
自动驾驶叉车无法启动故障诊断与分析
2024-09-25 00:00:00卢敖卢自让
汽车电器 2024年9期








【摘 要】文章首先从叉车自动驾驶系统的组成与工作原理入手,然后对自动驾驶叉车无法启动故障的原因进行重点分析,并结合实训操作,对故障诊断的基本检测流程进行介绍,最后结合实际案例,按照检测流程对故障现象进行排除。希望对叉车维修人员的实际操作有所帮助。
【关键词】自动驾驶;叉车;电源系统;故障诊断
中图分类号:U469.7 文献标识码:B 文章编号:1003-8639( 2024 )09-0088-03
Fault Diagnosis and Analysis of Automated Forklift Cannot be Started
LU AO,LU Zirang
(Hunan Sany Polytechnic,Changsha 410000,China)
【Abstract】This paper starts with the composition and working principle of the automatic driving system of forklift truck,and then analyzes the reasons for the failure of the automatic driving forklift truck,and introduces the basic detection process of fault diagnosis combined with practical training operation. Finally,the fault phenomenon is eliminated according to the detection process combined with actual cases. Hope to help the actual operation of forklift maintenance personnel.
【Key words】automatic driving;forklift;power supply system;fault diagnosis
1 系统组成与工作原理
叉车自动驾驶的核心体系可分为感知系统、决策系统、执行系统3个层次,如图1所示。
1.1 感知系统
自动驾驶车的感知系统主要由多种传感器组成,包括激光雷达、高清摄像头、组合惯导、超声波雷达等,其工作原理主要包括环境信息的获取、预处理、特征提取和目标识别等。感知系统结构如图2所示。
1)环境信息获取。感知系统通过各类传感器获取车辆周围的环境信息,包括距离、速度、方向、图像等,这些信息是自动驾驶汽车进行决策的基础。
2)预处理。由于传感器采集到的原始数据可能受到噪声、干扰等因素的影响,因此需要进行预处理以提高数据质量。预处理包括滤波、去噪、校准等操作,以确保后续处理的准确性。
3)特征提取。在预处理的基础上,感知系统进一步提取环境信息的特征。例如通过分析图像中的边缘、纹理等特征,可以识别出行人、车辆等目标。通过分析雷达数据的回波特征,可以获取物体的距离和速度等信息。
4)目标识别。感知系统利用机器学习、深度学习等技术对提取的特征进行分析和分类,实现对目标物体的识别。通过训练大量的样本数据,感知系统可以逐渐学会识别各种不同类型的物体,并准确判断其位置、速度和运动轨迹。
1.2 决策系统
自动驾驶叉车决策系统主要为计算平台。根据收集的环境信息做出正确的决策,以确保叉车的安全、高效运行。
1)传感器与数据收集。自动驾驶叉车的决策系统首先依赖于多种传感器来收集环境数据。这些传感器包括激光雷达、摄像头、超声波传感器等,用于获取叉车周围的距离、障碍物、道路标志等信息。
2)数据处理与分析。收集到的原始数据需要经过预处理和分析,以消除噪声和干扰,提取出对决策有用的信息。这一步通常涉及数据清洗、滤波、特征提取等技术。
3)决策算法设计。决策算法是自动驾驶叉车决策系统的核心。它基于机器学习、深度学习等技术,通过训练和优化,使叉车能够在不同场景下做出合理的决策。
4)环境感知与识别。环境感知与识别是决策系统的重要环节。通过对传感器数据的解析,系统能够识别出道路、障碍物、行人等关键元素,并理解它们之间的相对位置和动态变化。
5)行为规划与选择。基于环境感知的结果,决策系统需要规划出叉车的行驶路径和动作序列。这通常涉及到路径规划、速度控制、避障等多个方面,以确保叉车的行驶安全。
6)控制执行与反馈。决策系统最终需要通过控制执行机构来驱动叉车按照规划好的路径和动作运行。同时,系统还需要接收来自执行机构的反馈,以便在必要时调整决策。
7)系统集成与优化。自动驾驶叉车决策系统需要与其他系统(如导航系统、动力系统、传感器系统等)进行集成,以实现整体的最优性能。此外,通过不断优化算法和参数,可以提高决策系统的性能和鲁棒性。
