
基于灰狼优化算法的改进Canny算子的芯片标识图像边缘检测
2024-09-30 00:00:00刘勍郝静侯喆赵利民赵玉祥张进兵
贵州大学学报(自然科学版) 2024年5期












文章编号1000-5269(2024)05-0041-08 DOI:10.15958/j.cnki.gdxbzrb.2024.05.06
摘要:为有效进行芯片标识的提取,提出一种基于灰狼优化算法(graywolfoptimization,GWO)的改进动态双阈值的Canny算子来进行芯片标识图像边缘提取。首先,从芯片标识生产环境复杂、图像干扰信息多的角度出发,对Canny算子的双阈值进行改进;其次,使用灰狼优化算法确定其高阈值选取;最后,将本文算法与传统Log、Prewitt、Roberts、Canny、Sobel算子进行实验比较,利用召回率和精确率等方法作了客观评估。实验结果表明,本文所提算法优于传统的边缘提取算法,提取准确度高,为后续识别打下了坚实基础。
关键词:芯片标识图像;边缘检测;改进Canny算子;GWO 中图分类号:TP391.41 文献标志码:A
这些年,信息产业和人工智能进入快速发展时期,对芯片的需求量越来越大。在芯片的生产环节中对封装外观的检测是最后一步。同时,标识识别系统是图像处理技术在芯片检测领域的必要应用。其中,边缘提取算法能够准确清晰提取图像关键信息显得极为必要。
边缘提取算法已经产生多类方法,如基于梯度的传统检测算法;基于深度学习的边缘检测算法[1];Canny等考虑边缘提取算子需要拥有较好的检测效果以及边缘定位准确,提出Canny算子。Canny算子是一个多级边缘检测算法[2-3],与上述图像边缘检测算子相比,在信噪比和准确性上更有优势。传统Canny算子利用高斯滤波可以很好地去除图像中的高斯噪声,识别图像中的强边缘和弱边缘[4],但对于椒盐噪声处理效果不好,会平滑图像边缘[5]。张加朋等[6]提出了采用开关中值滤波替换高斯滤波器,开关中值滤波可以融合K-means和Otsu算法自适应选择高低阈值,提高自适应性。MA等[7]提出采用自适应平滑滤波器对椒盐噪声进行滤波,利用边缘噪声几何特征区别真假边缘。FARAHANIARD等[8]提出将模糊神经网络(fuzzyneuralnetworks,FNN)和自适应中值滤波(adaptivemedianfilter,AMF)融合进行滤波,解决椒盐噪声污染图像的边缘检测问题。汤旻安等[9]提出了利用双边滤波器对图像进行去噪,自适应地选取高低阈值,并对边缘进行检测。CHEN等[10]引入了最大类间方差(Otsu)算法,运用Otsu算法进行高低双阈值的自适应。针对芯片标识提取需要的准确性以及清晰度,现提出一种使用灰狼优化算法(graywolfoptimization,GWO)优化并进行阈值选取的改进Canny算法。
为此,本文在现有Canny算法改进研究的基础上,引入灰狼优化算法。将图像灰度值作为GWO的适应度函数,旨在寻找最适合芯片标识图像的阈值。随后,将该改进算法的检测结果与其他边缘算子进行主客观比较。
1Canny算子及其自适应双阈值
