
水陆两栖龟型载重机器人
2024-09-12 00:00:00陈泽梁栋夏天黄明朱鹏唐劲阳
物联网技术 2024年2期
关键词:物联网技术

摘 要:针对陆地仿生机器人无法下水、水面作业机器人无法上岸的痛点,以及常见的球形两栖机器人在陆地载重运输时,无法保证其载重稳定性,在水中灵活性不高等现状,本文提出了一种水陆两栖龟型载重机器人的设计。对“龟背”展开机构进行设计,展开“龟背”后形成载物平台,在提供浮力的同时提升水面负载能力。“龟背”装置利用水面的浮力、上下臂以及外推杆实现展开后的自锁功能,保证了载重的稳定性。“龟腿”采用简单的合页原理,提高机器人在水中的灵活性。经实验计算证明,“龟背”载重可达自身重量的5倍,“龟腿”可在仅靠舵机驱动的方式下提高划行效率。并利用ESP8266 WiFi串口模块和ESP8266 Web Server库搭建网页服务器,通过浏览器访问进行设备控制。
关键词:水陆两栖;仿生机器人;折叠开合机构;四足机器人;载重机器人; 物联网技术
中图分类号:TP242.6 文献标识码:A 文章编号:2095-1302(2024)02-0-03
0 引 言
近年来,各种类型的机器人得到广泛关注。有采用腿足式、履带-浆式、轮浆式的仿生机器人[1-3],有以蜥蜴为仿生原型的Kim[4]六足机器人,有基于多关节变形鳍设计的AmphiHex-I机器人[5]和以分体式机体的摆动实现两栖环境游走的游走式机器人[6],还有两栖球形机器人[7]。这些机器人通过模仿某一种两栖生物来实现运动,两栖环境适应程度有限[8]。本项目借鉴生物龟的身体结构特点和运动方式,设计了一款具有高负载性、多变形性等特点的两栖仿生龟形态机器人。针对当前陆地仿生机器人无法下水、水面作业机器人无法上岸以及现阶段两栖仿生机器人作业能力不强的痛点,以传统四足机器人为基础载体,对其“背部”和“腿部”重新设计,提高其灵活性、续航能力、水陆全能能力、水面运载能力。
本项目是对提高水陆两栖机器人实用性的探索,具有很强的现实意义。
1 “龟背”展开机构
设计可展开、收缩自由转换的龟背装置,展开后的龟背装置像翻过来的龟壳,展开后的面积为原来的四倍,增大了机器人的浮力和水面负载能力,容载空间较大,在水面上运载时负载可达到自身重量的5倍。
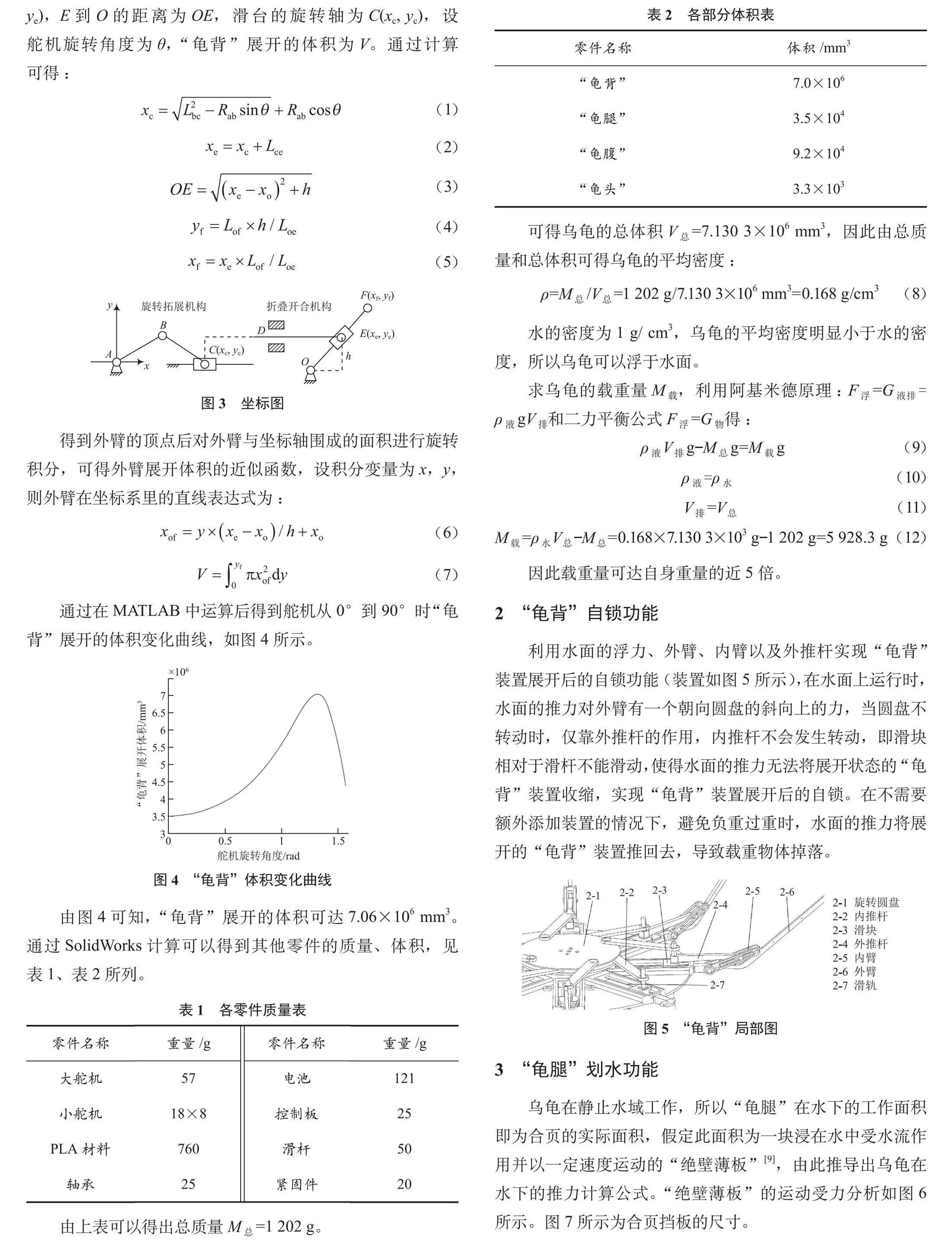
