
智能监测系统在暗挖下穿既有地铁车站中的应用
2024-09-25 00:00:00徐东风蔡乾广王俊杰
河南科技 2024年15期
摘 要:【目的】为了保障暗挖下穿施工时既有运营地铁车站的结构安全,需要对新建7号线中胜站暗挖下穿既有10号线中胜站的监测点位布设及实时监测技术进行研究。【方法】在同结构同断面所布设的监测点使用不同的技术设备进行监测,对比监测数据精度和数据提供及时性,分析既有车站整体结构不同位置沉降监测点的布设方式,以及智能监测系统实时监测技术设备的采集、传输、储存与管理数据的能力。【结果】研究结果表明,车站虽为整体结构,但不同位置沉降变化量存在差异,智能监测系统较好地实现了测量机器人与静力水准仪数据的整合,能确保暗挖下穿项目实时监测数据的分析与传输。【结论】本研究将智能监测系统运用到地铁暗挖下穿项目的地铁保护监测中,为以后暗挖下穿项目提供参考。
关键词:实时监测;点位布设;智能监测系统;暗挖下穿
中图分类号:U231 文献标志码:A 文章编号:1003-5168(2024)15-0070-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.15.016
The Application of Intelligent Monitoring System in Underground
Excavation of Existing Subway Stations
XU Dongfeng CAI Qianguang WANG Junjie
(Nanjing Metro Operation Co., Ltd., Nanjing 210012, China)
Abstract: [Purposes] In order to ensure the structural safety of the existing operating subway station during the construction of underground excavation, it is necessary to study the monitoring point layout and real-time monitoring technology of the underground excavation of the existing