
基于麦克纳姆轮技术的自动化引导车(AGV)设计
2024-09-25 00:00:00冯长业
河南科技 2024年15期
摘 要:【目的】设计一款能在复杂狭小空间内灵活运动,且具有一定承载、搬运货物能力的AGV小车。【方法】首先,将麦克纳姆轮与AGV小车结合,利用麦克纳姆轮独特的全向移动特性,使小车实现任意方向、角度的转动,从而轻松应对各种复杂的运输环境。其次,通过剪叉式机构与丝杠螺母副相结合,同时加上辅助支撑的保险结构,使AGV小车具有一定承载、搬运货物的能力。最后,对AGV小车的电控系统进行分析设计,通过精确控制电机、传感器和导航系统等关键部件,保证对AGV小车实现精准的控制。【结果】麦克纳姆轮与AGV小车的结合能够使小车在各种复杂环境下实现高效、准确的自动化搬运,剪叉式机构与丝杠螺母副相结合的结构设计能使小车具有运输货物的能力,电控系统则保证AGV小车的稳定性。【结论】基于麦克纳姆轮的AGV小车能够应对复杂的工况,灵活地运输货物,极大程度上节约劳动力,节约成本,实现智能化。
关键词:AGV小车;麦克纳姆轮;结构设计;控制系统;自动化
中图分类号:TH122 文献标志码:A 文章编号:1003-5168(2024)15-0031-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.15.007
Design and Research of Automated Guided Vehicle (AGV) Based on
Mecanum Wheel Technology
FENG Changye
(Baosteel Zhanjiang lron & Steel Co., Ltd., Zhanjiang 524000, China)
Abstract: [Purposes] This paper aims to design an AGV car that can move flexibly in complex and narrow spaces, and have a certain load-bearing capacity and the ability to transport goods. [Methods] Firstly, combing the Mecanum Wheel with the AGV car, this paper utilizes the unique omnidirectional movement characteristics of the Mecanum Wheel to enable the car to move in any direction and rotate at any angle, thus easily