沙漠履带式运输车通过性仿真与试验
2024-10-19 00:00:00王宝昌孙术发张嘉仪刘晋浩
森林工程 2024年4期










摘 要:为提高沙漠地区车辆运输车能力,通过对沙漠土壤参数和履带车辆在松软地面通过性理论的分析,设计一种配备三角履带板的LY352J型沙漠履带式运输车。该车能够进行人员物资运输、车辆牵引、绞盘牵引作业,主要由三角履带板、绞盘和驾驶室等关键部位组成。通过理论分析和计算,确定各关键部件参数及沙漠履带式运输车在沙漠松软地面下的牵引通过性,应用Creo软件建立该履带车辆的虚拟样机模型,并采用RecurDyn(Recursive Dynamic)动力学仿真软件对车辆履带的最佳张紧力选择、直行、爬坡、转弯进行模拟仿真。结果显示,车重45%的条件下履带最佳张紧力为26.46 kN,能够保证车辆运行平稳且各项性能良好;上坡仿真得到的最大坡度为30°;转向动力学仿真中,车辆在路面上的转向稳定性较优,但在转弯时车辆容易失稳,会出现横向倾斜。最后在试验场地对试验样机进行直行、纵向爬坡和转向试验,验证该车型在沙漠地形实际行走时具有良好通过性能,能够克服轮式运输车在沙地沉陷的弊端,可满足现阶段沙漠地形运输作业的需求。
关键词:履带底盘; 沙漠地形; 通过性; 多体动力学分析
中图分类号:S219.2 文献标识码:A DOI:10.7525/j.issn.1006-8023.2024.04.020
Chassis Trafficability Simulation and Experiment of Desert Crawler Transport Vehicle
WANG Baochang1, SUN Shufa2*, ZHANG Jiayi2, LIU Jinhao3
(1.Qingdao Harbour Vocational & Technical College, Qingdao 266404, China;2.College of Civil and Transportation, Northeast Forestry University, Harbin 150040, China;3.The School of Technology, Beijing Forestry University, Beijing 100038, China)
Abstract: In order to improve vehicle′s trafficability in the desert, based on the analysis of the desert soil parameters and the theory of traficability of crawler vehicles on soft ground, a LY352J desert crawler transport vehicle equipped with triangular track shoes was developed. This vehicle can carry out personnel and