Zhongsheng station of line 10 by the newly built Zhongsheng station of line 7. [Methods] Different technical equipment is used to monitor the monitoring points laid out in the same structure and section, and the accuracy of monitoring data and the timeliness of data provision are compared.And then, this paper and analyzes the layout method of the settlement monitoring points at different positions of the overall structure of the station and the rapid data acquisition, transmission, storage and management capabilities of the real-time monitoring technology equipment of the intelligent monitoring system. [Findings] The results show that although the station is the overall structure, there are differences in the amount of settlement change at different positions. The intelligent monitoring system can better realize the integration of the data of the measuring robot and the static level, and can ensure the analysis and transmission of the real-time monitoring data of the underground excavation project.[Conclusions] The intelligent monitoring system can be applied to the monitoring of subway tunneling project, which can provide reference for future tunneling projects.
Keywords: real-time monitoring; points layout; intelligent monitoring system; underground excavation
0 引言
近年来,随着地铁网络化建设的快速发展,穿越既有运营地铁车站的新建地铁线路施工逐步成为地铁建设的常态[1-3]。由于地铁线路前期没有规划到位或者规划发生变化等原因,导致换乘站的既有车站没有预留接口或者没有理想的预留接口,同时后建车站施工也会对既有车站产生破坏。目前,新建地铁线路下穿既有运营地铁线路项目越来越多,施工时既要保障新线路施工安全,也要保障既有线路运营安全[4-5],这就需要更为先进的实时监测技术以便为地铁施工提供更全面、及时、准确的监测数据。
1 工程概况
1.1 结构概况
新建地铁7号线中胜站为地下二层(局部三层)岛式车站,双柱三跨矩形框架结构,柱距为9 m,采用明挖法(局部暗挖法)施工,站厅在地下一层,站台在地下二层,新建地铁7号线中胜站车站主体基坑分为三期施工。
1.2 新建车站与既有车站位置关系及地质情况
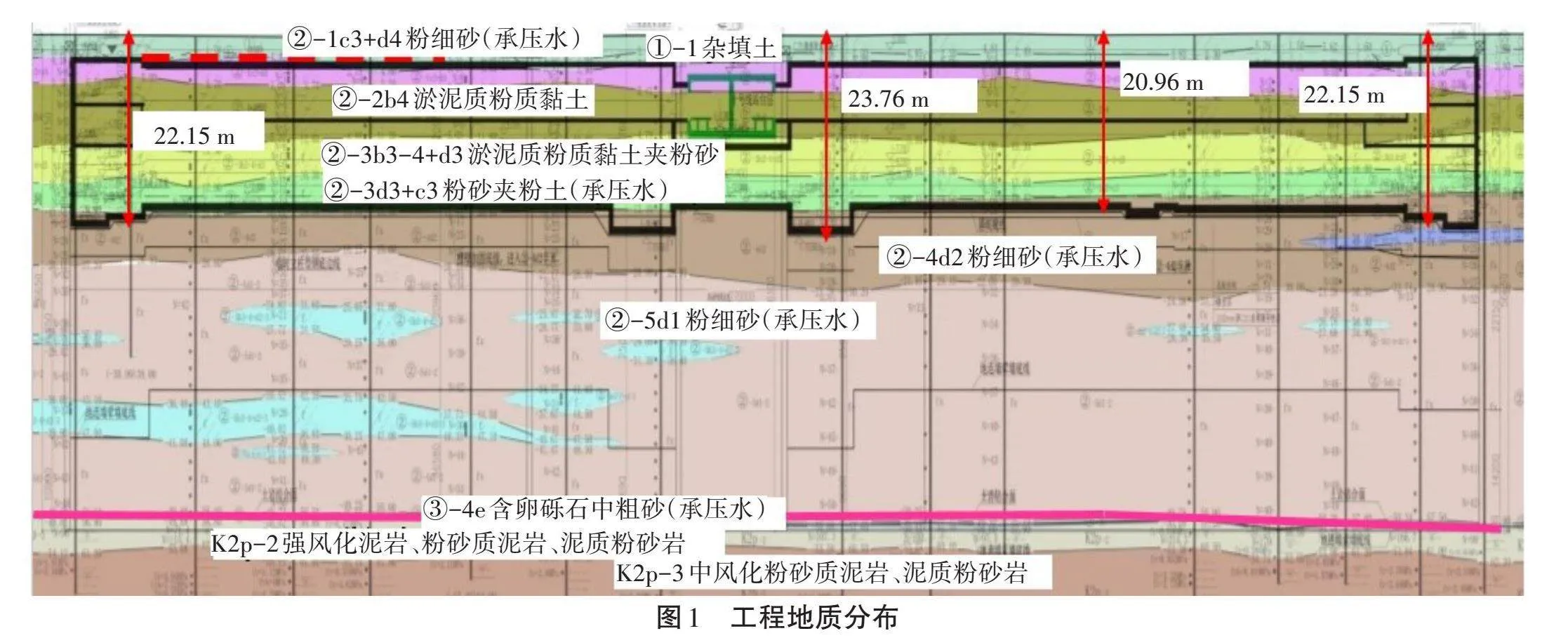
7号线中胜站地连墙外边线与既有10号线中胜站围护结构φ850@600SMW工法桩距离为0.35 m。7号线与既有10号线中胜站厅~台式换乘,既有10号线中胜站单层段与7号线中胜站单层段竖向最近约0.6 m,且换乘通道与既有10号线附属结构相接,与主体结构距离最近为2.5 m。新建车站与既有车站地质情况如图1所示。
2 监测技术
2.1 多元传感器系统
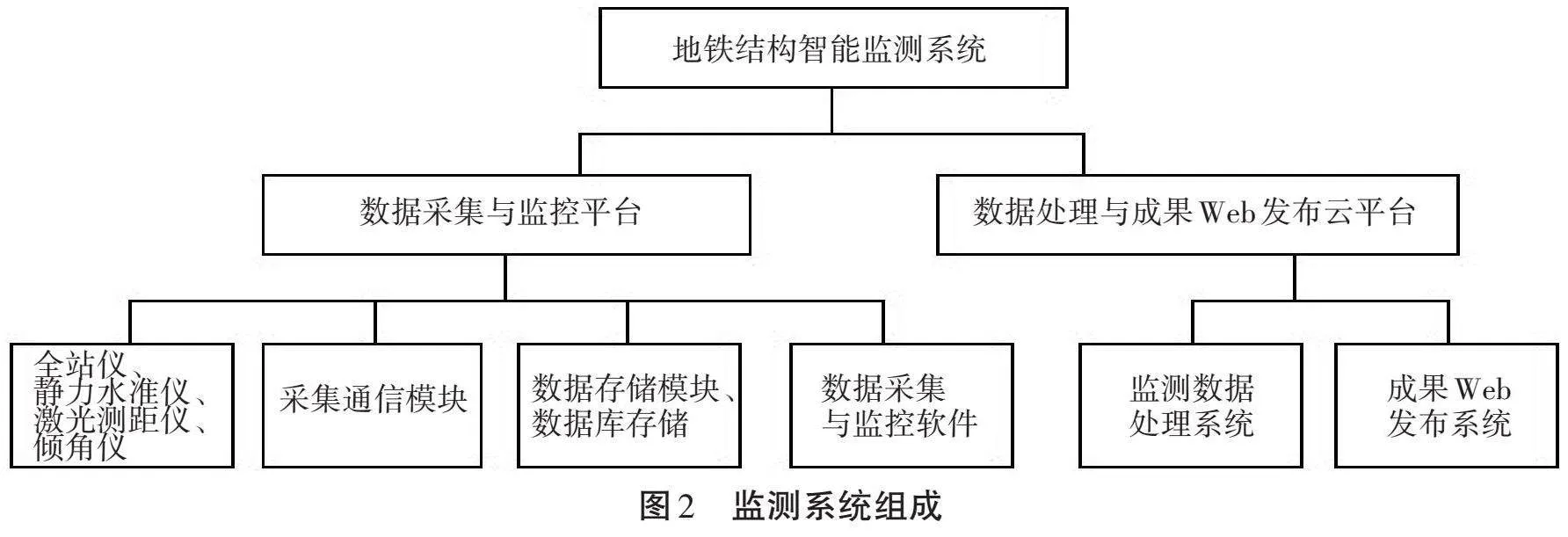
监测系统主要包含3个子系统,即数据采集子系统、数据分析处理子系统和成果Web发布子系统,每个子系统均包含特定的功能,系统组成如图2所示。
