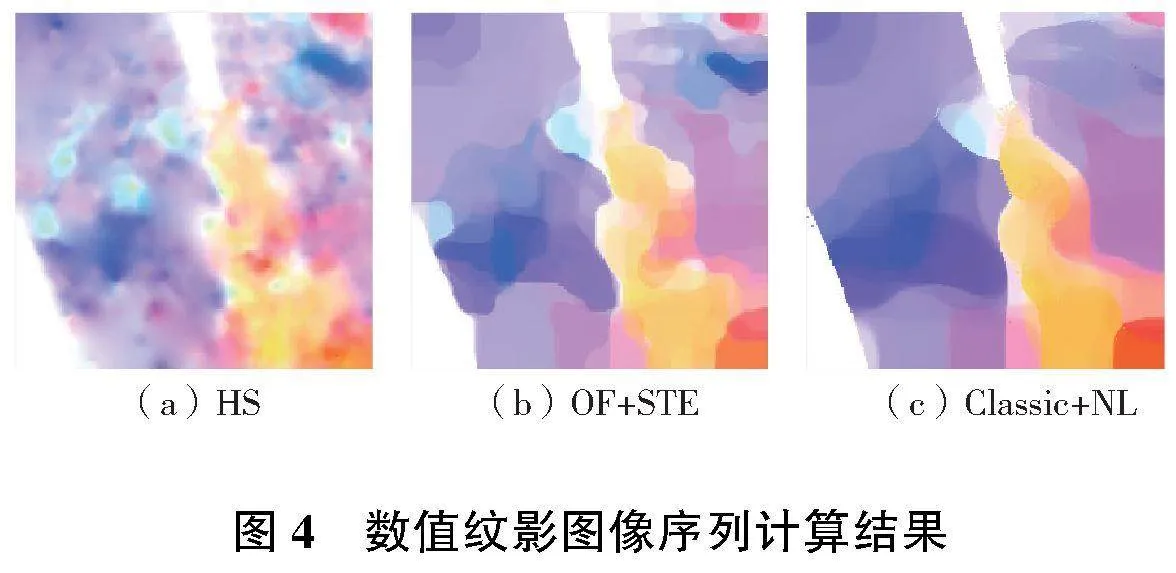
图3给出了由HS、OF+STE、Classic+NL 3种算法估计的Poiseuille、L-R、Cylinder 、湍流流动粒子图像及标量场图像序列、某涡轮叶片尾迹数值纹影图像序列速度场(本刊黑白印刷,疑问之处请咨询作者)。
Poiseuille图像序列:从彩色光流图上来看,3种方法均能正确估计出粒子整体向右的运动趋势且速度大小由中央向上下边缘逐渐变小,但Classic+NL结果更加准确,与真实速度场更接近,3种方法总体误差均较小。
L-R图像序列:HS和OF+STE的估计结果速度场不连续,存在浅色斑点,这表明在同一水平位置上速度大小和方向没有保持一致,后者也出现了一些异常噪点。流动情况复杂性的增加使光流算法的估计结果误差增大,但总体速度大小依然与真实速度场保持高度一致。Classic+NL的结果相较于前两种更加连续,这得益于能量方程中滤波因子的引入。
Cylinder图像序列:结果表示3种算法的估计结果中均出现了同样类型的误差即在圆空白区域(0速度)有了速度分布。这与金字塔多尺度迭代过程的中值滤波这一过程有关,当滤波核的中心恰巧在0速度区域边缘时,会将非0速度蔓延进该区域,使其边界不清晰,在去除异常值的同时给0速度区域的边缘带来了噪声。速度越大,蔓延的影响程度也就越大。从侵占非0速度区域这一影响来看,OF+STE算法表现最优,0速度区域更靠近实际情况。
湍流流动粒子和标量图像序列:HS算法在粒子图像序列应用效果要比标量图像序列好,涡量分布更接近真实情况。这是因为标量场图像相比于粒子图像亮度梯度变化不明显,光流追踪更加困难。在标量图像序列下,OF+STE算法相比HS算法表现出了明显的优势,尤其是在强涡量区域,能够捕捉到小尺度涡结构。Classic+NL算法表现较差,滤波因子在此时起了反作用。
涡轮叶片尾迹数值纹影图像序列:3种算法均捕捉到了尾迹涡的所在区域,但没有表现出涡结构,这是因为尾迹涡的输运速度相对涡的旋转速度较大,从而在两帧图片中主要表现为输运状态。Classic+NL测试结果边界更加清晰,说明当运动尺度较大时,该方法在确定尾迹涡边界时更具优势。需要注意的是:在尾迹区域外速度方向总体表现为左上,明显不符合实际情况。原因是伴随着尾迹涡的脱落,叶片尾缘两侧产生了压力波并且不断向上游传播,表现为尾迹区域外速度方向为来流的反方向,如图4所示。
图5给出不同算法对图像序列测试集的定量误差,包括平均角度误差AAE值和平均终点误差AEPE值。可以看出AAE和AEPE表现一致,与光流图表现一一对应。能够发现流动较简单的Poiseuille序列测试结果误差总是最小,并且随着流动情况更加复杂误差也不断增加。Cylinder测试结果误差总是最大,零速度区域的存在导致了误差总值显著地增加。
4 结语
本文采用3种光流算法用于流体稠密测速的研究,比较了不同应用场景下这3种光流算法的表现,结果如下。
1)流体流动较为简单时HS、OF+STE、Classic+NL这3种方法均能准确地提供稠密速度场。但随着流动情况复杂程度的增加,误差越来越大,尤其是应用对象中存在0速度区域时,滤波核工作时将周围的速度带进其中,出现了显著误差。
2)流动最复杂的粒子图像和标量场图像,OF+STE算法表现更稳定,估计结果更准确。
3)对于涡轮叶片尾迹纹影图像,压力波及其他干扰因素的存在使光流法已无法获得全场的稠密速度场,但可以提供脱落涡的输运速度,并且Classic+NL能够很好地捕捉到脱落涡所在区域。
参考文献
[1] HAN L S,COX W R. A visual study of turbine blade pressure-side boundary layers[J]. Journal of Engineering for Power,1983,105(1):47-52.
[2] RAFFEL M. Particle image velocimetry:a practical guide[M]. 2nd ed. Heidelberg:Springer,2007.