material transportation, vehicle traction, and winch tration operations, mainly composed of key parts such as triangular track shoes, winch and cab. Through theoretical analysis and calculation, the parameters of each key component andh traction traficability of desert crawler transport vehicle on soft desert ground were determined. Creo software was used to build a virtual prototype, and RecurDyn (Recursive Dynamic) dynamic simulation software was used to simulate the optimal tension selection, straight driving, climbing, and turning of vehicle crawler. The results showed that, under the condition of 45% vehicle weight, the optimal tension of the track was 26.46 kN; under the condition of 26.46 kN track tension (45% vehicle weight), it could ensure the smooth operation and good performance of the vehicle; the maximum slope obtained by uphill simulation was 30°; in the steering dynamics simulation, the steering stability of the vehicle on the road was better, but it was easy to lose stability when turning, and it would appear lateral inclination. At last, the experiments of straight running, longitudinal climbing and turning of test vehicle were carried out in test site, and it was verified that the vehicle had good trafficability when actually walking in the desert terrain, and can overcome the drawbacks of wheeled transport vehicles sinking in sand, meeting the requirements of current desert terrain transportion operations.
Keywords: Crawler chassis; desert terrain; traficability; multivariate dynamic analysis
0 引言
中国沙漠面积在世界各国排名当中处于前列,但随着林业生态建设工程、退耕还林还草等措施的开展,中国沙漠面积总量逐渐减小[1]。沙漠资源的开发、治沙防沙工程的开展需要深入沙漠进行必要的科研和工程作业活动。开发适用于沙漠地形的运输工具——沙漠车,可以提高防沙治沙效率,降低作业成本,保障人身安全[2]。因此,研制一种性能可靠、在沙漠地形通过性强的沙漠车具有重要意义。
欧洲芬兰的SISU公司[3]开发出的6×6轮式沙漠车品种齐全、质量优良,具有较高的技术水平,基本满足了在对沙漠专用车和底盘的要求,但存在着价格昂贵、维修使用成本较高,且在阻力大、附着力差的沙漠土壤环境上行驶时容易出现下陷打滑的风险。履带车辆因其接地面积大,附着性能好,在哈尔滨第一机械集团研制的蟒式全地形双节履带车[4]通过铰接机将前后车进行铰接,增大履带车辆与地面的接触面积、减小接地比压,使得车辆对地面具有良好的附着性,从而在全地形具有卓越的越野机动性能和牵引性能,但存在着自身挡板较厚、重量大、造价昂贵、维修运行成本较高的问题。
大多数学者对履带车辆在沙漠松软地面的通过性进行了相关的理论和仿真分析[5-9],但主要处于理论研究阶段,缺少了相关的实车验证。本研究参考已有的履带车辆装备,并结合国内沙漠土壤的特点,设计了一台配备三角履带的沙漠地形履带式运输车,该车能够在沙漠地形进行物资输送作业。样机在大庆杜尔伯特试验场地进行实车试验,试验结果表明,LY352J型沙漠履带式运输车整体性能表现良好,在沙漠松软地面具有良好的通过性。该机的研发为沙漠地形履带式运输车的结构完善和作业性能优化提供了参考,具有重要的现实意义。
1 整机设计
1.1 理论分析
本研究沙地参数选取干沙地边缘处,此处为沙地车作业的主要区域,用于防风固沙作业,查找文献[9]并结合沙漠履带车试验沙地参数,得到试验场地的沙漠土壤相关参数见表1。
履带车辆能够在松软地面行驶通过的必要条件是切向牵引力大于车辆的行驶阻力,用牵引系数(S)表示[10],可以表现为式(1)
S=(F_Hmax-F)/W。 (1)
式中:FH max为切线牵引力的最大值;F为行驶阻力;W为车辆重力。
当车辆在松软地面上行驶时,履刺嵌入土中同土壤之间进行剪切和挤压产生切向牵引力;行驶阻力主要由土壤因挤压垂直变形形成的推土阻力和压实阻力构成。
假定履带接地压力均匀分布,切线牵引力(FH)计算为式(2)和式(3)
F_H=2b∫_0^L▒〖(c+W/2bL tanφ)(1-e^(-ix/k))dx〗。 (2)
F_H=2bL(c+W/2bL tanφ)[1-K/iL(1-e^(-iL/k))]。 (3)
