
文献计量可视化分析“水下机器人”领域现状、热点与趋势
2024-09-14 00:00:00叶丽杰成尔卓徐灵瑞
物联网技术 2024年3期







摘 要:基于CNKI数据库使用CiteSpace对2000—2021年水下机器人领域的文献进行研究,分析探讨国内水下机器人研究的现状、热点与趋势。发现:我国的水下机器人领域发文量逐年提高,该领域受到了广大学者的关注,研究热度不断增加;高被引文献基本为综述类文章,发文作者主要为万磊、李一平等学者,研究机构主要为中科院和哈尔滨工程大学;热点研究关键词为“神经网络”“运动控制”等,热点研究聚类主要为内部软件研究和仿真技术研究;滑膜控制、计算流体力学、路径规划很可能是未来的研究趋势。本文对水下机器人领域进行可视化系统性分析,展示了其在发文、关键词、热点和趋势方面的情况,为水下机器人方向研究学者提供了新的理论研究依据和视角,也为水下机器人的发展提供了一定借鉴和参考。
关键词:水下机器人;文献计量;CiteSpace;可视化;CNKI数据库;知识图谱
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2024)03-00-05
0 引 言
近几年来,我国逐渐加大对海洋资源的开发力度,对海洋资源开发工程给予大量投资。我国从20世纪90年代初开始水下机器人的研究,90年代中期成功研制出我国第一台千米级“探索者”水下机器人。胡锦涛主席在党的十八大报告中提出“建设海洋强国”的任务,并将我国的海洋发展战略提升至国家战略高度[1]。“十二五”期间,沈阳自动化研究所成功构建了“潜龙”系列和“探索”系列深海水下机器人两个技术体系[2-3],其中“蛟龙号”创造我国最深的潜海记录,这些水下机器人为我国海洋事业的发展做出了巨大的贡献,我国成为具有深海探测能力的国家之一[4]。
因此,水下机器人领域的研究显得尤为重要,查阅研究水下机器人领域的研究文献,多为主观定性的综述形式,缺乏以客观为主的定量分析。本研究使用科学知识图谱(Mapping Knowledge Domains)方法,运用CiteSpace进行水下机器人领域研究的分析,将水下机器人领域的研究以可视化的方式呈现出来,并进一步研究探索其热点主题和演化路径,为后期相关研究发展提供可借鉴的参考。
1 研究方法和数据来源
1.1 研究方法
CiteSpace是陈超美团队基于Java语言开发的引文可视化分析软件[5],它能帮助我们挖掘到热门主题、关键性文献,分析出具体某一特定领域的发展历程。本文通过文献计量分析法进行分析,运用CiteSpace(5.8.R1)对水下机器人这一领域的文献进行统计分析及可视化。在CiteSpace中可以进行关键词聚类分析、研究作者图谱可视化、研究单位图谱可视化等多种可视化分析,非常有利于分析已有的水下机器人研究热点、研究趋势和发展路径。
1.2 数据来源及处理
数据收集于CNKI学术期刊数据库,选择主题检索输入“水下机器人”进行检索(检索日期:2021年9月30日),选择期刊来源为SCI来源期刊、 EI来源期刊、北大核心、CSSCI和CSCD后共得到1 154篇文献。经过人工数据清洗将无署名、新闻报道类、相关性极低文献剔除后剩余658篇文献。在CiteSpace处理时为保障结果准确性,本文将中英文、全称缩写、意义较接近的关键词进行了合并处理。