“龟背”的展开机构主要是旋转拓展和折叠打开两种联动开合机构。此机构中包括基准板、滑块、内推杆、旋转圆盘组成的旋转拓展机构以及外推杆和外臂组成的折叠开合机构,如图1所示。滑块固定在滑杆上,由舵机给旋转圆盘提供旋转驱动力,带动内推杆推动滑块,从而推动外推杆带动外臂实现机构的展开。
“龟背”的展开体积随着外臂展开角度的不同而不同,体积与浮力相关,图2和图3所示分别为“龟背”的机构简图和坐标图。以大舵机的旋转轴为原点,此机构由旋转拓展机构和折叠开合机构组成。由SolidWorks测量可得旋转圆盘半径Rab=37 mm、内推杆Lbc=59.15 mm、外推杆Lce=55 mm、
外臂Lof=119.64 mm、外臂旋转轴距离舵机的水平距离xo=115.58 mm、外推杆到“龟背”底端的垂直距离
h=11.15 mm。
外臂的顶点为F(xf, yf)、外推杆和外臂的连接处为E(xe, ye),E到O的距离为OE,滑台的旋转轴为C(xc, yc),设舵机旋转角度为θ,“龟背”展开的体积为V。通过计算
可得:
(1)
(2)
(3)
(4)
(5)
得到外臂的顶点后对外臂与坐标轴围成的面积进行旋转积分,可得外臂展开体积的近似函数,设积分变量为x,y,则外臂在坐标系里的直线表达式为:
(6)
(7)
通过在MATLAB中运算后得到舵机从0°到90°时“龟背”展开的体积变化曲线,如图4所示。
由图4可知,“龟背”展开的体积可达7.06×106 mm3。通过SolidWorks计算可以得到其他零件的质量、体积,见表1、表2所列。
可得乌龟的总体积V总=7.130 3×106 mm3,因此由总质量和总体积可得乌龟的平均密度:
ρ=M总/V总=1 202 g/7.130 3×106 mm3=0.168 g/cm3" " " (8)
水的密度为1 g/ cm3,乌龟的平均密度明显小于水的密度,所以乌龟可以浮于水面。
求乌龟的载重量M载,利用阿基米德原理:F浮=G液排=
ρ液gV排和二力平衡公式F浮=G物得:
ρ液V排g-M总g=M载g" " " " " " " " " " " " " " "(9)
ρ液=ρ水" " " " " " " " " " (10)
V排=V总" " " " " " " " " " " " " " " " " " " "(11)
