基于GNSS高精度定位技术的压路机无人驾驶控制系统研究
2024-09-26 00:00:00王彤周春风
交通科技与管理 2024年17期


摘要 文章根据压路机自身的特点,结合碾压作业的过程,首先研究了无人驾驶压路机控制系统,形成了无人驾驶控制系统框架,开发了适用于无人驾驶压路机的路径规划与导航补偿系统;然后针对施工安全,研发了压路机主动防撞预警系统,并根据不同情况下的作业情况,以压路机为中心将施工区域划分为不同风险等级;最后根据分析等级,制定了作业区内移动障碍物的避让控制策略,保障压路机无人作业时的安全。
关键词 无人驾驶;自动化作业;高精度定位;压路机
中图分类号 U416.217 文献标识码 A 文章编号 2096-8949(2024)17-0065-03
0 引言
在无人施工机械领域,欧美发展较早、技术较为成熟,国外顶尖厂商有小松、卡特彼勒等[1]。1995年,小松开发出遥控距离达1.8 km的推土机,可通过通信卫星进行管理控制,编制远程土方作业系统,曾应用于清除富根火山喷发产生的火山岩[2]。美国卡特彼勒公司在2002年申请了关于基于示教再现的自动装载技术专利,利用控制器发送信号触发挖掘机进入示教或再现模式[3]。国内对工程机械自动控制技术的研究起步相对较晚,总体发展水平也落后于欧美发达国家。国内的研究单位主要有清华大学、同济大学、国防科技大学、浙江大学、徐工集团工程机械股份有限公司、三一集团有限公司等机构[4]。早在2002年,国内就出现了第一款W102DZ型高性能无人驾驶振动压路机,基本实现了压路机上电、点火、启动和熄火的远程控制,以及行驶速度调节、倒车和转向的人工遥控。但是,整体上无人驾驶压路机的应用,还未形成成套的改造流程和施工工艺,施工期的安全问题也一直备受关注[5]。
1 无人驾驶控制系统总体设计
1.1 压路机无人驾驶工作原理
无人驾驶压路机是综合利用高精度GNSS定位技术、障碍物识别技术,在压路机上安装卫星接收机、微波通信主机、电台信号接收天线;在行车/倒车系统上安装自动控制装置,在油路系统上设置油路自动控制装置;在转向系统上设置转向控制电机和电磁阀装置等,通过工业计算机内设置的处理器、程序软件、交换机等组件实现压路机自动按照既定的行驶轨迹、转向、变道、速度、遍数等,完成各类作业任务,达到压路机无人施工的效果。
1.2 系统总体设计
根据无人驾驶压路机工作原理,无人控制系统包含环境感知模块、决策规划模块和运动控制模块等三部分,图1为压路机无人驾驶系统总体设计框图:
环境感知模块主要作用是利用激光雷达、毫米波雷达、超声波雷达获取并处理压路机周围的环境信息,为无人驾驶系统提供施工环境的关键信息。
决策规划模块主要作用是综合施工环境信息及压路机车身信息,对压路机的行为进行决策,同时根据碾压施工工艺进行碾压路径规划,为运动控制模块控制压路机提供指导。
运动控制模块主要作用是接收决策规划模块的指令并控制车辆响应,保证控制精度,对压路机目标碾压速度、碾压遍数、碾压轨迹、振频、振幅等进行控制。
2 路径规划与导航补偿系统研究
2.1 压路机施工路径规划方法
无人驾驶压路机在无人碾压作业时的路径规划,是影响整体碾压作业质量和施工精度的重要因素。一般路基施工段落近似矩形,其边界相对规则,将其定义为简单边界,采用几何算法最为有效,通过RTK测量施工区域四个转角点的坐标,以获得压路机作业区的边界围栏,并将作业区划分为多个并行的碾压道,压路机在任一碾压道的起始端和终止端之间按预设的碾压遍数行驶,控制压路机的施工路径。
