非机动车交通路口无线智能控制系统
2024-09-12 00:00:00马家琪李春树来翔
物联网技术 2024年4期

摘 要:针对非机动车在交通路口事故频发,存在较大安全隐患的问题,采用交互式验证编码设计了一种使非机动车在交通路口具备智能感知功能,能够辅助安全驾驶,且易于安装,便于推广使用的系统装置。系统主要由交通信息无线发射装置、车载信息接收装置、声音警报装置、光电提醒装置、车速控制装置组成。当非机动车上的车载接收装置接近交通路口时,将准确接收到特殊的交通编码信息,控制警报灯闪烁、发出警示声音,提醒非机动车骑行者此时已到达人行横道,需注意交通安全;同时,通过车载控速装置缓慢降低车速。系统赋予了非机动车“听”到信息,“看”懂交通,“自主”降速的能力,实现了非机动车智能感知、安全驾驶功能。当驶离交通路口安全距离后,自动解除所有限制,恢复车主全权控制状态。通过模拟仿真、电路实测,设计要求已全部实现,信息发射、接收距离可控,准确可靠。
关键词:智慧交通;辅助驾驶;信息编码;无线通信;自动控速;物联网
中图分类号:TP302.1 文献标识码:A 文章编号:2095-1302(2024)04-00-05
DOI:10.16667/j.issn.2095-1302.2024.04.021
0 引 言
人行横道是交通系统的重要组成部分。然而人行横道也是交通事故多发地,占城市综合交通事故的比重较大。据有关部门发布,2020年非机动车交通事故占总事故发生数的12.2%,2019年占死亡人数的6.98%[1]。