基于点云融合的高精度三维数字模型构建方法
2024-09-26 00:00:00付强罗焰华陈衡锋杨超曾淀龙观平
交通科技与管理 2024年17期
摘要 文章提出了一套完整的高精度综合数字化建模方法。RTK定位技术及激光雷达技术应用于无人机倾斜摄影中,实现了高精度的站场外部数据采集。三维激光扫描技术用于获取站台内部结构的点云数据,点云融合后获得内外一体的三维数字模型。将该方法运用于广州白云站综合交通枢纽数字模型构建中,精度评估表明提出的方法在实际应用中取得了高质量的数字模型。
关键词 无人机倾斜摄影;三维激光扫描;RTK技术;激光雷达;高精度数字模型
中图分类号: U217 文献标识码 A 文章编号 2096-8949(2024)17-0004-03
0 引言
铁路工程结构的三维建模研究工作一直是备受关注的问题,对三维重建技术进行深入研究具有现实意义[1]。传统测量方法具有精度、效率低的局限性。随着无人机技术及三维激光扫描技术的发展,为站房复杂环境内外一体的高精度三维数字模型的搭建提供了一种新思路。
廖玉佳等[2]使用无人机对地质灾害地区建立了三维数字模型;彭仪普等[3]探讨了无人机建模质量的影响因素。对于复杂环境的建模需求,单一的无人机倾斜摄影数据采集方法只能获取模型的顶部数据,刘宇等[4]利用三维激光扫描技术对高层建筑进行了三维重建;华远峰等[5]验证了三维激光扫描在立面测绘中精度的可靠性。上述学者的工作均论证了无人机和三维激光扫描技术在三维建模数据采集过程中的高精度。李晓斌等[6]将两种方法结合,实现了无人机倾斜摄影测量三维建模精度的实时评价;何原荣等[7]将该方法应用于古建筑的三维重建,为古建筑文化遗产的修复与保护提供了重要技术支持。
针对铁路站房的复杂环境,该文还引入了RTK定位技术及激光雷达技术,宋伟等[8]总结了影响RTK定位精度和可靠性的关键因素,论证了RTK凭借其瞬时高精度的优势已成为当前主流的高精度定位技术。
1 研究方法
1.1 基于RTK技术与激光雷达技术的高精度影像采集技术