Canny算法是一种非常流行的边缘检测算法,是JohoCanny在1986年基于3个图像边缘准则即良好的信噪比、准确的定位、对单一边缘有唯一响应创造的边缘检测算法[11-12]。其基本流程如图1所示,具体如下:1)将原始图像进行高斯滤波,以减少噪声对边缘检测的影响。2)对滤波后的图像进行梯度计算,得到每个像素点的梯度大小和方向。3)对梯度大小进行非极大值抑制处理,将不是边缘的像素值设为0,只保留局部最大值点[13-14]。4)经过非极大ku3FDPec9JgT/FeFViJwdQ==抑制后的图像中仍然有很多噪声点,为此算法中采用了一种叫双阈值技术进行检测,即设定一个阈值上界和阈值下界,图像中像素点如果大于阈值上界则认为是边界(称为强边界);小于阈值下界则认为不是边界;介于两者之间的则认为是候选项(称为弱边界),需进行进一步处理[15]。传统的Canny算子的双阈值确定方法通常是人为按经验设定,这会造成细节丢失,或者保留的噪声点过多。本文探索采用灰狼优化算法来优化阈值选取,根据每张图像的特性进行阈值设定。
2灰狼优化算法
灰狼优化算法是由澳大利亚格里菲斯大学学者Mirjalili等人于2014年提出的一种群智能优化算法[16-17]。灵感来自于灰狼群体捕食行为。它具有较强的收敛性能,结构简单、需要调节的参数少,容易实现,存在能够自适应调整的收敛因子以及信息反馈机制,能够在局部寻优与全局搜索之间实现平衡,因此在对问题的求解精度和收敛速度方面都有良好的性能。但是也存在易早熟收敛,面对复杂问题时收敛精度不高、收敛速度不够快等问题[18]。
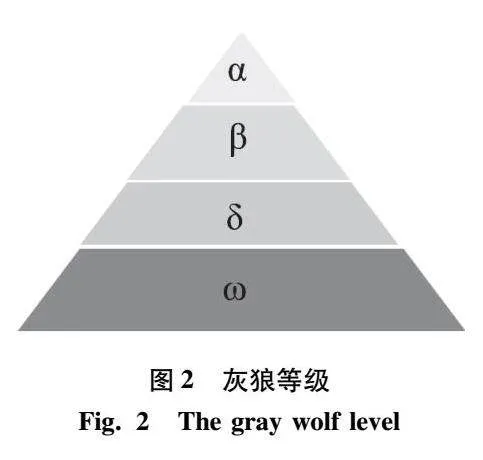
灰狼群体中有严格的等级制度,如图2所示,小部分拥有绝对话语权的灰狼带领一群灰狼向猎物前进。灰狼群一般分为4个等级:α、β、δ、ω。在集体狩猎的时候,α狼负责指挥与决策,β狼帮助α狼完成决策,δ狼则是负责实现决策听从指挥,ω是协调狼群协作。总而言之,将α作为最优解(个体的适应度最优),β为次优解,δ为最佳解决方案,剩下的候选解命名为ω。狩猎过程由α、β、δ引导,跟随这3只狼,去找到3个最佳解决方案;ω围绕该区域进行搜索,目的是找到更好的解决方案,然后更新。
集体狩猎是灰狼的一种社会行为。在这一过程中,社会等级发挥着至关重要的作用。在α狼的带领下,灰狼们会先跟踪并接近猎物,通过骚扰、追捕和包围等一系列战术使猎物停止移动。之后,它们发起攻击以捕获猎物。为了模拟灰狼的社会等级,文中构建相应的层次模型并对其进行数学建模。在计算机模拟环境中,虽然无法像现实中的狼群那样通过视觉和嗅觉来定位猎物,但可以设定一个搜索空间,并假设其中已经存在一个最佳解决方案,即“猎物”的位置。利用这个初始的最佳解决方案,不断迭代优化,以逐步逼近更出色的解决方案。具体流程如图3所示。
在灰狼进行集体捕猎时,灰狼个体位置的更新公式如式(1):
xi(t+1)=xi(t)+vi(t+1)(1)
式中:xi为第i只灰狼在t时刻的位置;vi(t+1)为第i只灰狼在t+1时刻的速度。
灰狼个体速度的更新公式如式(2):
vi(t+1)=A1vi(t)+A2(xp(t)-xi(t))+A3(xp(t)-xq(t))(2)