2.2 路径导航补偿系统
压路机作业过程中,工作面状况恶劣时将引起车身倾斜、振动,导致GNSS定位位置与车身实际位置存在偏移,影响作业精度。由于压路机为铰接转向形式,在压路机作业路径跟踪控制的过程中,可利用角度编码器采集钢轮与车身之间的转角信息,以检测车身位姿。在振动钢轮一侧安装倾角传感器,采集车身倾斜导致的GNSS定位位置与车身实际位置的偏移。由此,形成压路机的行驶矫正信息,从而可根据矫正信息调整压路机的行驶控制指令。
根据以上原理,路径导航补偿系统主要由控制器、导航系统、角度编码器以及倾角传感器组成。其中,控制器与导航系统、角度编码器以及倾角传感器采用通信连接,角度编码器设置于压路机车身与钢轮的铰接点、倾角传感器设置于压路机钢轮的一侧。若钢轮与车身的夹角超过阈值,即夹角差值不满足预设夹角的差值范围,则表示压路机转向角度过大或者过小,则需要对压路机进行转向调节;若倾斜角超过阈值,即倾斜差值不满足预设倾斜的差值范围时,则表示压路机钢轮偏离原始预设的碾压轨迹,需要对压路机进行转向调节。
3 环境感知与主动防撞系统研究
无人驾驶压路机最大特点是实现了路基碾压的无人化施工,避免了人为因素对施工质量的影响,可在夜间施工,能够有效缩短工期。由于压路机处于无人控制状态,遇到紧急情况无法模仿驾驶人员采取多方面的紧急措施,因此无人驾驶压路机的施工安全是必须解决的问题。一般情况下压路机在碾压过程中,施工工作面不会出现固定障碍物,只有可以移动的生命体障碍物,如施工人员、施工区域过往的人员、附近村镇的牲畜等,因此环境感知与主动防撞系统需要对移动障碍物进行智能识别并进行避让。路基在碾压过程中的行驶受碾压工艺的控制,有固定的轨迹和遍数,遇到移动障碍物,不能选择绕行,否则会造成其他区域的过压,或者正常施工路线的漏压,造成施工质量存在缺陷。因此无人驾驶压路机只能采取制动措施,等到移动障碍物离开或远离后,才能重新启动,继续工作。由于压路机自重较大,如果在路基工作面上采取紧急制动措施,会造成路基填土拥集,导致碾压后的路基出现波浪,因此无人驾驶压路机在遇到移动障碍物时应有反应区域,使压路机平稳减速,直到在障碍物前方一定距离内实现平稳制动。
3.1 环境感知与主动防撞系统组成
无人驾驶压路机环境感知与主动防撞系统主要有环境感知模块、控制参数模块、控制执行模块等组成,每个模块具有不同功能,各个模块共同工作实现压路机的主动防撞。环境感知模块对自车及移动障碍物进行探测,将得到的信息通过CAN总线传送至控制参数模块;控制参数模块根据得到的信息进行危险判断,并将相应的控制指令通过CAN总线传送至控制执行模块;控制执行模块实行报警、制动等控制动作,最终实现压路机的安全施工。环境感知与主动防撞系统组成部分如图2所示:
图2 环境感知与主动防撞系统
(1)环境感知模块
环境感知模块主要通过目标探测传感器对目标进行探测,得到压路机与障碍物的相对位置、相对速度及相对方位等信息;利用压路机的各种传感器对压路机的速度、加速度及转向角进行探测,从而为控制参数模块提供决策信息。
(2)控制参数模块
控制参数模块依据环境感知模块采集的信息,进行压路机行驶危险性的辨别,根据设定的安全距离模型,判断当前压路机是否处于危险状态,并根据移动障碍物靠近压路机范围的不同,将不同程度的报警信号及执行信号传送至控制执行模块。
(3)控制执行模块