coping with various complex transportation environments. Secondly, by combining the scissor type mechanism with the screw and nut pair, and adding an auxiliary support safety structure, the AGV car has a certain load-bearing capacity and the ability to handle goods. Finally, the electronic control system of the AGV car was analyzed and designed, ensuring precise control of the AGV car through precise control of key components such as motors, sensors, and navigation systems. [Findings] The combination of Mecanum Wheel and AGV carts enables efficient and accurate automated handling in various complex environments. The structural design of the scissor type mechanism combined with screw and nut pairs enables the carts to have the ability to transport goods. A reasonable electrical control system ensures the stability of the AGV car. [Conclusions] AGV cars based on Mecanum Wheel can cope with complex working conditions and flexibly transport goods, which greatly saves labor and costs, and realizes intelligent operation.
Keywords: AGV trolley; Mecanum wheel; structural design;control system; automation
0 引言
随着全球化进程的不断发展和电子商务的迅速崛起,物流行业迎来了前所未有的发展机遇。作为支撑现代物流体系的核心环节,自动化、智能化技术的应用成为行业转型升级的关键[1-3]。其中,自动导引车作为物流行业中自动化领域的重要设备,其凭借高效、准确、灵活的特性,已经在仓库管理、生产线配送、机场货运等多个领域展现出强大的应用潜力[4-6]。
自动导引车(Automated Guided Vehicle,AGV)是一种配备电磁或光学等自动导引系统,能够遵循设定的导引路径进行行驶,并具备安全保障和多种移载功能的运输车。这种AGV小车可以在工业应用中实现无人驾驶,利用可充电的蓄电池作为动力来源,通过电脑进行控制,指挥其移动方式和行为。具有自动移载装置的AGV小车在控制系统的指挥下能够自动地完成货物的取、放及水平运行的全过程[7-11]。常见的AGV小车类型包括叉车式AGV,这种小车通常用于仓库中的货物搬运和存储;搬运式AGV,这种小车通常具有较大的承载能力和稳定性,适用于搬运重型货物或大型设备;牵引式AGV,这种小车通常用于需要长距离运输或需要与其他设备协同作业的场合,如机场行李牵引、生产线物料搬运等;无人驾驶式AGV,这种小车通过先进的导航和感知技术,能够自主导航、避障,并完成货物的搬运任务[4,12-15]。因此,AGV在制造业、物流业等领域得到了广泛的应用,其可以提高物流效率,减少人力成本,提高生产自动化程度。
麦克纳姆轮这一设计创新,是现代机器人技术的一大突破。麦克纳姆轮的应用为机器人技术带来了革命性的变革,不仅提高了机器人的移动效率和灵活性,还使机器人在复杂的环境中具有更高的适应性和稳定性[16-17]。麦克纳姆轮以其独特的结构和功能,为机器人和自动化设备提供了前所未有的全方位移动能力。在工业自动化、物流配送、医疗护理等领域,麦克纳姆轮都发挥着重要作用,为人类的生产和生活带来了极大的便利。因此,本研究将结合麦克纳姆轮独特的结构和功能设计一款新型的AGV小车,使该小车在各种复杂环境中都能展现出卓越的灵活性和适应性。
1 基于麦克纳姆轮的AGV小车的总体设计
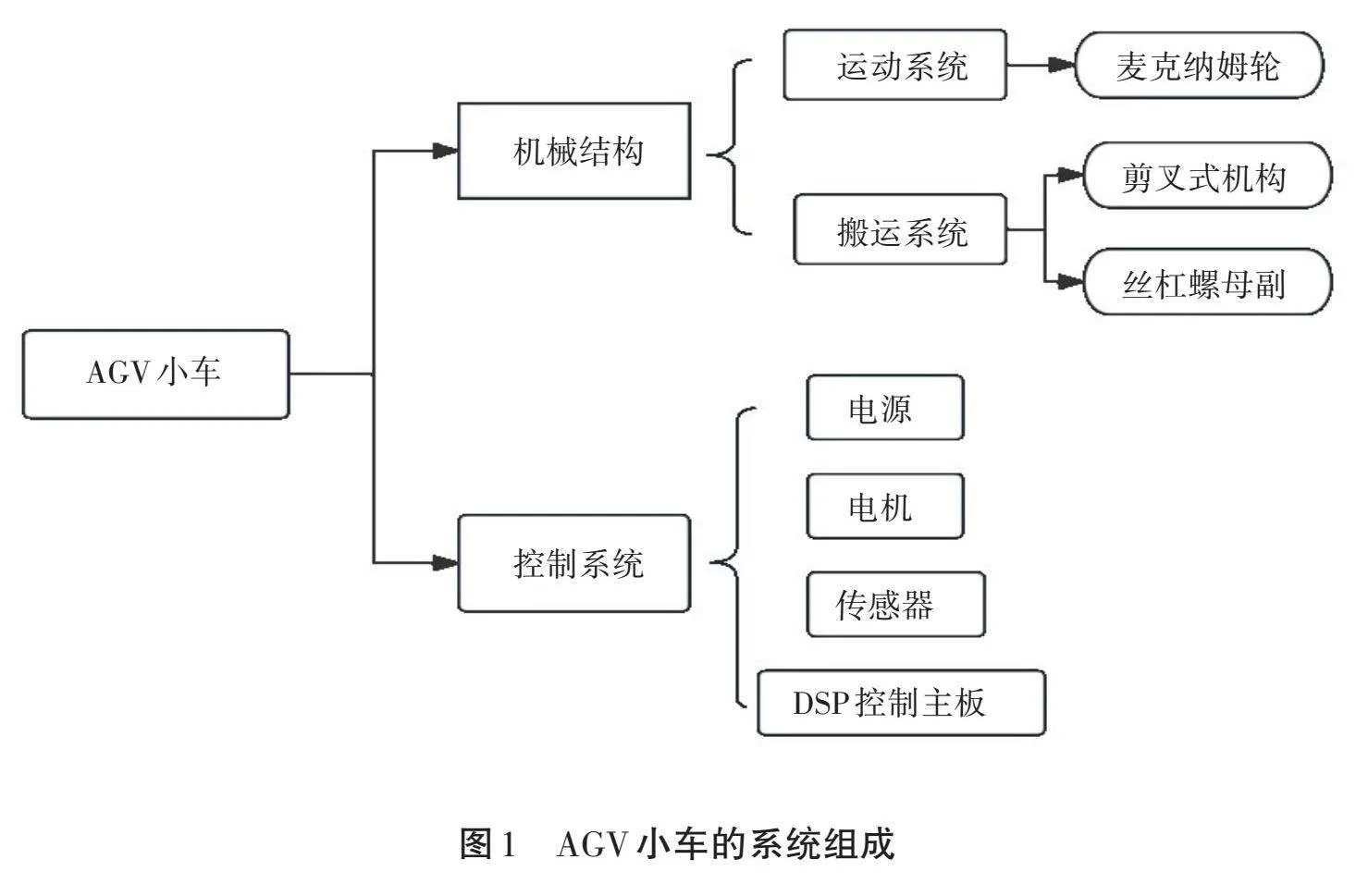
如图1所示,基于麦克纳姆轮的AGV小车的总体设计充分考虑了实际应用场景的需求和性能特点。该AGV小车主要包括机械结构和控制系统两大部分。其中机械结构中的运动系统由麦克纳姆轮系统构成,使AGV小车能够实现全方位移动,从而适应各种复杂的作业环境;搬运系统由剪叉式机构与丝杠螺母副相结合,保证AGV小车具有一定的承载和取/卸货物能力。控制系统主要由电源、电机、传感器及DSP控制主板构成,保证AGV小车性能的可靠性。在总体设计中,本研究注重小车结构的紧凑性、稳定性及易用性,确保小车能够在不同场景下高效、准确地完成物料搬运任务,为物流行业的自动化和智能化发展提供有力的支持。
1.1 机械结构
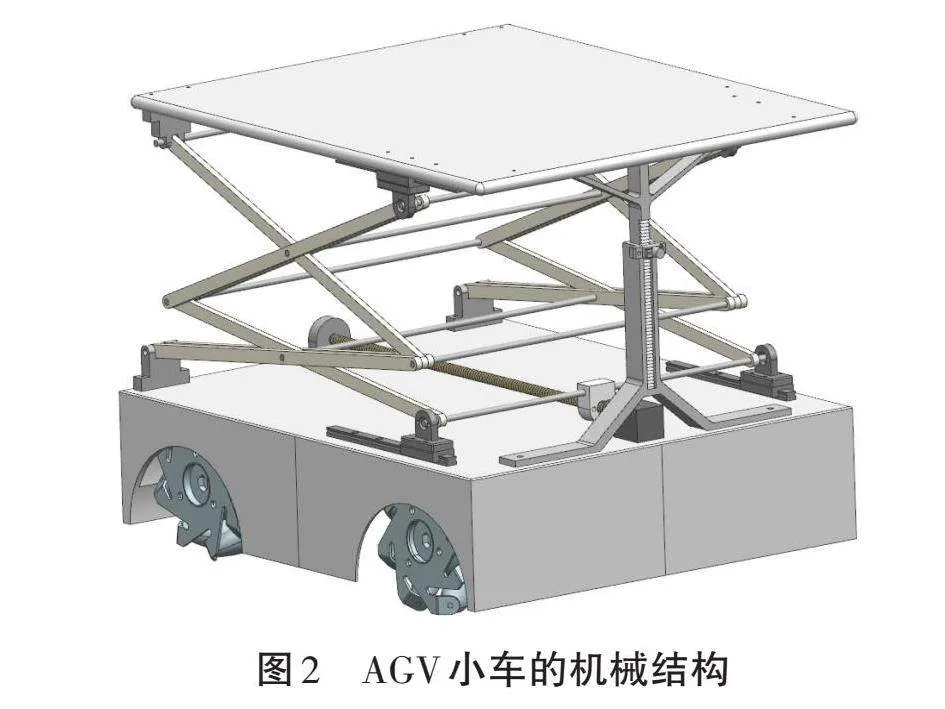
