
基于粒子群优化算法的太阳能水培智能控制系统设计与实现
2024-09-22 00:00:00张净涂笑童刘晓梅
软件工程 2024年9期


关键词:粒子群优化算法;最大功率点跟踪;水培智能控制;模糊控制;Smith预估器;光伏发电
中图分类号:TP273 文献标志码:A
0 引言(Introduction)
目前,水培营养液水质参数调控的发展仍然滞后,营养补给存在较大时延[1],并且设备运转会产生额外的碳排量。因此,研制兼具精准控制技术和节能环保特性的水培智能控制系统,具有重大的科研意义。
模糊控制算法常被运用于农作物的生产监控中[2],但其参数选取随机性较大,控制反馈有时延,容易超调。对此,赵羊羊等[3]用PSO算法优化模糊控制器的量化、比例因子,提升了系统的抗干扰能力;SAKTHIVEL等[4]利用Smith预估器有效补偿了模糊控制器的输入时变延迟。光伏电池的转换效率受环境变化影响而呈现不稳定性[5]。为实现效率最大化,周涛等[6]设计了MPPT控制的自供电光伏电源系统,提高了能量收集效率;王津[7]提出一种基于扰动观测法的MPPT方法,有效减少在外部环境变化时的功率波动。
综上,本研究选择PSO算法对模糊控制参数寻优,引入Smith预估器,实现对营养液pH 和EC值的精确、高效控制,从而稳定维持作物适宜的生长环境;同时,加入光伏发电模块,并通过MPPT算法提升发电效率,大幅减少了碳排量。
1 系统结构及工作原理(System structure andworking principle)
1.1 系统总体结构
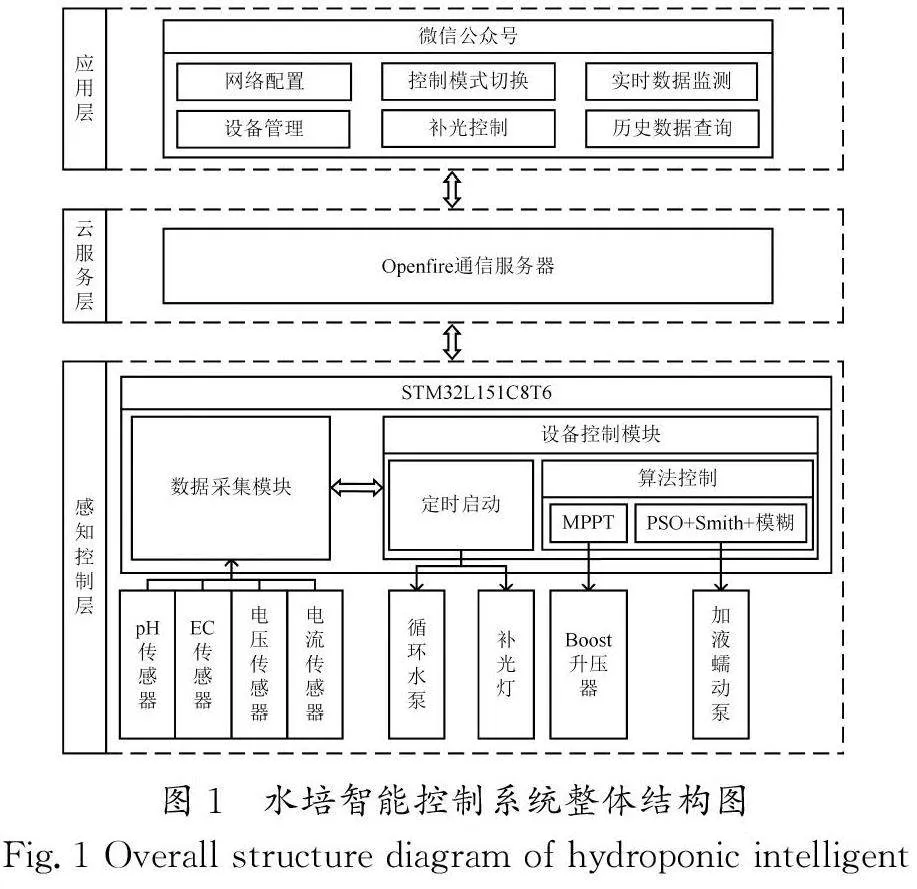
完整的水培智能控制系统采用三层架构,自上而下有应用层、云服务层和感知控制层。感知控制层主要由数据采集模块和设备控制模块组成,两个模块集成于STM32L151C8T6芯片中,构成一个完整的控制核心。其中,由pH传感器和EC传感器构成的数据采集模块负责获取营养液的水质参数,并将数据上传至设备控制模块进行控制决策;设备控制模块通过定时程序和算法程序分别对循环水泵、补光灯、MPPT控制器和加液蠕动泵下达相应指令以调控作物的生长环境。云服务层选用Openfire通信服务器作为数据双向传输的桥梁,把感知控制层获取到的营养液水质参数传输到应用层,供用户查看和分析,同时把用户触发的控制指令下发至感知控制层,指挥系统完成相应操作。