基于RBF神经网络的直线磁悬浮同步电动机控制优化
2024-10-25 00:00:00徐大帅郭军
机械制造与自动化 2024年5期






摘 要:选择数控机床进给控制系统的励磁直线电机作为研究对象,并根据该系统运行机制构建数学模型,设置误差函数以及RBF神经网络来实现逼近控制,通过自适应律验证了系统运行的稳定性,并开展仿真分析。空载启动下,RBF控制达到了最快的响应速率,经过0.17 s就进入制定悬浮高度处,与PID和SMC控制相比调节效率依次提升42.2%和24.1%。突加负载下,RBF控制悬浮气隙高度下降5.0×10-5 m,经过0.065 s恢复到原先状态,相对之前PID和SMC控制,动态降落显著减小,恢复时间也明显缩短。端部扰动下,RBF控制形成基本稳定响应,有助于获得更加稳定的气隙高度,使控制系统对端部效应起到明显抵抗作用。经测试可知:采用本控制策略能够实现系统抗干扰性能的显著提升。
关键词:数控机床;电动机;磁悬浮系统;RBF神经网络
中图分类号:TM383" 文献标志码:A" 文章编号:1671-5276(2024)05-0264-04
Control Optimization of Linear Maglev Synchronous Motor Based on RBF Neural Network
Abstract:The exciting linear motor of CNC machine tool feed control system is selected as the research object to construct the mathematical model according to the operation mechanism of the system. Error function and RBF neural network are set to realize the approximation control, the operating stability of the system is verified by the adaptive law, and the simulation analysis is carried out. Under no-load starting, RBF control reaches the fastest response rate and enters the designated suspension height after 0.17 s. Compared with PID control and SMC control, the adjustment efficiency increases by 42.2% and 24.1% respectively. Under sudden loading, the suspension air gap height under RBF control decreases by 5.0×10-5 m, and recovers to the original state after 0.065 s. Compared with the previous PID and SMC control, the dynamic landing is significantly reduced, and the recovery time is evidently shortened as well. Under end disturbance, RBF control forms a basically stable response, which helps to obtain a more stable air gap height, so that the control system can significantly resist the end effect. The test shows that the anti-interference performance of the system can be remarkablely improved by using the control strategy.
