
电动汽车驱动系统矢量控制的应用与分析
2024-09-25 00:00:00李刚
汽车电器 2024年9期

【摘 要】纯电动汽车动力性、续航里程及其行驶的稳定性,与驱动系统的控制性能有极大的关联。文章从了解电动汽车驱动系统结构、功能及汽车对行驶的要求出发,阐述矢量控制在电动汽车驱动系统中的应用。电动汽车驱动电机基于矢量控制下的运行调控策略将有利于提高电动汽车运行的可靠性。
【关键词】电动汽车;驱动系统;永磁同步电机;矢量控制
中图分类号:U469.72 文献标识码:A 文章编号:1003-8639( 2024 )09-0050-03
Application and Analysis of Vector Control for Electric Vehicle Drive System
LI Gang
(Jilin Vocational and Technical College of Science and Technology,Changchun 133000,China)
【Abstract】The power performance,driving range and driving stability of pure electric vehicles are closely related to the control performance of the drive system. This paper expounds the application of vector control in the drive system of electric vehicles from the understanding of the structure and function of the drive system of electric vehicles and the driving requirements of vehicles. The operation control strategy of electric vehicle drive motor based on vector control will help to improve the reliability of electric vehicle operation.
【Key words】electric vehicle;drive system;permanent magnet synchronous motor;vector control
纯电动汽车电力驱动控制是电动汽车的关键技术之一,对整车的动力性、经济性及舒适性影响很大。当前电动汽车的驱动系统广泛使用交流电机,由于汽车行驶的特点,对驱动电机的控制有别于其它电机。为满足驱动电机对行驶的要求,当前电动汽车驱动控制方式主要是矢量控制和直接转矩控制,因矢量控制方法已较成熟,被众多汽车生产厂家所采用。
1 纯电动汽车驱动系统的组成与控制过程
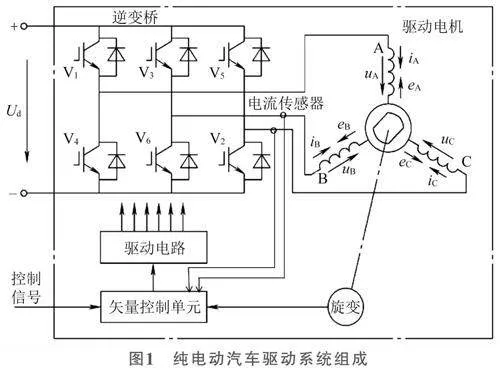
纯电动汽车驱动系统(图1)主要由动力电池、驱动电机、矢量控制器(逆变桥、驱动电路、矢量控制单元、电流传感器)、旋变传感器等组成。动力电池广泛采用锂离子电池组(磷酸铁锂、三元锂),电压通常在300~600V。驱动电机为交流感应电机或交流永磁同步电动机,额定电压与动力电池电压相近。矢量控制器是电机与电池之间电能传输的控制部件,设有功率变换电路和控制单元,具有控制电机运行及在汽车滑行、制动时将电机再生电能回馈到动力电池的功能,功率变换电路采用三相IGBT逆变桥,通过直-交变换与变频,将三相交变电流施加于电机定子绕组上使电机运行。系统工作时,矢量控制单元接收制动踏板、加速踏板、挡位等人为输入信号和旋变(电机转子位置/速度)、电机电流传感器输入的反馈信号,向逆变桥发出控制信号,有序触发各IGBT功率管进行换流,完成直-交流变换。在此基础上,改变换流速度则可改变输出频率。改变IGBT控制极脉宽(PWM)即可改变逆变桥输出电压、电流的大小,进而控制电机的转矩和转速。改变三相输出相序可控制电机转动方向,实现车辆的前行和倒车。
