基于改进YOLOv3目标检测算法的船舶运载货物自动识别研究
2024-10-09 00:00:00侯国佼孙荣肖圣魁李雯张栋
数字通信世界 2024年9期





摘要:船舶货物自动识别高精度数据获取难,影响检测性能。该文利用弱监督至全监督框架,结合改进算法构建组合框架,平均识别精度达32.0%,定位精度达73.8%,高于对比方法。该框架在弱监督环境下表现优异,适用于船舶货物自动识别。
关键词:YOLOv3;弱监督;船舶运载;候选区域
doi:10.3969/J.ISSN.1672-7274.2024.09.001
中图分类号:TP 391.41 文献标志码:A 文章编码:1672-7274(2024)09-000-03
Research on Automatic Identification of Ship Cargo Based on Improved YOLOv3 Object Detection Algorithm
HOU Guojiao1, SUN Rong1, XIAO Shengkui1, LI Wen1, ZHANG Dong2
(1. The Navigation Authority of Yangtze Gorges, Yichang 443002, China;
2. Hunan Tianxiakuan Information Technology Co., Ltd., Changsha 410000, China)
Abstract: The difficulty in obtaining high-precision data for automatic identification of ship cargo affects the detection performance. This study utilizes a weak supervision to full supervision framework combined with improved algorithms to construct a combined framework. The average recognition accuracy reaches 32.0%, and the positioning accuracy reaches 73.8%, which is higher than the comparison methods. This framework performs excellently in a weak supervision environment and is suitable for automatic identification of ship cargo.
Keywords: YOLOv3; weak supervision; ship transportation; candidate region
0 引言
在船舶货物自动识别领域,视觉图像的检测识别扮演着核心角色,而人工智能算法的兴起为此提供了新的思路[1]。随着技术革新,目标检测算法已广泛应用于船运调度系统,显著减少了货物分拣与调度的时间与误差,实现了高效智能化与自动化处理[2]。在众多算法中,基于监督学习的目标检测算法逐渐成为航运调度的主流技术。尽管现有监督学习方法在多种船舶调度场景中表现出色,但构建高精度、全监督特征的检测模型仍需大量带有真实框架和分类标记的样本[3-4]。双阶段方法虽有效,但实际应用复杂且耗时低效,而单阶段方法,如YOLO系列算法,则较好地解决了这一问题[5-6]。
1 基于改进YOLOv3与PGE-L算法的船舶运载货物自动识别分析
1.1 基于PGE-L算法的候选区域生成研究