应用层是基于微信公众号平台搭建的一个用户端,可以进行网络配置、设备管理、控制模式切换、补光控制、实时数据监测和历史数据查询等操作。水培智能控制系统整体结构图如图1所示。
1.2 营养液水质参数控制设计
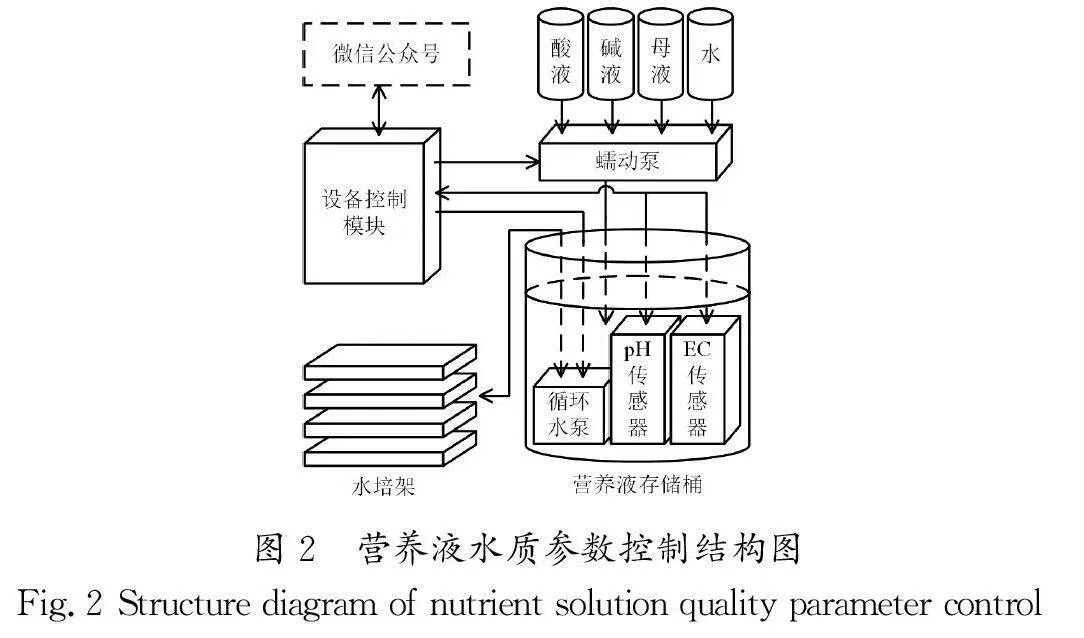
用户先通过微信公众号向系统下达自动控制指令,设备控制模块接收指令后,通过营养液存储桶中的pH 传感器和EC传感器获取实时数据,再通过PSO算法和Smith预估器优化的模糊控制器输出控制决策,进而驱动蠕动泵分别适量抽取4种溶液进行补充。在实验过程中,营养液的pH通过注入酸液和碱液进行调节,EC值通过注入肥料母液和水进行调节。由于改进后的模糊控制器具有独特的反馈机制,因此系统会持续获取pH 和EC的实测值并与预设的最适值进行相互比较,根据比较结果不断重复上述蠕动泵的加液流程,直至参数稳定在最适值。在自动控制状态下,循环水泵会定时开启,向水培架中补充营养液,同时也将被消耗的残液输送回存储桶中重新加液更新,营养液水质参数控制结构图如图2所示。
1.3 光伏发电控制设计