无人机倾斜摄影的原理是利用无人机进行倾斜拍摄,将多个倾斜角度下的影像数据进行拼接,生成真实的三维模型。RTK技术通过在基站上设置高精度的GPS接收器,建立基站和无人机之间的差分信号,通过对GPS信号的实时处理,消除大气层误差和钟差误差等影响,从而实现无人机的高精度定位和姿态测量,以提高影像数据的精度和准确性。
激光雷达是一种主动式遥感技术,将其与无人机集成,充分发挥激光雷达高精度、高效率、广应用的特点,通过地面扫描获取高精度的三维点云数据,以提高倾斜摄影的精度和效率。
1.2 三维激光扫描
三维激光扫描是一种用于获取物体或场景三维几何信息的技术。它利用激光束扫描物体表面,并测量激光束在空间中的位置和反射强度,生成表示物体形状和结构的点云数据。三维激光扫描技术可以获取建筑物内部的高精度点云数据,而无人机倾斜摄影技术则可以获取建筑物外部的高精度影像数据,两者结合可以实现建筑物的全面三维重建。
1.3 点云融合建模
使用点云融合技术进行三维数字建模,在建筑物内外一体化的三维建模过程中,考虑无人机外部数据和三维激光扫描仪内部数据的重合度通常很低,故而使用点对配准方法。计算三维激光扫描仪数据中任意点的坐标(x1,y1,z1),在绝对坐标系下的坐标(x0,y0,z0)。它们间的关系可由式(1)表示:
(1)
式中,R为3×3旋转矩阵,t为3×1位移矩阵,通过三点绝对坐标和对应相对坐标可以反算出R、t矩阵中所有元素的值。
2 场景应用
广州市白云站作为“十三五”铁路规划中的重要项目,将承接广州站、广州东站的全部普速列车,肩负广州全部普速客运的枢纽功能,将逐渐建设成为集各种方式一体化换乘的综合交通枢纽,将成为路网中重要的普速客站之一。该文就如何实现类似白云站综合枢纽复杂工程结构的内外一体化及站场环境的采集,建立各子系统协同统一运转的多时序数字孪生模型进行进一步研究。
2.1 内外一体三维数字模型
白云站站台数字孪生系统搭建主要分为无人机数据采集、激光扫描仪数据采集、点云数据融合、三维模型重建等四部分。首先使用无人机倾斜摄影技术对建筑物外部进行拍摄,再使用三维激光扫描技术对建筑物内部进行扫描,对影像数据进行配准对齐,最后使用三维重建软件将配准后的内部点云数据和外部影像数据进行融合,生成建筑物的全面三维模型。
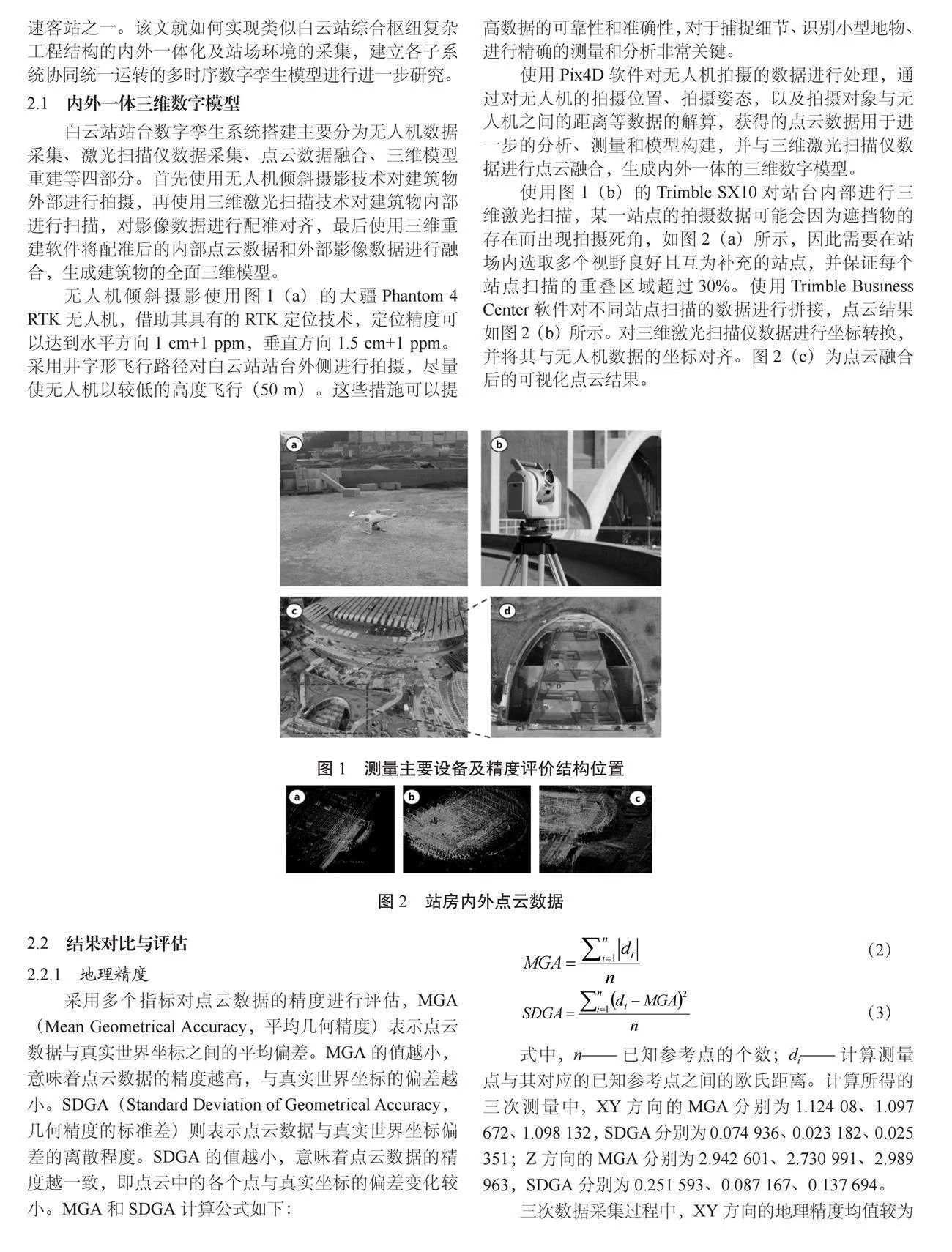