M载=ρ水V总-M总=0.168×7.130 3×103 g-1 202 g=5 928.3 g" (12)
因此载重量可达自身重量的近5倍。
2 “龟背”自锁功能
利用水面的浮力、外臂、内臂以及外推杆实现“龟背”装置展开后的自锁功能(装置如图5所示),在水面上运行时,水面的推力对外臂有一个朝向圆盘的斜向上的力,当圆盘不转动时,仅靠外推杆的作用,内推杆不会发生转动,即滑块相对于滑杆不能滑动,使得水面的推力无法将展开状态的“龟背”装置收缩,实现“龟背”装置展开后的自锁。在不需要额外添加装置的情况下,避免负重过重时,水面的推力将展开的“龟背”装置推回去,导致载重物体掉落。
3 “龟腿”划水功能
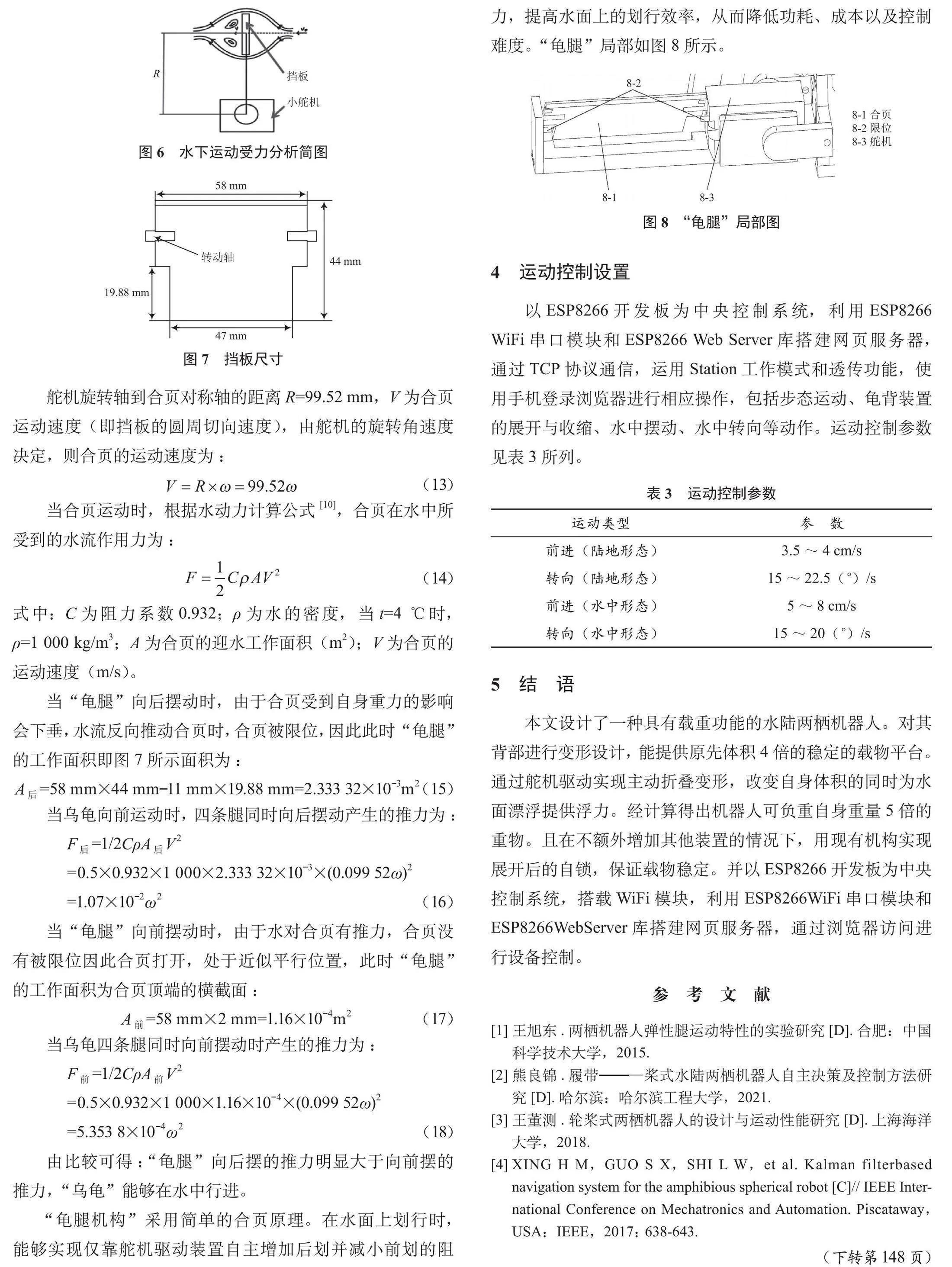
乌龟在静止水域工作,所以“龟腿”在水下的工作面积即为合页的实际面积,假定此面积为一块浸在水中受水流作用并以一定速度运动的“绝壁薄板”[9],由此推导出乌龟在水下的推力计算公式。“绝壁薄板”的运动受力分析如图6所示。图7所示为合页挡板的尺寸。
舵机旋转轴到合页对称轴的距离R=99.52 mm,V为合页运动速度(即挡板的圆周切向速度),由舵机的旋转角速度决定,则合页的运动速度为:
(13)
当合页运动时,根据水动力计算公式[10],合页在水中所受到的水流作用力为:
(14)
式中:C为阻力系数0.932;ρ为水的密度,当t=4 ℃时,ρ=1 000 kg/m3;A为合页的迎水工作面积(m2);V为合页的运动速度(m/s)。
当“龟腿”向后摆动时,由于合页受到自身重力的影响会下垂,水流反向推动合页时,合页被限位,因此此时“龟腿”的工作面积即图7所示面积为:
A后=58 mm×44 mm-11 mm×19.88 mm=2.333 32×10-3m2 (15)
当乌龟向前运动时,四条腿同时向后摆动产生的推力为:
F后=1/2CρA后V2
=0.5×0.932×1 000×2.333 32×10-3×(0.099 52ω)2
=1.07×10-2ω2" " " " " "(16)
当“龟腿”向前摆动时,由于水对合页有推力,合页没有被限位因此合页打开,处于近似平行位置,此时“龟腿”的工作面积为合页顶端的横截面:
A前=58 mm×2 mm=1.16×10-4m2" " " " " " nbsp; " " " " " " " "(17)