[3] HORN B K P,SCHUNCK B G. Determining optical flow[J]. Artificial Intelligence,1981,17(1/2/3):185-203.
[4] SHULMAN D,HERVE J Y. Regularization of discontinuous flow fields[C]//1989 Proceedings. Workshop on Visual Motion. Irvine,CA,USA: IEEE,2002:81-86.
[5] RUHNAU P,KOHLBERGER T,SCHNRR C,et al. Variational optical flow estimation for particle image velocimetry[J]. Experiments in Fluids,2005,38(1):21-32.
[6] BROX T,BRUHN A,PAPENBERG N,et al. High accuracy optical flow estimation based on a theory for warping[M]//Lecture Notes in Computer Science. Berlin,Heidelberg:Springer Berlin Heidelberg,2004:25-36.
[7] WEDEL A,POCK T,ZACH C,et al. An improved algorithm for TV-L1 optical flow[M]//Lecture Notes in Computer Science. Berlin,Heidelberg:Springer Berlin Heidelberg,2009:23-45.
[8] CORPETTI T,MEMIN E,PEREZ P. Dense estimation of fluid flows[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(3):365-380.
[9] 蔡声泽. 基于光流计算的复杂流动可视化测速算法研究[D]. 杭州:浙江大学,2019.
[10] SUN D Q,ROTH S,BLACK M J. A quantitative analysis of current practices in optical flow estimation and the principles behind them[J]. International Journal of Computer Vision,2014,106(2):115-137.
[11] CARLIER J. Second set of fluid mechanics image sequences-fluid image analysis and description[R]. Germany:University of Meannheim, 2006.
猜你喜欢
兵器装备工程学报(2020年10期)2020-11-05 06:11:02
电子制作(2018年18期)2018-11-14 01:48:20
现代职业教育·职业培训(2018年9期)2018-05-14 09:57:14
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
科技创新与应用(2017年8期)2017-04-26 21:57:41
软件导刊(2016年12期)2017-01-21 15:17:04
光学精密工程(2016年2期)2016-11-07 09:02:26
化工学报(2016年7期)2016-08-06 07:11:51
现代电子技术(2014年14期)2014-07-24 18:12:33