Keywords:numerical control machine tool;motor;magnetic levitation system;RBF neural network
0 引言
数控机床的进给控制系统通常选择可控励磁直线磁悬浮同步电机作为驱动结构,可以同时满足沿垂向的磁悬浮运动以及沿水平方向的进给运动,整体结构较为简单,并且具备快速响应以及满足多种工况使用的要求[1]。
可控励磁直线同步电机处于运行状态时,无须通过电磁铁进行多点支撑,从而达到无摩擦及无磨损的控制效果,并且可以利用悬浮系统实现直接悬浮的控制功能,目前已在工业领域获得广泛应用[2]。在进行零件加工期间,突然新增负载时将会产生扰动作用与纹波载荷,并且还会引起端部效应,从而对磁悬浮系统造成明显干扰;此外控制系统自身也表现出明显非线性变化以及强耦合的特点,由此增大了系统的整体控制难度。此时需设置更优控制方案来增强电机控制系统运行稳定性并获得更高的控制精度。
自适应控制是对外部存在强扰动状态下的非线性控制系统进行高效控制的一种技术,其原理是根据参数估计方法构建最优控制模型[3]。为了适应更复杂的控制对象,有学者采用自适应控制和非线性控制算法相结合的方式来达到对非线性系统进行优化控制的效果。张营等[4]则综合运用自适应控制和模糊反演方法对永磁同步电机进行位置调节,确保位置误差分布于一个很小的区间内。张永顺等[5]同时采用自适应控制和滑模控制方法来提升球形腕控制过程的抗干扰能力,从而达到准确定位的功能。到20世纪80年代,自适应理论已经获得了人们的深入研究,神经网络自适应控制(NNAC)算法除了具备优异自适应鲁棒性以外,还拥有良好的学习容错控制性能,因此该算法在非线性控制领域获得了广泛使用。WEN等[6]选择自适应神经网络对二阶非线性系统进行跟随控制,利用神经网络算法设计最优逼近模型。CHEN等[7]设计了一种优化NNAC算法,可以利用该算法准确跟踪非线性系统运动轨迹。SUN等[8]通过设计自适应神经模糊滑模控制算法来降低磁悬浮系统干扰影响并有效抑制参数扰动。赵石铁等[9]报道了以RBF神经网络来辨识系统控制性能的内容,同时加入自适应控制算法使系统获得更强抗干扰能力。
本文选择励磁直线电机作为研究对象,重点探讨了非线性磁悬浮系统的控制过程,并根据该系统运行机制构建了数学模型,同时设置了误差函数以及RBF神经网络来实现逼近控制。通过自适应律验证了系统运行的稳定性,经仿真测试可知采用本文控制策略能够实现系统抗干扰性能的显著提升。
1 直线同步电动机原理
采用直线磁悬浮同步电动机(LMLSM)进行驱动控制的具体原理为:为磁悬浮绕组设置直流励磁驱动模式,同时在法向上形成法向麦克斯韦力来达到支撑电机悬浮的效果[10]。当推力绕组内形成三相交流电流时将会激发出行波磁场,之后与励磁磁场作用形成水平电磁推力。
随着悬浮高度的变化,进入某一特定位置时将会形成同样大小的磁悬浮力和平台重力,由此完成稳定的悬浮控制[11]。处于扰动环境中时,可以利用磁悬浮控制器实现励磁电流的调控功能,从而适应气隙尺寸的变化,能够起到抵抗外部干扰的效果,确保悬浮高度保持恒定状态。
2 RBF神经网络逼近
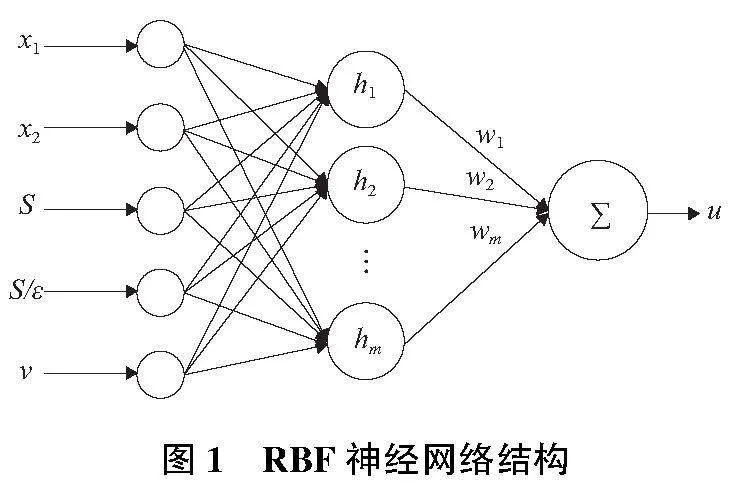
RBF神经网络属于一类3层结构的前馈神经网络,如图1所示。其包含了输入层、隐层及输出层共3部分[12]。
图1中u表示网络输出,hj 是高斯函数:
式中:c表示中心坐标矢量;bj为高斯函数宽度,j取值为1, 2,…,m。
u(z)=WTh(z)+μ(2)