AGV小车的机械结构由运动系统和搬运系统组成。首先,运动性能是机械结构设计中的重要一环。AGV小车的运动性能包括速度、加速度、转向灵活性等。这些性能的提升不仅可以提高小车的运输效率,还能使其更好地适应各种复杂的运行环境。基于麦克纳姆轮的AGV小车机械结构中的运动系统由麦克纳姆轮代替传统的轮子,以实现强大的运动性能。其次,AGV小车的机械结构设计必须考虑其承载和搬运货物的能力。承载能力是指小车在运输过程中所能承受的最大重量。对于承载能力要求较高的场景,如大型仓库、重工业生产线等,剪叉式机构运动平稳、承载能力大等特点能满足使用要求。最后,稳定性也是AGV小车机械结构设计的一个关键要素,不仅关系到小车在运输过程中的安全性,还直接影响到小车运行效率。为了确保小车的稳定性,需要综合考虑小车的尺寸、重量和重心分布等因素。因此,将电机、电源等质量较大的部件合理分布到小车底盘上,可以有效地提高小车的稳定性。合理的机械结构设计可以确保小车在狭窄的空间中灵活运行,提高运输效率,AGV小车的机械结构如图2所示。
1.2 控制系统
AGV小车的控制系统作为AGV小车的大脑,不仅控制着AGV的运动,还负责感知、决策等关键功能。首先,控制系统的设计质量直接决定了AGV小车的性能,而控制系统的设计要素之一就是运动控制。运动控制是AGV小车实现自动导航和搬运功能的基础,通过DSP控制主板精确控制连接着麦克纳姆轮和丝杠螺母副的电机转速与方向,使AGV小车能够在复杂的物流环境中准确、高效地完成任务。其次,感知和决策也是控制系统设计的关键要素。AGV小车通过各类传感器,如激光雷达、红外传感器等,实时获取周围环境的信息。同时,将获取的信息反馈至DSP控制主板上,DSP控制主板则根据感知到的信息,结合预先设定的规则和算法,做出正确的决策,如选择最佳路径、避免障碍物等。感知和决策系统的优劣直接关系到AGV小车在复杂环境中的适应能力和智能化水平。
因此,面对复杂多变的物流环境,本研究目的是设计一款适应性强、稳定性高、运输效率卓越的基于麦克纳姆轮的AGV小车,以满足现代物流运输的多元化需求。基于麦克纳姆轮AGV小车由基于麦克纳姆轮的运动系统、基于剪叉式机构的搬运系统构成。同时,分析并设计合理的控制系统可以保证AGV小车的性能,确保小车在各种应用场景中都能稳定运行,实现高效、安全的物流运输。
2 AGV小车机械结构的子系统
2.1 运动系统
为保证AGV小车能在复杂狭窄的空间里灵活地运动,本次设计将麦克纳姆轮与AGV小车相结合,借助麦克纳姆轮强大的运动能力,实现AGV小车任意方向、角度的移动。
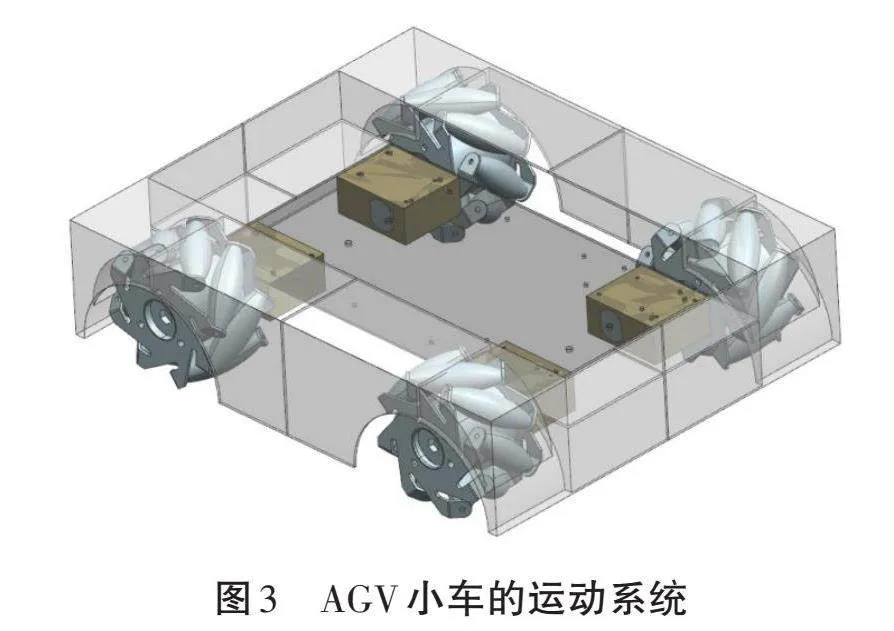