式中:b为履带板宽度;L为履带接地长度;c为土壤内聚力;W为车辆重力;φ为土壤内摩擦角;i为车辆滑转率;K为土的变形模量。
当履带完全打滑时,即滑转率i=100%,且K/L≈0时,切线牵引力最大,见式(4)
F_Hmax=Ac+Wtanφ (4)
式中,A为履带接地面积。
依据沙漠土壤参数和沙漠履带式运输车的运行要求[11],车辆总质量设计为6 000 kg,履带宽度设计为450 mm,履带接地长度设计为1 600 mm,挂钩牵引力设计为不小于30 kN。履带车整车载重设计为使整车达到最优平稳性能[12],节距设计为175 mm,节数设计为56节,履带板厚度为35 mm。带宽与带长比值为0.28,符合在软地面路况下行驶的要求[13]。根据式(4)计算车辆最大牵引力FH max为32.66 kN。
车辆压实土壤形成车辙消耗能量形成压实阻力,当车辆前进L距离时,消耗的功(w)见式(5)
w=2bL∫_0^(z_0)▒pdz。 (5)
式中:p为履带支撑段面积上承受压力;z_0为履带轨辙深度。
将贝克的压力沉陷式(6)[14]代入式(5)中,并积分得式(7)
p=(k_c/b+k_φ ) z^n。 (6)
F_c=2b(k_c/b+k_φ)(z_0^(n+1))/(n+1)。 (7)
式中:k_c为土壤内聚力变形模量;k_φ为土壤内摩擦角变形模量。
履带车辆的沉陷量(z_0)见式(8)
z_0=(p/(k_c/b+k_φ ))^(1/n)。 (8)
假定履带接地压力均匀分布,那么土壤被压实时,地面单位面积所受压力见式(9)
p=W/A=W/2bL。 (9)
最终得压实阻力(Fc)的计算公式为
F_c=2/((k_c+bk_φ )^(1/n) ) 〖(W/2L)〗^((n+1)/n)×1/(n+1)。 (10)
当车辆在松软地面行驶时,滚动着的车轮的前缘推动土壤形成隆起的前缘波,其产生阻碍车轮滚动的力,称为推土阻力(Fb),当破坏形式为局部剪切破坏时,推土阻力计算见式(11)
Fb=0.5γz_0^2b[((3N_γ)/tanφ+1)cos2φ]+0.67bz0c[(Nc-2/3tanφ)cos2φ]。 (11)
式中:N_c、N_γ为局部剪切破坏时的承载能力系数;γ为土的密度;b为推土板宽度;H为推土深度;q为均布载荷。
松软土壤被破坏的载荷界限比较模糊,会发生整体的剪切变形以及局部的剪切破坏。因φ=28°,查太沙基图[15]得N_c=14,N_γ=5。由式(10)和式(11)计算的车辆总阻力为1.071 kN。
综上通过式(1)计算的牵引系数S>0,最大切线牵引力与挂钩牵引力和阻力的差值已达到设计要求。
沙漠履带式运输车所需最大功率(P)计算见式(12)
P=(F_Hmax V_max)/(1 000)。 (12)
式中:FH max为车辆最大牵引力;V_max为最大速度。
根据式(12)计算所得功率为32.56 kW,发动机功率储备系数选为1.5,即选择功率为55 kW的柴油发动机。
1.2 结构设计