2 水下机器人研究的基本情况
2.1 水下机器人研究文献的时间分布
研究文献的时间分布可以分析水下机器人相关文献随时间变化的关系,有助于凸显水下机器人领域科学发展的某些特点和规律。从CNKI中检索到水下机器人的文献发表年份与数量分布如图1所示。2000—2005年水下机器人发文量处于缓慢起步时期,文献数量虽有所增长但增长幅度很小、增长速度缓慢。这一阶段国内相关文献主要为探索智能机器人的能力范围、水下作业的可能性等将假设转为现实的前期理论准备阶段,为后续水下机器人的深化研究奠定了坚实基础。水下机器人研究文献数量的大跨度出现于2004—2007年,这期间发文量大幅度提升,显示水下机器人的关注度显著提高。相关文献内容从基础理论探究转到实际操作,开始对智能机器人如何实现下水、如何进行可控的水下移动作业以及数据的采集方式、传输方式的可实现性等设想进行完善,把智能水下机器人落地操作变为现实并逐渐将智能水下机器人带入大众视野。从2007年至今,水下机器人相关文献的发文量呈现震荡上升趋势,研究内容更加深化。在解决了智能机器人下水、控制移动等基本操作后,研究学者开始向水下机器人功能强化、细节完善等应用型领域拓展。这昭示着国内智能机器人领域对“水下机器人”抱有相对强烈的研究兴趣和发展欲望,由此可见智能水下机器人的发展前景十分可观。
2.2 水下机器人载文期刊分析
期刊是发表学术论文的主要渠道之一,一般情况下载文期刊的知名度和权威性越高则说明其所载文献的可信度、严密度和权威度就越高。“水下机器人”相关载文期刊分布见表1所列。就载文数量而言,处于第一梯队的期刊为《中国造船》《机械工程学报》《兵工学报》,三者总载文量达到64篇,占表1中期刊总量的三分之二。虽然这三种期刊载文量相对可观,但复合影响因子均不高。尤其是《中国造船》,该期刊的发文量占据榜首但复合影响因子却在表1中居于榜尾。值得一提的是《计算机研究与发展》《农业工程学报》和《科学学与科学技术管理》这三份期刊,它们的总载文量较少,但载文的复合影响因子平均值达到3.486,属于水下机器人领域的高质量参考期刊。此外,它们的核心收录数据也十分可观,基本收录于核心期刊、EI、CSCD中。综合表1数据内容,《机械工程学报》的发文量以及核心收录情况都处于较高水平且复合影响因子相对较高,为研究水下机器人的主要阵地。
2.3 水下机器人高被引文献分析
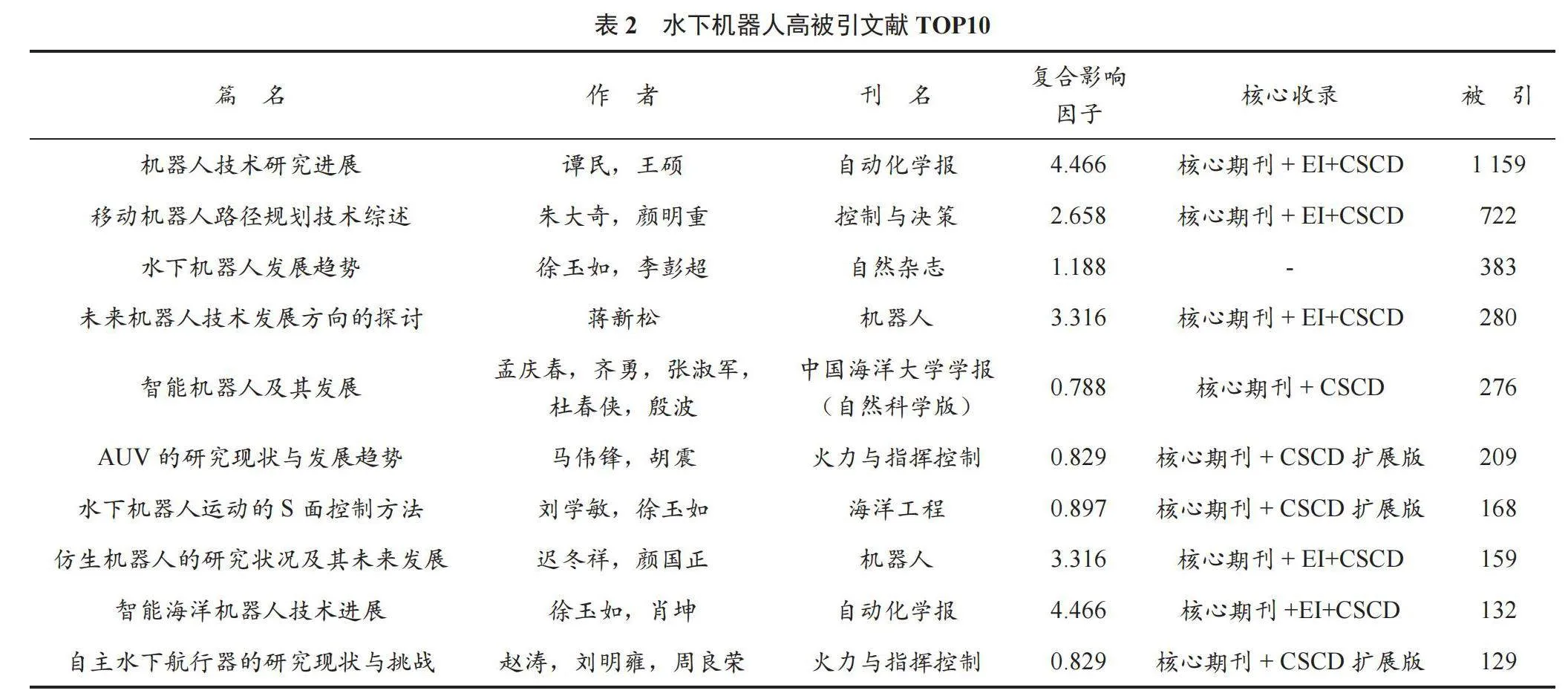
文献被引频次体现了文章的受认可程度[6],也是文章质量的重要参考指标之一。因此,研究分析高引用率文献能提炼出具有广泛认可度和影响力的文献。水下机器人相关高被引文献数据见表2所列。被引量方面,《机器人技术研究进展》和《移动机器人路径规划综述》两篇文献的被引用次数呈现出绝对优势,《机器人技术研究进展》将“水下机器人”带入大众视野,并对机器人水下作业领域的应用价值、国内外发展情况以及未来展望做出综合性叙述,这无疑为水下机器人后续发展夯实了基础。研究主题方面,高被引文献基本为综述类文章,反映了学者对该领域的研究进展、理论和方法了解的需求迫切。期刊方面,高被引文献中有9篇核心期刊,复合影响因子普遍较高,可知关于水下机器人现状研究的相关文献水平都较为突出,具有一定的深度和见解。