在压路机行驶的过程中,如果遇到移动障碍物,系统通过声光报警模块进行声音及闪光报警提示,提示附近人员注意安全,或者将牲畜驱离压路机;当检测到移动障碍物靠近压路机时,系统则通过控制执行模块,采取减速、制动等措施。
3.2 障碍物避让控制决策
压路机在获取环境信息后,如果在行驶路径上判定存在移动障碍物,则将触发停车等待,不应进行障碍物规避,这是为保证压实效果而必须按规划路径行驶,如进行避障将无法保证碾压效果。压路机必须等移动障碍物离开后,方可继续前进。因此,合理制定安全控制策略,可以提高压路机的施工效率、安全性及可靠性。该文根据移动障碍物与压路机的相对速度、位置、方位,制定了相应的避让控制策略。
(1)压路机施工区域风险等级划分
压路机施工区域风险等级划分是避让控制策略的核心,由于压路机运行环境较为单一,可将压路机的中心点作为施工安全区域划分的参考点。将距离压路机任意一点小于2 m的区域风险等级设定为Ⅰ级,将处在碾压路径上、距离压路机任意一点在2~10 m之间的区域风险等级设定为Ⅱ级,将碾压路径区域以外、距离压路机任意一点在2~10 m之间的区域风险等级设定为Ⅲ级,将距离压路机任意一点大于10 m的区域风险等级设定为Ⅳ级。
(2)移动障碍物避让控制策略
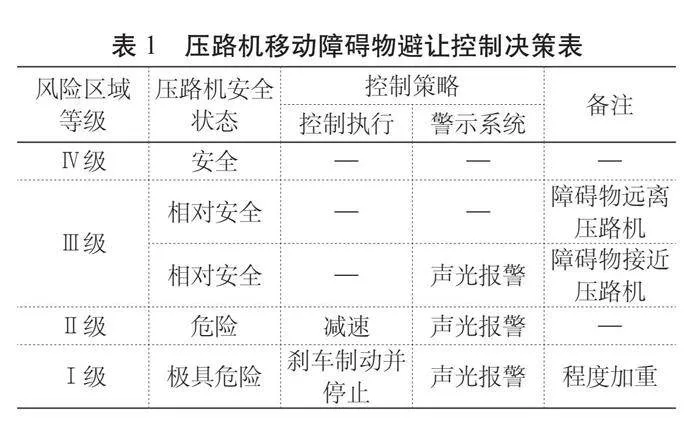
移动障碍物避让控制策略如表1所示。
当移动障碍物进入Ⅳ级风险区域时,压路机处于安全状态,控制执行模块不采取任何报警措施。
当移动障碍物进入Ⅲ级风险区域时,压路机处于相对安全状态。如果环境感知模块判定移动障碍物远离压路机,则控制执行模块不采取报警措施;如果环境感知模块判定移动障碍物正在接近压路机,则控制执行模块启动警示系统,进行声光报警。
当移动障碍物进入Ⅱ级风险区域时,压路机处于危险状态,控制执行模块立即启动执行机构,压路机开始减速,同时警示系统启动声光报警。
当移动障碍物进入Ⅰ级风险区域时,压路机处于极具危险状态,控制执行模块立即启动执行机构,压路机刹车制动并停止,同时警示系统启动声光报警且报警程度加重。
4 结论
该文主要研究了压路机无人驾驶控制系统,形成了无人驾驶控制系统框架,开发了适用于无人驾驶压路机的路径规划与导航补偿系统,针对施工安全研发了压路机环境感知与主动防撞系统,得到如下结论:
(1)根据路基施工段落平面特征,提出了无人驾驶压路机碾压作业的路径规划要求,基于压路机的往复碾压、变道、叠轮等施工特点,形成了全覆盖的路径规划方法。
(2)针对压路机车身倾斜、振动导致的作业精度误差,利用GNSS导航系统、角度编码器、倾角传感器设计了路径导航补偿系统,提高了压路机的作业精度。
(3)针对压路机无人驾驶安全问题,将施工区域划分为四个风险等级,并开发了压路机环境感知与主动防撞系统,实现对移动障碍物的智能识别,并根据障碍物所处风险区域的不同等级,制定了相应的避让控制策略。
参考文献
[1]田晋跃.国外军用土方机械无人自动控制技术综述[J].工程机械,2020(11):59-66+9.
[2]杨继红,吴现卫,王生波.远距离智能遥控推土机的研究[J].建筑机械化,2018(1):19-21.
[3]白桦,陆念力.液压挖掘机工作装置运动轨迹的智能控制及示教再现[J].哈尔滨建筑大学学报,2000(4):70-73.
[4]王彤,李强明.无人驾驶压路机主动防撞系统研究[J].智能城市,2021(24):155-156.
[5]徐工.徐工无人驾驶压路机与平地机3D找平技术成功应用[J].工程机械文摘,2019(4):16.