
基于深度学习的头盔佩戴检测方法研究
2024-09-23 00:00:00吴卫宏高莹胡聪聪张艳敏
无线互联科技 2024年17期

摘要:文章综述了当前头盔佩戴检测技术的发展现状与挑战,重点探讨了基于深度学习方法尤其是YOLO系列算法在头盔佩戴识别领域的应用潜力。文章将YOLOv8算法应用于头盔佩戴检测领域,此方法克服了传统监控手段的局限性,实现了高效率、高准确率的自动检测,对于推动“一盔一带”安全守护行动的实施和提升公共安全管理水平具有重要价值。
关键词:深度学习;头盔检测;YOLOv8算法
中图分类号:TP311 文献标志码:A
0 引言
头盔是国民经济建设或出行不可或缺的防护用具,在涉及电动自行车的道路交通事故中,头部受伤致死的比例占交通事故死亡总数的75%及以上,而正确佩戴安全头盔可有效降低头部受伤风险达60%~70%,是保护骑乘者头部安全的关键措施。“一盔一带”安全守护行动的推行,对提升公众道路安全意识及预防交通事故伤亡具有深远意义。当前,交通管理系统人工观察未佩戴头盔的电动自行车骑行人,存在效率低下等问题,因此需要一种以图像为输入、使用算法自动判定未佩戴头盔并给出预警的计算机视觉技术和系统,以提供高效的头盔佩戴识别解决方案[1]。
目前,国内关于安全头盔佩戴检测方面的研究还不够普遍,陈扬等[2]提出HWD-YOLOv5s算法,以深度学习框架YOLOv5s为基础,改进原始模型特征提取部分的下采样方法和特征融合方法,并修改边框损失函数GIOU的计算方法。朱硕等[3]利用机器视觉传感器收集大量电动车及驾驶人目标数据,制作相应的数据集,将处理后的数据集在Pytorch框架上利用改进的YOLOv5神经网络进行训练,获得最优权重参数。汤天培等[4]提出一种基于深度学习的安全头盔佩戴行为检测方法,基于EfficientNet目标检测框架,重新设计了主干网中特征图的特征选取层,并提出像素级缩放模块,构建了一种新的用于电动自行车骑乘人员安全头盔佩戴行为检测的PLS-Det模型。
国外的研究人员对安全头盔佩戴检测问题展开了深入的研究。Felix等[5]综合比较RetinaNet与残差神经网络50层主体结合的方案,该方案以其基于锚点的机制和用于多尺度对象检测的特征金字塔网络而闻名。此外,还探究了DEtection TRansformer(DETR)架构,这是一种基于变换器架构的端到端对象检测模型,融入了ResNet50特征提取功能及YOLO架构,对骑车人及其头盔使用情况进行检测和训练,经实验,所开发的模型在检测活跃骑车人佩戴头盔方面具有良好的准确性。Li等[6]提出了一种基于深度学习的多任务框架,不仅能够检测头盔佩戴状态,还能同时识别骑行者的其他安全行为(如是否穿反光衣),为交通安全监管提供了更为全面的解决方案。
1 YOLOv8网络
YOLO(You Only Look Once)是基于深度学习的目标检测算法,其核心在于将传统的目标检测框架转为单一阶段的回归任务,通过单个的神经网络直接预测输出物体的位置、类别。该方法在神经网络中将输入图像划分为S×S个网格,各网格负责识别图像中的物体,每个单元进而预测包含物体的类别信息、边界框坐标及物体存在的置信度[7]。