根据种植现场需求,将若干个电池分别串联和并联组成光伏电池组。在光伏电池组和负载之间引入MPPT控制器,用于控制光伏电池端的电压,使变换后的工作点正好与光伏电池的最大功率点重合[8]。完成光能向直流电的转化后,电能存储于蓄电池内备用。逆变器则将蓄电池组中的存电转化为稳定的交流电供给系统的负载使用,以保证系统正常运转。完整的光伏发电控制结构如图3所示。
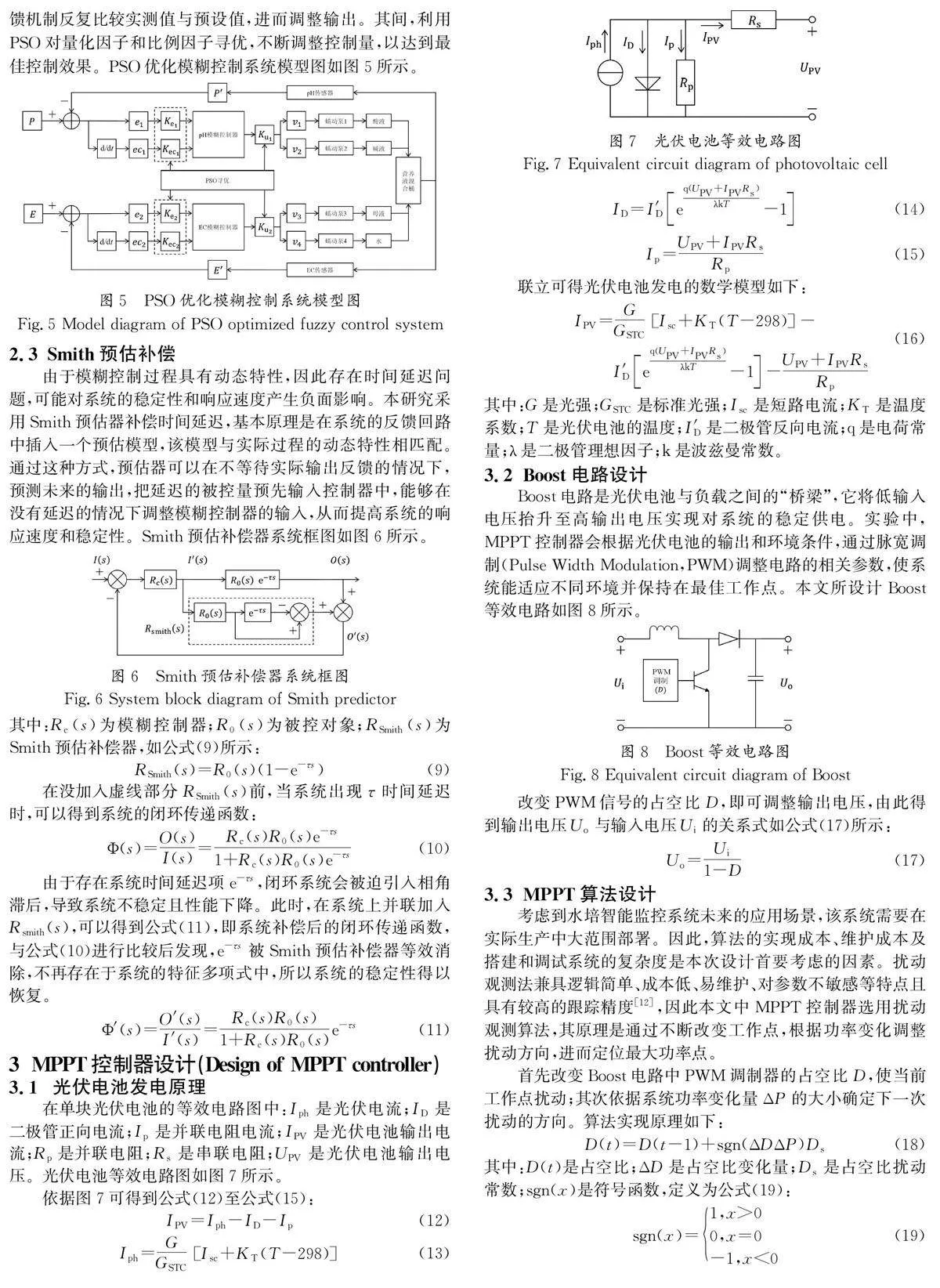
2 模糊控制器的设计与优化(Design andoptimization of fuzzy controller)
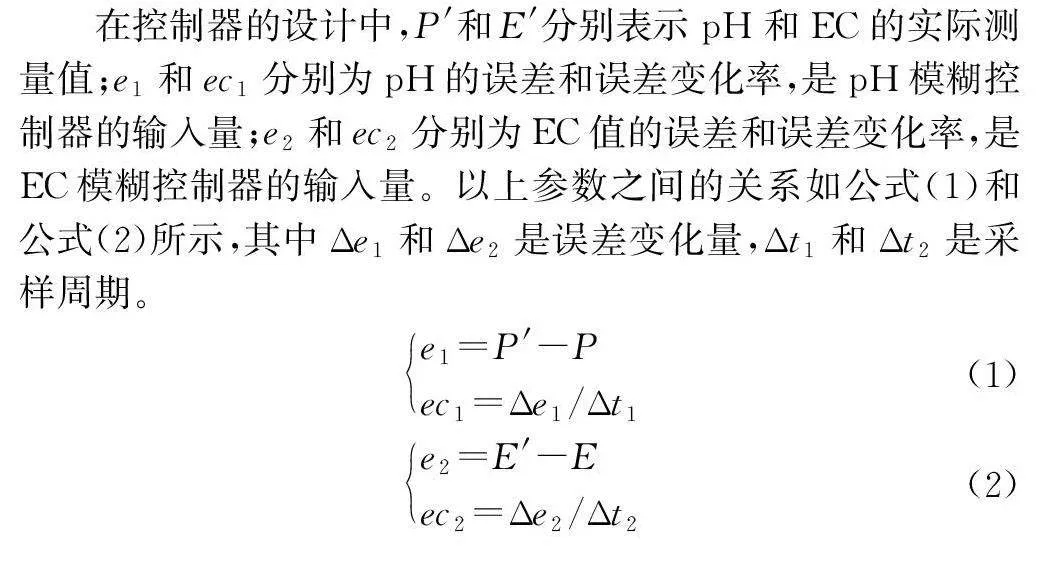
2.1 模糊控制器设计针
对调控pH和EC值的需求,分别设计了两个模糊控制器,每个控制器负责合理分配两个蠕动泵的加液速率,以精确调节对应的营养液水质参数。记最适宜水培作物生长的pH和EC值分别为P 和E,这两个变量的取值因作物品种而有所差异,本实验选择生菜作为研究对象,分别取P 为6.5,E 为2.000 mS/cm[9]。
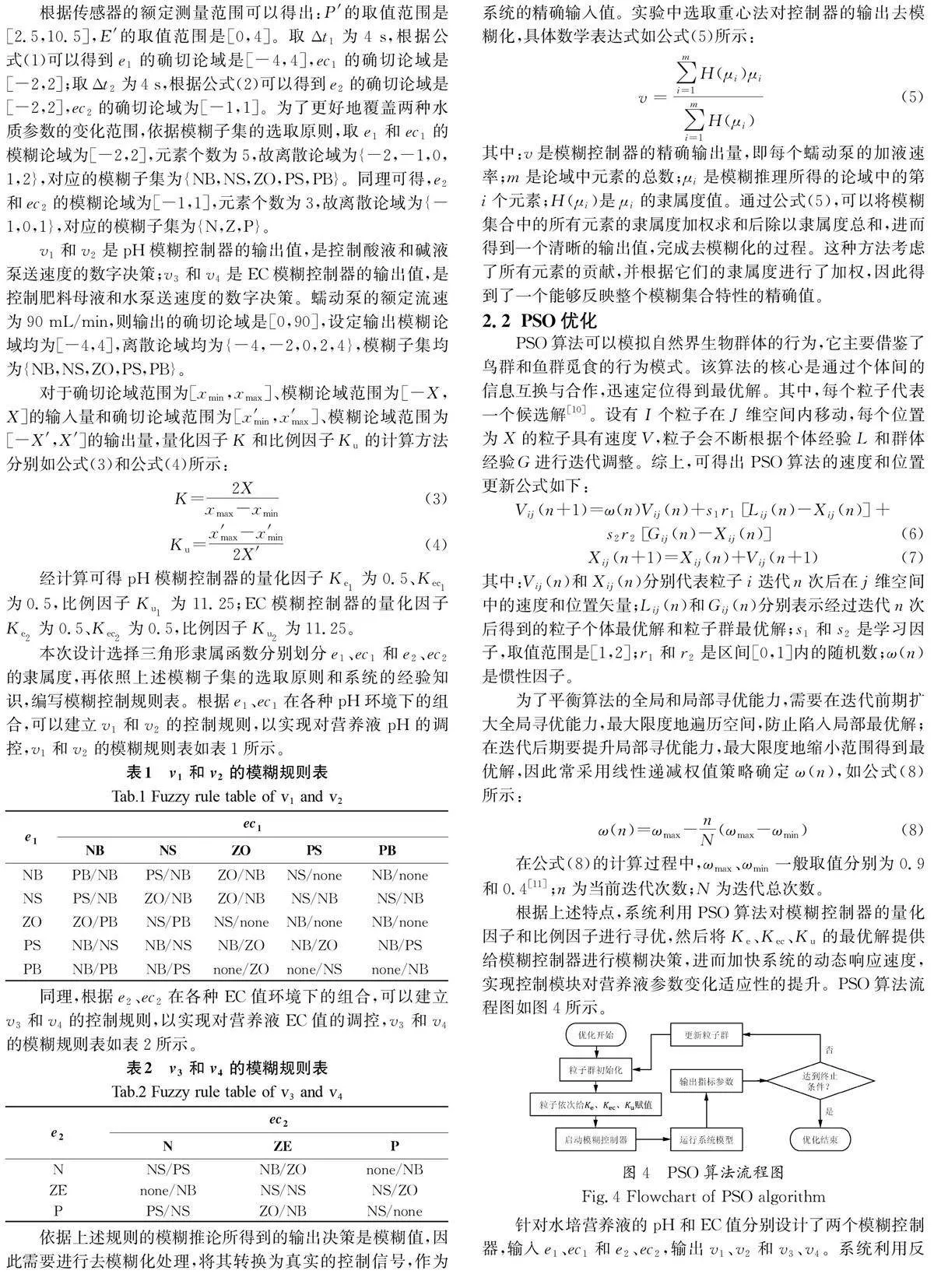