2 永磁同步电机运行特点与电动汽车对驱动系统的控制要求
交流永磁同步电机电能利用率比交流感应电机高2%~8%,轻载运行时节能更加显著,是现代电动汽车的优先选择。按输入电能波形及定子绕组布置形式交流永磁同步电动机可分为两种,一种是基于方波驱动的永磁同步电机,采用集中式绕组,称为无刷直流电机;一种是基于正弦波驱动的永磁同步电机,采用分布式绕组,正弦波驱动相比方波驱动方式电机转矩脉动小,在电动汽车驱动领域得到了广泛应用。
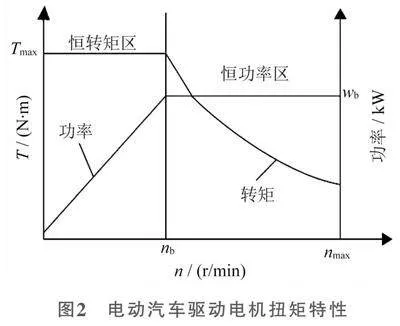
根据三相同步交流电机的运行特点,由电机公式:转速n=60×频率f/极对数p,转矩T=9550×功率P(P=×U×I×cosΦ,cosΦ为功率因数)/转速n可知:转速n与供电频率f呈正比,转矩与电压电流呈正比,只要控制电机的频率、电压、电流,就可以控制汽车的动力和行驶速度。但由于汽车运行所处的条件复杂,必须对输入量进行及时调整,保持汽车行驶速度的稳定,同时满足扭矩需求。根据电机运行特性及汽车行驶状态需求,对驱动系统的控制大致可分为两个区域——恒转矩区和恒功率区。在恒转矩区,汽车处在起步和加速状态,需克服惯性阻力,要求电机转矩储备大,同时使转矩在转速、功率的上升过程中保持恒定;在恒功率区,汽车处在高速行驶状态,此时电动机电压已达逆变器输出电压的极限值,电机转矩随转速的上升开始下降(转速进入基速点nb),如图2所示,为使汽车能运行在更高的车速上,要求电机具有足够的输入电流满足高速行驶时对转矩的需要,应使电机输出功率保持恒定。此外,当行驶阻力发生瞬时变化时,还应使电机运行保持稳定,避免失控。
3 矢量控制原理
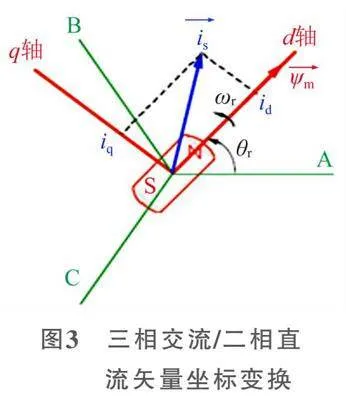
由三相交流同步电动机原理可知,当在定子绕组中通入三相电源时,定子绕组就会产生一个旋转磁场,因转子为永磁体,根据磁极异性相吸原理,定、转子磁场间就产生电磁转矩,促使转子跟旋转磁场一起同步转动,但在实际运行时,因存在阻力与负载的变化,会使转子运转稳定性变差,在常规V/F(恒压频比)控制中,变频器输出频率的变化,按照预先设定u/f曲线特性调整,V/F控制没有对电压的相位进行控制,导致在瞬态变化过程中,例如突加负载时,电机转速受冲击会变慢,但是电机供电频率还是保持不变,这样电机会产生瞬时失步,从而引起转矩和转速振荡。矢量控制又称磁场定向控制,是模仿直流电动机的控制原理,根据交流电动机的动态数学模型,利用一系列坐标变换把三相定子绕组A/B/C电流合成矢量is分解为二相旋转直流励磁分量id和转矩分量iq。励磁分量id用于为转子励磁产生磁场,转矩分量iq用于定子绕组产生转动磁场,通过对转子磁链进行定向,使定子励磁电流分量id对应于转子磁链ψm方向,定子转矩电流分量iq对应于与转子磁链ψm呈90°的方向,如图3所示。在运行中,通过跟踪转子磁链ψm位置,对定子的转矩电流分量和励磁分量分别进行控制,即可调节转矩的输出,并可快速压制因阻力变化引起的速度波动。矢量控制的具体方法是在V/F控制基础上,采用闭环控制,通过跟踪、测量转子位置、转速、定子电压、电流变化,对输入三相定子绕组的电压、电流以及频率、相位进行控制,通过给定值与实测值的比较,使转子磁场与定子旋转磁场始终保持同步(定转子间的磁通角保持90°),进而实现高精度的转矩与速度控制。
4 电动汽车驱动电机基于矢量控制下的运行调控策略
驱动电机矢量控制算法由电机控制器内的CPU通过运行程序来完成,汽车在起步、加速及低中速行驶状态时,驱动电机转速处于基速以下,在逆变器输出电压范围内,电机运行仅受电机允许通过的最大电流限制,电机可以输出最大转矩保持不变,该区域称为恒转矩区。通过FOC(转子磁场定向控制)进行调速,方法是将三相定子给定电流进行矢量分解(分为励磁分量和转矩分量),对于表贴式永磁转子电机,可使定子电流励磁分量id为0(转子为永磁材料,无需励磁),控制定子电流转矩分量iq大小(电磁转矩)就可以实现对电机转速的控制。