YOLO算法只需单一神经网络实现检测流程的高效整合,实现了极高的处理速度,满足实时目标检测的需求,特别是在对响应时间有严格要求的场景。如在视频监控领域,特别是智能交通系统与公共安全监控中,其高速处理能力为实时事件监测与响应提供了可能。在自动驾驶技术中,该算法能够满足对环境动态物体进行即时检测与追踪的需求。而且,YOLO算法采用一阶段检测方法,简化了模型架构与训练流程,促进了算法的可实施性。在工业4.0背景下的自动化生产流水线,YOLO能有效应用于产品质量控制与分类,加速生产效率与智能化水平。综上所述,YOLO系列算法不仅革新了目标检测的实现方式,也拓宽了计算机视觉技术在实际应用中的边界。
YOLOv8模型是在YOLOv5模型的基础上提出的,针对不同计算资源需求分为YOLOv8m、YOLOv8s、YOLOv8l和YOLOv8n 4个模型。其中YOLOv8n以其优化的复杂度、保有的高检测准确性和加速的推理速度,符合交通场景中对头盔佩戴检测应用的轻量化与高精度双重要求,因此本文选用YOLOv8n作为基准模型应用于盔佩戴检测场景。
YOLOv8网络架构由Input层、Backbone、Neck和Prediction 4部分组成。其中,Backbone模块在CSP思想进行特征传递基础上,引入C2f模块替代YOLOv5模型中的C3模块,旨在增强特征表达力与优化计算效率。该算法引入SPPF(Spatial Pyramid Pooling Fast)模块以丰富特征层次,促进梯度流动。YOLOv8添加了Bi-PAN-FPN结构,它引入了双向连接和加权融合的L制,通过构造双向通道实现跨尺度连接,并将特征提取网络中的特征与自下而上路径中的相对大小特征融合,从而保留了更浅的语义信。通过添加Bi-PAN-FPN结构,YOLOv8可提高目标检测的准确,并提高训练速度。算法的Prediction部分采取Decoupled Head设计,将分类与回归任务解耦为独立的子结构,提高了模型收敛能力。
2 实验分析
2.1 实验环境
实验平台处理器为12th Gen Intel(R) Core(TM) i7-12700,32 GB运行内存,显卡型号为NVIDIA GeForce MX450,操作系统为Win10 x64。编程语言是Python3.8.0,开发环境为Anaconda。
2.2 数据集和评价指标
本文通过摄像机拍摄的方法进行数据的收集,运用LabelImg工具执行精细化手动标注过程,标注内容分为佩戴头盔、未佩戴头盔、骑行人员3个类别。为增强模型的泛化性能,本文对采集的数据通过平移、水平翻转、垂直旋转、自适应直方图均衡化4种方法随机组合的方式进行数据增强,最终生成了一个包含4382张多样化且有效的图像数据集。此数据集科学地分割为训练集、验证集和测试集,比例为8∶1∶1,旨在平衡模型的学习、调整与评估模型的有效性。