当乌龟四条腿同时向前摆动时产生的推力为:
F前=1/2CρA前V2
=0.5×0.932×1 000×1.16×10-4×(0.099 52ω)2
=5.353 8×10-4ω2" " " " " "(18)
由比较可得:“龟腿”向后摆的推力明显大于向前摆的推力,“乌龟”能够在水中行进。
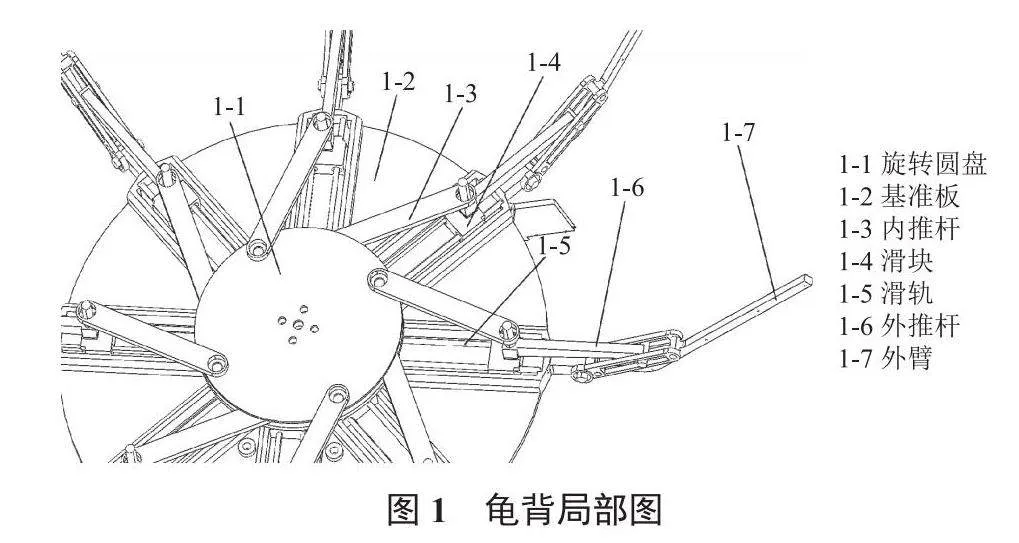
“龟腿机构”采用简单的合页原理。在水面上划行时,能够实现仅靠舵机驱动装置自主增加后划并减小前划的阻力,提高水面上的划行效率,从而降低功耗、成本以及控制难度。“龟腿”局部如图8所示。
4 运动控制设置
以ESP8266开发板为中央控制系统,利用ESP8266 WiFi串口模块和ESP8266 Web Server库搭建网页服务器,通过TCP协议通信,运用Station工作模式和透传功能,使用手机登录浏览器进行相应操作,包括步态运动、龟背装置的展开与收缩、水中摆动、水中转向等动作。运动控制参数见表3所列。
5 结 语
本文设计了一种具有载重功能的水陆两栖机器人。对其背部进行变形设计,能提供原先体积4倍的稳定的载物平台。通过舵机驱动实现主动折叠变形,改变自身体积的同时为水面漂浮提供浮力。经计算得出机器人可负重自身重量5倍的重物。且在不额外增加其他装置的情况下,用现有机构实现展开后的自锁,保证载物稳定。并以ESP8266开发板为中央控制系统,搭载WiFi模块,利用ESP8266WiFi串口模块和ESP8266WebServer库搭建网页服务器,通过浏览器访问进行设备控制。
参考文献
[1]王旭东.两栖机器人弹性腿运动特性的实验研究[D].合肥:中国科学技术大学,2015.
[2]熊良锦.履带——桨式水陆两栖机器人自主决策及控制方法研究[D].哈尔滨:哈尔滨工程大学,2021.
[3]王董测.轮桨式两栖机器人的设计与运动性能研究[D].上海海洋大学,2018.
[4] XING H M,GUO S X,SHI L W,et al. Kalman filterbased navigation system for the amphibious spherical robot [C]// IEEE Inter-national Conference on Mechatronics and Automation. Piscataway,USA:IEEE,2017: 638-643.