8)安全机制与保障。在自动驾驶叉车的决策系统中,安全是首要考虑的因素。因此,需要设计一系列安全机制和保障措施,如紧急制动、避障策略等,确保叉车在突发情况下的行驶安全。
1.3 执行系统
自动驾驶叉车执行系统集成了线控转向、线控制动、线控驱动等。执行系统结构如图3所示。
1)线控转向系统。线控转向系统负责执行决策系统发出的转向指令。该系统通过电子控制单元ECU接收转向指令,并通过电机和传动机构驱动转向机构,实现叉车的转向操作。线控转向系统具有响应速度快、控制精度高等特点,能够确保叉车在行驶过程中稳定、准确地执行转向动作。
2)线控制动系统。线控制动系统负责实现叉车的制动功能。该系统通过电子制动器或电动助力制动器,根据决策系统的指令对叉车进行制动控制。线控制动系统具有制动响应迅速、制动力调节精确等优点,能够在紧急制动或避障时提供可靠的制动支持。
3)线控驱动系统。线控驱动系统负责控制叉车的驱动电机,实现加速、减速和行驶等动作。该系统根据决策系统的指令,通过电子控制单元对驱动电机进行精确控制,确保叉车按照规划好的路径和速度行驶。
2 检修流程
自动驾驶叉车无法启动的故障原因主要有:蓄电池故障、电源开关故障、急停开关故障及设备供电线路与信号线束异常。以下为检修流程和故障排除方法。
2.1 故障排查流程
1)检查蓄电池电量是否正常,如图4所示。
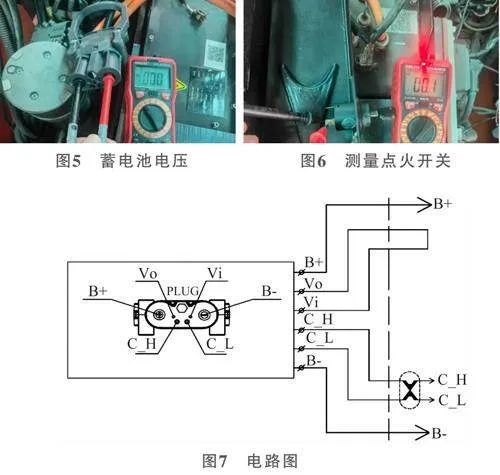
2)测量蓄电池输出电压,如图5所示。
3)测量点火开关,如图6所示。
4)检查供电线路(图7)与信号线路。
2.2 故障排除方法
1)设备电量异常。当检查车辆出现电量异常时,连接充电器进行充电。
2)蓄电池输出电压异常。按下电源开关,测量蓄电池输出电压,无电压,故障为蓄电池时应更换,故障为控制信号线束时应修复。
3)点火开关异常。接通点火开关,测量为无穷大时,更换点火开关。
4)供电线路异常。测量供电电路电压(图8),无电压则修复电路。
5)信号线路异常。测量CAN信号终端电阻(图9),电阻为无穷大时应修复线束。
3 案例分析
3.1 故障现象
故障车进行过教学使用。2024年3月在校园内进行自动驾驶叉车自动驾驶演示,当叉车自动驾驶启动时,叉车无反应,需要进行电源系统检查。经过分析后,首先进行初步检查,发现无启动现象,说明车辆本身无电源故障,故障可能在蓄电池本身与电路方面。
3.2 故障原因分析
根据之前的维修经验,叉车无法启动的原因主要有:蓄电池故障、电源电路故障、CAN信号线束故障。
3.3 故障诊断与排除
1)连接供电线束。连接充放电口,接通电源开关,测量电池输出电压,发现无电压。供电电路如图10所示。
2)检查电源控制线束。拆下充放电口,测量控制线束正负极(图11),发现正负极线束导通,正常。
3)检查CAN线束故障。测量CAN-H、CAN-L终端电阻(图12),测量值为无穷大,异常,测量CAN-H、CAN-L线束,发现CAN-H线束无穷大。
4)故障排除。通过以上检测,故障原因为充放电口CAN-H线束针脚脱落,修复CAN-H线束(图13),故障排除。
4 结论
本课题对自动驾驶叉车无法启动的问题进行了深入诊断与分析,并找到明确的故障原因,利用理论结合实际案例的方法,对故障检修相关理论和流程进行验证,希望对维修人员的维修工作有所帮助,同时建议在实际应用中,加强对设备的日常维护和保养,确保叉车的稳定运行。
参考文献:
[1] 付为伟. 电动叉车交流异步电机控制系统[D]. 十堰:湖北汽车工业学院,2023.
[2] 陶婕. 电动叉车EPS系统的传感器故障诊断与容错控制[D]. 合肥:合肥工业大学,2021.
[3] 龙合,洪悦,全喜贤. 电动叉车电气系统的维修诊断技术分析[J]. 工程机械与维修,2020(2):40-41.
[4] 陶婕,肖本贤. 电动叉车EPS系统的故障检测与诊断[J]. 电子测量与仪器学报,2019,33(10):173-180.
[5] 孙铮,肖本贤. 线控转向电动叉车控制系统多故障检测和隔离[J]. 电子测量与仪器学报,2019,33(8):108-116.
[6] 陶婕,肖本贤. 电动叉车EPS系统执行器与传感器的容错控制[J]. 电子测量与仪器学报,2019,33(8):85-93.
[7] 吉祥. 电动叉车动力锂电池管理系统设计与研究[D].长沙:湖南大学,2020.
[8] 余晓贤. 电动叉车的电动助力转向应用[J]. 中国新技术新产品,2019(7):70-71.
[9] 孙成功,肖本贤. 电动叉车稳定性控制系统传感器故障重构[J]. 电子测量与仪器学报,2019,33(1):120-127.
[10] E叉租赁. 电动叉车常见故障和维修方法[J]. 中国储运,2016(5):97.
(编辑 凌 波)
作者简介卢自让,高级技师,主要从事智能网联汽车技术相关的工作;胡浩然,副教授,高级工程师,硕士,主要从事电气工程教学方面的工作。