本文主要使用精度(Precision)、召回率(Recall)、平均精度均值(mAP)、mAP50和mAP50-95作为模型评估指标。精度(Precision)指标用来评估模型预测正确的正样本的比例。在目标检测中,若模型预测的边界框与真实的边界框重合,则认为预测正确。召回率(Recall)是评估模型能够找出所有真实正样本的比例。当真实的边界框与预测的边界框重合,则该样本被正确召回。mAP50表示在50%的loU阈值下的mAP值。mAP50-95指标计算的loU阈值范围在50%~95%内的mAP均值,该指标能够更准确地评估模型在不同loU阈值下的性能。Precision、Recall、mAP计算公示如下:
2.3 模型训练
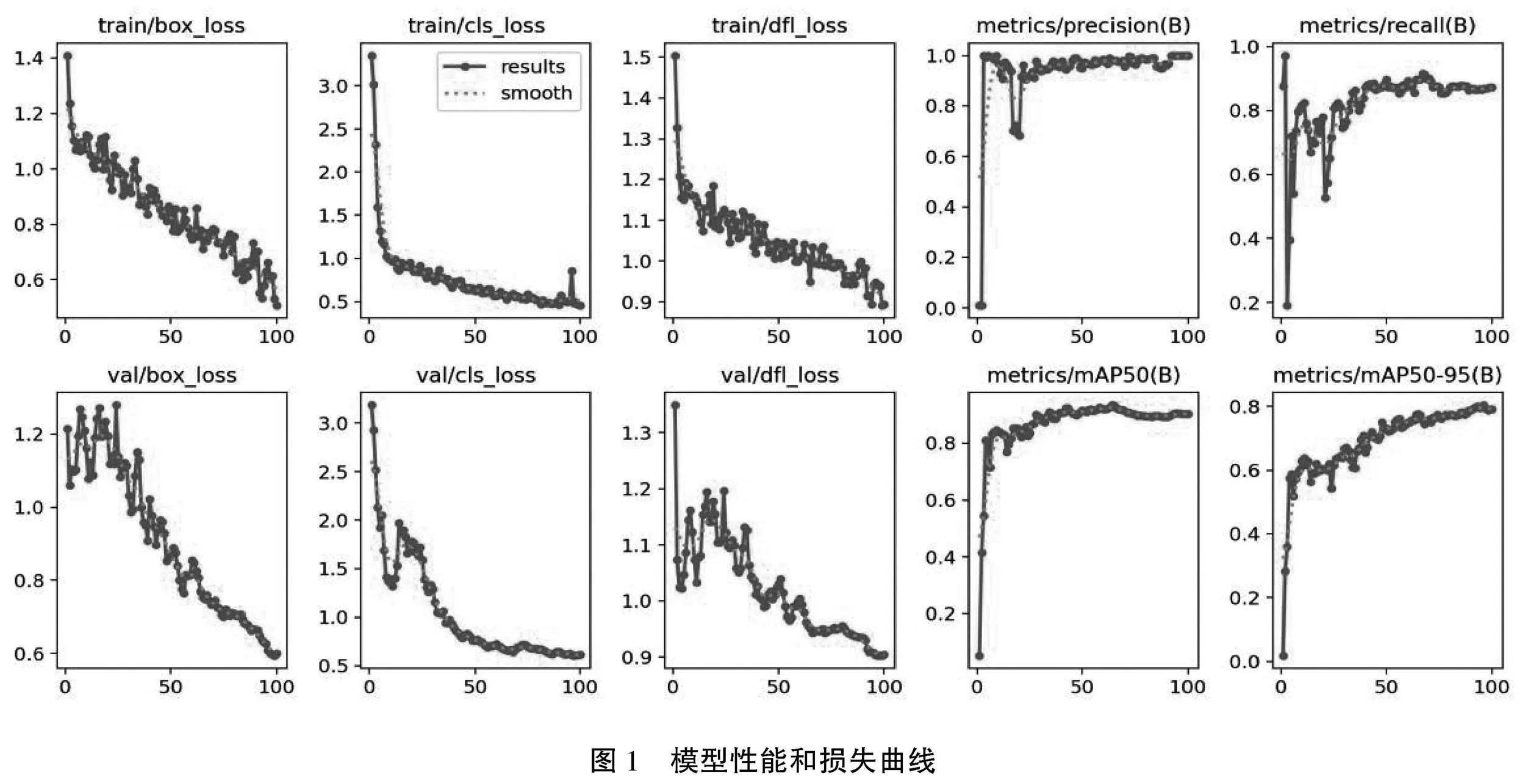
本文设置输入图像大小为640×480 pixel,批量训练样本数量(batchsize)分别为16,整个数据集训练次数(epochs)为100,初始学习率(learningrate)为0.001,采用余弦退火算法对学习率进行动态调整。训练过程中的模型性能和损失曲线如图1所示。当训练达到100轮次时,性能和损失曲线均达到平衡,此时模型已收敛,最终模型的mAP为90.3%。
2.4 对比实验与分析
为了验证YOLOv8模型对头盔检测的有效性,与YOLOv5s进行对比实验。YOLOv5算法对输入的目标图像进行预处理,以提取有用的信息。通过主干网络进行深度卷积操作,以获取图像的特征信息,多层次的预测策略可以适应不同尺寸的目标,并提高目标检测的效果。选取精度(Precision)、召回率(Recall)、mAP50、mAP50-95作为各模型的评价指标,实验结果如表1所示。
YOLOv5模型轻量且资源高效,支持多种规模以适配不同硬件需求,加之代码的易用性且结合多目标跟踪技术,可精准追踪头盔佩戴状态,尤其通过针对性微调,能高度适应各类具体应用场景,在之前研究中是较为理想的解决方案。由YOLOv8模型与YOLOv5模型的对比实验结果可见,在对骑行人员头盔数据集进行训练时,YOLOv8模型的mAP@0.5比YOLOv5s模型更高,性能提升4.6%。mAP@0.5∶0.9表示在不同IoU阈值上的平均mAP,从0.5到0.95,步长0.05。该评价指标能更准确地评估模型在不同loU阈值下的性能,通过对比实验结果可以看出,YOLOv8提升了5.7%,说明该模型在目标检测中,检测精度更高,同时在多种难度条件下也具备更高的稳定性和可靠性。
3 结语
本文提出了一种基于YOLOv8算法的头盔佩戴检测模型。针对实时性和高精度要求较高的头盔佩戴检测场景,存在算法参数量大、复杂度高和实时性差等问题。YOLOv8n以其优化的网络结构和轻量化设计,通过改进的CSP和C2f模块加强特征提取,结合FPN+PAN结构实现多尺度特征融合,并采用解耦头设计提升模型收敛,以及AnchorFree机制优化样本分配,全面增强了检测能力。实验结果显示,与YOLOv5s相比,YOLOv8在头盔检测任务上不仅提升了mAP达4.6%,还在宽范围IoU阈值下稳定性提高了5.7%,验证了其在提高检测精度和泛化能力方面的显著效果。综上,YOLOv8模型以其高效的检测速度、简化的结构设计及增强的检测精度,可实时精准识别驾驶者头盔佩戴情况,强化了智慧交通的监管效能。
参考文献
[1]谢昊,贾小军,喻擎苍,等.基于改进YOLOv5的骑行人员头盔及车牌检测[J].光电子·激光,2024(4):396-404.