监测系统可以通过云平台对监测成果进行实时发布、查询、数据分析、数据下载,以及基于神经网络模型、时光序列灰色模型等多种结构变形预测组合模型对监测成果进行预测,同时具有及时发布预警信息等功能,可以为地铁结构监测提供及时准确的预警信息,以保障地铁结构安全。
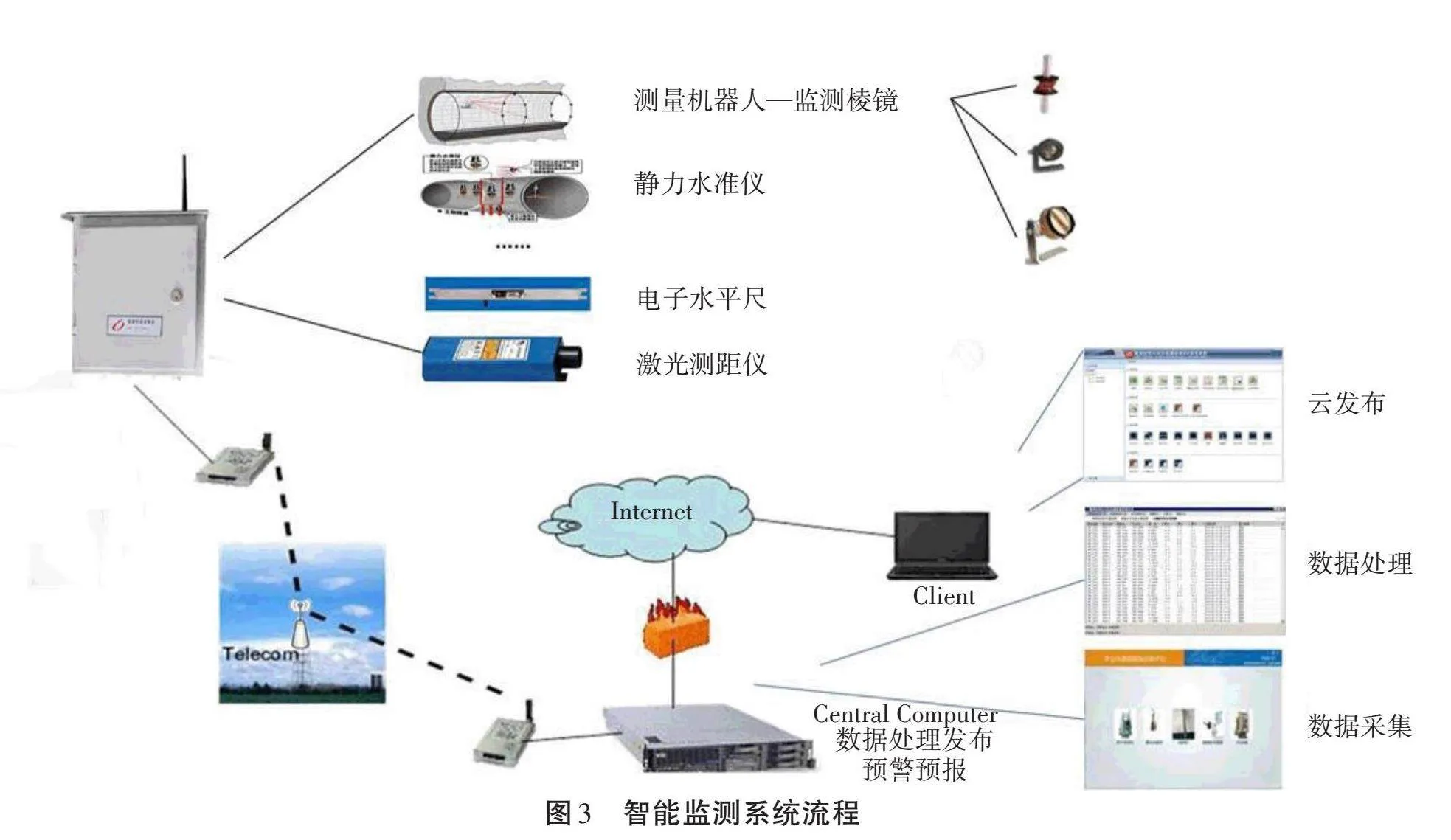
根据监测范围、地铁线路走向、本项目对应段隧道既有变形情况,结合项目平纵断面关系、隧道现场实际情况以及监测项目施工期间对地铁结构可能存在的影响,本项目使用4台徕卡TM50智能型全站仪对地铁结构的垂直位移和水平位移实施自动化监测(上下行线各2台);采用56台静力水准仪对车站下穿施工段进行自动化监测。全面普查测量影响范围内隧道结构,结合地铁结构变形速率,实施动态监测。地铁结构智能化监测系统是具有高精度、高稳定性,并且可以实时发布监测结果及数据分析的自主研发系统。智能监测系统流程如图3所示。
2.2 Leica测量机器人
高精度瑞士 Leica 测量机器人( 0. 5″,0. 6+1ppm) ,能够实现数据的快速采集、传输、储存与管理。数据处理系统采用基准点稳定性判定 VT 检验方法,能够有效提高平差计算的精度和可靠性[6]。
2.3 监测网的布设
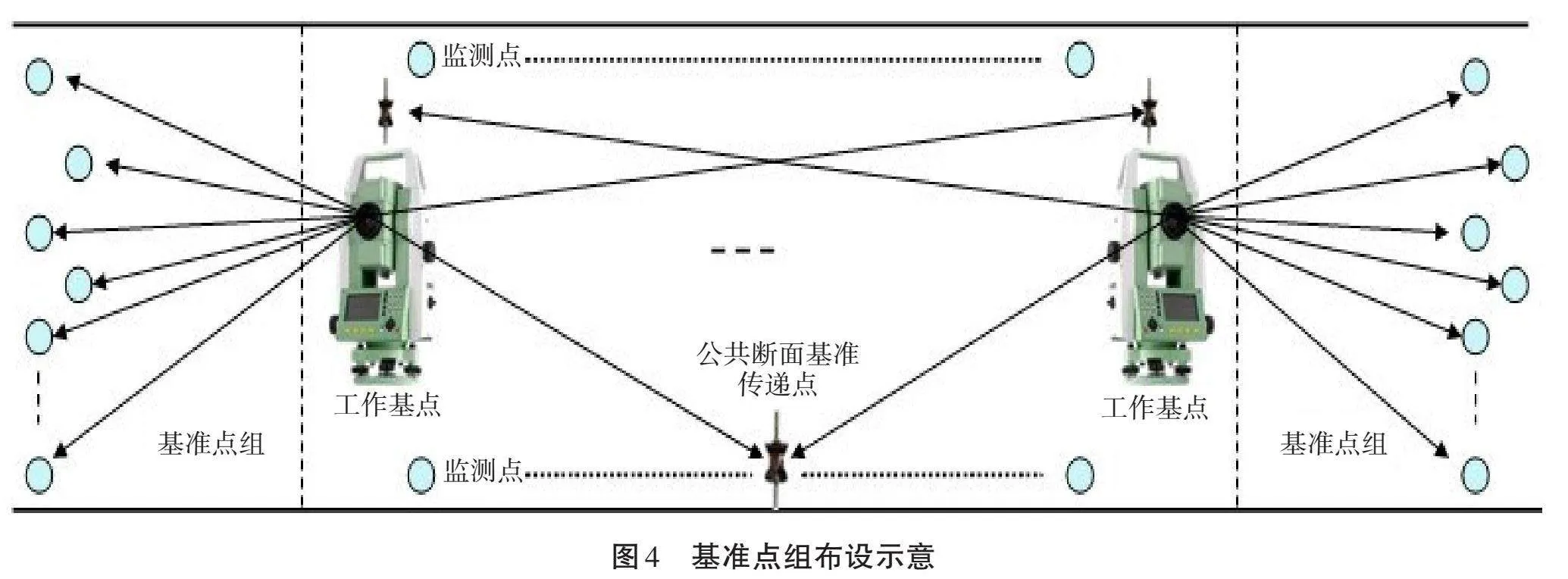
2.3.1 基准点的布设。测量机器人基准点应选在稳定可靠的位置,考虑到测量机器人存在精度内实际有效监测距离,基准点不能距离监测区域过远,该项目基准点布设在小行站到元通站区间隧道内距离监测变形区60~80 m的位置处,该处在变形影响区域以外比较稳定。上下行线各布设2个基准点组(JJZ1、JJZ2、JJY1、JJY2),每个基准点组含8个L型小棱镜基准点。基准点组布设如图4所示。
2.3.2 工作基点(测站点)的布设。结合以往项目经验,自动化监测系统根据隧道内全站仪(±0.5″,±0.6 mm+1 ppm)的标称精度和实测数据比较分析,在测量距离150 m内,测量精度在±0.1 mm的范围内,符合《城市轨道交通工程测量规范》中关于监测精度的相关要求[7]。考虑隧道内现场环境复杂、地铁线路走向含有曲线、监测范围远等因素,本项目共布设了4个工作基点,上下行线各布设两个。安装具有防盗避震功能的强制对中支架,以保证测量机器人能够稳定采集监测数据。考虑精度要求,测量机器人视线范围要控制在150 m左右,但该项目由于监测范围相对较长,基准点布设在稳定区域距离较远,1个工作基点明显满足不了精度要求,所以根据精度要求,每条线至少要布设两个工作基点。