在初始化工作点时,电压和电流的采样值选择开路电压的一半或者短路电流的一半。算法通过不断更新D (t),确保扰动方向始终与输出功率增大的方向一致,当|ΔP|小于设定阈值α 时停止扰动,将系统的工作点稳定在最大功率点附近。扰动观测算法流程图如图9所示。
依据上述算法原理设计出的控制仿真模型主要由核心Boost升压电路、光伏电池、MPPT控制器和PWM 模块组成,MPPT算法模型图如图10所示。
4 系统性能测试(Performance testing of system)
4.1 系统实物开发
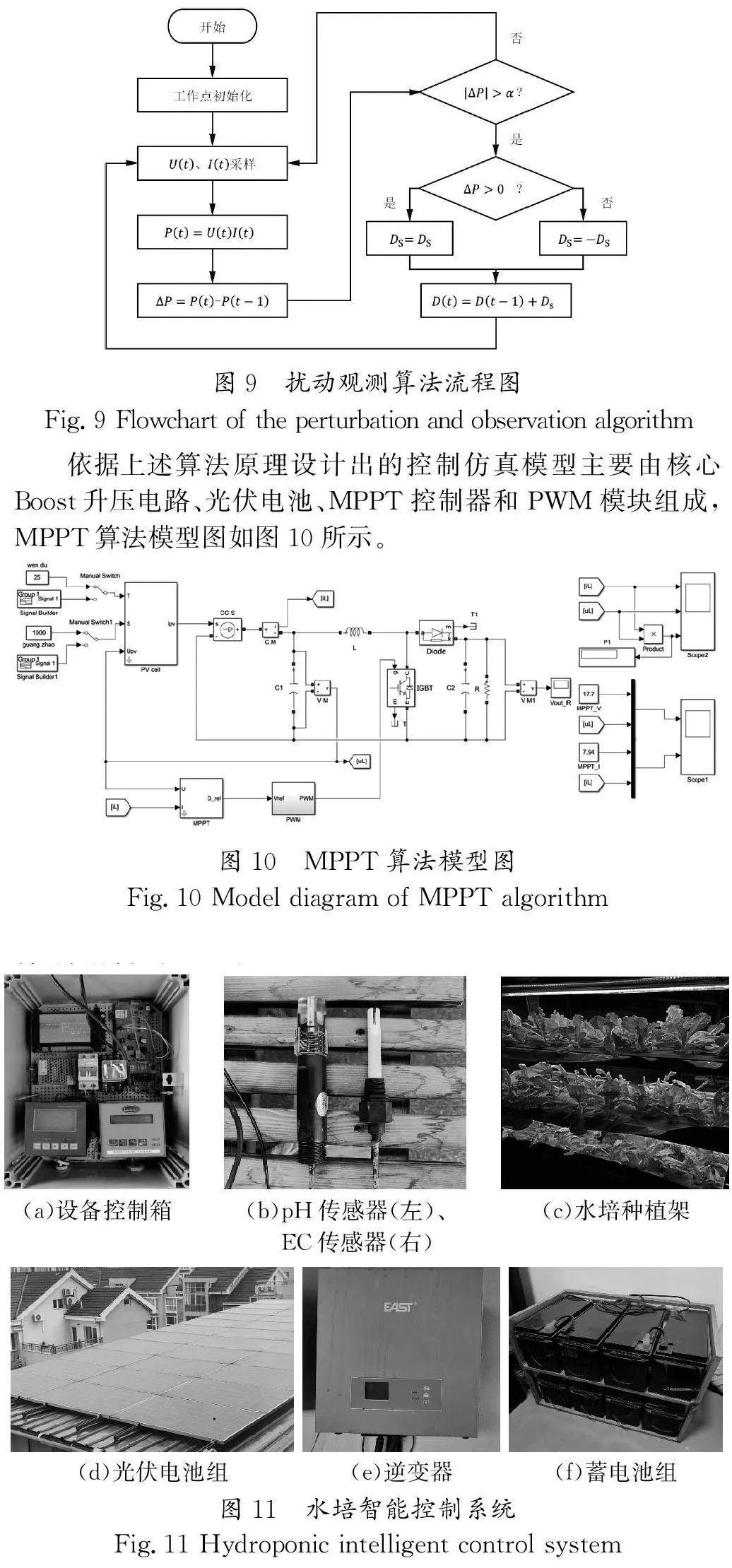
本研究设计的水培智能控制系统是江苏省镇江市重点研发计划项目,实验系统的设计、开发与测试工作均在江苏科茂信息技术有限公司的农产品实验基地完成,其研究成果于2023年11月9日成功通过专家组项目验收,目前已结项并将研制出的系统进行了实际的部署,并获得了显著的产收效果。以下是基于粒子群优化算法的太阳能水培智能控制系统的实物研发成果(图11)。
4.2 营养液水质参数调控有效性测试
4.2.1PSO Smith优化的模糊控制算法效果测试
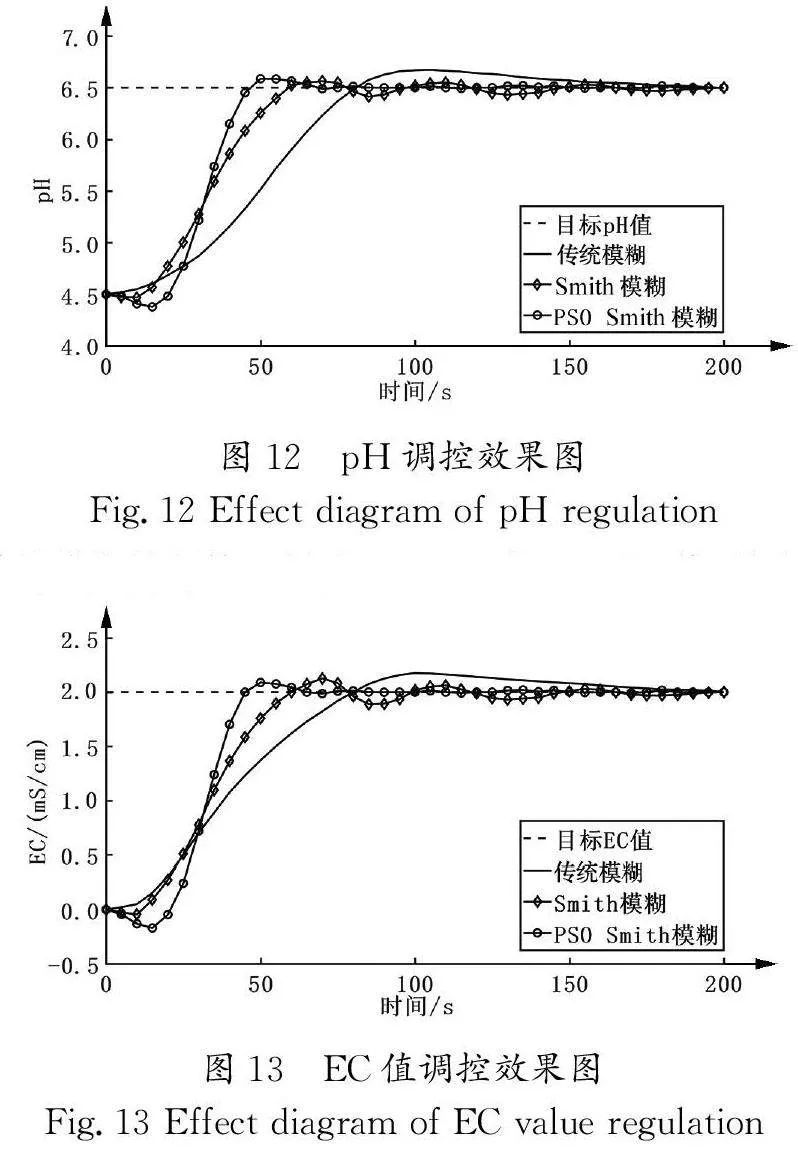