本项目设计的三角履带板随着土质硬度的变化,其接地压力也会随之变化。在行驶过程中,因三角履带板具有较低的接地比压,履带板会对其底部的土壤进行滚压,将土壤中的空气和水分进行挤压,缩短土粒之间的距离,增大土壤的密度,提高其承载能力[16]。LY352J沙漠履带式运输车底盘主要由绞盘机、驾驶室、发动机、张紧轮、支重轮、三角履带和后桥箱组成,沙漠履带式履带车底盘整机结构如图1所示。
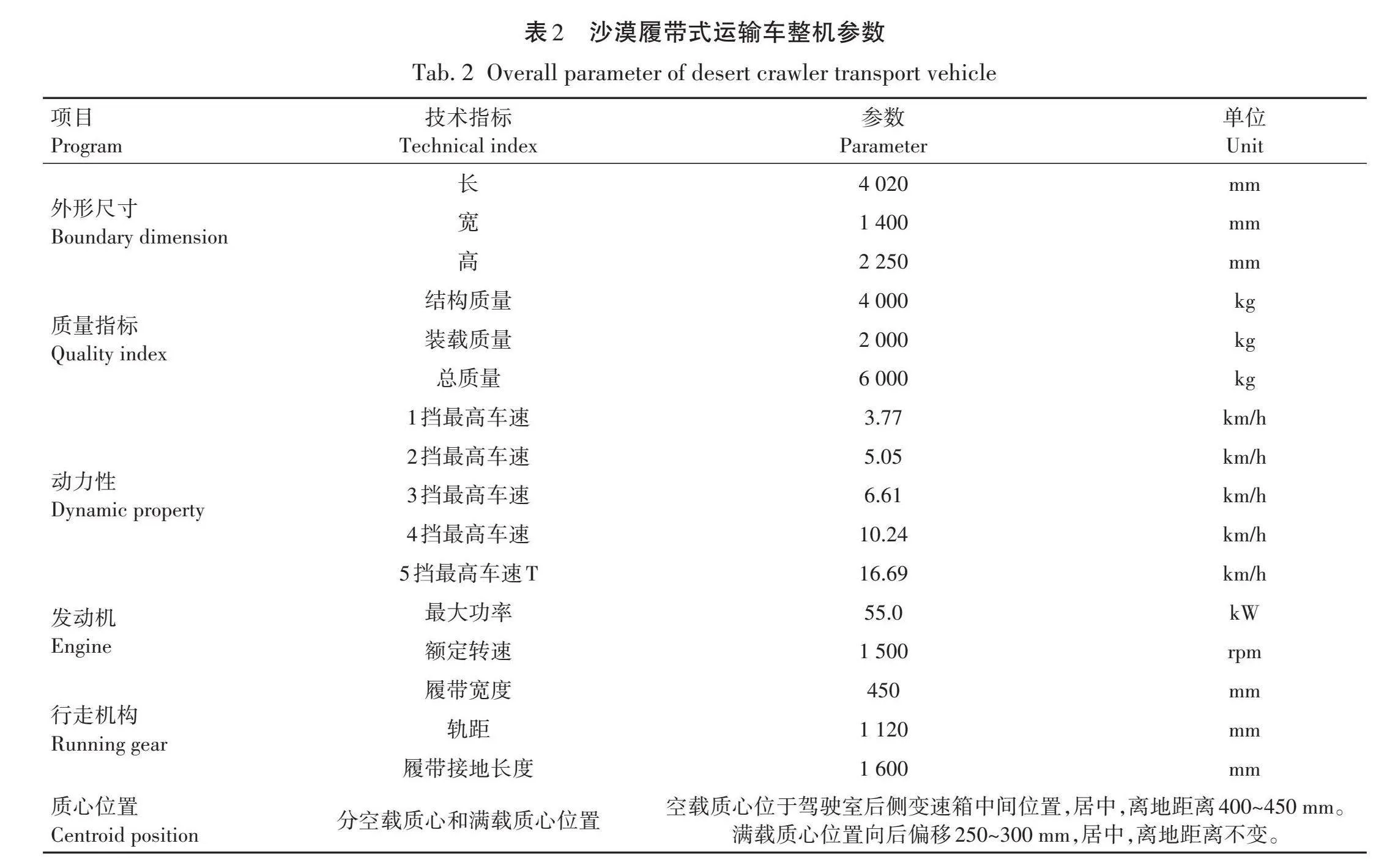
沙漠履带式运输车外形尺寸、质量指标和动力性等整机参数见表2。
Centroid position 分空载质心和满载质心位置 空载质心位于驾驶室后侧变速箱中间位置,居中,离地距离400~450 mm。满载质心位置向后偏移250~300 mm,居中,离地距离不变。
2 仿真分析
2.1 车辆虚拟样机的建立
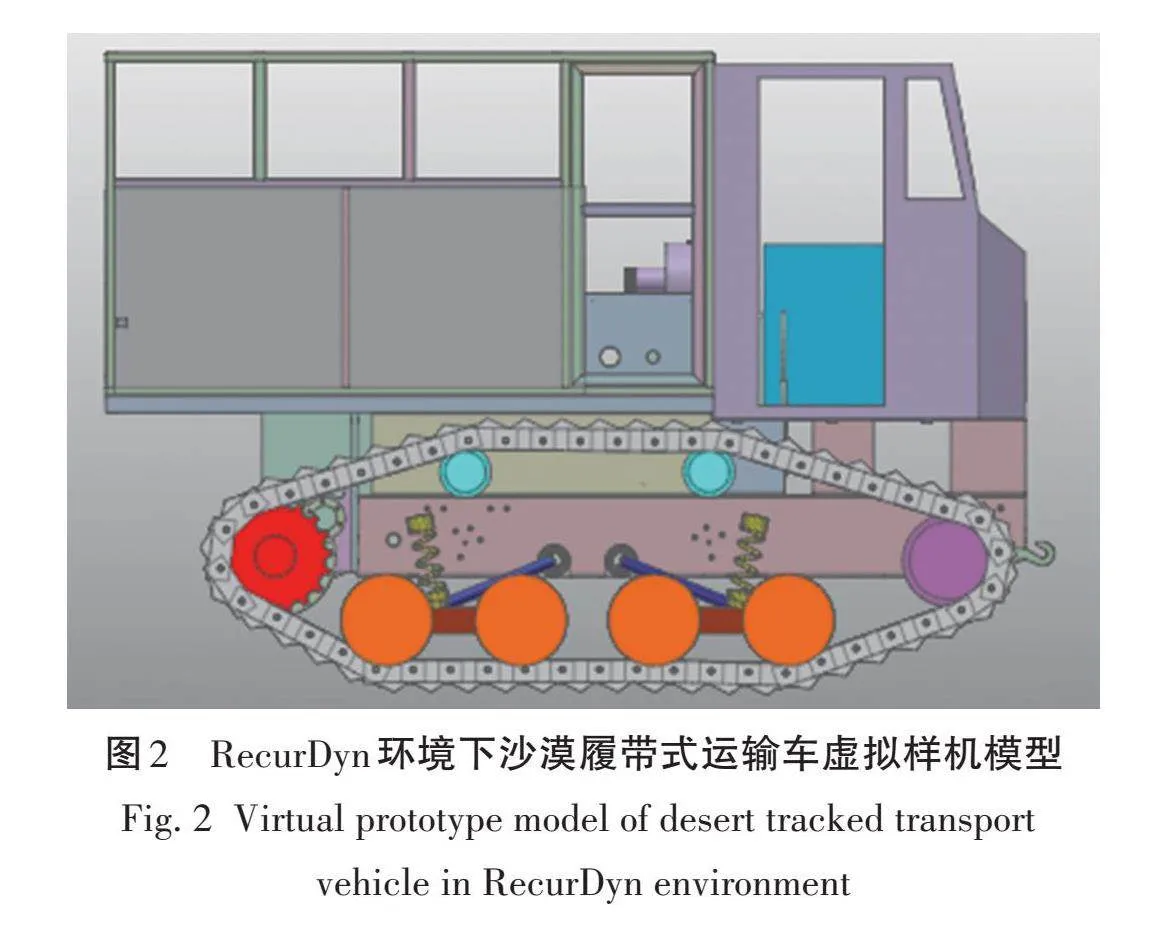
沙漠履带式运输车整车模型分为2个部分:车体模型和底盘机构模型。车体模型是在底盘结构模型基础上增加的配重,模拟仿真负载情况下车辆的通过性。整车模型用Creo软件进行建模,另存为IGES格式,然后导入到RecurDyn(Recursive Dynamic)动力学仿真软件中。导入后对行走机构上的支重轮、拖轮等按照实际情况施加正确的约束关系,得到虚拟样机模型,如图2所示。
沙漠履带式运输车行走机构包含左右两侧履带系统,每侧履带系统由1个驱动轮、1个张紧轮、4个支重轮和56节履带板组成。驱动轮高置,支重轮通过悬架装置连接在车体上。
2.2 多体动力学仿真分析
2.2.1 车辆合适预张紧力的分析
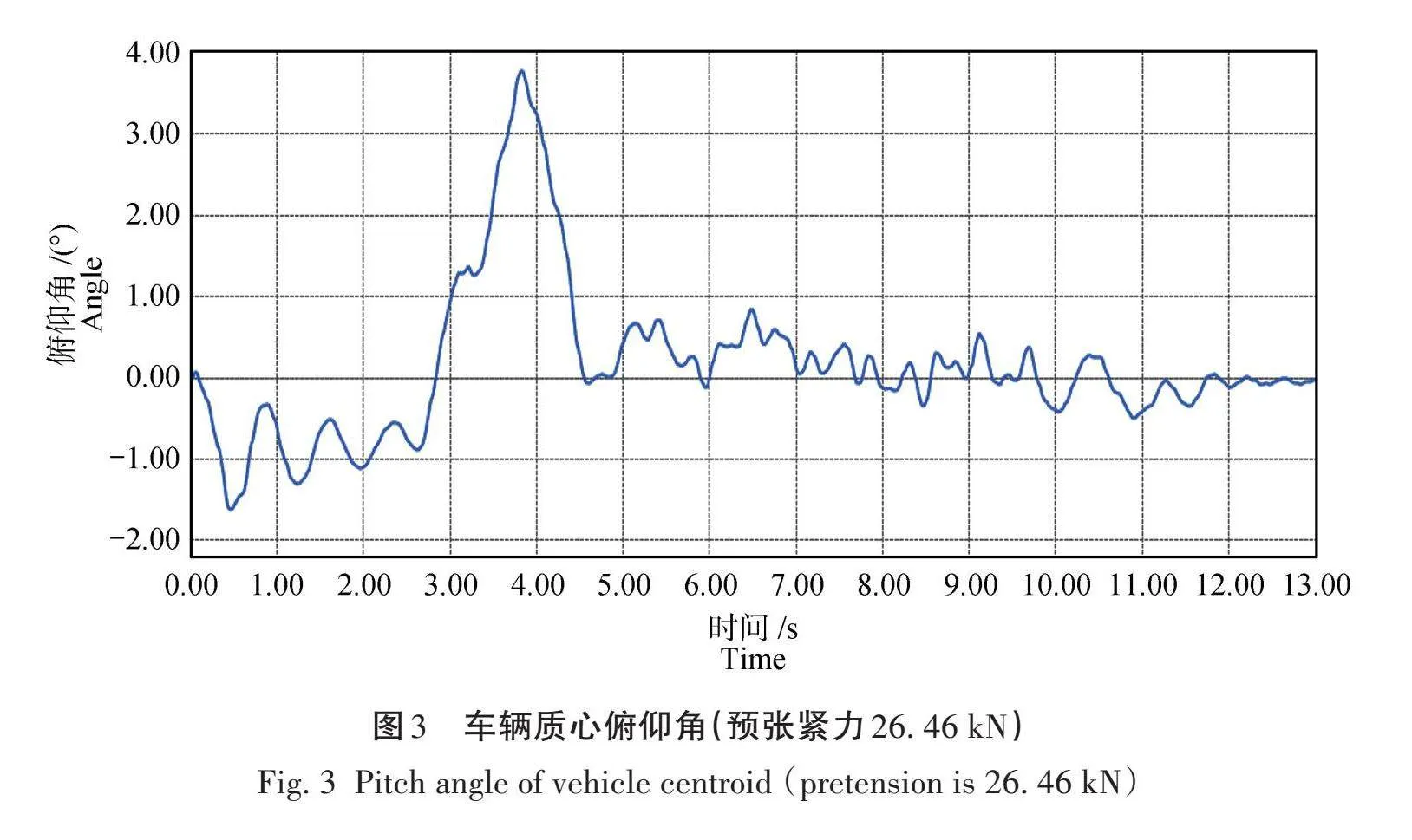
对沙漠履带式运输车的履带施加合适的预张紧力,能够降低车辆行驶过程中履带振动,以确保在不同的驾驶条件下履带轨道不会脱离车轮。对于履带式车辆的预张紧力,通过经验公式[17]来计算,选取张紧力为26.46 kN(车重45%)。设置仿真时间为13 s,步长为800。仿真得到预张紧力为26.46 kN(车重45%)情况下的车辆质心俯仰角和横摆角速度,如图3和图4所示。
车辆底盘的俯仰角可以用来表示车辆的平顺性[18]。由图3可得,车辆质心初始波动比较大,即车辆颠簸幅度较大,5 s后波动趋于平稳,说明车辆平稳行驶通过;图4表示在该张紧力下,车辆的横摆角速度也较为平稳。因此,将履带预张紧力设为26.46 kN(车重45%)可以满足车辆的正常运行,可作为常用预张紧力进行仿真分析。
2.2.2 直行状态下仿真
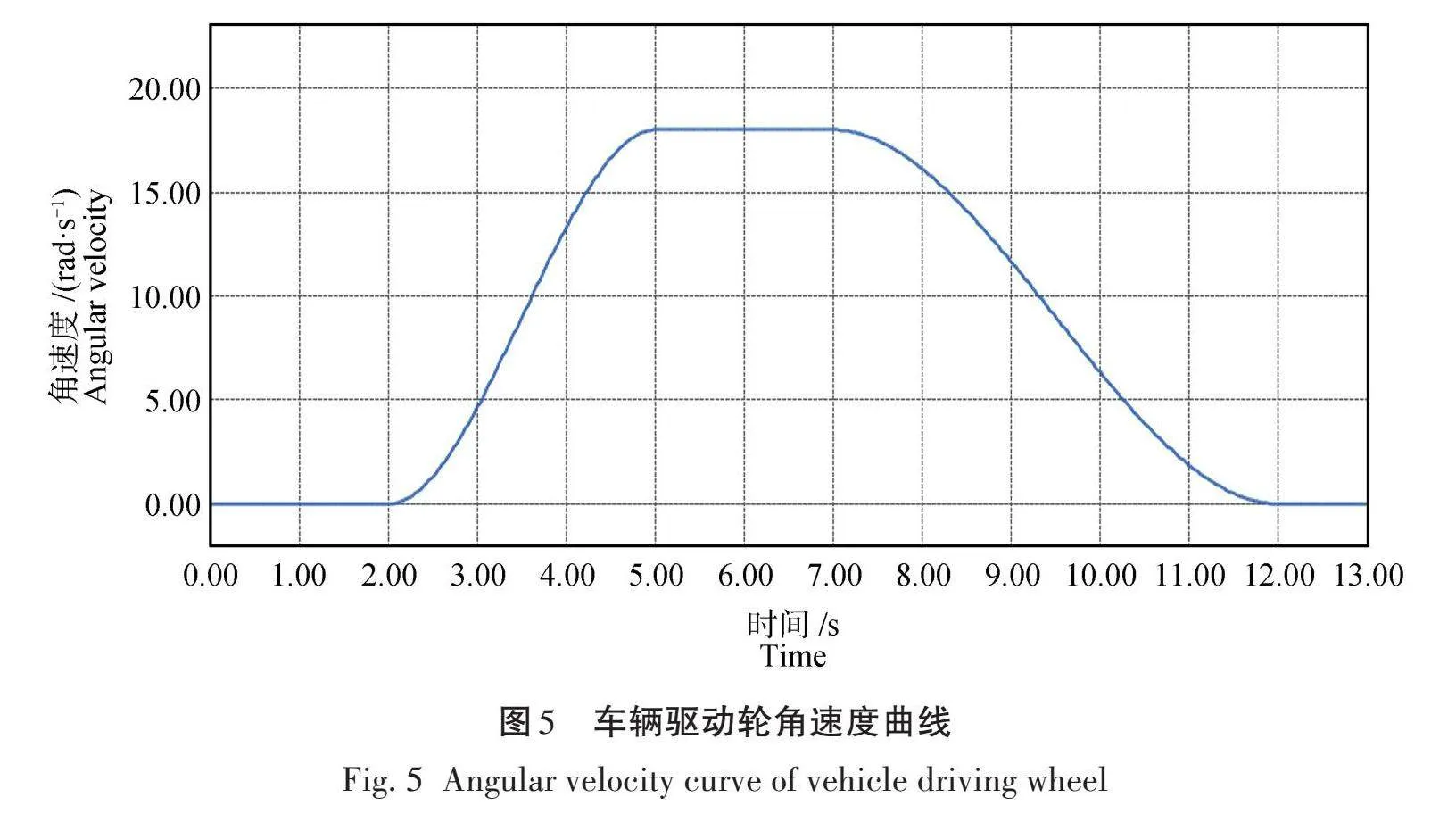
将沙漠履带式运输车的直线工作状态的动态模拟应用于驱动轮,以保证车辆质心的稳定[19]。选择Step函数[20]作为速度驱动辅助,驱动轮Step函数设置如下:-step(time,2,0,5,18),step(time,7,0,12,-18),履带预张紧力选择26.46 kN(车重45%),设置仿真时间为13 s,步长为800。此处模拟了加速、匀速和减速的3个变速特性,履带式沙漠运输车驱动轮角速度仿真结果如图5所示,最大角速度最终趋向于18°。
2.2.3 爬坡状态下的仿真