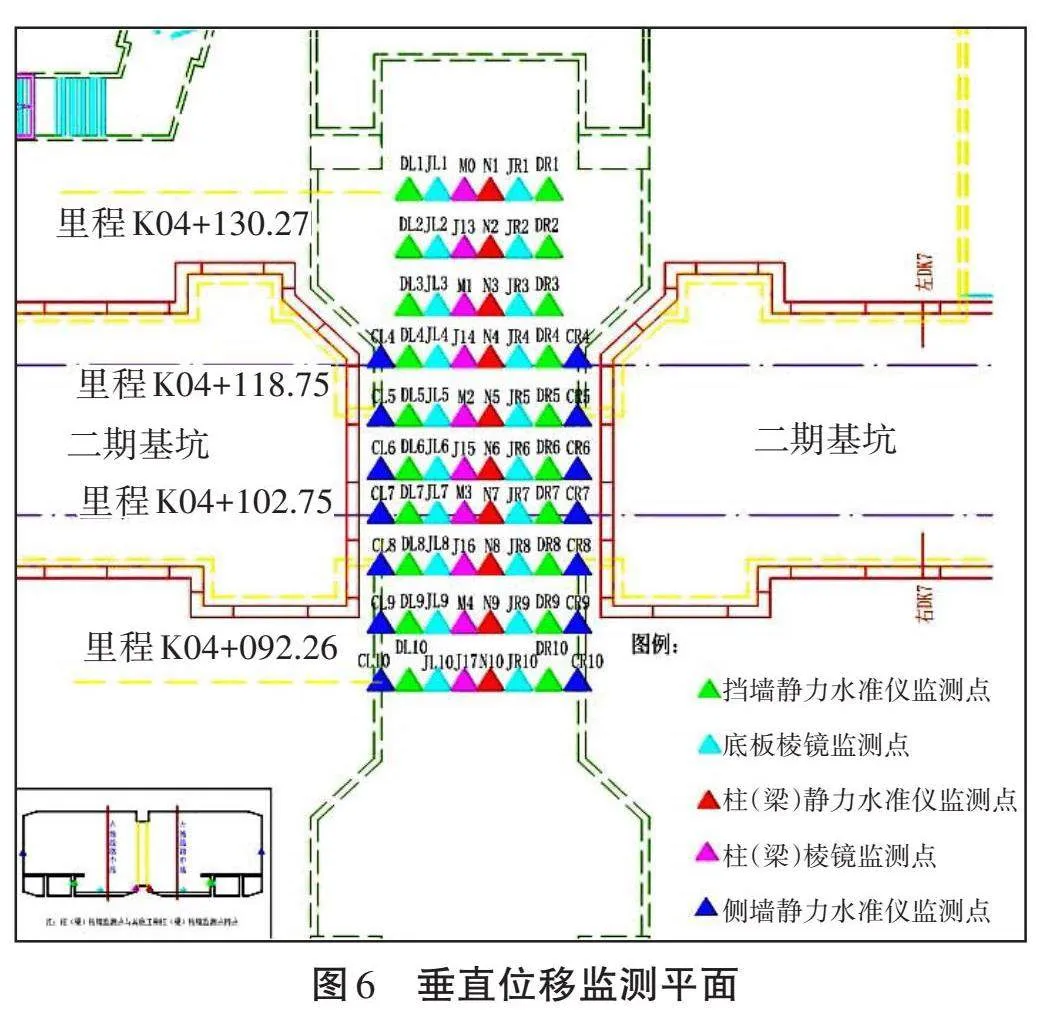
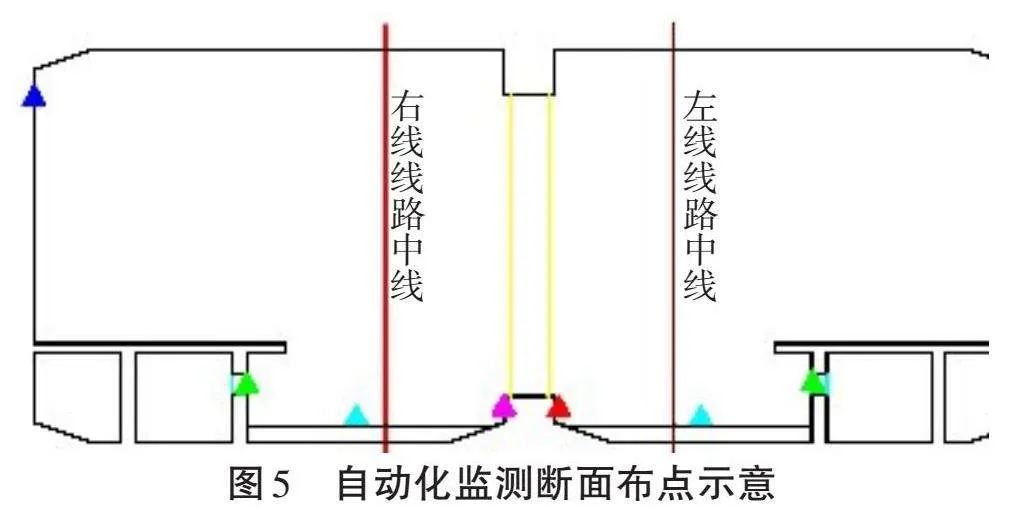
2.3.3 监测点的布设。垂直位移监测:全站仪自动化垂直位移监测包含道床、结构柱、区间隧道框架墙、轨行区底板垂直位移监测等测项,暗挖下穿段两个导洞宽度约9 m,两个导洞间隔4 m,在每个导洞正上方布设3个监测断面,沿两个导洞外侧每隔5 m各外延两个监测断面,共计布设10个监测断面。每个监测断面布设8个垂直位移监测点,因受现场复杂环境限制以及车站结构不同的影响,8个垂直位移监测点不能完全布设于车站底板。为了确保更准确地反映既有车站结构形变情况以及各结构之间差异形变情况,沉降监测点布设位置有上下行线轨行区道床(前期基坑开挖时已经布设监测点,图中未绘出)、上下行线轨行区底板、上下行线中间的立柱冠梁、轨行区两侧隔墙、车站站台两侧侧墙布设监测点。上下行线轨行区底板各布设1个监测点,监测点采用打孔埋设监测棱镜的方式;立柱冠梁两侧监测点分别布设1台静力水准仪、1个监测棱镜;轨行区两侧隔墙底部各埋设1台静力水准仪,车站站台两侧侧墙与站台交接处各布1台静力水准仪,具体布设位置如图5所示。监测棱镜采用徕卡测量机器人自动化监测方法,静力水准监测点采用静力水准仪自动化监测方法。详细布点如图6所示。
2.4 静力水准仪自动化监测
根据监测范围、地铁线路走向、工程项目对应区段隧道既有变形情况,结合工程项目平纵断面关系、隧道现场实际情况及监测施工期间可能对地铁结构造成的影响,本工程采用56台静力水准仪,对暗挖下穿区段对应既有中胜车站底板垂直位移进行监测。静力水准仪采用电容式传感器,根据连通管原理对各测点容器内液面的相对变化进行测量,然后通过计算求得相对于基点的各点沉降量。仪器由连通管、主体容器、电容传感器等部分组成。
2.5 静力水准仪的布设
2.5.1 基准点的布设。静力水准仪基准点布设在监测区域以外隧道内的稳定区域,是为了建立自动化和人工数据的联系,方便后期分析数据。静力水准仪的基准点布设在小~中区间矿山隧道的侧墙上,人工沉降工作基准点布设在静力水准仪基准点同断面的道床上方便后期联测。人工沉降的基准点布设在靠近小行车站的高架墩位置,以保证基准点的稳定性。