无人机倾斜摄影使用图1(a)的大疆Phantom 4 RTK无人机,借助其具有的RTK定位技术,定位精度可以达到水平方向1 cm+1 ppm,垂直方向1.5 cm+1 ppm。采用井字形飞行路径对白云站站台外侧进行拍摄,尽量使无人机以较低的高度飞行(50 m)。这些措施可以提高数据的可靠性和准确性,对于捕捉细节、识别小型地物、进行精确的测量和分析非常关键。
使用Pix4D软件对无人机拍摄的数据进行处理,通过对无人机的拍摄位置、拍摄姿态,以及拍摄对象与无人机之间的距离等数据的解算,获得的点云数据用于进一步的分析、测量和模型构建,并与三维激光扫描仪数据进行点云融合,生成内外一体的三维数字模型。
使用图1(b)的Trimble SX10对站台内部进行三维激光扫描,某一站点的拍摄数据可能会因为遮挡物的存在而出现拍摄死角,如图2(a)所示,因此需要在站场内选取多个视野良好且互为补充的站点,并保证每个站点扫描的重叠区域超过30%。使用Trimble Business Center软件对不同站点扫描的数据进行拼接,点云结果如图2(b)所示。对三维激光扫描仪数据进行坐标转换,并将其与无人机数据的坐标对齐。图2(c)为点云融合后的可视化点云结果。
2.2 结果对比与评估
2.2.1 地理精度
采用多个指标对点云数据的精度进行评估,MGA(Mean Geometrical Accuracy,平均几何精度)表示点云数据与真实世界坐标之间的平均偏差。MGA的值越小,意味着点云数据的精度越高,与真实世界坐标的偏差越小。SDGA(Standard Deviation of Geometrical Accuracy,几何精度的标准差)则表示点云数据与真实世界坐标偏差的离散程度。SDGA的值越小,意味着点云数据的精度越一致,即点云中的各个点与真实坐标的偏差变化较小。MGA和SDGA计算公式如下:
(2)
(3)