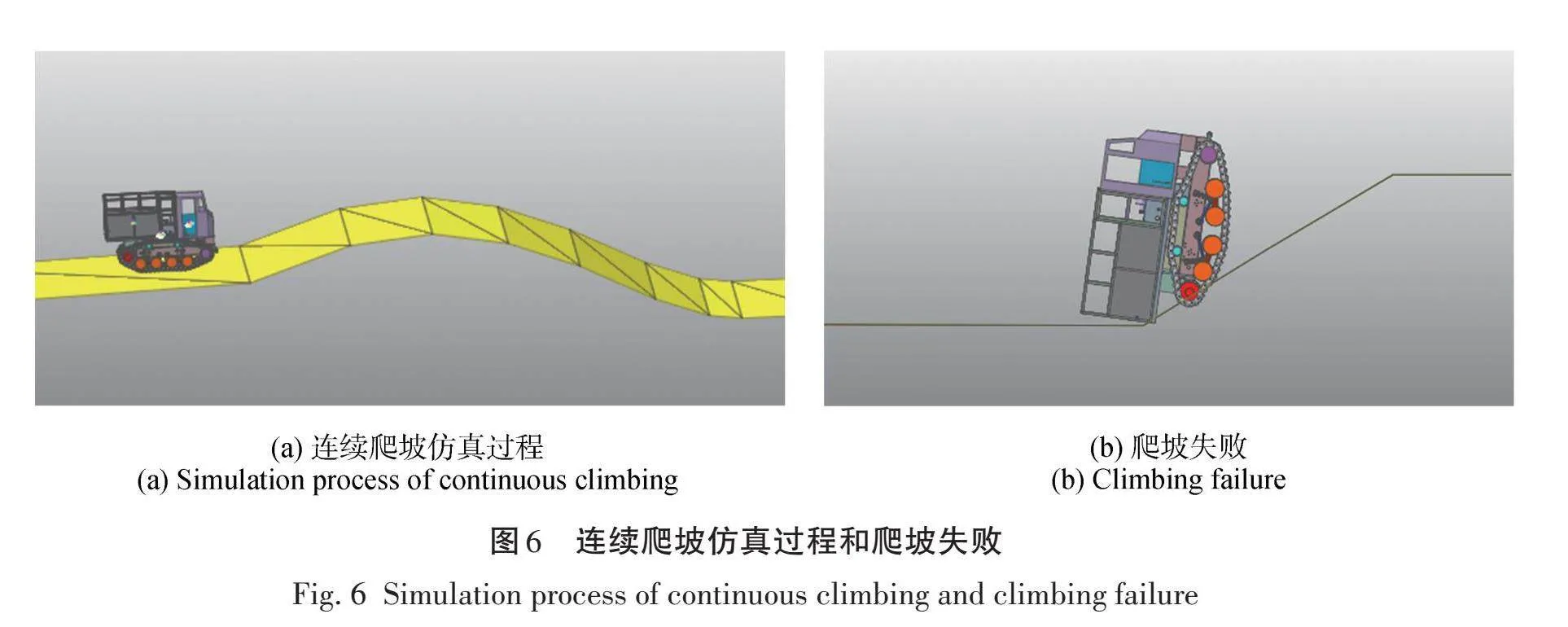
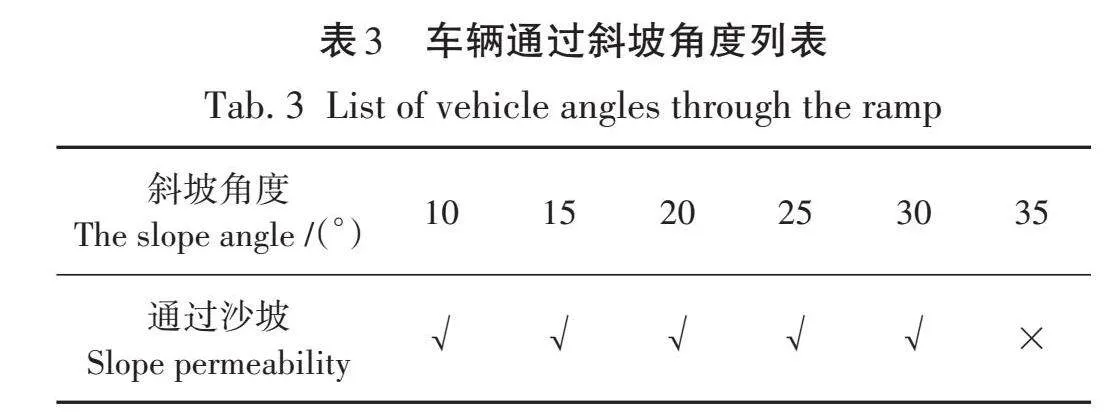
沙漠中的沙丘是连绵起伏的,因此有必要模拟运输车虚拟样机的爬坡性能,考虑到爬坡时车辆需要大的牵引力,在爬坡全过程中为避免翻车的出现,采用低档位进行爬坡[21], 翻越不同角度的沙坡。车辆连续爬坡仿真过程和爬坡失败如图6所示。
为了仿真出车辆所能攀爬的最大角度,坡度分别设置为10°、15°、20°、25°、30°、35°,经过模拟得到见表3,车辆最大爬坡角度为30°。
2.2.4 转向状态下仿真
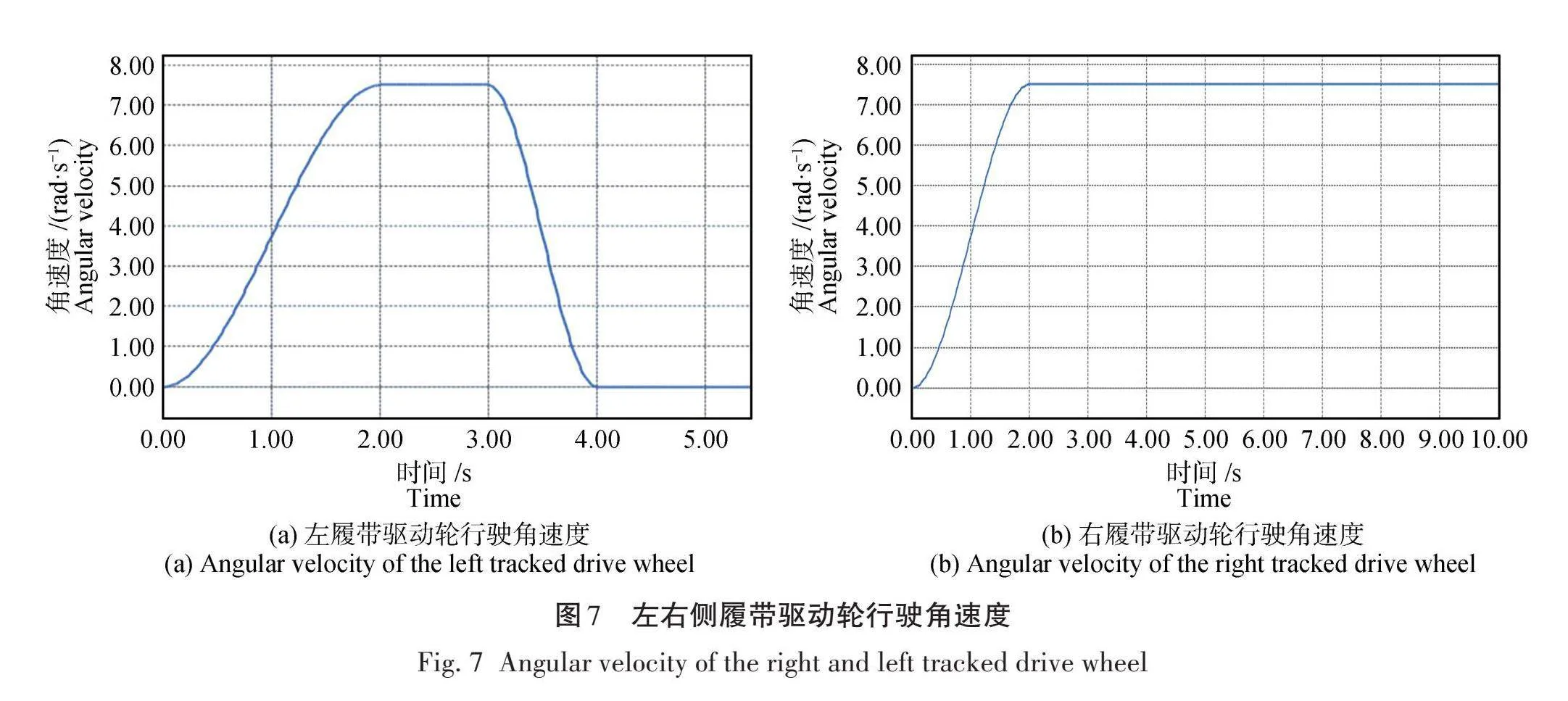
为了保证车辆行驶过程中的稳定性,避免履带产生碰撞和断裂[22],车辆要减速过弯,在转弯前会行驶一段路程。此处对左右两侧履带设置不同的运动约束,左侧履带函数设置为:step(time,0,0,2,-7.5);右侧履带函数设置为:step(time,0,0,2,-7.5)+step(time,3,0,4,7.5),实现差速转弯,仿真时间为10 s。左右侧履带驱动轮行驶角速度如图7所示。
沙土路面左右两侧履带主动轮转矩仿真结果如图8所示。在第3秒时,外侧履带力矩开始增大,到第6秒后趋向稳定。这说明履带运输车在转向过程中,两侧履带驱动轮受不同的力矩驱动,且两侧履带存在力矩差,外侧履带力矩大于正常行驶的力矩。尽管内侧履带被设定为0°的角速度,但是由于在转向过程中内履带和地面之间的摩擦,其扭矩基本上保持在7 500 000 N·mm的稳定水平。
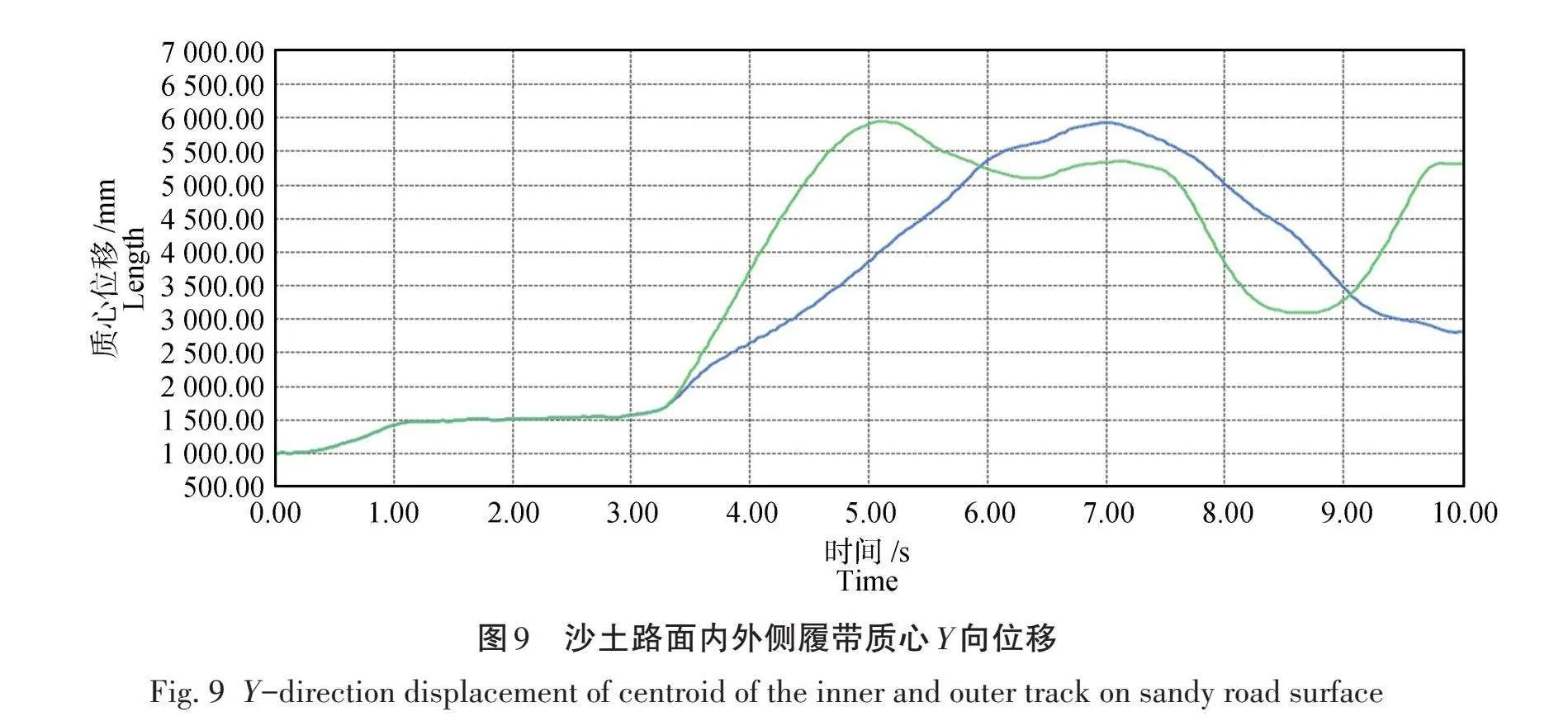
车辆在沙土路面左右两侧履带Y向质心位移如图9所示。在转向过程中外侧履带具有比内侧履带更大的沉陷量,且位移差为36 mm。由向心力(R)公式(13)可知
R=mw^2 r (13)
式中:m为履带车辆质量;ω为角速度;r为转弯半径。
内侧履带的质量和角速度与外侧履带相同,而外侧履带转弯半径却比内侧履带大,因此外侧履带更容易受到大的向心力,因此沉陷量也更多。导致在沙土路面转弯时,车辆会出现横向倾斜状态,容易出现失稳的现象,需要低速转向[23]。
3 实车试验
项目组在大庆杜尔伯特试验场分别进行了车辆直行、爬坡和转向试验。图10为试验沙漠履带式运输车试验样机及试验后沙地地面。通过利用动态扭矩传感器来储存记录传动轴输出角速度,利用光电传感器转速测量系统来进行两侧履带的转速测量,采用美国国家仪器测试系统来对整个试验过程的数据进行采集,试验过程中同步记录两侧履带转速、角速度等相关数据。
3.1 直行试验
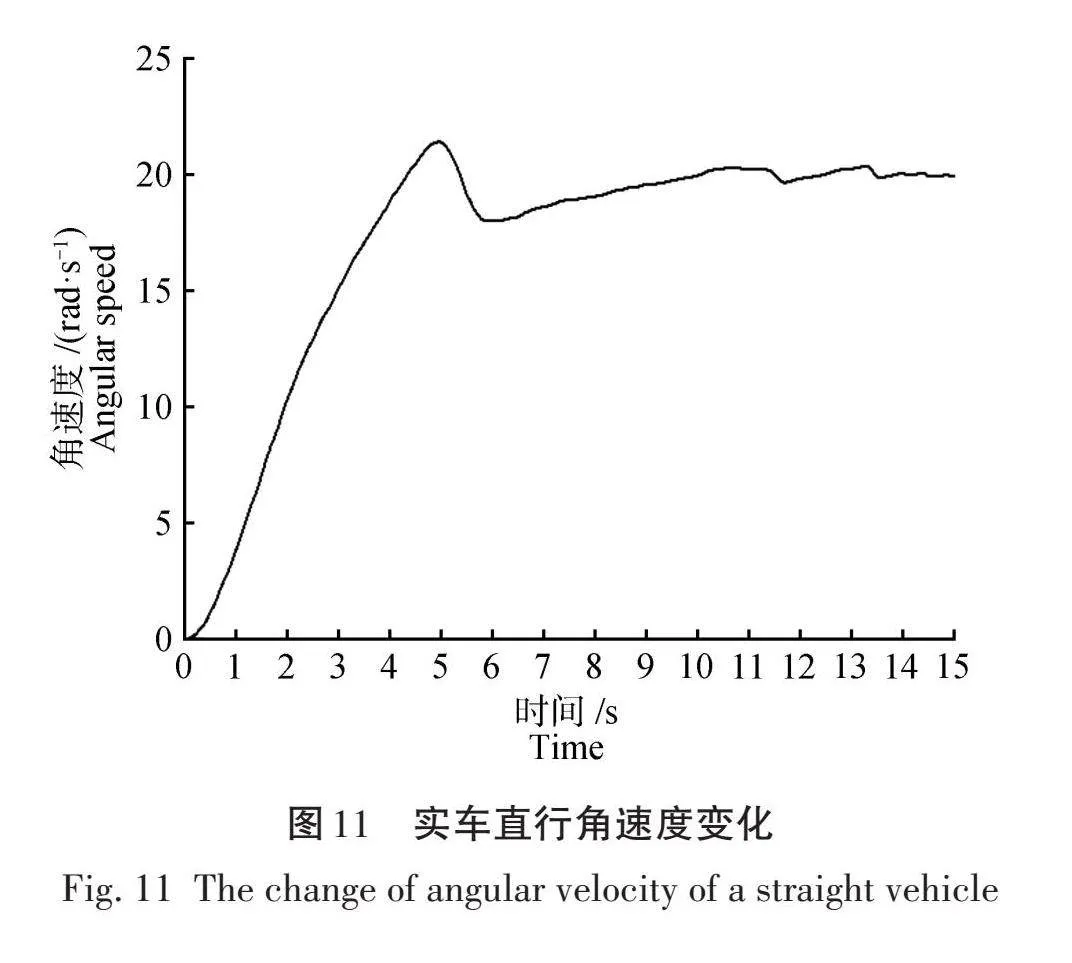
对沙漠履带式运输车(LY352J)以2挡(v=6.64 km/h)的速度进行稳速直行时驱动轮回转的角速度进行测试,角速度随时间变化测试结果如图11所示。由图11可以看出,车辆在直行时其最大角速 度约为 22 rad/s,而最后趋于20 rad/s,同仿真结果18 rad/s相比峰值有所增加,误差原因为:车辆直行仿真模拟完全是在理想化的状态下进行,而在实际试验行驶时车辆下陷程度较低,驱动轮回转的角速度相应增大。