式中:A1、A2和A3分别为3个加速常数;
xp(t)为当前群体中适应度最好的灰狼个体的位置;xq(t)为当前群体中适应度第二好的灰狼个体的位置。
灰狼群体捕猎中协作和竞争如式(3)—(5):
Dp(t)=‖xp(t)-xi(t)‖(3)
Ci(t)=∑Nj-1Xj(t)-xi(t)(4)
xi(t+1)=xp(t)-A4·Dp(t)·Ci(t)+A5·r1·(x1(t)-x2(t))(5)
式中:Dp(t)为第i只灰狼到当前群体中适应度最好的灰狼个体的距离;Ci(t)为第i只灰狼与群体其他灰狼个体之间竞争与协作的力度;A4和A5分别为两个调节参数;r1为随机向量;x1(t)和x2(t)分别为当前群体中位置最好的灰狼和位置第二好的灰狼。
3GWO优化适应度函数
灰狼优化算法在搜索迭代中,通过灰狼的适应度值来判断当前位置的优劣,从而更新灰狼的位置。由此可见,适应度函数的选择具有举足轻重的作用。考虑到图像的灰度值和边缘信息的呈现,选择图像灰度值作为构建适应度函数的核心依据。由式(6)计算求得
G=δ(t)=P0(t)∑ti=0[iPiP0(t)]+P1(t)∑L-1i=t+1[iPiP0(t)](6)
式中:δ(t)为类间方差;Pi为点i灰度值出现的概率;P0(t)为灰度值在区间(0,t)的概率;P1(t)表示灰度值在区间(t+1,L-1)的概率。灰狼优化算法可以根据给出的适应度函数,寻找适应度函数的最大值,即为最佳阈值。
4实验结果与分析
本文实验环境为Windows10,AMDRyzen54600UCPU,16GBRAM计算机,实验所用工具为MATLAB2021a;选取各种不同环境下的芯片标识图像进行实验,并分别采用经典Log、Prewitt、Roberts、Canny、Sobel以及本文算法进行边缘检测评估比较。
在进行边缘检测评估时,通常采用精确率P(precision)和召回率R(recall)作为指标。精确率展现了在机器生成的边界像素中,真实边界像素所占的比重。换言之,它体现了预测为正例的结果中真实正例的比例,强调的是预测的准确性。召回率则揭示了所有真实边界像素中被机器成功识别出来的比例,也就是真实正例被预测为正例的比率,它更侧重于能够找出多少真正的正例。F1又称为F-Score,是精确率和召回率的调和平均数,通过调整β的值,可以平衡精确率和召回率在评估中的权重,具体计算公式如式(7)所示。在边缘检测过程中,用TP(truepositive,TP)表示正确预测的正例数量,FP(falsepositive,FP)代表被错误预测为正例的数量,而FN(falsenegative,FN)表示正例的样本被错误地预测为负例的数量,它们被用来计算F1、精确率和召回率。
F1=(1+β2)PRβ2(P+R)(7)
P=TPTP+FP(8)
R=TPTP+FN(9)
AUC(areaunderthecurve,AUC)是衡量模型性能的指标,通常用于评估模型效果,其取值范围在0到1之间,数值越高表示模型性能越好,如式(10)所示。
AUC=∑i∈Mri-M(M+1)/2MN(10)
式中:M为正样本数;N为负样本数;∑i∈Mri为正样本序号之和,i是序号。