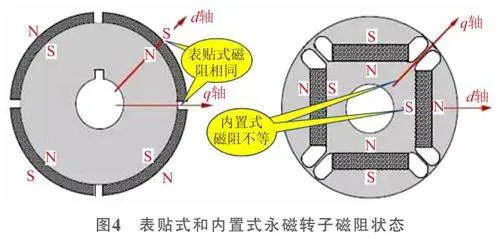
目前车用永磁同步电机均采用内置永磁式转子(相比表贴式永磁转子,其转子结构气隙呈不对称性,可产生磁阻转矩),为充分利用其磁阻转矩(图4),在基速以下采用最大转矩电流比控制(Maximum Torque Per Ampere,MTPA),即在驱动电机和矢量控制器允许工作电流范围内,对于任一给定的电流,通过调整id和iq的大小,使电动机以最小的电流输出最大的扭矩。当前MTPA控制方法多采用数据查表法,就是通过调取提前生成满足MTPA控制的dq轴电流,查询表内的数据值(利用试验测试得出的最优转矩对应的id和iq的曲线,作为MTPA控制的数据点),控制驱动电机工作。在车辆运行时,矢量控制可使定子绕组电流产生的转矩磁通Φa与永磁励磁磁通Φf在空间垂直,合成磁通Φ幅值和相位维持不变(图5),进而保持定转子间的磁通角(磁作用力)在最佳范围内,在车辆行驶阻力变化和发生瞬态过程时,矢量控制会自动调整加至电机绕组上电压、频率和相位的大小,使定转子磁通角在瞬时失衡过程中迅速恢复原态。
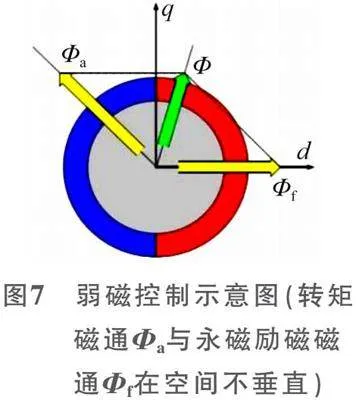
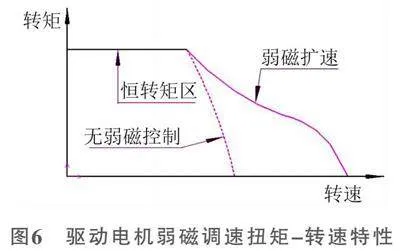
当汽车进入高速行驶状态,电机转速在基速以上,由于电机运行受到最大电流和最大电压的限制,输出功率恒定,因此该区域称为恒功率区。在该区域永磁转子转速的增加使定子绕组反电势上升,抵消部分逆变器输出端加到电机的电压,使逆变器输入电机的电流减小,电机转矩下降,汽车将无法获得高速运行所需的转矩。为使电机在基速以上更宽的可调区域高速运行,此时需要采用弱磁调速控制以提高电机的转速,即通过调节定子反向去励磁电流分量(利用定子绕组的磁场去抵消掉一部分永磁磁场,让电机的反电动势降低)来维持高速运行时的电流(图6),方法是通过控制逆变器开关元件IGBT,使三相定子电流相位提前,削弱永磁磁场,从而达到弱磁升速的目的。弱磁控制有多种方式,当前常用的是直轴电流负反馈补偿控制方法。在进入弱磁控制时,先判断进入弱磁的条件,即通过实测三相绕组电流ia、ib、ic和转子位置信息θ经矢量变换得到的反馈值us*k(us*为给定的id与iq控制的矢量电压,k是比例系数)与给定的us*值进行比较。当us*>us*k时,进入了弱磁控制,这时可以将差值作为MTPV(最大转矩/电压比)时id电流的控制,通过减小iq,加大id的负值增量(原因是在恒功率下维持电机输入电压平衡),同时使电机定子绕组电流产生的转矩磁通Φa与永磁励磁磁通Φf在空间不垂直(大于90°),合成磁通Φ幅值减小,相位增加(图7),电机的气隙磁场减弱,转速上升,使电机运行于更高的转速。
5 结论
在驱动系统控制中,矢量控制通过采集驱动电机位置、电流等信号,及时调节输出电压、电流及其相位值,通过控制电机定转子磁场的转矩角以及电机磁链,可以满足汽车在变工况条件下运行的要求。然而单靠一种控制策略是不能完美达到各项要求的,当前效率最优控制、滑模控制、变结构控制、模糊控制、神经网络、自适应控制、专家控制、遗传算法等智能控制技术已进入电动汽车驱动控制系统中,今后的电动汽车驱动控制系统的发展是优化和融合各项控制技术的过程,此过程必将显著提高电动汽车的运行品质和可靠性能。
参考文献:
[1] 胡骅,宋慧. 电动汽车(第三版)[M]. 北京:人民交通出版社,2012.
[2] 邹国棠,程明. 电动汽车的新型驱动技术(第2版)[M].北京:机械工业出版社,2015.
[3] 唐任远. 现代永磁电机理论与设计[M]. 北京:机械工业出版社,1997.
[4] 钟再敏. 车用驱动电机原理与控制基础[M]. 北京:机械工业出版社,2020.
(编辑 凌 波)
作者简介李刚(1968—),男,高级工程师,从事新能源汽车技术教学与机电教学设备研发工作,研究方向为新能源汽车技术与机电一体化控制。