式中:矢量z表示RBF神经网络输入;μ表示存在边界的网络逼近误差。
以自适应控制器u作为网络输出,存在以下关系[13]:
3 仿真研究
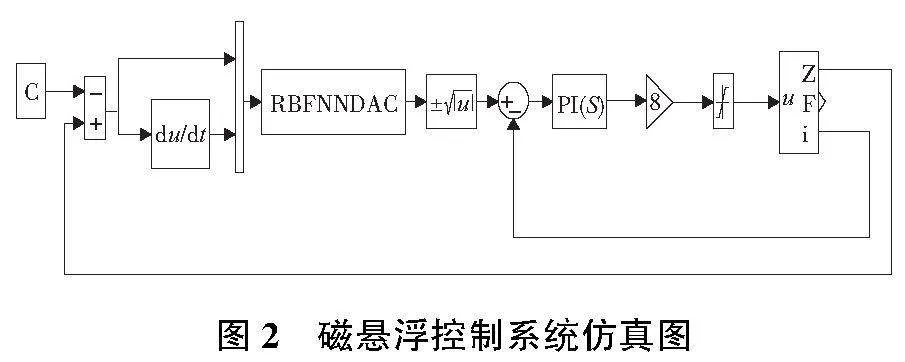
图2给出了LMSLM系统的仿真控制结构,通过RBF神经网络自适应器设置系统位置环,同时以PI控制器设置电流环。
设定以下的LMLSM参数:直轴主电感与交轴电感分别为Lmd=0.088 H与0.021 H;电枢电阻Rs=1.3 Ω;极对数3;极距=0.05m;励磁电流5A;平台质量M=32kg;磁悬浮系数H=6.022×10-6。
建立4-12-1的网络结构,设定以下参数:
以Simulink软件构建仿真模型,通过RBF方法对神经网络开展仿真测试,再跟文献[14]的滑模控制(SMC)和PID控制方式开展比较。
1)空载启动:磁悬浮系统以3mm的最初气隙高度作为起点,将目标高度设定在2.5mm,得到如图3所示的系统响应结果。
图3显示,以PID方式进行控制时,经过0.29s左右到达设定悬浮气隙高度,需要消耗较长的调节时间;以SMC方式进行调节时,可以实现快速响应,只需0.21s就进入设定悬浮高度位置;以RBF方式进行控制时,系统达到了最快的响应速率,经过0.17s就进入设定悬浮高度处,与前面两种控制方式相比调节效率依次提升42.2%和24.1%。由此可见,RBF具备最优启动性能。
2)突加负载:当磁悬浮系统到达0.3s的稳定状态后,新增30N阶跃负载并在0.65s时,将扰动信号去除,得到如图4所示的磁悬浮气隙高度变化结果。
如图4所示,以PID方式进行控制时,悬浮气隙高度下降了5.5×10-5m,经过0.3s后恢复到原先状态,缺乏良好的抗干扰性能;以SMC方式进行控制时,悬浮气隙高度减小了5.3×10-5m,经过0.11s恢复到原先状态;以RBF进行控制时,悬浮气隙高度下降5.0×10-5m,之后经过0.065s恢复到原先状态,相对之前两种控制方式,都发生了动态降落的显著减小,同时恢复时间也明显缩短。因此可以判断在恒定阶跃扰动下时,采用RBF控制方式可以减缓悬浮高度的变化程度,从而快速进入稳定阶段,实现系统抗干扰能力的大幅提升。
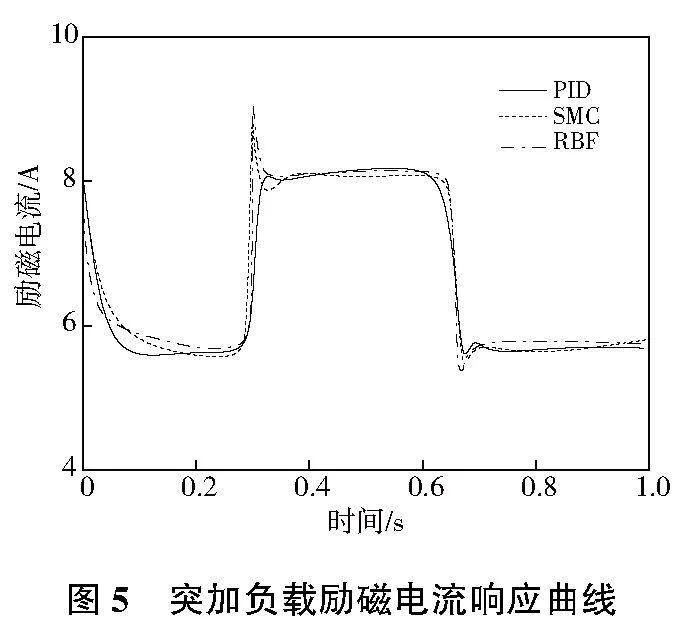
图5给出了对励磁电流进行测试得到的响应曲线。其中,以PID方式进行控制时,经过0.25s恢复至原先状态;以SMC方式进行控制时,经过0.11s恢复至原先状态,超调比例接近13%;以RBF方式进行控制时,经过0.03s完成恢复过程,超调比例接近10.5%。
图6显示:以PID方式控制时,响应曲线发生了大幅变化;以SMC方式控制时,响应曲线只发生小幅变化;以RBF方式控制时,则形成基本稳定的响应曲线。由此可见,受到电机端部作用时,RBF控制方式有助于获得更加稳定的气隙高度,使控制系统对端部效应起到更明显抵抗作用。
4 结语
1)空载启动:以RBF方式控制时,系统达到了最快的响应速率,经过0.17s就进入制定悬浮高度处,与PID和SMC两种控制方式相比,调节效率分别提升42.2%和24.1%。
2)突加负载:以RBF方式控制时,悬浮气隙高度下降5.0×10-5m,经过0.065s恢复到原先状态,相对之前PID和SMC控制方式,发生了动态降落的显著减小,同时恢复时间也明显缩短。
3)端部扰动的模拟过程:以RBF方式控制时,形成基本稳定的响应曲线,有助于获得更加稳定的气隙高度,使控制系统对端部效应起到更明显抵抗作用。
参考文献:
[1] 智淑亚,吴洪兵. 数控进给伺服系统摩擦补偿控制仿真[J]. 沈阳工业大学学报,2019,41(4):361-365.
[2] 陈永波,燕延,王伟明,等. 磁悬浮直线电机三维有限元分析及优化设计研究[J]. 组合机床与自动化加工技术,2017(1):31-34.