因为芯片表面面积明确,本文还采用分割常用评估评判标准如骰子系数Dice(dicecoefficient,Dice)、体积重叠误差VOE(volumetricoverlaperror,VOE)、相对体积误差RVD(relativevolumedifference,RVD),对几种边缘检测算子进行评估,如式(11)—(13)所示。
Dice=2(Rs∩Rg)Rs+Rg(11)
VOE=2(Rs-Rg)Rs+Rg(12)
RVD=RsRg-1×100%(13)
式中:Rg为标准参考图;Rs为算法的结果。
如表1所示,本文对7种不同的边缘检测算法进行评估,包括Log、Prewitt、Roberts、Sobel、Canny、文献[9]算法和本文算法。通过对5张不同的芯片标识图像进行测试,得到了每种算法在多个评价指标上的表现数据。
评估对比实验结果显示,本文算法在多数评价指标上都有优异的表现,尤其是在F1分数上,它在所有图像中均达到或接近最高值,显示出其在精确性和召回性上的优势。在AUC指标上,本文算法也展现了较高的分类性能,尤其是在图3和图4上。Dice系数结果进一步证实了本文算法在边缘提取准确性上的优势。其他传统算法(Log、Prewitt、Roberts、Sobel)在这些评价指标上的表现通常不如Canny和本文算法,这可能是由于它们在处理高噪声或复杂纹理图像时的局限性。使用灰狼优化算法根据图像特性选取阈值的方法,其关键在于它不仅关注强边缘,也试图保留那些可能是真实边缘的弱边缘信息。在自适应双阈值的应用中,算法首先使用高阈值检测出最显著的边缘,这些边缘通常对应图像中的主要结构。然后,算法利用低阈值来探索这些主要边缘附近的区域,以便捕捉到更多的细节。通过这种方式,算法能够在保持高召回率的同时,也提高了精确度,这在F1的优异表现中得到了体现。总体而言,本文算法在芯片标识图像边缘提取任务上表现出了较高的性能,尤其是在F1分数、AUC和Dice系数上。
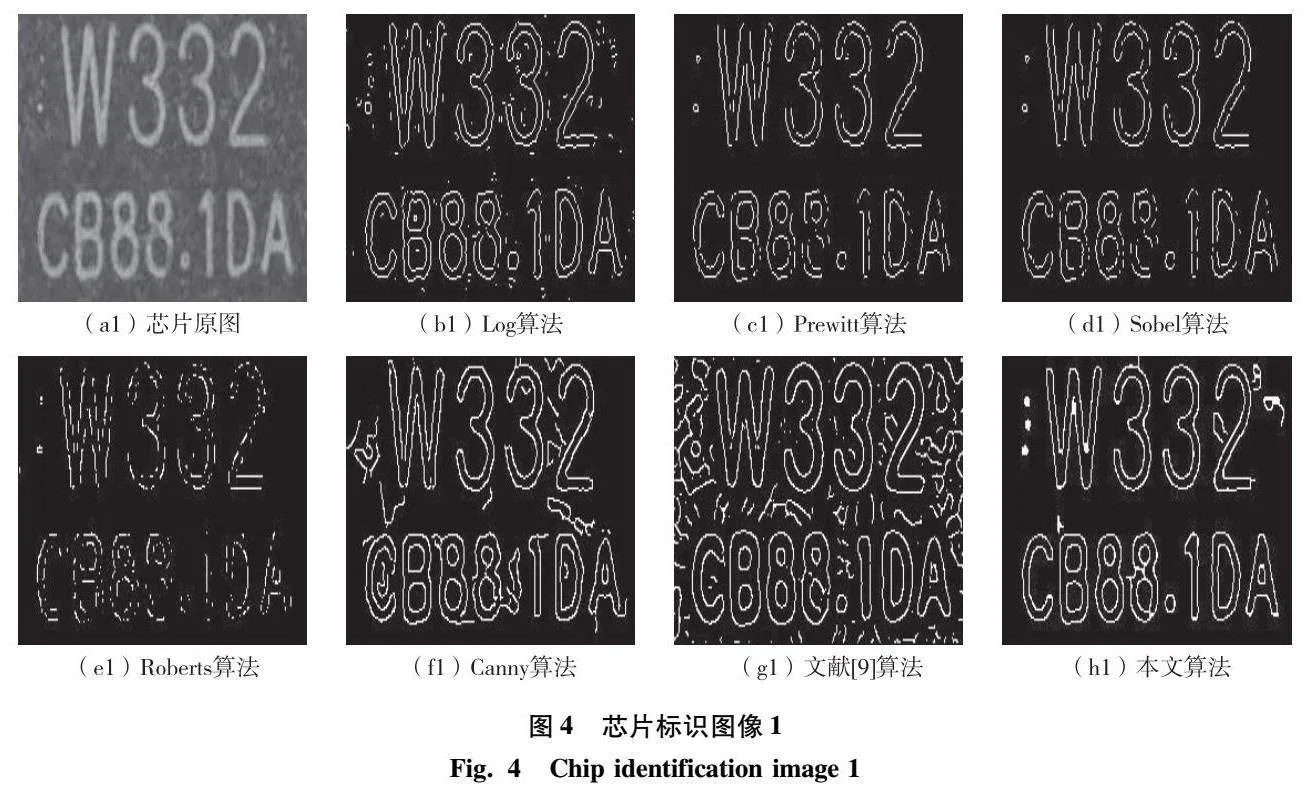
以下的图4—8皆为芯片标识图像,其中图(a1)—(a5)是芯片标识原图,(b1)—(b5)、(c1)—(c5)、(d1)—(d5)、(e1)—(e5)、(f1)—(f5)分别为传统Log算子提取图像、传统Prewitt算子提取图像、传统Sobel算子提取图像、传统Roberts算子提取图像和传统Canny算子提取图像,最后(g1)—(g5)是文献[9]改进Canny算子提取图像,(h1)—(h5)为本文算法提取的芯片边缘图像。
实验结果显示,传统算法在不同程度上都存在一些问题。Log算法在边缘定位上较为准确,但在噪声较多的图像中容易产生虚假边缘。Prewitt算法对噪声较为敏感,导致检测出的边缘不够清晰。Roberts算法对细节边缘敏感,但在噪声抑制上表现不佳。Sobel算法相对平衡,但在边缘清晰度和噪声抑制上仍有改进空间。Canny算法是这些传统算法中表现最好的,它通过双阈值处理和边缘连接策略提供了较为清晰的边缘检测结果,但在高噪声图像中仍然会出现一些噪声点。