实验比较了3种模糊控制算法,分别为传统模糊控制、Smith模糊控制和PSO Smith模糊控制。实验主要验证的是本研究设计的算法模型对比两种传统算法,是否能够更灵敏、准确地调节营养液水质参数,使目标参数以更快的速度回归作物生长所需的最适值,并维持在一个相对稳定的范围。实验将最适pH和EC值分别设置为6.5和2.000 mS/cm,再把pH 和EC值的初始值分别调整为4.5和0 mS/cm。
仿真实验结果如下。
传统模糊控制算法耗费81 s达到pH 预设值,并在183 s 后维持稳定,维稳后的波动范围在6.497~6.668,波动幅值为0.171;Smith模糊控制算法耗费59 s达到pH 预设值,并在102 s后维持稳定,维稳后的波动范围在6.412~6.561,波动幅值为0.149;PSO Smith模糊控制算法耗费44 s达到pH预设值,并在63 s后维持稳定,维稳后的波动范围在6.489~6.586,波动幅值为0.097。pH调控效果图如图12所示。
传统模糊控制算法耗费80 s达到EC预设值,并在181 s 后维持稳定,维稳后的波动范围在2.001~2.176 mS/cm,波动幅值为0.175 mS/cm;Smith模糊控制算法耗费57 s达到EC 预设值,并在100 s后维持稳定,维稳后的波动范围在1.974~2.127 mS/cm,波动幅值为0.153 mS/cm;PSO Smith模糊控制算法耗费43 s达到EC预设值,并在62 s后维持稳定,维稳后的波动范围在1.987~2.089 mS/cm,波动幅值为0.102 mS/cm。EC值调控效果图如图13所示。
4.2.2 水培种植测试
将实验的观测时间定为45 d,将生菜幼苗均匀地种植在水培架上,开启设备控制箱中的PSO Smith模糊控制线程使系统进入自动控制模式。营养液水质参数每日的记录方法为早、中、晚进行3次水质采样,每次采样重复获取6次数据,计算18次采样数据的平均值,记录为当日的观测值。为了减少其中沉积物等杂质对营养液水质参数的影响,每隔15 d更新一次营养液。通过上述测量方法,得到pH 和EC值在实验期间的变化趋势分别如图14(a)和图14(b)所示。
4.3 MPPT控制算法效果测试
在系统设计中选择的光伏电池的基本参数如下:开路电压Uoc 为22.00 V;短路电流Isc 为8.58 A;最大功率点电压Um为17.70 V;最大功率点电流Im 为7.94 A;最大功率Pm 为140.00 W。设置的实验环境条件为室温25 ℃和光照强度1 000 W/m2。基于以上参数,可以得到电流、电压和功率的跟踪效果如图15所示。
5 结论(Conclusion)
本文设计的基于粒子群优化算法的太阳能水培智能控制系统覆盖了应用层、云服务层和感知控制层,依靠嵌入式等相关技术完成了实物搭建。实验数据的对比结果显示,引入PSO算法和Smith预估器的模糊控制器具有更短的调节时间和更小的波动幅度,解决了时滞问题,提升了控制效率。种植测试中,pH和EC值始终维持在最适范围内轻微浮动,证明了系统的可靠性。MPPT扰动观测算法电流、电压和功率跟踪效果图表明,经过短暂的调节,光伏设备工作点能与最大功率点相匹配,提升了发电效率。
综上所述,本系统既达到了大幅提升农作物生产效率的目的,又符合低碳农业的环保理念,具有深远的研究意义和广阔的应用前景。
作者简介:
张净(1975-),女,博士,副教授。研究领域:计算机应用,电子与通信工程。
涂笑童(1999-),男,硕士生。研究领域:电子与通信工程。
刘晓梅(1976-),女,本科,高级工程师。研究领域:企业信息化,农业信息化。