3.2 爬坡试验
为验证履带车辆的最大爬坡坡度及爬坡性能的稳定性,分别使用1挡、2挡、3挡来进行爬坡试验,试验中采用了不同角度的坡度,记录在此坡度下不同挡位所使用的爬坡时间。
履带车爬坡试验如图12所示,由图12(b)可见,当沙漠履带式运输车以1挡进行爬坡时,随着爬坡所需时间的增大,爬坡坡度也在不断增大,当坡度达到28°时,履带式运输车达到最大爬坡角度;而当履带运输车以2挡、3挡进行爬坡时,由于牵引力等功率原因,爬坡坡度逐渐减小,试验所得实际最大爬坡坡度与仿真模拟试验所得的30°相比,误差率为7%,误差的原因是:车辆进行模拟仿真所得的最大爬坡角度是在理想条件下得到的,而在实际情况下由于试验地面与土壤仿真模拟环境相比土壤湿度较大,导致车辆在爬坡过程中产生的推力较小。
3.3 转向试验
为了验证沙漠履带式运输车在松软路面上转向性能,以2挡(v=6.64 km/h)用大约18 m的转弯半径进行转向,记录下高、低速侧履带速度及其牵引力、制动力随时间变化的试验结果,测试结果如图13和图14所示。整体可见,车辆在转向过程沙漠履带式运输车速度和牵引力、制动力变化较稳,整体表现良好。
4 结论
本项目研制了一种配备三角履带的LY352J型沙漠履带式运输车,并对该车在沙漠松软地面牵引通过性进行了理论分析,运用Creo和RecurDyn 进行多体动力学仿真分析,并在试验场地对试验样机进行了实车试验,理论分析、仿真和试验结果都表明运输车在松软地面具有良好的通过性能。具体结论如下。
1)设计了一种LY352J沙漠履带式运输车,完成包括整体的底盘结构(四轮一带)、动力系统(发动机)、履带板的设计,使之可以应用于复杂的沙漠环境。根据运输作业需求及牵引理论计算结果,将履带板的宽度设计为450 mm,整车重量设计为6 000 kg,计算出履带式运输车在沙漠环境下的最大切线牵引力为32.662 kN,根据沙漠通过性评价指标得出车辆在沙漠中具有良好的性能表现。
2)运用RecurDyn多体动力学分析软件,对适用沙漠地形的履带式运输车辆底盘进行虚拟样机分析。通过设置不同速度特性,对26.46 kN(车重45%)的预张紧力下满载情况下进行直行仿真,得出了在选定预张紧力下比较适合车辆正常运行,对车辆上坡性能的仿真显示,车辆可以达到的最大上坡坡度为30°。车辆在沙土路面转弯较为稳定,但在转弯时车辆易出现倾斜引起横向失稳,需降低行驶速度。
3)在大庆杜尔伯特试验场地进行实车直行、爬坡、转向性能测试。试验结果显示,直行时角速度变化趋于20 rad/s,同仿真结果18 rad/s相比峰值有所增加,最大爬坡坡度为28°,与仿真模拟试验所得的30°相比,误差率为7%,转向时高、低速侧履带速度及牵引力、制动力较为稳定,表明车辆转向时车况较稳,且能够弥补轮式车辆下陷的弊端,具有良好的表现性能。
【参 考 文 献】
[1] 常茜,鹿化煜,吕娜娜,等.1992-2015年中国沙漠面积变化的遥感监测与气候影响分析[J].中国沙漠,2020,40(1):57-63.