式中,n——已知参考点的个数;di——计算测量点与其对应的已知参考点之间的欧氏距离。计算所得的三次测量中,XY方向的MGA分别为1.124 08、1.097 672、1.098 132,SDGA分别为0.074 936、0.023 182、0.025 351;Z方向的MGA分别为2.942 601、2.730 991、2.989 963,SDGA分别为0.251 593、0.087 167、0.137 694。
三次数据采集过程中,XY方向的地理精度均值较为稳定,均在1.1附近,Z方向的第二次地理精度较高,比第一次和第三次精度分别高出7.19%和8.66%。总体来说,三次测量的定位精度均为良好,可为三维实景模型的建立提供可靠数据。
2.2.2 模型精度
精度评价指标包括中误差、对数中误差、平均中误差、相对中误差。该文使用中误差(RMSE)作为精度指标。即:
(4)
式中,Z——真值;z——观测值或计算值;n误差个数。
对站台东侧入口楼梯结构如图1(c)、图1(d)所示的4处位置进行实地测量,测得的距离真值分别为A(7.672 m)、B(7.364 m)、C(9.931 m)、D(11.445 m)。在TBC软件中选取三维实景模型中对应特征边的尺寸,每段长度测量三次,取三次的平均值作为模型长度。将模型长度与实际距离真值进行比对,计算每次测量时的RMSE,结果如表1所示:
由表1数据可以得知,不同阶段建立的三维实景模型精度质量都很高,达到了厘米级精度标准,满足地形测绘中的1∶100 0地形图测绘的质量要求,也满足一般工程结构的建模需求。
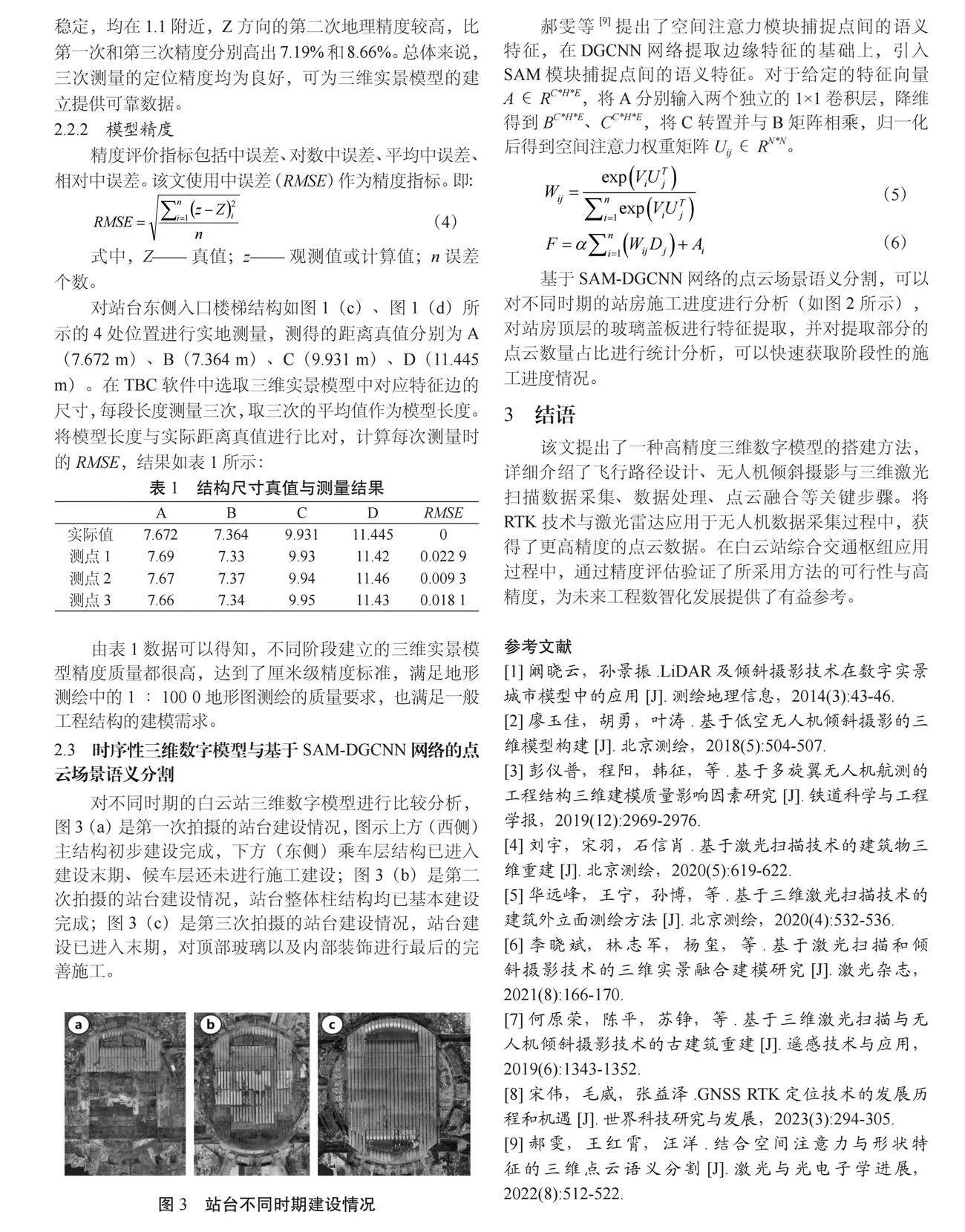
2.3 时序性三维数字模型与基于SAM-DGCNN网络的点云场景语义分割
对不同时期的白云站三维数字模型进行比较分析,图3(a)是第一次拍摄的站台建设情况,图示上方(西侧)主结构初步建设完成,下方(东侧)乘车层结构已进入建设末期、候车层还未进行施工建设;图3(b)是第二次拍摄的站台建设情况,站台整体柱结构均已基本建设完成;图3(c)是第三次拍摄的站台建设情况,站台建设已进入末期,对顶部玻璃以及内部装饰进行最后的完善施工。
郝雯等[9]提出了空间注意力模块捕捉点间的语义特征,在DGCNN网络提取边缘特征的基础上,引入SAM模块捕捉点间的语义特征。对于给定的特征向量A∈RC*H*E,将A分别输入两个独立的1×1卷积层,降维得到BC*H*E、CC*H*E,将C转置并与B矩阵相乘,归一化后得到空间注意力权重矩阵Uij∈RN*N。