2.4 水下机器人发文作者分析
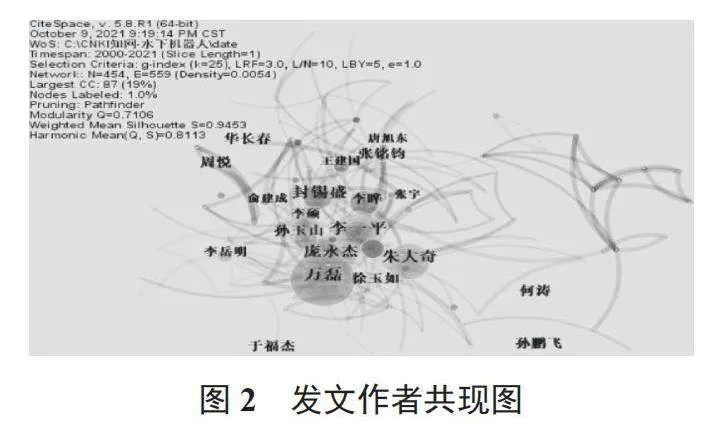
通过对高产作者和核心机构的分析可以得出该领域各学术生产力的合作关系和研究力量,将节点类型选择为“作者(Author)”,得到由454个节点、559条连线组成、密度为0.005 4
的水下机器人研究的发文作者共现图谱(如图2所示)。发文作者共现图反映了国内水下机器人研究的主要作者及其合作关系。从生成的图谱中可以发现,合作网络呈现出分散化小范围的合作特征,主要是以万磊、庞永杰、朱大奇作为核心的合作网络。某一研究领域的发展是知识不断创新和积累的结果,而作者则是一个研究领域的核心所在[7],具有导向作用。根据普赖斯定律[8],指定研究领域的核心作者发文量应满足式(1)。其中mmax为发文量最多作者的论文数。
(1)
代入数据计算后可知,水下机器人领域的核心作者的发文量应为5.243,故发文量大于等于6的为水下机器人领域的核心作者,满足条件的作者为38位。就高产作者而言,发文量最多的5位学者分别是万磊(49篇)、李一平(41)、庞永杰(35)、封锡盛(32)、朱大奇(31),共188篇,占总发文的28.57%,共同为水下机器人领域研究做出了突出贡献。
2.5 水下机器人发文机构分析
通过发文机构分布可以了解该领域相关研究的科研力量分布,为深入进行科研考察与合作提供参考借鉴。借助CiteSpace进行机构共现得到图3,从连线紧密程度可知各机构间合作较为密切,同时不难发现国家重点实验室在水下机器人研究领域扮演着重要的角色。对各机构发文数据导出后发现发文机构主要为中国科学院沈阳自动化研究所机器人学国家重点实验室(78篇)、哈尔滨工程大学船舶工程学院(47篇)、中国科学院沈阳自动化研究所(36篇),详见表3所列。通过分析机构发文情况可知,中国科学院和哈尔滨工程大学是研究水下机器人领域的前沿阵地和中坚力量。
2.6 研究热点与趋势分析
2.6.1 关键词共现网络分析
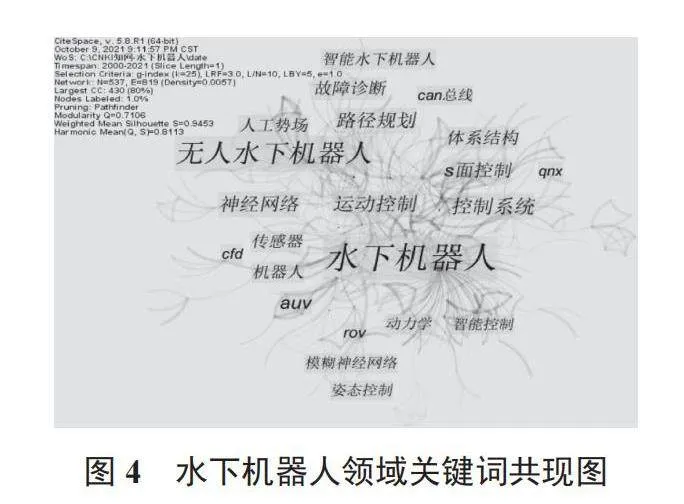
关键词是一篇文章核心观点的表达,是对文章主题的概括[9],对文章关键词进行分析可以对水下机器人领域研究形成基本了解。在同一篇论文中出现的关键词存在关联,一般认为,多个关键词在同一篇文献中出现的次数越多则说明它们之间关系越密切[10]。对关键词进行共现网络分析可以帮助我们有效地挖掘水下机器人领域的研究热点。
由图4可见,除“水下机器人”本身以外,高频关键词有“神经网络”“运动控制”“控制系统”“S面控制”等。从图中不难发现,“控制”对于水下机器人领域研究的重要性,随之衍生出了“路径规划”“体系结构”以及传感器的处理使用等关键词。
2.6.2 关键词聚类分析