随着人们对外卖业的大量需求,配送骑手们边看手机导航边“玩命”飞驰的现象屡见不鲜[2]。大数据显示,在人行横道上发生交通事故的主要原因是人车交通行为不规范,人车抢行或非机动车超速等[3]。除此之外,大雾天气下非机动车骑行者视线受阻,无法看清红绿灯,导致交通意外频发。
单片机具有可靠性高、控制功能强、功耗低等诸多优势,选其作为主控,既可满足需求,又可控制成本,利于推广。本文选用兼有通信距离远、通信量小,并且在技术成熟频段开放,无需审批的315 MHz无线电通信方式。作为一对带地址、数据编码功能的红外遥控发射/接收芯片,PT2262和PT2272是一款应用广泛的编解码芯片。本文充分利用该芯片的实用性、简便性并可提供大量地址码的特点,将其应用于交通路口,发送和接收无线通信编码[4]。为了加强非机动车和行人及人行横道的联系,本文设计了一套“懂”交通灯的智能非机动车系统,能对进入人行横道范围的非机动车起到警示和提醒作用,有效降低非机动车速度,规范非机动车交通秩序。
1 系统结构及软件设计
1.1 系统设计原理
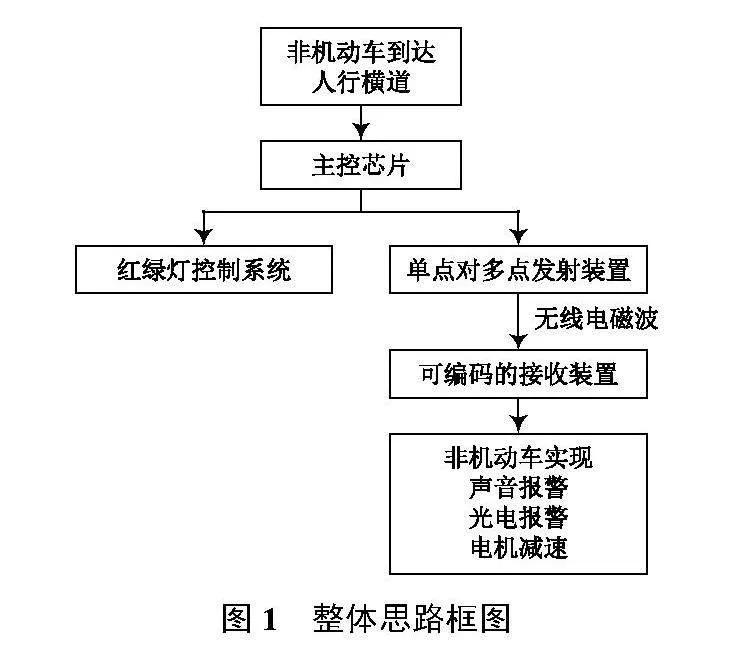
如图1所示,本系统结合交通灯控制装置,在东、西、南、北4个路口各设置一组红绿灯,模拟人行横道的交通信号灯情况;编程控制装置位于交通路口的发射装置处,可随机发射编码信号,当非机动车上的接收模块进入人行横道时会接收到信号,控制LED模块红灯闪烁、蜂鸣器发出提示音、降低电动车电机转速。提醒车主已到达人行横道,注意交通信号灯,并有效防止超速、逆行、抢行等交通违法行为,保障行人与车主的生命安全。本系统让无生命的物体具备智能感知能力,减少了交通路口的安全隐患,契合智慧交通发展目标[5-8]。