为解决航运船舶运载货物自动识别的高精度数据集获取困难问题,本文采用弱监督到全监督的基准框架,结合改进候选域算法和改进YOLOv3形成组合框架,实现船舶运载货物自动识别。考虑到实际的航运调度运用场景,将弱监督到全监督(Weak Supervision to Full Supervision,W2F)架构作为实际分析的基线,其架构整体流程示意图如图1所示。
在图1中,整体流程始于输入已标注的图像等级示例数据。随后,将弱监督深度神经网络(WSDNN)与在线实例分类器优化(OICR)策略相结合,生成多尺度候选域,并通过有标签的图像样本进行训练。为解决紧包框分数过低导致学习方向偏差的问题,引入了PGE算法。该算法生成的紧包框被用作伪标签,进而仅需将这些紧包框送入强监督检测器进行训练。在两级监督目标检测阶段,利用区域建议网络(RPN)进行进一步筛选,此过程依据伪地面实况改编算法(PGA)针对PGE算法传递的候选域进行,并对模型进行训练。针对PGE算法在交叠目标探测上的不足,研究进行了改进,提出了PGE-L算法。该改进主要针对现有非极大抑制算法及其变体受交并比值限制的问题,通过计算L值来替代交并比值,衡量候选域间的交并位置信息。L值通过评估两个候选域间的相似度来确定其实际的交并情况,从而提升了算法在交叠目标探测上的准确性。因此,假定存在两个候选域,则其实际位置信息左上角与右下角的相关坐标表达如式(1)所示。
(1)
式中,和分别表示两个候选域;、和、分别表示候选域和左上角的横纵坐标;、和、为右下角的横纵坐标。L值的计算表达如式(2)所示。
(2)
式中,表示两个候选域的L值,即L1范数。原始信息标准化处理表达如式(3)所示。
(3)
式中,表示标准化处理后的值;表示原始数据量。相应转换函数表达如式(4)所示。
(4)
式中,表示附加L值的权重分数;表示分类置信度。在PGE-L算法的工作流程中,首先使用L算法替代非极大抑制,不依赖交并比,并在紧包框产生时立即删除。在没有紧包框的条件下,使用PGE算法的步骤,通过循环迭代合并较大区别框,作为目标的最小外包矩形框架。
1.2 改进YOLOv3结合PGE-L算法的RPY框架分析
在PGE-L算法的基础上,本文利用注意力机制来对弱监督检测器进行优化设计,以此构建一种无须进行相关预训练的用于弱监督检测的在线特征提取方法,本文将其命名为Rre-Attention。同时,将其与PGE-L算法和改进的YLOLv3模型进行组合,由此构成RPY框架。研究通过利用引入注意力分块的方法,使模型只保留被关注对象的所有有价值的信息,从而实现对网络资源的合理配置并提高模型的性能,进而使弱监督检测器更高效地实现对整个目标的检测。改进后的弱监督检测器模型的架构如图2所示。
从图2可知,改进后的弱监督检测器模型巧妙地引入了提示注意机制,该机制运用选择性检索策略生成候选点,并整合关注区域(ROI)与增强特性图,进而导出ROI特征图。此模型还融合了引导注意力分块与ROI池化后的特征图,以提炼ROI特征。同时,模型摒弃了原有的回归分支,避免了对多个实例性分支的优化,转而采用PGE-L算法对候选区域进行精细调整与过滤。本文选用YOLOv3作为强监督检测器,并辅以PGA算法进行微调,旨在提升目标检测的精度。在航运调度系统中,模型首先利用Rre-Attention生成图像级候选点,再经PGE-L算法过滤,得到紧包框作为实际对象标记,从而实现高效、精准的货物识别与处理。
2 RPY框架在船舶运载货物自动识别中的实验分析
2.1 RPY框架各部分实验验证
为了验证RPY框架的有效性,本文对每个模块进行实验验证。实验中选择数据对象类2007/2012(Visual Object Classes,VOC 2007/2012)两个数据集(分别命名为数据集1和数据集2)。数据集1选择5 000张图片作为训练集,数据集2选择11 000张图片作为训练集,而评价指标选择全类平均精确度(mean Average Precision,mAP)和平均定位准确率(CorLoc)。其中,在引导注意力机制的影响分析实验中,将引入引导注意力机制的相关弱监督检测模块设定为G,其结果如图3所示。