为了进一步考察水下机器人领域相关研究热点的知识结构,使用潜在语义索引(LSI)算法对关键词进行聚类得到关键词聚类图谱[11],如图5所示。模块值(Modularity Q=0.715 4)大于0.3,平均轮廓值(Mean Silhouette=0.904 4)大于0.7,表明聚类网络具有结构显著的特点,且聚类结果具有高可信度。关键词聚类结果主要为“水下机器人”“自主水下机器人”“体系结构”“控制系统”“auv”“仿真分析”“机器人”“路径规划”“petri网”“便携式auv”等。研究方向基本分为两个方面:一方面为机器人内部软件的研究,相关聚类包括速度障碍法、控制系统和机械手系统;另一方面为仿真技术的研究,相关聚类包括实时数字仿真和仿真分析。
2.6.3 关键词突现分析
突现词探测的基本原理是某个关键词的词频在短时间内激增,突然变成研究热点。由于突现词的突现状态通常具有时间延续性,因此可以用于辅助预判未来一段时间内的研究热点和研究趋势[12]。
根据水下机器人研究突现词探测图(图6)可以将突显词分为三个阶段,即2000—2004年、2005—2018年、2019年至今,其中从2019年至今该研究领域逐渐成为热点趋势。
2000—2004年,相关研究侧重于对水下机器人应用场景以及其作业能力的研究,进一步延伸至对干扰观测、控制技术、嵌入式图像处理、水动力系数的研究。这一阶段研究侧重基础,逐渐构建起水下机器人的研究框架,为后续的创新深化研究奠定了大量的技术基础。2005—2018年,尤其是2007年,出现了许多相关领域的突现词,持续时间都在4~5年。这几年大量研究者关注于传感器,以及诊断范围包括传感器在内的机器人自身故障检测,在水下机器人进行日常相关运维工作时,会进行适时保养和排除故障,确保水下机器人正常工作。智能水下机器人的工作环境普遍恶劣,保证技术可靠显得尤为关键,为此研究者提高了对自主故障诊断和容错控制的重视。2018年至今,突现词开始减少,研究进一步细化和攻克技术难点。
由于突现词具有时间延续性的特点,滑膜控制、计算流体力学、路径规划很可能是未来的研究趋势。近几年,控制系统进一步向滑膜控制方向细化,滑模结构方法因其所具有的优良特性而受到越来越多的重视。通过自行设计所需的滑模面和等效控制律,能快速响应输入的变换,因此将此控制系统运用到水下机器人上,可以克服系统的不确定性,进一步增强水下机器人在海洋环境中的适应能力,提高完成任务的效率与可靠性。流体力学是水下机器人领域的基础学科,因此从初期到现在一直进行着相关研究。从2018年至今,流体力学无论是从自身技术研究还是工程应用方面均进入快速发展时期。水下机器人路径决策方法是水下网络的重要组成部分[13],合理的路径规划是水下机器人执行海洋观测与探测任务的重要保障[14],其可能是未来水下机器人研究的重要趋势之一。
3 结 语
本文利用CiteSpace对中国知网CNKI 数据库中关于水下机器人研究的1 154篇文献进行计量分析,发现:目前关于水下机器人研究的发展趋势处于上升阶段,研究学者合作关系较为密切,发文量较多且质量大都较高,但最受该领域学者喜爱的期刊的质量仍需进一步提高。“水下机器人”“神经网络”“运动控制”“控制系统”“S面控制”这五个关键词为水下机器人领域的热点。水下机器人内部软件的研究和水下机器人的仿真技术研究为水下机器人领域的主要研究方向;同时根据突现词探测分析,滑膜控制、计算流体力学、路径规划很可能是未来的研究趋势。
