基于深度学习的无人机视觉测量系统的设计与应用
2024-10-23 00:00:00敬永东
电脑知识与技术 2024年25期
关键词:深度学习;无人机;视觉测量;定位
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2024)25-0021-03
0 引言
随着科技的飞速发展,无人机技术和深度学习在计算机视觉领域的应用日益广泛。无人机作为一种高效、灵活的空中平台,其搭载的摄像头和传感器能够实时获取大量图像和视频数据[1]。而以神经网络算法为典型代表的深度学习技术,能够实现对这些数据进行高级处理和精确分析,从而在多个领域展现出巨大潜力。在当前的无人机视觉测量领域,传统的方法主要依赖于人工操作或简单的图像处理技术,这些方法在精度、效率和自动化程度等方面存在较大局限性。而基于深度学习的无人机视觉测量系统,通过结合无人机的高机动性和深度学习的强大处理能力,能够实现对目标物体的快速、精确测量,并且能够自动化完成复杂任务,具有广阔的应用前景[2]。
在整个无人机视觉测量系统中,其主要采用深度学习的技术,以此自动提取图像中的特征和目标,实现对目标物体的精确识别和测量。与传统的测量方法相比,该系统具有更高的精度和稳定性,能够满足更高精度的测量需求。该系统能够实时获取图像和视频数据,并通过深度学习算法进行快速处理和分析。与传统的人工操作相比,该系统能够大大提高测量效率,减少人力成本和时间成本。
1 关键技术
1.1 深度学习
视觉测量中的深度学习技术是一种重要的应用,采用计算机视觉的处理思路,以此来实现高精度的测量和识别任务。对于被测物体,通过图像聚焦处理、图像确定、照明与输出处理等步骤能够将图像的内在特征进行计算机语言的处理。整个图像的分类主要采用深度学习的算法进行处理,比如将图像识别为动物、车辆、食物等类别[3]。
深度学习算法的原理与步骤是:卷积神经网络是视觉测量中广泛应用的一种深度学习模型。CNN通过模拟人类视觉系统的处理方式,能够自动并有效地从图像中提取空间层级特征,在处理图像数据时,CNN通过多个卷积层逐渐从像素级的特征(如边缘和角点)学习到更高级的语义特征(如形状和纹理),这一过程不仅减少了手动特征设计的需求,而且提高了特征的泛化能力。基于候选区域的目标检测算法主要分为两个步骤:候选区域的生成和目标的分类及定位。这类算法首先在图像中生成可能包含目标的候选框,随后利用卷积网络对这些候选区域进行特征提取和分类。这种方法虽然在精度上有较好的表现,但计算量较大,速度相对较慢。而基于回归的单步算法则通过直接预测目标的类别和边界框,实现了更快的检测速度。这类算法通过简化检测流程,减少了计算复杂度,适用于需要快速检测的应用场景。
深度学习模型可以估计图像中物体或人体的姿态和动作。在视觉测量中,姿态估计可以用于识别物体的姿态和位置关系,从而实现对物体姿态的精确测量。系统标定主要任务有两个方面:第一方面是需要对摄像机的外部参数与内部参数进行整合处理,第二部分是将图像二维坐标与空间三维坐标系进行转化。视觉测量中的深度学习技术通过结合计算机视觉和深度学习的原理,实现了高精度的测量和识别任务。这些技术不仅可以提高测量的准确性和效率,还可以应用于各种领域,如自动驾驶、医学图像处理、工业检测等[4]。
1.2 SORT算法
人机视觉测量系统的目标检测与跟踪算法在无人机应用中起着至关重要的作用。目标跟踪与检测主要采用了深度学习方面的技术进行实现,使得无人机能够准确、快速地检测和跟踪目标。
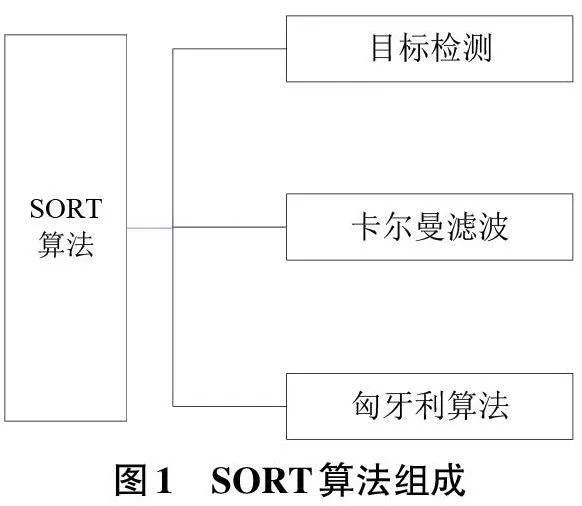