麦克纳姆轮是一种由瑞典麦克纳姆公司(Mecanum AB)发明的全方位移动轮子。这种轮子的控制原理基于其独特的结构和运动方式。麦克纳姆轮的轮缘上斜向分布着许多小轮子,即辊子。这些辊子可以使轮子横向滑移,从而实现全方位移动。当轮子绕着固定的轮心轴转动时,以各个小滚子的包络线为圆柱面,使轮子能够连续地向前滚动。本研究设计的基于麦克纳姆轮的AGV小车运动系统如图3所示。该小车运输系统由麦克纳姆轮、电机和其相关箱体固定结构构成。每个麦克纳姆轮都由单独的电机连接控制,电机由单独的箱体连接固定在底板上,底板与AGV小车上部分机械结构留出空隙,便于小车控制系统的安装。
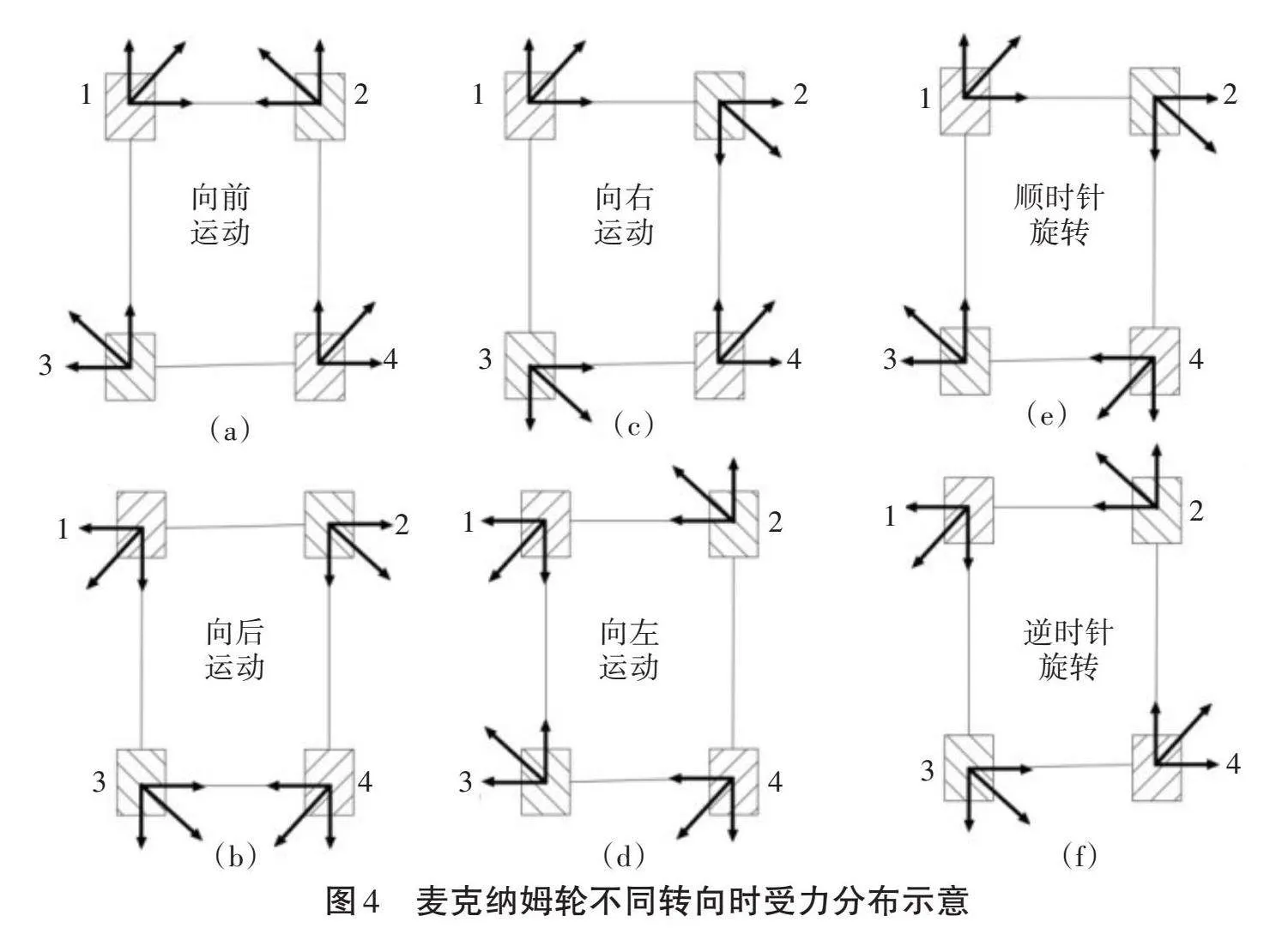
麦克纳姆轮的运动可以看作是三个基本运动的叠加:左右平移、前进后退和旋转。通过控制四个麦克纳姆轮的转速和方向,可以实现平台的全方位移动。具体可以通过以下方式来控制麦克纳姆轮。
①向前运动,如图4(a)所示。使四个麦克纳姆轮都以相同的速度和方向旋转,相邻的两个麦克纳姆轮产生的左右力相互抵消,两轮均提供向前的动力,这样AGV小车就会向前移动。
②向后运动,如图4(b)所示。使四个麦克纳姆轮都以相同的速度和相反的方向旋转,相邻的两个麦克纳姆轮产生的左右力相互抵消,两轮均提供向后的动力这样AGV小车就会向后移动。
③向右运动,如图4(c)所示。使斜对角的两个麦克纳姆轮(1轮和4轮)以相同的速度顺时针旋转,而另一斜对角的两个麦克纳姆轮(2轮和3轮)以相反的速度旋转,此时1轮和3轮一轮产生向前的力,一轮产生向后的力,前后力相互抵消,只留下向右的力。同样2轮和4轮产生向后和向前的力相互抵消,只留下向右的力,这样AGV小车就会向右移动。
④向左运动,如图4(d)所示。使斜对角两个麦克纳姆轮(2轮和3轮)以相同的速度顺时针旋转,而另一斜对角的两个麦克纳姆轮(1轮和4轮)以相反的速度旋转,此时2轮和4轮一轮产生向前的力,一轮产生向后的力,前后力相互抵消,只留下向左的力。同样1轮和3轮产生向后和向前的力相互抵消,只留下向左的力,这样AGV小车就会向左移动。
⑤顺时针旋转,如图4(e)所示。使左侧的两个麦克纳姆轮(1轮和3轮)以相同的速度旋转,而右侧的两个麦克纳姆轮(2轮和4轮)以相反的速度旋转,此时斜对角的两对轮(1轮和4轮、2轮和3轮)均会形成两对顺时针的力矩,这样AGV小车就会顺时针旋转。
⑥逆时针旋转,如图4(f)所示。使右侧的两个麦克纳姆轮(2轮和4轮)以相同的速度旋转,而左侧的两个麦克纳姆轮(1轮和3轮)以相反的速度旋转,此时斜对角的两对轮(1轮和4轮、2轮和3轮)均会形成两对逆时针的力矩,这样AGV小车就会逆时针旋转。
通过精确地控制每个麦克纳姆轮的转速和方向,可以实现AGV小车任意复杂运动的轨迹,如直线、曲线、弧线等。
2.2 搬运系统
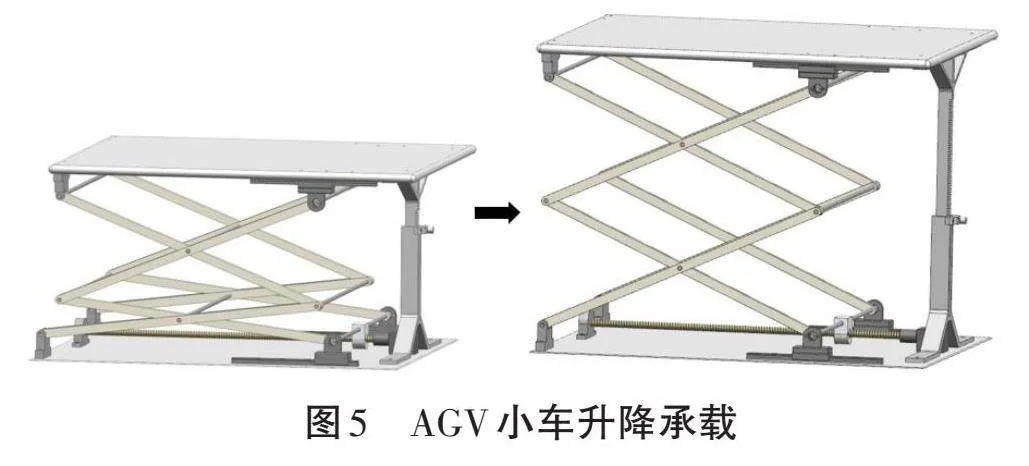