文献[9]算法通过对传统算法的优化,尝试解决噪声和边缘清晰度的问题,但实验结果表明,虽然在某些情况下表现得比某些传统算法好,但仍未能在所有方面达到最优。本文算法在边缘提取的过程中,首先通过灰狼优化算法选取合适的高低阈值,确保了即使在光照变化或纹理复杂的情况下,算法也能准确地识别出真实的边缘,保证边缘的完整性,使提取出的边缘更加清晰和连贯。同时,算法能够去除噪声产生的伪边缘,从而保证在不损失重要边缘信息的前提下,去除那些不必要的干扰。081c36c3b48d1ae443cccea284948d77999f1d7a85feaa87c25100ef0ac08844这一点在处理高噪声环境下的图像时尤为重要,它能够确保最终得到的边缘图像既干净又精确。如图4—8所示,提出的改进Canny算法在实验中表现出了显著的优势。它不仅在视觉效果上提供了最清晰、最完整的边缘信息,在噪声抑制方面也表现出色。通过对边缘检测机制和噪声抑制策略的创新设计,本文算法能够有效地识别真实边缘,同时抑制噪声点的生成。
5总结
本文深入分析了多种边缘检测算法在图像处理中的表现,通过对比Log、Prewitt、Roberts、Sobel、Canny算法,以及文献[9]中改进算法和本文提出的新算法,得出了一系列结论。首先,尽管传统算法在边缘检测领域有着广泛的应用,但它们在处理含有高噪声的图像时往往会产生不准确的边缘,或在边缘清晰度上不尽如人意。Canny算法在这些传统方法中表现相对优秀,但在极端情况下仍然会受到噪声的影响。文中提出的算法在芯片标识图像边缘提取中显示出显著的优势,特别是在噪声抑制和边缘清晰度方面。这得益于算法中采用的先进边缘检测机制和有效的噪声抑制策略,使算法能够在保持边缘完整性的同时,最大限度地减少噪声的干扰。
下一步研究将探索更高效算法的实现方式,以减少计算资源的消耗,提高算法的运行速度,使其更适合实时处理大规模图像数据。通过引入机器学习或深度学习技术,进一步提高算法对芯片标识检测领域和芯片生产复杂场景的适应性和鲁棒性。
参考文献:
[1]
黄梦涛,连一鑫.基于改进Canny算子的锂电池极片表面缺陷检测[J].仪器仪表学报,2021(10):199-209.
[2]张愉玲,邢会林,李三忠,等.基于蚁群和Canny边缘检测算子混合算法的二维岩石图像裂隙特征提取与修复研究[J].大地构造与成矿学,2021,45(1):242-251.
[3]KIMJ,LEES.Extractingmajorlinesbyrecruitingzero-thresholdCannyedgelinksalongsobelhighlights[J].IEEESignalProcessingLetters,2015,22(10):1689-1692.
[4]车畅,兰文宝.Canny算法和中值滤波法的红外全景图像拼接[J].激光杂志,2020,41(5):109-113.
[5]杨少令,刁燕,罗华,等.一种改进的Canny图像分割算法[J].计算机与现代化,2018(8):57-60.
[6]张加朋,于凤芹.基于Canny算子改进型的影像测量边缘检测[J].激光与光电子学进展,2020,57(24):258-265.