为了保证静力水准自动化基准点的高程准确,基准点静力水准仪(JSZ1、JSZ2、JSY1、JSY2)与道床垂直位移基准点(JD1、JD2、JD3)15 d左右需要联测一次,通过联测来判定静力水准仪自动化基准点的稳定性。
2.5.2 监测点的布设。该项目下穿段静力水准仪自动化监测共布设5条路线,分别为轨行区内的上下行线隔墙,中间冠梁和立柱以及上下行线的站台侧墙上。根据静力水准仪的原理布设监测点需要考虑纵坡与量程,一条线至少需要分两组布设。车站站台侧墙在正对应区段K4+090 m~K4+118 m监测范围内,每隔5 m布设一个监测点,上下行站台侧墙共布设14个点位。车站侧墙静力水准仪采用固定支架固定在站台侧墙顶部位置上,由于站台侧墙表面安装有装饰板,因此应拆除监测点位对应位置最上方的装饰板,从K4+092 m对应位置开始,每隔3块装饰板拆除1块以安装静力水准仪。静力水准仪高度约20 cm,离地面高度约2.5 m ,突出墙面约20 cm,应做好安全防护工作。静力水准仪安装好后,用连通管依次连接相邻的传感器。连通管高度应略低于静力水准仪,将其固定在车站侧墙上,经过扶梯出入口时,连通管沿立柱悬挂于离地面2.5 m高度的空中,通过站台端门顶部的缝隙后沿侧墙固定连接到区间隧道,连通管材质为绝缘材料,直径小于2 cm,不会影响站台端门的运行。
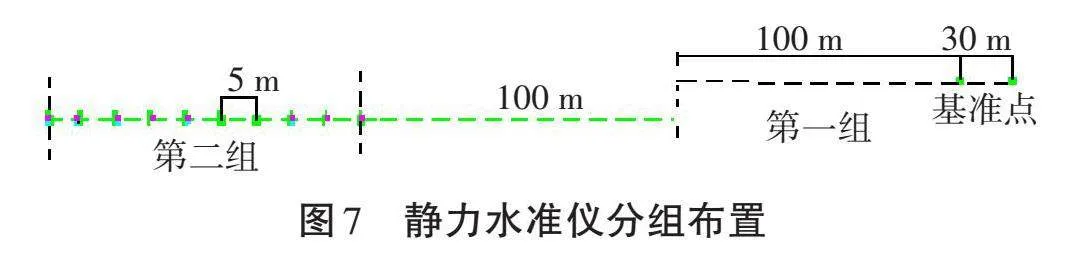
轨行区上行线与立柱冠梁静力水准点构成一条静力水准路线,轨行区上行线和立柱冠梁各布设10台静力水准仪,整个监测线路由于电梯遮挡等原因需要布设2个转点,沿着轨行区两侧挡墙每隔5 m布设一台静力水准仪。静力水准仪分组布置如图7所示。轨行区下行线布设方式与上行线一致。由于暗挖下穿段施工风险较大,将静力水准仪自动化监测数据与人工监测数据及全站仪自动化监测数据进行全面分析,确保数据准确可靠。
3 沉降数据分析
3.1 自动化设备监测数据差异
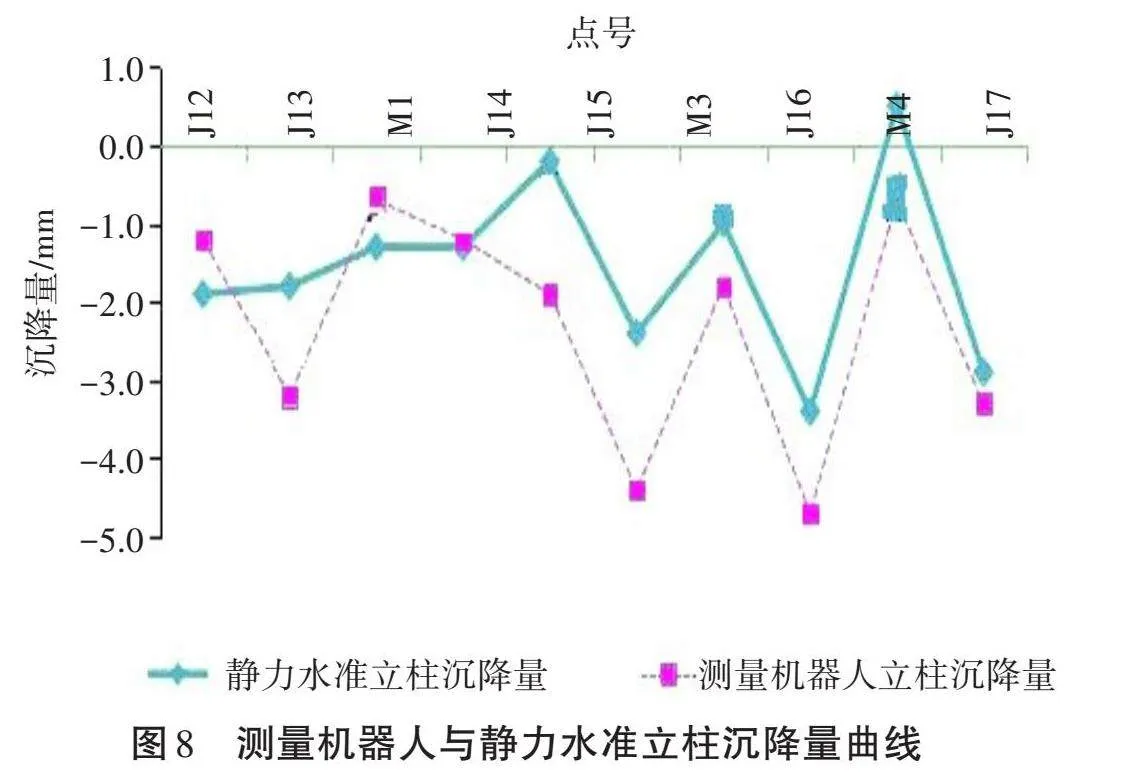