为了保证AGV小车具有一定的承载能力和搬运货物的能力,本次设计考虑将剪叉式升降机构与AGV小车结合。剪叉式机构的优势主要体现在以下几个方面:结构简单,制作容易。这种机构的设计相对简单,制造和装配起来都比较方便,可以降低生产成本和周期;运动平稳,可以实现较大的升降行程。剪叉式机构的运动轨迹是平滑的,因此在升降过程中可以保持平稳,减少振动和冲击。同时,由于其特殊的结构,可以实现较大的升降行程,满足一些特殊场合的需求;承载能力大。由于剪叉式机构在升降过程中可以提供均匀和稳定的支撑,因此能够承受较大的载荷,适用于需要重载的场合;占用空间小。剪叉式机构在折叠状态下占用空间较小,方便存放和运输,适用于一些空间有限的场合[16]。
本次设计将丝杠螺母副、直线导轨及剪叉式机构相结合。当电机转动时,通过联轴器带动丝杠螺母副做直线运动,同时剪叉式机构一端固定,一端与直线导轨和丝杠螺母副连接,实现剪叉式机构的上下运动功能,AGV小车的升降承载如图5所示。在剪叉机构运动的一侧,设计了一个随剪叉式机构上下运动的支撑保险机构,既能在剪叉式机构运动时分担部分承载力,保持AGV小车的平衡,又能在电机突然断电时提供保险作用,避免AGV小车在运输过程中货物突然坠落。
3 AGV小车控制系统的子系统
3.1 电源系统
电源管理是电控系统的基石。稳定的电源供应对于保证电控系统的正常运行至关重要。在选择电源管理模块时,需要着重考虑其质量和稳定性。高质量的电源管理模块能够确保在各种工作条件下,如温度波动、负载变化等,都能提供稳定且准确的电压和电流。此外,为了提高电源的效率和可靠性,还应考虑采用先进的电源管理策略,如动态电压调整、过流保护等。因此,本研究设计的基麦克纳姆轮的AGV小车电源采用型号为3PZS240的铅酸蓄电池,确保为AGV小车提供充足的动力。
3.2 电机系统
电机控制是电控系统的重要组成部分。电机是AGV的动力源,其控制精度和响应速度直接影响AGV的运动性能和定位精度。为了实现对电机转速和转向的精确控制,需要运用先进的控制算法,如PID控制、模糊控制等。同时,高效的驱动电路也是实现精确控制的关键。通过优化驱动电路设计,可以提高电机的驱动效率,降低能耗,并增强系统的稳定性。因此,本研究设计的基于麦克纳姆轮的AGV小车采用型号为D8180-48-4000-20 s的无刷电机,额定电压48 V、额定功率4 000 W。
3.3 传感器系统
传感器系统是AGV小车实现自主导航、避障和定位等功能的关键。本研究选用激光雷达作为小车环境感知的主要工具。激光雷达以其测量结果的精确性、系统的稳定性和能够覆盖较大感知范围的显著优势,在众多传感器中脱颖而出。这些特性使得激光雷达能够在AGV小车面临多变、复杂的环境条件时,依然能够实现高精度导航与定位的要求。为了进一步保障AGV小车的安全行驶和操作的可靠性,还配置了超声波传感器和红外线传感器作为辅助感知设备。通过多种传感器的融合,AGV小车的导航和避障系统将更加稳健,能够适应更加广泛的工作环境和任务需求。
