
一种高精度组合式力传感器的结构设计与分析
2024-10-09 00:00:00谢杰
市场监管与质量技术研究 2024年4期


摘要:文中介绍了一种高精度组合式力传感器。该组合式力传感器将三个经溯源的高精度小量程力传感器耦合连接组成一大量程力传感器,对其进行受力分析与实验验证。结果表明,该组合式力传感器可保证在大量程下的准确度,同时具有稳定、可靠的优势。
关键词:高精度;组合式力传感器;大量程
Structural Design and Analysis of a High Precision Combined Force Sensor
XIE Jie 1,2,3
( 1 Fujian Metrology Institute, Fuzhou 350003, Fujian, China )
( 2 Key Laboratory of State Administration for Market Regulation (Force Measurement Test), Fuzhou 350003, Fujian, China )
( 3 Fujian Provincial Key Laboratory of Force Measurement, Fuzhou 350003, Fujian, China )
Abstract: This paper introduces a high-precision combined force sensor. The sensor combines three traceable, high-precision and small-range force sensors to form a large-range force sensor, which is analyzed and verified by experiments. The results show that the combined force sensor can guarantee the accuracy in a large range, and has the advantages of stability and reliability.
Key Words: High precision; Combined force sensor; Large-range
0引言
大力值传感器广泛用于汽车制造、冶金、化工、桥梁、建筑、国防等多个行业,其精度高低直接影响生产安全和产品质量。目前,1MN以上力传感器普遍存在方位误差大、稳定性差等问题,在高精度应用场景中,其准确度不能得到有效保证。而高准确度大量程的力传感器,其采购费用极其高昂,对于日常使用来说,成本太高。
针对上述问题,文中提出了一种高精度组合式力传感器,可保证最大量程为3MN力传感器的准确度,达到标准测力仪0.01级要求。
1 设计方案
1.1 设计原理
文中设计采用并联式测量原理,分别将3只力传感器应变片桥路的输入、输出端并联,然后接入信号合成器,测试时力传感器所测得的数据经信号合成器处理后,输入测量仪表,通过测量仪表显示所承受的外部载荷,从而达到力值测量的目的。