SORT(Simple Online and Realtime Tracking) 目标跟踪算法是一种简单、在线和实时的多目标跟踪方法[5]。SORT 算法是基于“tracking-by-detection”框架的在线多目标跟踪算法,它通过目标检测算法获取每帧图像中的目标位置信息,然后利用这些信息实现目标的跟踪。SORT算法的核心思想是将多目标跟踪问题转化为一个简单的数据关联问题。整个算法的组成具体如图1所示。
从图1可以看出,SORT算法包括:目标检测,使用目标检测算法(如Faster RCNN、YOLO等)来获取当前帧中的目标位置信息,这些信息通常用一个矩形框来表示。卡尔曼滤波,利用卡尔曼滤波器来预测目标在下一帧中的位置,这有助于在目标被遮挡或暂时消失后重新找回目标;匈牙利算法,用于解决目标之间的匹配问题,即在当前帧中找到与之前帧中目标相对应的目标。
SORT算法的原理相对简单,易于理解和实现。该算法只能利用当前和之前帧的检测结果进行目标跟踪,不能利用未来帧的信息,这符合在线跟踪的要求。由于算法的高效性,SORT能够实现实时目标跟踪,适用于需要快速响应的应用场景。
SORT算法的工作流程可以分为四个主要阶段,依次为:检测阶段,此阶段的主要任务是通过目标检测器获取目标框。这些目标框是由目标检测算法生成的,可能采用Faster RCNN、YOLO等不同的检测算法;运动估计阶段,在这一阶段,卡尔曼滤波器被用来预测当前帧的Tracks,这一过程是根据每个被跟踪物体的状态来预测它们在下一帧中的位置与速度等信息;数据关联阶段,此阶段核心任务是将检测模块输出的Detections和预测的Tracks进行匹配;目标管理阶段,管理阶段包括被跟踪物体的创建与销毁,当新的检测产生时,会为其创建新的轨道,而在连续多次未能匹配已存在轨道时,会销毁相应目标。这个机制保证了算法能够灵活处理新目标的出现和旧目标的消失,使跟踪过程适应场景的变化。
2 系统分析与设计
2.1 系统业务分析
无人机视觉测量系统的业务流程分为前期准备、飞行作业、数据处理与结果输出等几个阶段,具体业务流程如下:
前期准备阶段中根据测绘任务的具体要求,以此来确定整个测量范围、数据类型与精度要求,根据任务需求,选择适合的无人机型号和视觉测量设备,如相机、激光雷达等。飞行作业阶段中按照飞行计划进行无人机飞行,同时开启视觉测量设备进行数据采集,地面站能够实时获取这些采集的数据信息,并进行实时监控,确保数据的完整性和准确性。数据采集之后进入数据处理阶段,整个处理过程分为预处理、特征提取操作与几何分析处理过程。预处理的过程主要有图像增强操作、畸变校正处理等过程;特征提取主要是对边界与目标进行处理,提取的特征有线、点与其他方面的特征;几何处理过程主要目标是确定测试目标的姿态及三维坐标。对三维重建得到的数据进行进一步的处理和分析,如滤波、平滑、分类等,以满足具体的应用需求。结果输出阶段中将处理后的数据以适当的形式进行输出,如点云数据、三维模型、图像等,结合具体的处理需要,将输出的结果应用于具体的领域,如城市规划、建筑设计、环境监测等。
2.2 系统总体设计
对于无人机视觉测量系统而言,其总体是对深度学习、无人机与视觉技术等多种技术集成的综合系统。该系统通过无人机搭载的视觉传感器(如高清相机、激光雷达等)获取目标区域的图像或点云数据,然后利用深度学习算法对图像或点云数据进行处理和分析,从而实现对目标区域的精确测量和识别。
整个系统分为无人机平台、视觉传感器、数据传输系统与深度学习处理模块,详细内容是:无人机平台:选择适合任务需求的无人机平台,如固定翼、旋翼或混合动力无人机等。
无人机平台应具备良好的飞行稳定性、续航能力和载荷能力。视觉传感器:在整个测量系统之中,根据具体业务的不同来确定对应的激光雷达、红外相机等视觉传感器,视觉传感器应具备高分辨率、高帧率、低噪声等特性,以确保获取高质量的图像或点云数据。数据传输系统:负责将无人机采集的图像或点云数据实时传输到地面站或云端服务器进行处理。数据传输系统应具备高速、稳定、可靠的特性,以确保数据的实时性和准确性。深度学习处理模块:利用深度学习算法对图像或点云数据进行处理和分析,实现对目标区域的精确测量和识别。深度学习处理模块应具备高效、准确、可扩展的特性,以适应不同任务需求。