1.2 系统设计原理
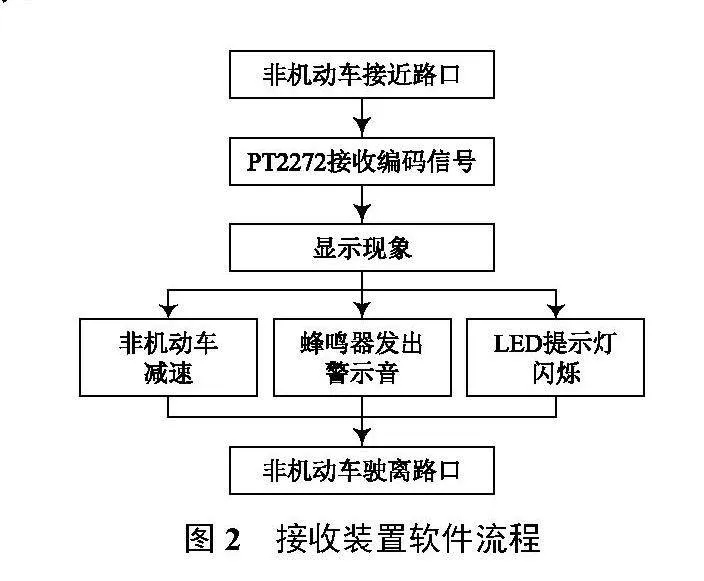
接收端如图2所示。系统软件设计主要包括交通路口红绿灯控制程序、延时程序、信息编码发送程序及接收程序、声音提醒、光电预警及减速控制程序、显示程序、中断服务子程序等。
本设计由主控单元模拟控制十字路口交通红绿灯,当南北方向绿灯时东西方向红灯,南北方向转变为红灯时东西方向转变为绿灯。无线接收模块主要用于控制非机动车声光提醒和减速,当目标非机动车驶入人行横道范围后,PT2272将准确接收特殊无线编码信号,控制非机动车减速、警报灯闪烁并发出声音提醒。
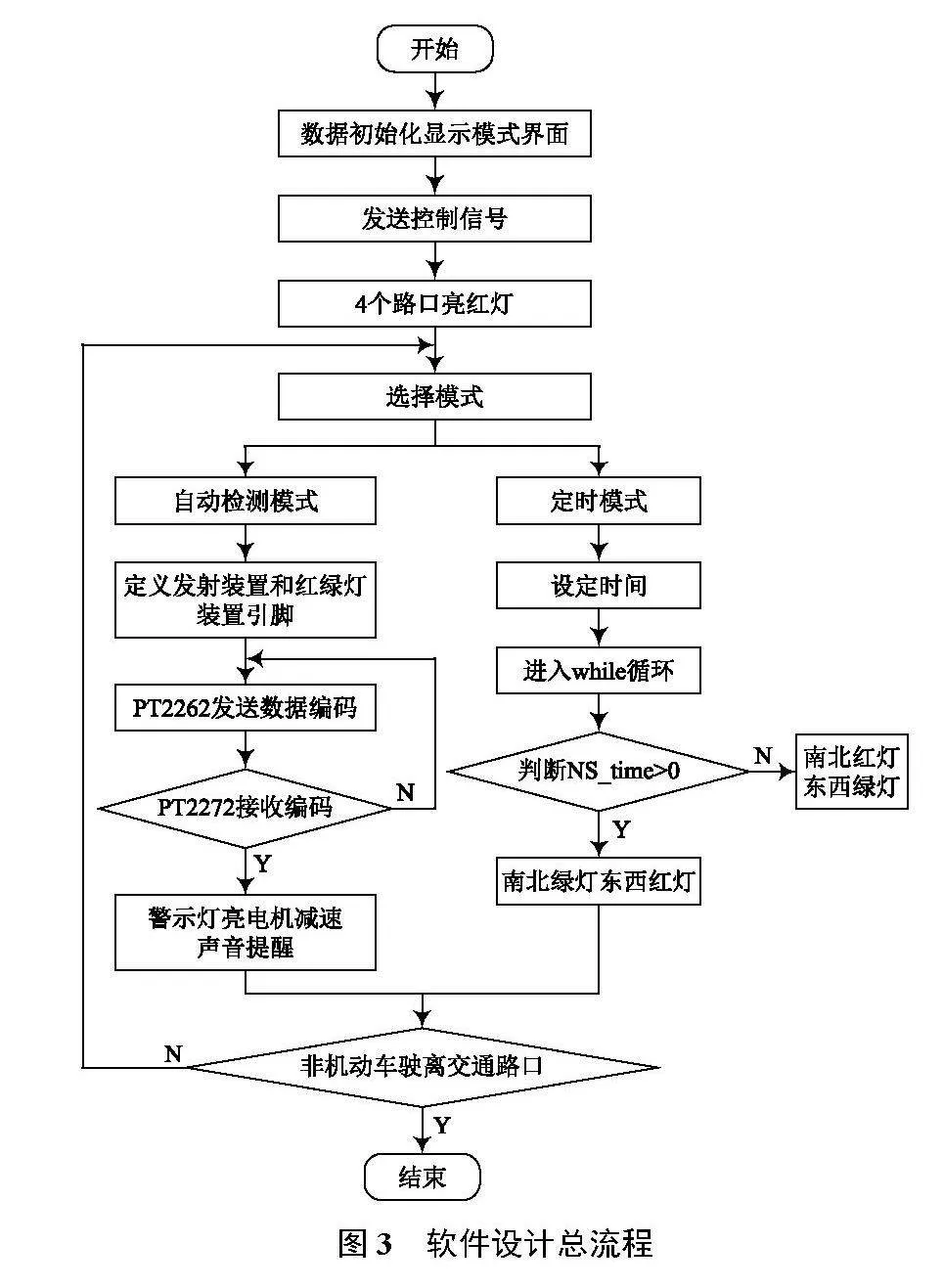
设计的软件程序可实时监测并控制路口交通流量,确保交通安全[9]。系统通过多种模块协同工作完成红绿灯闪烁、计时显示等功能,从而实现智能交通路口的控制与监测。具体软件设计总流程如图3所示。
程序通过初始化子函数、编码发送子函数、更新缓冲子函数、显示子函数以及T0中断服务子程序等模块实现计时器功能和实时更新计时值,采用多次循环实现了南北、东西方向的交通灯状态交替控制[10]。在程序运行过程中,不断更新倒计时缓冲区,通过七段数码管以及控制位及时显示当前交通灯的状态,实现了可视化界面的处理,达到合理规划道路交通的目的。程序通过编码发送子函数SDCODE实现了对PT2262无线通信模块的调用和交通灯控制,使通信模块和交通灯模块配合良好。不同模块相互独立,提高了系统的鲁棒性和可维护性。