但这种传感器并联的方式会产生附加误差,主要是由于传感器的直线度和灵敏度不同,而导致在承受非均布载荷时产生测量误差。因此,消除或减少附加误差的根本途径是通过补偿调整使输出阻抗和输出灵敏度各自保持一致或者选配灵敏度接近和直线度好的传感器。以上是决定传感器性能的一方面,但是,传感器是否合理、规范地安装也是非常重要的保证因素。实际使用中会因为安装对位的偏心,或基础与承载板的不水平等原因,导致传感器受力状态不一致而出现实际意义上的新的“灵敏度”不一致的情况。因此文中选配了3个经溯源且灵敏度接近和直线度较好的高精度小量程力值传感器(C18/1MN),均匀布置安装在法兰盘底座上。采用双层自适应球头结构,在确保静止状态下组合式传感器与力标准机处于同一轴线上的情况下,使其在测试时的受载点可自动对中,受力均匀化,可消除大部分侧向分力。如图1所示,F=F1+F2+F3。
图1 高精度组合式力传感器原理
1.2 结构设计
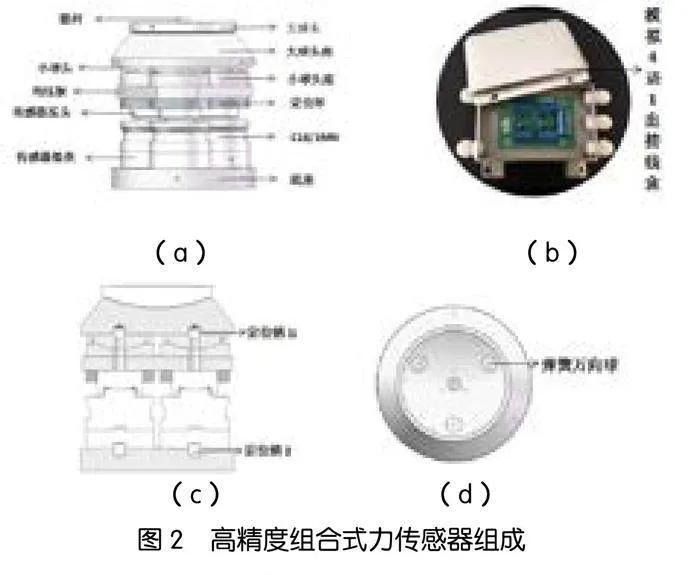
高精度组合式力传感器由提杆、大球头、小球头、均压板、C18/1MN、底板、定位销、弹簧万向球、模拟4进1出接线盒等构成,如图2所示。具体为:3个C18/1MN高精度传感器三等分均匀放置在底座上,通过定位销2连接底座,保持传感器位置不变;定位环固定在均压板上,然后与传感器压头连接,确保传感器位置不会发生偏移;小球头座通过定位销2与均压板确定位置后固定;小球头与大球头座通过定位销1连接;大球头座上以每120°均安装弹簧万向球,可快速自动调整大球头位置,保持在大球头座正中心。由于此组合式传感器在使用时处于静止状态,仅在加载时产生微小变形,因此在安装定位销1、定位销2、定位环、小球头座及均压板相应位置销孔时保持同轴心,并且C18/1MN设计采用球铰式调节结构,再加上大球头与小球头设计,在加载时,可有效减小偏心、倾斜加载引入的寄生分量从而造成的测量误差;同时传感器进行温度补偿,保证在使用温度条件下的测量准确度。提杆贯穿于整个组合式传感器中心,用于压紧大球头以及吊装。模拟4进1出接线盒将三个C18/1MN传感器输出数据并联,接入DMP41仪表,通过接线盒中滤波装置,保证读数的稳定、准确。
(a) (b)
(c) (d)
图2 高精度组合式力传感器组成
1.3 受载结构分析
该组合式力传感器由3个C18/1MN组成,最大受力为3MN,主要受力部件为大球头、大球头座、小球头、小球头座、均压板、底板。其中大球头、大球头座、均压板和底板受力均为3MN,小球头和小球头座受力为1MN。零件材料为42CrMo,屈服强度为9.300×108N/m2。对其进行有限元仿真,模拟实际使用时固定形式,对受力区域施加相应大小的力。有限元仿真计算结果如图3所示,大球头所承受的最大应力为1.584×108N/m2,最大变形量为0.011mm;大球头座所承受的最大应力为7.764×107N/m2,最大变形量为0.018mm;小球头所承受的最大应力为1.394×108N/m2,最大变形量为0.013mm;小球座所承受最大应力为1.001×108N/m2,最大变形量为0.011mm;均压板所承受最大应力为155MPa,最大变形量为0.062mm;下压板所承受最大应力为42MPa,最大变形量为0.012mm。以上受力部件最大应力均小于42CrMo合金钢的屈服极限,变形量处于安全范围。
(a)
(b)
(c)
图3 有限元仿真及结果
2 实验测试
2.1实验装置
高精度组合式力传感器测试在福建省计量科学研究院进行,实验标准装置为20 kN~2 MN力基准装置(国基证〔2023〕第171号),其测量范围为20 kN~2 MN,不确定度为0.002%(=3),由于此高精度组合式力传感器设计量程为3MN,准确度等级为0.01级,然而力基准装置的最大量程为2 MN,国内也仅有此力基准装置才能满足其准确度等级测试要求,所以本次测试额定负荷为2 MN。