2.3 系统业务功能设计
在无人机视觉测量系统中,深度学习算法的功能设计是关键,它负责处理无人机捕获的视觉数据,以提供准确测量和分析结果。整个功能设计处理过程如下:
1) 目标检测与跟踪。此业务功能主要采用YOLO 模型算法来完成目标的检测与分析,以此来自动识别和定位图像中的目标物体。通过对大量标注过的图像数据进行训练,完成目标物体特征的学习与确定,并在新的图像中准确检测出目标。对这个检测目标进行检测确认之后采用SORT算法进行确定,以在连续的图像帧中跟踪目标物体的位置和运动轨迹。
2) 三维重建。利用无人机捕获的多视角图像或点云数据,整个三维重建算法的实现主要通过基于深度学习的方式来进行,如使用体素网格(Voxel Grid) 或点云网络(PointNet) 等模型,来构建目标物体或场景的三维模型。通过训练模型学习如何从二维图像或点云数据中恢复三维结构,实现对目标物体或场景的精确测量。
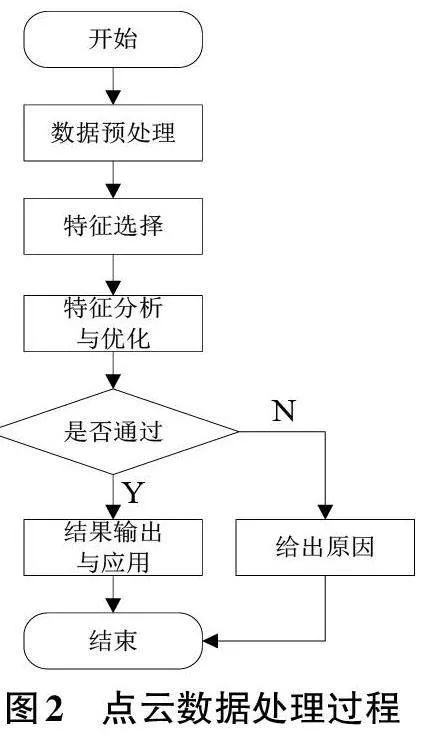
3) 特征提取与异常检测。设计特征提取算法,用于从无人机捕获的图像或点云数据中提取关键特征,如边缘、角点、纹理等,这些特征可以用于后续的测量、分类和识别任务。整个异常检测的过程采用深度学习算法进行,用于检测无人机捕获的图像或点云数据中的异常或异常变化,有助于及时发现并处理潜在的安全问题或故障。点云数据中提取关键特征的主要步骤如图2所示。
图2主要分为:1) 数据预处理。无人机通过搭载的激光雷达设备捕获目标区域的点云数据;预处理,去除噪声和离群点,例如使用统计滤波或体素滤波等方法,如果点云数据来源多个帧或扫描,可能需要进行配准(对齐)以形成统一的点云模型。2) 特征提取。主要使用深度学习模型从点云中提取高级特征,这些特征通常对复杂的形状和结构具有更好的描述能力。3) 特征分析与优化。使用可视化工具将提取的特征进行可视化,以便于分析和理解;根据应用场景的需求,选择最相关的特征子集。4) 结果输出与应用。将提取的关键特征以文件或数据库的形式保存,以便后续使用。
3 系统应用效果分析
基于深度学习的无人机测量系统应用效果分析可以从多个方面展开,具体内容包括:
1) 提升准确性。深度学习算法能够自动从大量数据中学习并提取出关键特征,这对于无人机测量系统来说至关重要。通过深度学习,无人机可以更准确地识别地面目标、测量距离和高度等参数。相比传统的基于规则或手动设计特征的方法,深度学习能够处理更复杂、更多样的场景,提高测量的准确性和鲁棒性。
2) 增强实时性。深度学习算法通常具有高效的计算性能,能够实时处理无人机采集的数据,这使得无人机测量系统能够实时反馈测量结果,为决策提供及时的支持。
3) 增强适应性。深度学习算法具有很强的适应性,能够处理不同类型和规模的数据集,如城市、山区、水域等。在复杂多变的环境中,基于深度学习的无人机测量系统能够自动调整参数和策略,以应对各种挑战。
4) 提升智能化。通过深度学习,无人机测量系统可以实现更高级别的智能化。智能化不仅提高了测量的效率和准确性,还降低了操作人员的工作负担和技能要求。
基于深度学习的无人机测量系统应用效果显著,可以提高测量的准确性、实时性、适应性和智能化水平,为相关行业带来更高的价值和效益。然而,需要注意的是,深度学习算法的训练和优化需要大量的数据和计算资源,因此在实际应用中需要综合考虑成本和效益等因素。
4 结束语
本研究深入探讨了深度学习在无人机测量系统中的应用,通过构建和优化深度学习模型,成功提升了无人机测量的准确性、实时性和智能化水平。这些成果不仅体现了深度学习技术的强大潜力,同时给无人机在测量领域的发展与应用奠定了新的基础。