[2]陈扬,吕艳辉.基于改进YOLOv5s的头盔佩戴检测算法[J].沈阳理工大学学报,2023(5):11-17.
[3]朱硕,黄剑翔,汪宗洋,等.基于深度学习的非机动车头盔佩戴检测方法研究[J].电子测量技术,2022(22):120-127.
[4]汤天培,龚昊,李洪亮,等.电动自行车骑乘人员安全头盔佩戴行为检测[J].南通大学学报(自然科学版),2023(2):12-19.
[5]FELIX W S,CHRISTOFFER R.Automated detection of bicycle helmets using deep learning[J].Journal of Cycling and Micromobility Research,2024(2):1-10.
[6]LI M,WANG D.Multi-task deep learning for rider safety behavior analysis including helmet usage[J].Pattern Recognition Letters,2023(159):91-99.
[7]谢嘉飞.目标检测算法优化及在头盔检测系统中关键技术研究[D].太原:太原师范学院,2024.
Research on helmet-wearing detection methods based on deep learning
Abstract: This paper provides an overview of the current state and challenges in helmet-wearing detection technology, with a particular focus on the application potential of deep learning methodologies, notably the YOLO (You Only Look Once) series of algorithms, in the realm of helmet recognition. By implementing the YOLOv8 algorithm for helmet-wearing detection, this approach not only overcomes the limitations of conventional surveillance methods but also achieves highly efficient and accurate automated detection. It thereby significantly contributes to the implementation of the “One Helmet, One Belt” safety campaign and enhances public safety management capabilities.
Key words: deep learning; helmet detection; YOLOv8 algorithm