3.4 控制程序
数据处理是电控系统的重要组成部分。随着物流、仓储等行业的快速发展,自动化搬运设备的需求日益增长。作为其中的佼佼者,自动导引车(AGV)因其高效、准确的特点得到了广泛关注。AGV小车的运行离不开其核心程序的控制,而控制程序中的导航算法则是AGV小车能够顺畅运行的关键。AGV小车的控制程序是整个系统的大脑,负责协调小车的各项功能。在设计控制程序时,首先,要明确小车的运动方式,如差速驱动、全向轮驱动等。其次,根据小车的实际运行环境,设计合适的运动控制算法,确保小车能够按照预设路径准确、稳定地移动。最后,控制程序的设计还需考虑小车的速度控制、加速度控制及停车控制等方面,以确保小车的运行平稳、安全。
3.4.1 导航算法的实现。导航算法是AGV小车能够自主导航的关键。目前,常用的导航算法包括基于磁带的导航、基于二维码的导航、基于激光SLAM的导航及基于视觉SLAM的导航等[18]。这些算法各有优缺点,需要根据小车的实际运行环境和需求选择合适的导航方式。在实现导航算法时,需要确保算法的准确性和实时性,以确保小车能够准确地找到目标位置并按照最优路径行驶。
3.4.2 避障算法的应用。避障算法是保障AGV小车安全运行的重要措施。当小车在运行过程中遇到障碍物时,避障算法需要迅速作出反应,指导小车避开障碍物并继续前行。常见的避障算法包括基于规则的避障、基于势场的避障及基于深度学习的避障等。在选择避障算法时,需要综合考虑小车的运行速度、障碍物的大小和形状及运行环境等因素。同时,还需要对避障算法进行充分的测试和优化,以确保其在实际运行中的稳定性和可靠性。传感器是AGV感知外部环境的重要工具,其采集的数据是AGV进行决策的重要依据。基于麦克纳姆轮的AGV小车通过对传感器数据进行实时处理和分析,提取有用的信息,为AGV的决策提供准确的数据支持。此外,为了提高数据处理的速度和准确性,还可以考虑采用高性能的数据处理芯片和先进的算法。
4 结语
本研究通过麦克纳姆轮与AGV小车相结合,设计了一款全新的AGV小车。该AGV小车凭借麦克纳姆轮强大的运动能力,实现在复杂、狭小空间中的灵活移动。凭借剪叉式机构及丝杠螺母副,保证AGV小车具有一定的承载能力和搬运货物的能力。同时,对AGV小车的控制系统进行分析设计,保证AGV小车的性能和可靠性。通过本研究的分析与设计,该基于麦克纳姆轮的AGV小车能够在各种复杂环境下实现高效、准确的自动化搬运,为物流、仓储等行业带来了巨大的便利和效益。未来,随着技术的不断进步和应用需求的不断提升,还会有更加先进、智能的AGV小车问世,为我们的生活和工作带来更多的便利。