[3] GAOH,SONG Y D,WEN C Y. Backstepping design of adaptive neural fault-tolerant control for MIMO nonlinear systems[J]. IEEE Transactions on Neural Networks and Learning Systems,2017,28(11):2605-2613.
[4] 张营,巩永光,郭亚军. 自适应模糊反演控制在机床永磁同步电机位置控制中的应用[J]. 机床与液压,2020,48(5):119-123.
[5] 张永顺,郭建超,王新,等. 不确定环境球型腕自适应滑模扰动控制[J]. 机械工程学报,2015,51(19):21-27.
[6] WEN G X,PHILIP CHEN C L,LIU Y J,et al. Neural network-based adaptive leader-following consensus control for a class of nonlinear multiagent state-delay systems[J]. IEEE Transactions on Cybernetics,2017,47(8):2151-2160.
[7] CHEN C W,CHEN P C,CHIANG W L. Modified intelligent genetic algorithm-based adaptive neural network control for uncertain structural systems[J]. Journal of Vibration and Control,2013,19(9):1333-1347.
[8] SUN Y G,XU J Q,QIANG H Y,et al. Adaptive neural-fuzzy robust position control scheme for maglev train systems with experimental verification[J]. IEEE Transactions on Industrial Electronics,2019,66(11):8589-8599.
[9] 赵石铁,高宪文,车昌杰. 基于RBF神经网络的非线性磁悬浮系统控制[J]. 东北大学学报(自然科学版),2014,35(12):1673-1676,1696.
[10] 卢晓慧,梁加红. 直驱型机电作动器中永磁容错电机非线性模型研究[J]. 中国电机工程学报,2012,32(18):145-151,189.
[11] 严欣平. 无轴承永磁同步电机电磁设计与控制策略研究[D]. 重庆:重庆大学,2008.
[12] 吴宝强,孙炜,曹成. 柔性和摩擦力不确定条件下RBF神经网络自适应轨迹跟踪方法[J]. 机械工程学报,2012,48(19):23-28.
[13] 高贯斌,王文,林铿,等. 基于RBF神经网络的关节转角误差补偿[J]. 机械工程学报,2010,46(12):20-24.
[14] 张志勰,虞旦. BP和RBF神经网络在函数逼近上的对比与研究[J]. 工业控制计算机,2018,31(5):119-120.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
制造技术与机床(2019年12期)2020-01-06 03:17:26
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
电子制作(2017年20期)2017-04-26 06:57:41
科教导刊·电子版(2016年26期)2016-11-21 09:50:44
电脑知识与技术(2016年25期)2016-11-16 14:27:21
科技视界(2016年18期)2016-11-03 23:59:24
企业导报(2016年6期)2016-04-21 15:48:21