所使用通讯仪表为HBM制造的DMP41高精度仪表(校准证书23S2-05034),准确度等级为0.0005。
2.2测试方案
2.2.1测试准备
将组合式力传感器放置在20 kN~2 MN力基准装置测试平台上并对中,在实验室环境温度(20±1)℃下恒温24h,将传感器与DMP41高精度仪表连接,预热30min。
2.2.2测试流程
参照JJG 144《标准测力仪检定规程》,对传感器以给定方式预加至少3次额定负荷,每次额定负荷的保持时间为30s~1min。每次预负荷被完全卸除之后,等待回零至少30s,检查仪表的回零情况,根据需要可重新调整零点。将DMP41高精度仪表调至零点(或作为零点的起点位置),以测量下限为测试起始点,沿传感器受力轴线逐点递增标准力值,至各检定点保持稳定后记录相应进程示值,至测量上限后逐点递减卸除标准力值,至各测试点保持稳定后记取相应回程示值。从传感器额定负荷的10%开始,逐级加荷,当负荷达到稳定,读取仪表数值,一直测试至额定负荷。此过程进行3次,记下相应示值,即可完成进程示值检测。
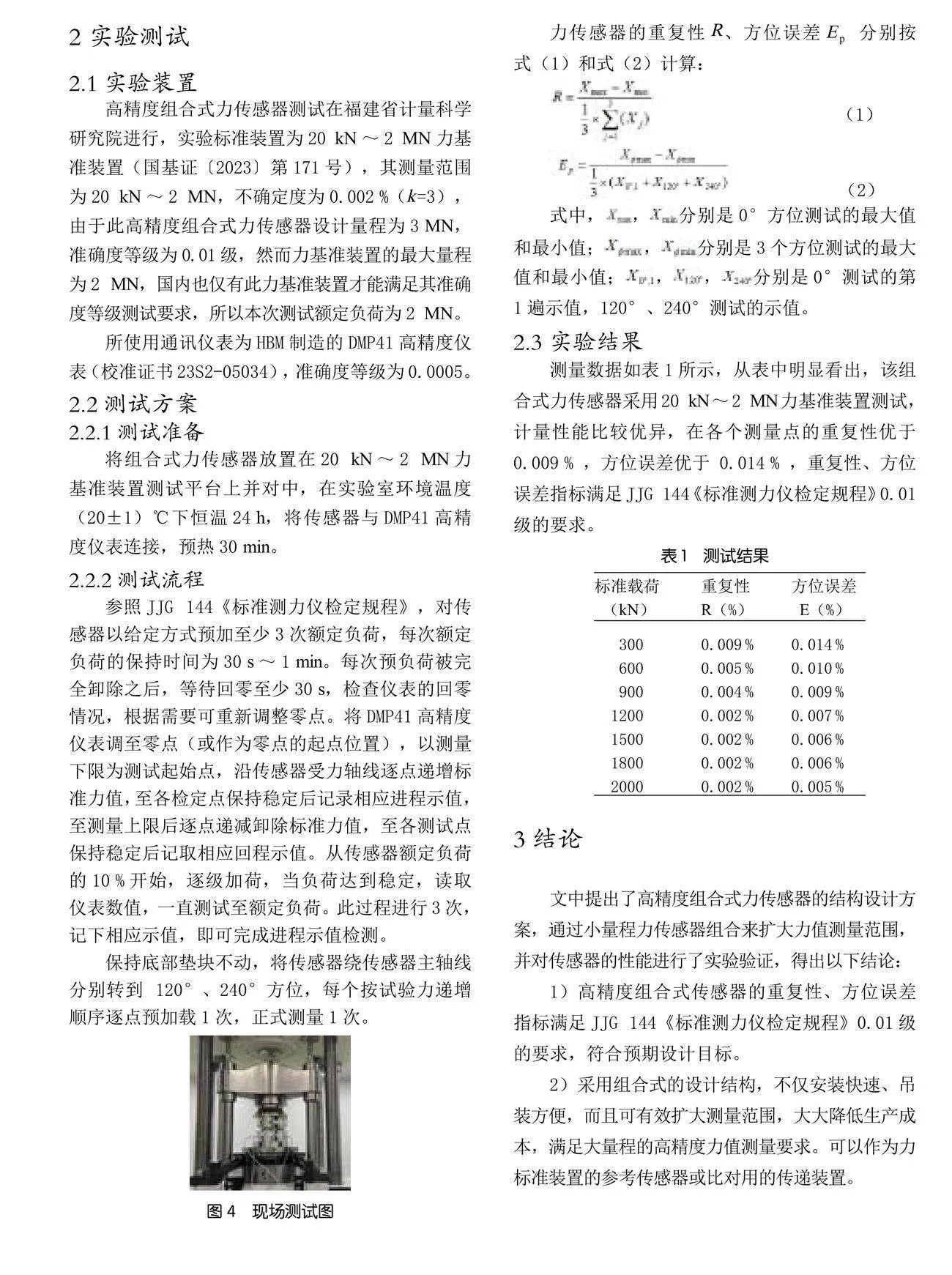
保持底部垫块不动,将传感器绕传感器主轴线分别转到 120°、240°方位,每个按试验力递增顺序逐点预加载1次,正式测量1次。
图4 现场测试图
力传感器的重复性、方位误差p 分RVLRaFnVjD0f2m/VNcp11A==别按式(1)和式(2)计算:
(1)
(2)
式中,,分别是0°方位测试的最大值和最小值;,分别是3个方位测试的最大值和最小值;,,分别是0°测试的第1遍示值,120°、240°测试的示值。
2.3 实验结果
测量数据如表1所示,从表中明显看出,该组合式力传感器采用20 kN~2 MN力基准装置测试,计量性能比较优异,在各个测量点的重复性优于0.009% ,方位误差优于 0.014% ,重复性、方位误差指标满足JJG 144《标准测力仪检定规程》0.01级的要求。
表1 测试结果
3结论
文中提出了高精度组合式力传感器的结构设计方案,通过小量程力传感器组合来扩大力值测量范围,并对传感器的性能进行了实验验证,得出以下结论:
1)高精度组合式传感器的重复性、方位误差指标满足JJG 144《标准测力仪检定规程》0.01级的要求,符合预期设计目标。
2)采用组合式的设计结构,不仅安装快速、吊装方便,而且可有效扩大测量范围,大大降低生产成本,满足大量程的高精度力值测量要求。可以作为力标准装置的参考传感器或比对用的传递装置。
参考文献
[1]杨振龙.基于组合式力传感器的超宽量程力值测量
方法研究[J].计量与测试技术,2020,47(04):48-
50.DOI:10.15988/j.cnki.1004-6941.2020.4.013.
[2]ISO 376-2011.Metallic materials-Calibration of
force proving instruments used for the verification
of uniaxial testing machines[S].2011.
[3]梁伟,杨晓翔,姚进辉,等.带滚珠调节的面—
面接触形式负荷传感器球头副[J].计量学报,2020,
41(07):816-822.
[4]周银. 一种新型力传感器的设计与标定[D].重庆大学,
2016.
[5]全国力值硬度计量技术委员会.标准测力仪检定规程:
JJG 144-2007[S].北京:中国质检出版社,2007.