图3中,1~9分别表示数据集中的不同图片。数据集1中G模块所有图片中最高识别检测准确率为47.0%,最低准确率为13.9%,而mAP值为32.0%,相对于W2F来说实际性能增加了1.6%,相对于OICR来讲实际性能增加了3.1%。而在CorLoc对比中,G模块的CorLoc值达到55.9%,显著高于OICR的51.1%和W2F的53.5%。在数据集2中G模块的mAP值和CorLoc值分别为34.2%和56.7%,均高于对比模块。研究引入的G模块对于航运调度系统而言基本达到实际满意程度。PGE-L算法不仅筛选精度优于PGE,而且在实际的筛选速度上也显著优于PGE,表明其具备有效性。强监督检测器的影响分析结果如图4所示。
图4中,数据集1中YOLOv3-PGA模块后的RPY框架的mAP值为53.7%,高于使用YOLOv3模块的框架的43.2%和采用快速循环神经网络(Faster Recurrent Neural Network,Faster R-CNN)的50.5%。其CorLoc值为73.8%,显著优于对比方法的58.6%和65.5%。YOLOv3-PGA模块对RPY框架的贡献是十分明显的,表明了本文对YOLOv3算法进行改进的做法具备有效性。
2.2 RPY框架整体实验验证分析
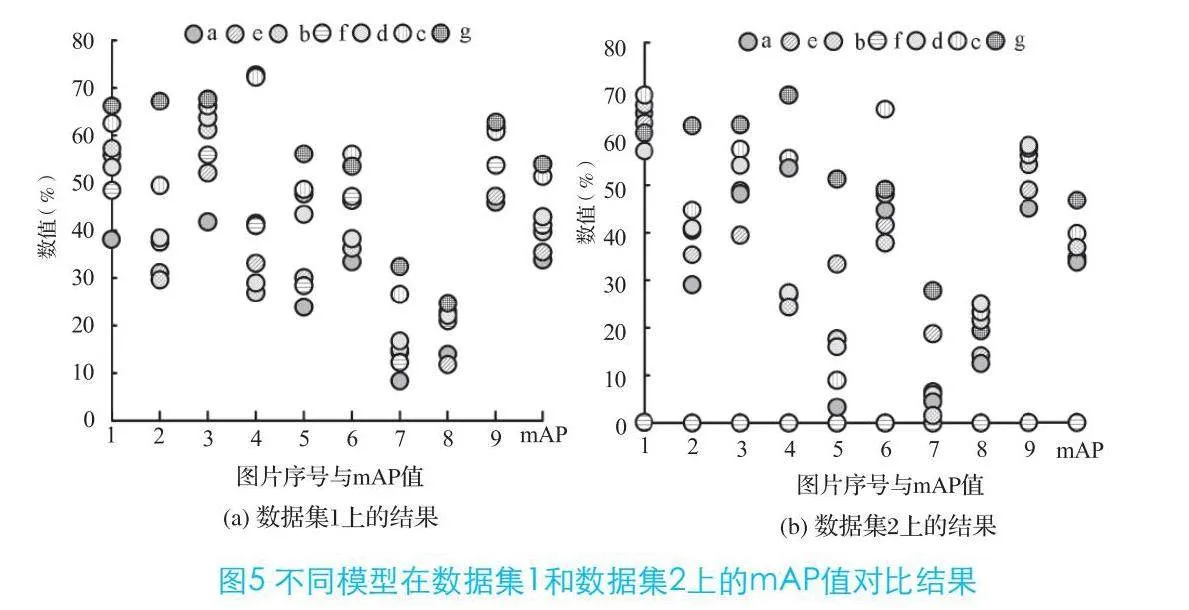
对比模型包含图中的WSDDN、OICR以及W2F,并额外引入提议集群学习(Proposal Cluster Learning,PCL)、弱监督定位的上下文感知深度网络模型(Context-Awar-e Deep Network Models for Weakly Supervised Localization,ContextLocNet)以及弱监督级联卷积网络模型(Weakly Supervised Cascaded Convolutional Networks,WCNN),将mAP值设定为a~f,RPY设定为g。不同模型的mAP值对比结果如图5所示。
图5中,数据集1中研究提出的RPY的mAP值为53.7%。数据集2中RPY的mAP值为49.5%。W2F和RPY均是从弱监督过渡到强监督的弱监督检测器,二者的数值显著优于传统的相关弱监督检测模型。因此可以判定从相关弱监督中生成相应的伪标注并将其输入强监督中,以此来进行相应回归的解决思路在理论上是可行且有效的。
3 结束语
针对当前航运调度系统模块中船舶运载货物自动识别中的高精度数据集获取十分困难的问题,本文利用弱监督到全监督的基准框架与改进YOLOv3来构建了RPY框架。本文构建的组合框架在船舶运载货物自动识别中具备有效性和实用性。
参考文献
[1] 王婕佳.贸易便利化对我国跨境电商出口的实证研究[J].经济学,2021(4):60-63.
[2] Cheah L, Huang Q. Comparative carbon footprint assessment of cross-border e-commerce shipping options[J]. Transportation Research Record, 2022(1): 584-595.
[3] 周凌翱.基于ARM的高精度船舶恒温运输系统[J].舰船科学技术, 2022(13):162-165.
[4] 范晓飚,卫泽亮,程志友,等.基于AHP的龙门吊船装卸货物作业安全风险分析[J].重庆交通大学学报(自然科学版), 2022(3):143-148.
[5] 黎峰,沈立宁,李健,等.散货船快速改装运载集装箱的系固设计及应用[J].船海工程, 2023(1):30-35.
[6] 许伟,熊卫华.一种改进的轻量级垃圾目标检测算法[J].计算机技术与发展, 2022(2):63-68.