二期基坑暗挖施工时间为2021.3.26—2021.6.1(历时67 d),为及时反馈地铁结构变形情况监测频率调整为4 h/次。二期基坑暗挖段主体结构及融沉注浆时间为2021.6.2—2021.10.17(历时139 d),监测频率为1 d/次。10号线中胜站为侧式车站,上下行线轨道中间有结构柱(立柱),具体情况如图5所示,同根结构柱上下行线两侧,一侧布设棱镜,一侧布设液体静力水准。二期基坑暗挖段施工到二期基坑暗挖段主体结构及融沉注浆施工阶段结构柱,两种自动化监测设备累计沉降数据情况如图8所示。从图8可以看出,二期基坑整个暗挖施工过程中结构柱垂直位移最大变化量为-4.7 mm(测量机器人数据),位置处于暗挖下穿段正下方。暗挖下穿整个监测周期测量机器人与静力水准仪数据差值基本在±1 mm以内,最大差值为2.0 mm(仅有一个点超过2 mm),静力水准仪监测数据与徕卡TM50测量机器人监测数据整体趋势一致,整体差值较小,能够及时准确地反映车站结构变化情况。
3.2 道床与车站底板数据差异
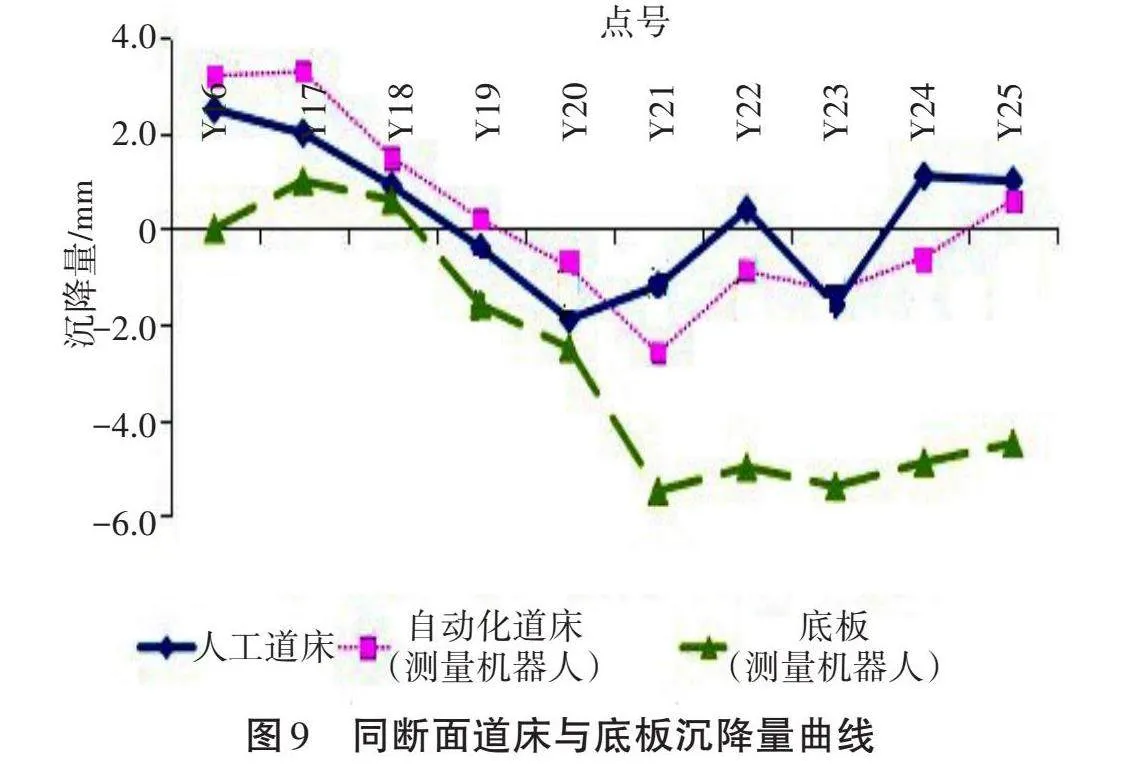
暗挖过程中同断面道床监测点人工(传统的二等水准)监测数据与测量机器人的数据,以及道床底板测量机器人的监测数据沉降曲线如图9所示。由图9可知,整个暗挖过程中人工道床监测数据与测量机器人道床监测数据基本一致,但是与道床底板监测数据从Y21~Y25号点开始存在明显差异。后期利用道床钻芯取样的测量方法,确定中胜站该段道床与底板存在约3 mm的脱空。因为道床为二次浇筑结构,当车站底板与道床存在脱空时,道床沉降量不能反映车站主体结构的沉降变形情况,需要在车站底板位置布设监测点。
3.3 各结构监测点数据变化
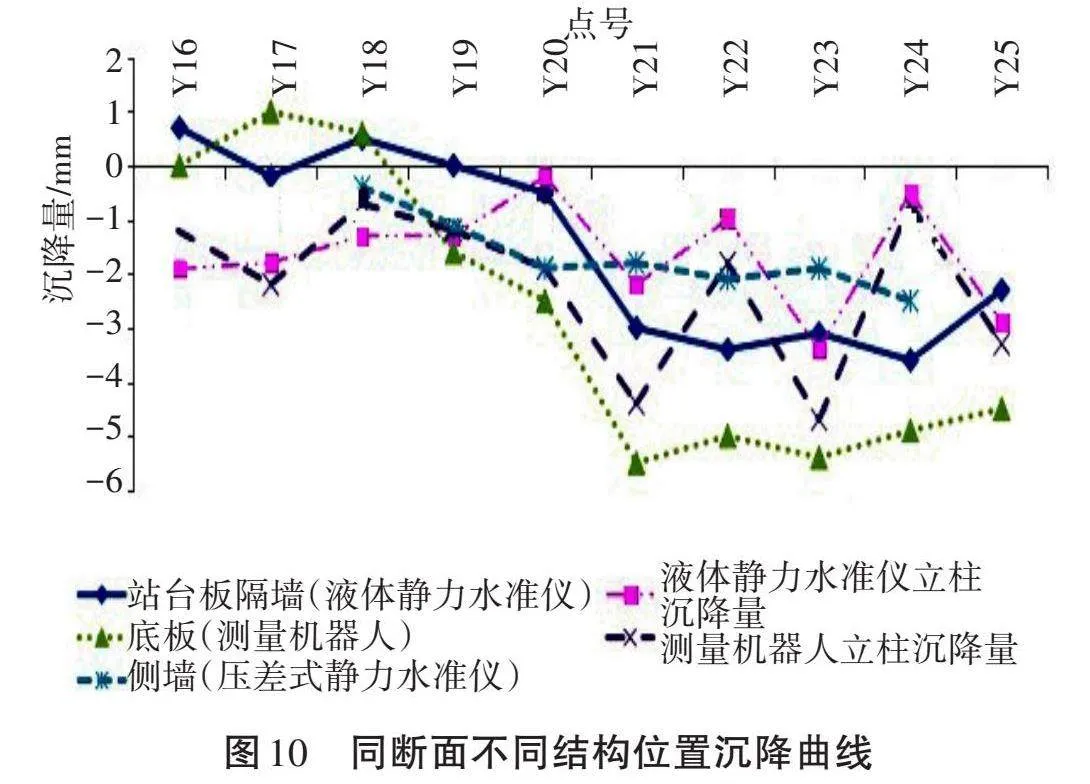
结构柱、区间隧道框架墙、侧墙、轨行区底板垂直位移等测项暗挖施工阶段的累计变化量曲线如图10所示。
因为既有车站是运营车站,考虑到列车运营及站台上乘客安全、美观等原因,各结构的自动化监测设备的选择非常重要。站台侧墙因为考虑外表装饰及乘客安全选择体积较小的压差式静力水准仪,区间隧道框架墙选择液体静力水准仪,结构柱选择徕卡测量机器人和液体静力水准仪,轨行区底板选择徕卡测量机器人。由图10可知,各结构沉降变化趋势基本一致,在一定程度上都能反映车站整体的变化情况,各个位置由于自动化监测设备的不同,监测基准点高程值的相互转换、点位布设位置、仪器的测量误差等原因,使得各个结构的沉降变化量还是存在差异,其中最大差值达4.2 mm。所以在重大暗挖下穿项目中,单一的测量设备很难保证监测数据的完全、准确、及时。
4 结论