[7]MAQDY,MAZ,JIC,etal.ArtificialobjectedgedetectionbasedonenhancedCannyalgorithmforhigh-speedrailwayapparatusidentification[C]//201710thInternationalCongressonImageandSignalProcessing,BioMedicalEngineeringandInformatics(CISP-BMEI).Beijing:IEEE,2017:1-6.
[8]FARAHANIARDH,SHANBEHZADEHJ,PEDRAMMM,etal.Ahybridedgedetectionalgorithmforsalt-and-peppernoise[J].TheInternationalMultiConferenceofEngineersandComputerScientists,2011,1(3):16-18.
[9]汤旻安,王晨雨.基于改进Canny算法与Hough变换的轨道图像边缘提取[J].铁道标准设计,2021,65(8):60-64.
[10]
CHENXF,GUANHB,GUJN,etal.AstudyandimprovementsonCannyalgorithm[J].AdvancedEngineeringForum,2012,2078(6/7):205-209.
[11]杜绪伟,陈东,马兆昆,等.基于Canny算子的改进图像边缘检测算法[J].计算机与数字工程,2022,50(2):410-413.
[12]梅永,庄建军.基于Canny边缘检测的图像预处理优化算法[J].信息技术,2022,45(1):75-79.
[13]赵娅岐.基于Canny算子的边缘检测算法研究改进与电路实现[D].武汉:华中科技大学,2021.
[14]李小龙,闫娟,杨慧斌,等.基于改进Canny算法的齿轮表面边缘检测[J].智能计算机与应用,2022,12(10):180-183.
[15]康雅琪,孙鹏,郎宇博,等.重构色彩空间下陈旧印章印文自适应Canny检测[J].计算机仿真,2023,40(8):230-234,402.
[16]杨益服,李文磊,李俊杰,等.基于改进GWO-SVM的金属产品表面缺陷分类研究[J].组合机床与自动化加工技术,2022,63(11):143-146,150.
[17]郑德强.基于灰狼优化的V-detector检测器分布方法[J].智能计算机与应用,2022,12(11):34-40.
[18]付家棋,胡国杰.基于改进灰狼算法优化BP神经网络的住宅工程造价预测研究[J].科技创新与应用,2022,12(30):12-16.
(责任编辑:曾晶)
Abstract:
Toeffectivelyextractchipmarking,animproveddynamicdualthresholdCannyoperatorbasedongraywolfoptimization(GWO)algorithmisproposedforedgeextractionofchipmarkingimages.Firstly,fromtheperspectiveofthecompleximageinterferenceinformationinthechipmarkingproductionenvironment,thedualthresholdoftheCannyoperatorisimproved.Secondly,thegreywolfalgorithmisusedtodetermineitshighthresholdselection;Finally,thealgorithmproposedinthispaperisexperimentallycomparedwithtraditionalLogoperators,traditionalPrewittoperators,traditionalRobertsoperators,traditionalCannyoperators,andtraditionalSobeloperators,andobjectiveevaluationsareconductedusingmethodssuchasrecallandaccuracy.Theexperimentalresultsshowthatthealgorithmproposedinthisstudyissuperiortotraditionaledgeextractionalgorithms,withhighextractionaccuracy,andlaysasolidfoundationforsubsequentrecognitiontasks.
Keywords:
chipmarkingimage;edgedetection;improvedCannyoperator;graywolfoptimization(GWO)
收稿日期:2023-10-21
基金项目:国家自然科学基金资助项目(61461046);甘肃省自然科学基金资助项目(20JR10RA802,20JR5RA494);甘肃省科技重大专项计划资助项目(22ZD6GE016,23ZDGE001);甘肃省教育厅教育揭榜挂帅项目(2021jyjbgs-06);天水师范学院科研项目(PTJ2022-01,PTJ2022-04);天水市秦州区科技计划资助项目(2023-SHFZG-6476);天水师范学院研究生创新引导项目(2023CXZX-802,TYCX2236);甘肃省2023年度重点人才项目(2023RCXM29)
作者简介:刘勍(1970—),男,教授,博士,研究方向:智能图像信息处理技术,E-mail:lqlzu@126.com.
*通讯作者:刘勍,E-mail:lqlzu@126.com.
贵州大学学报(自然科学版)2024年5期