CHANG Q,LU H Y,LÜ N N,et al.Variation of desert and sandy field in China on the basis of remote sensing analysis and the relationship with climate change during 1992-2015[J].Journal of Desert Research,2020,40(1):57-63.
[2] 徐锐良,罗跃辉.车辆通过性研究现状及趋势[J].拖拉机与农用运输车,2013,40(5):5-8.
XU R L,LUO Y H.Research status and trend of vehicle trafficability[J].Tractor & Farm Transporter,2013,40(5):5-8.
[3] VIDAL FRANCO J M,PINTO E G F,SCHAEFER G.Use of vehicle dynamic simulations to define the best axles configuration for a 6×6 military vehicle[J].SAE Technical Paper Series,2008,36:1004.
[4] 杨超珍.大履刺履带的下陷性能研究[J].宁波工程学院学报,1995,2(1):44-50.
YANG C Z.A Study on sinking property of big track shoe[J].Journal of Ningbo University of Technology,1995,2(1):44-50.
[5] 孔江生,刘建中,王建民.履刺在干沙区作业时的效能分析[J].农业机械报,2005,36(2):35-38.
KONG J S,LIU J Z,WANG J M.Efficiency of track layer arista working on desert soil [J].Journal of Agricultural Machinery,2005,36(2):35-38.
[6] 李军,李灏,宁俊帅.履带车辆松软路面通过性分析[J].农业装备与车辆工程,2010,226(5):3-6.
LI J,LI H,NING J S.Analysis of the mobility of tracked vehicle on soft soil[J].Agricultural Equipment & Vehicle Process,2010,226(5):3-6.
[7] 李军,张宇,周靖凯,等.大履刺履带沉陷性能预测方法研究[J].农业装备与车辆工程,2013,51(4):33-36.
LI J,ZHANG Y,ZHOU J K,et al.Study on prediction method of the sinkage of track with big shoes[J].Agricultural Equipment & Vehicle Engineering,2013,51(4):33-36.
[8] 李火青,金莉莉,赵佳伟,等.荒漠土壤成分对陆面过程的影响[J].干旱区研究,2020,37(1):18-25.
LI H Q,JIN L L,ZHAO J W,et al.Effects of desert soil composition on land surface processes[J].Arid Zone Research,2020,37(1):18-25.
[9] 李幼德,王志浩.软弱地面上汽车牵引系数和牵引效率[J].汽车工程,1993,15(4):206-211.
LI Y D,WANG Z H.Coefficient of traction and tractive efficiency of automobiles on weak terrain[J].Automotive engineering,1993,15(4):206-211.
[10] 孟祥政,邢俊文,王亮.三角形橡胶履带车轮式越野车通过性研究[J].机械工程师,2012(11):16-18.
MENG X Z,XING J W,WANG L.Research on the passability of Triangle-type off-road vehicle with rubber Track Wheels[J].Mechanical Engineer,2012(11):16-18.
[11] 刘振生,孔江生,李菊梅.干沙性土壤区履带附着能力分析[J].农机化研究,2004(3):250-252.
LIU Z S,KONG J S,LI J M.The adhere ability of pedrail when working on desert soil[J].Journal of Agricultural Mechanization Research,2004(3):250-252.
[12] 高行方.拖拉机履带长宽比对行走阻力的影响[J].农业机械学报,1963(Z1):15-23.
GAO X F.The influence of the ratio of length to width of the tractor track on the walking resistance[J].Journal of Agricultural Machinery,1963(Z1):15-23.
[13] BEKKER M G.地面-车辆系统导论[M].北京:机械工业出版社,1978.
Bekker M G.Introduction to ground vehicle system[M].Beijing:China Machine Press,1978.
[14] KARL T.工程实用土力学[M].北京:水利电力出版社,1960.
KARL T.Engineering practical soil mechanics[M].Beijing:Water Conservancy and electric power press,1960.
[15] 李建强.湿地推土机履带板的改造[J].工程机械与维修,2002(1):93.
LI J Q.Transformation of track shoe of bulldozer for wetland[J].Engineering Machinery and Maintenance,2002(1): 93.
[16] 卞美卉,张洋,杜志岐.履带车辆履带预张紧力对平顺性的影响与仿真[J].车辆与动力技术,2019(1):34-37.
BIAN M H,ZHANG Y,DU Z Q.Influence of track pretension on ride comfort of tracked vehicles[J].Vehicle & Power Technology,2019(1):34-37.
[17] 崔雪斌,张宏,石涛.基于链环不均匀系数的履带车辆行驶平顺性分析[J].工程设计学报,2018,25(1):71-78.
CUI X B,ZHANG H,SHI T.Ride comfort analysis of tracked vehicle based on nonuniform coefficient of link[J].Chinese Journal of Engineering Design,2018,25(1):71-78.
[18] 张广晖,许明贤,孟庆凯,等.三角履带轮式森林消防车设计与分析[J].消防科学与技术,2019,38(7):983-984,985-987.
ZHANG G H,XU M G,MENG Q K,et al.Design and analysis of triangle tracked wheel forest fire truck[J].Fire Science and Technology,2019,38(7):983-984,985-987.
[19] MĘŻYK A,CZAPLA T,KLEIN W,et al.Numerical simulation of active track tensioning system for autonomous hybrid vehicle[J].Mechanical Systems & Signal Processing,2017,89:108-118.
[20] 李阳,成凯,任鹏.基于RecurDyn的铰接式履带车辆爬坡性能分析[J].煤矿机械,2011,32(7):93-95.
LI Y,CHENG K,REN P.Analysis about grade ability of articulated tracked vehicle base on RecurDyn [J].Coal Mine Machinery,2011,32(7):93-95.
[21] 张雪,林颖,姚丽,等.基于ADAMS蟒式双节履带车的建模与仿真研究[J].林业机械与木工设备,2018,46(6):25-27.
ZHANG X,LIN Y,YAO L,et al.ADAMS-based modeling and simulation study on python-type double-section tracked [J].Forestry Machinery & Woodworking Equipment,2018,46(6):25-27.
[22] 梁树星.车辆侧滑与侧翻的力学分析与避免方法[J].黑龙江科学,2017,8(4):168-169.
LIANG S X.Mechanics analysis and avoidance method of vehicle sideslip and rollover[J].Heilongjiang Science,2017,8(4):168-169.