[5] HOU X H,GUO S X,SHI L W,et al. Improved model predictive-based underwater trajectory tracking control for the biomimetic spherical robot under constraints [J]. Applied sciences,2020,10(22).
[6] DUDEK G,GIGUERE P,PRAHACS C,et al. AQUA:An amphibious autonomous robot [J]. Computer,2007,40(1):
46-53.
[7]迟兴,战强.水陆两栖球形机器人辅助鳍的水动力特性[J].中南大学学报(自然科学版),2021,52(5):1456-1464.
[8]殷谦,王何,宋震,等.两栖仿生机器人登陆自适应越障机构优化设计[J].国防科技大学学报,2023,45(1):208-214.
[9]姬长英,潘君拯.水田链桨式驱动装置推力计算[J]. 农业工程学报,1994,10(4):37-43.
[10]忻鼎亮,席德胤.船桨的设计及其力学原理[J].体育科研,1988,29(10):34-37.
猜你喜欢
电子技术与软件工程(2016年20期)2016-12-21 09:37:17
电子技术与软件工程(2016年19期)2016-12-19 17:21:51
电子技术与软件工程(2016年19期)2016-12-19 17:16:19
电子技术与软件工程(2016年19期)2016-12-19 17:15:35
电脑知识与技术(2016年27期)2016-12-15 18:27:52
中国市场(2016年32期)2016-12-06 11:53:37
商情(2016年40期)2016-11-28 11:05:43
中国市场(2016年41期)2016-11-28 05:39:01
商情(2016年39期)2016-11-21 08:47:03
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:58:27