①智能监测系统稳定可靠、精度高,可以实现多种实时监测技术设备的数据快速采集、传输、储存与管理。
②既有车站是运营车站,道床打孔、车站站台装饰板的拆除都需要多方协调,整个过程时间较长,为了保证下穿过程中监测设备及时上线,需要在暗挖前提前做好点位布设以及设备调试工作。
③静力水准仪与徕卡测量机器人同根立柱的实时监测数据差异很小,206 d的测量周期中数据累计沉降差值基本在±1 mm以内,智能监测系统较好地实现了多种自动化监测技术的融合,准确客观地反映了车站变形情况。
④地铁保护监测中传统布设的道床监测点并不能准确地反映车站的垂直位移的变形情况。因为道床为二次浇筑结构,当存在道床脱空时并不能反映实际车站整体变形情况。
⑤对结构柱、区间隧道框架墙、侧墙、轨行区底板垂直位移等进行监测,虽然都能反映下穿过程中的车站垂直位移的变形情况且整体变化趋势一致。但是由于受限于运营车站现有的情况,点位布设结构位置的区别,自动化监测设备也不同,长周期的监测,测量误差等原因,最终累计变化量存在部分差异。
⑥智能监测系统在该项目中解决了结构监测点位布设方式不同、自动化监测技术设备的选择不同造成的数据不统一、不能及时整合分析的问题,及时准确地反映了近距离下穿车站变形的情况,确保了中胜站暗挖施工的安全,为以后重大下穿项目的监测工作提供了一定的参考。
参考文献:
[1]杨凤梅,叶至盛.成都地铁19号线天府商务区站矩形断面矿山法零距离下穿既有车站施工方案[J].城市轨道交通研究,2022,25(12):171-176.
[2]赵尘衍,刘全海,谢友鹏,等.自动化监测技术在地铁基坑工程监测中的应用[J].城市勘测,2019(1):196-200.
[3]高永,赖衍鹏.基坑上跨盾构隧道实测数据分析及保护研究[J].城市道桥与防洪,2022(1):158-162.
[4]许诚权,贺磊,高永,等. 智能高精度监测在复杂软土地铁隧道加固中的应用[J].福建建设科技,2022(1):89-92.
[5]蔡乾广,李济民,孙俊. 软土夹砂地区近距离桩基施工对地铁盾构隧道的影响及治理[J].勘察科学技术,2020(3):28-31.
[6]邓世舜,陆小勇. 地铁结构保护智能监测系统的研究[J].福建建设科技,2022(1):84-88.
[7]孔繁帆,石岩,智超. 多元监测系统在盾构隧道下穿既有运营地铁中的应用[J].价值工程,2022,41(28):133-135.