注:本文通讯作者为成尔卓。
参考文献
[1]胡德坤.建设海洋强国是我国历史性的战略选择[J].武汉大学学报(哲学社会科学版),2013,66(3):5-7.
[2]曹祥康,谢存禧.我国机器人发展历程[J].机器人技术与应用,2008,21(5):44-46.
[3]李硕,刘健,徐会希,等.我国深海自主水下机器人的研究现状
[J].中国科学:信息科学,2018,48(9):1152-1164.
[4]高茜,王翔.基于水下机器人的海洋环境监测应用探索[J].科学技术创新,2020,24(17):92-93.
[5]陈悦,陈超美,刘则渊,等. Cite Space知识图谱的方法论功能[J].科学学研究,2015,33(2):242-253.
[6]赵丹青,李培琳.国内房地产投资信托基金研究可视化分析[J].中国物价,2020,33(4):63-66.
[7]邓娇娇,陈晨,刘洋.建筑工人安全/不安全行为研究的回溯与展望:基于知识图谱分析[J].安全与环境工程,2021,28(5):27-35.
[8]胡臻,张阳.基于普赖斯定律与综合指数法的核心作者和扩展核心作者分析—以《西南民族大学学报》(自然科学版)为例[J].西南民族大学学报(自然科学版),2016,42(3):351-354.
[9]韩晓伟,吴尽,郝磊,等. 1982—2017年国外学校体育研究进展分析—基于知识图谱的可视化分析[J].北京体育大学学报,2018,41(6):84-92.
[10]蒋菲. 新世纪中国课程与教学论的知识图谱研究[D].长沙:湖南师范大学,2014.
[11]张蒙蒙,刘天平,杨建辉.精准扶贫研究的现状、热点与趋势—基于CNKI和CiteSpace可视化视角[J].中国农业资源与区划,2019,40(8):11-19.
[12]李树祯,成尔卓,雷尚坤,等.“一带一路”视角下跨境电商研究的现状、热点与趋势—基于2015~2021年CNKI文献的计量分析[J].现代商业,2022,17(6):42-46.
[13]刘千里,吴晖.水下无线传感器网络通信技术研究现状及趋势[J].舰船电子工程,2022,42(9):20-24.
[14]石晴晴,牛文栋,张润锋,等.水下滑翔机路径规划研究综述及展望[J].中国舰船研究,2023,18(1):29-42.
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
海洋信息技术与应用(2020年1期)2020-06-11 12:43:56
传媒评论(2019年4期)2019-07-13 05:49:14
河南图书馆学刊(2016年12期)2017-01-09 09:55:39
现代情报(2016年11期)2016-12-21 23:54:23
现代情报(2016年10期)2016-12-15 12:27:57
新教育时代·教师版(2016年33期)2016-12-02 22:26:31
智富时代(2016年12期)2016-12-01 16:28:41
中学生物学(2016年10期)2016-11-19 12:23:04