(5)
(6)
基于SAM-DGCNN网络的点云场景语义分割,可以对不同时期的站房施工进度进行分析(如图2所示),对站房顶层的玻璃盖板进行特征提取,并对提取部分的点云数量占比进行统计分析,可以快速获取阶段性的施工进度情况。
3 结语
该文提出了一种高精度三维数字模型的搭建方法,详细介绍了飞行路径设计、无人机倾斜摄影与三维激光扫描数据采集、数据处理、点云融合等关键步骤。将RTK技术与激光雷达应用于无人机数据采集过程中,获得了更高精度的点云数据。在白云站综合交通枢纽应用过程中,通过精度评估验证了所采用方法的可行性与高精度,为未来工程数智化发展提供了有益参考。
参考文献
[1]阚晓云,孙景振.LiDAR及倾斜摄影技术在数字实景城市模型中的应用[J].测绘地理信息,2014(3):43-46.
[2]廖玉佳,胡勇,叶涛.基于低空无人机倾斜摄影的三维模型构建[J].北京测绘,2018(5):504-507.
[3]彭仪普,程阳,韩征,等.基于多旋翼无人机航测的工程结构三维建模质量影响因素研究[J].铁道科学与工程学报,2019(12):2969-2976.
[4]刘宇,宋羽,石信肖.基于激光扫描技术的建筑物三维重建[J].北京测绘,2020(5):619-622.
[5]华远峰,王宁,孙博,等.基于三维激光扫描技术的建筑外立面测绘方法[J].北京测绘,2020(4):532-536.
[6]李晓斌,林志军,杨玺,等.基于激光扫描和倾斜摄影技术的三维实景融合建模研究[J].激光杂志,2021(8):166-170.
[7]何原荣,陈平,苏铮,等.基于三维激光扫描与无人机倾斜摄影技术的古建筑重建[J].遥感技术与应用,2019(6):1343-1352.
[8]宋伟,毛威,张益泽.GNSS RTK定位技术的发展历程和机遇[J].世界科技研究与发展,2023(3):294-305.
[9]郝雯,王红霄,汪洋.结合空间注意力与形状特征的三维点云语义分割[J].激光与光电子学进展,2022(8):512-522.