参考文献:
[1]郭宏斌.智能化制造中心自动化技术研究与应用[J].模具制造,2024,24(3):167-169.
[2]王雪娇.现代物流管理趋势与发展研究[J].中国物流与采购,2023(20):97-98.
[3]张武保.我国物流业发展特征及政策建议[J].暨南学报(哲学社会科学版),2003(5):45-50.
[4]陈俊彬.AGV小车的发展现状研究[J].科技资讯,2023,21(15):237-240.
[5]SHI J Q.Laser guided four-wheel drive AGV trolley[J].AIP Conference Proceedings,2019,2073(1):020060.
[6]徐一波.AGV小车引导方式的发展趋势分析[J].南方农机,2023,54(16):131-134.
[7]陈志刚. 基于生产工艺流程的AGV系统研究[D].北京:北京邮电大学,2018.
[8]柳忠艳,陈嘉华,张超.AGV自动物料搬运小车设计[J].科技创新与应用,2023,13(34):136-139.
[9]辛强,赵琛,李思颖,等.基于麦克纳姆轮的AGV小车设计[J].数字技术与应用,2023,41(10):169-172.
[10]罗承双.自动导引车(AGV)控制系统的研究与实现[D].赣州:江西理工大学,2018.
[11]CHEN Y Y ,CHEN J ,CHENG S N, et al.Research on AGV cart control system based on fuzzy PID control[J].Applied Mathematics and Nonlinear Sciences,2024,9(1).
[12]吕吟雪,周穆新,王超驹,等.AGV小车在物流运输行业中的应用研究[J].机电信息,2020(14):37,39.
[13]钱晓明,吴斌,武星,等.潜入牵引式自动导引车运动特性分析[J].农业机械学报,2015,46(2):294-300.
[14]张文燕.1.5 t叉车AGV改造设计[J].机电信息,2023,(11):36-38.
[15]何志坤,金晓怡,胡聪慧,等.搬运式AGV车架优化设计[J].农业装备与车辆工程,2022,60(7):143-146.
[16]尹杰,朱雪明,严正阳,等.基于麦克纳姆轮的万向式可卧升降轮椅设计研究[J].中国设备工程,2021(18):72-73.
[17]陈镇江,封潇扬.基于麦克纳姆轮的全向移动自主机器人设计研究[J].科技与创新,2022(22):150-152.
[18]李玉,张培明.无人驾驶小车导航系统研究[J].科学技术创新,2020(3):54-55.