主函数先将所有交通灯置为红灯,等待计时开始。在循环中,分别控制南北、东西方向的交通灯状态,实现其红绿灯交替循环的效果。在定时器中断函数中,实现计时器功能并实时更新计时值。同时,更新缓冲子函数RFBUFF和7段数码管显示函数DISPLAY,合理显示计时值。该程序采用多种技术手段协同工作,如编码发送方式、定时器控制方式、计时器技术等,从而实现了智能化、精准化的交通流量掌控。
2 硬件电路设计
系统采用Altium Designer 20软件设计硬件电路,各模块电路如图4~图6所示。系统主要由红绿灯控制模块、无线编码发射模块和无线数据接收模块组成。
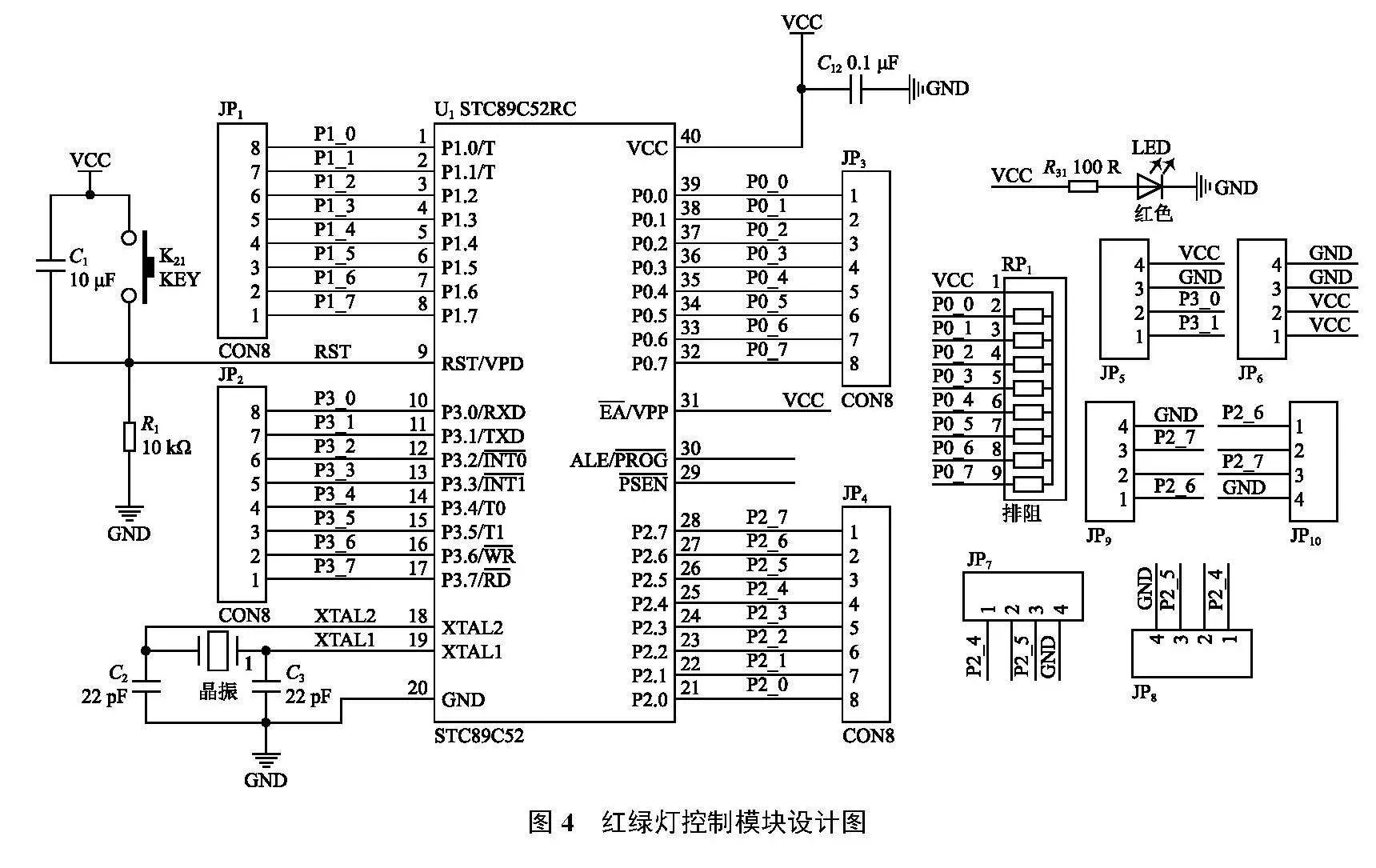
2.1 红绿灯控制模块的设计
该模块主要包含主控芯片和红绿灯控制模块及其他外围电路,置于交通路口,软件控制模拟红绿灯按照系统设定变化。单片机作为红绿灯模块主控芯片,各引脚功能及连线如图4所示。将P2.0~P2.7定义为红绿灯控制位,采取共阳极接法,其中P2.0~P2.3分别控制南北方向十位变化、南北方向个位变化、东西方向十位变化、东西方向个位变化;P2.4~P2.7分别为南北方向绿灯控制引脚、南北方向红灯控制引脚、东西方向绿灯控制引脚、东西方向红灯控制引脚。将P1.0~P1.3定义为南北方向无线发射装置控制引脚,P1.4~P1.7为东西方向无线发射装置控制引脚。
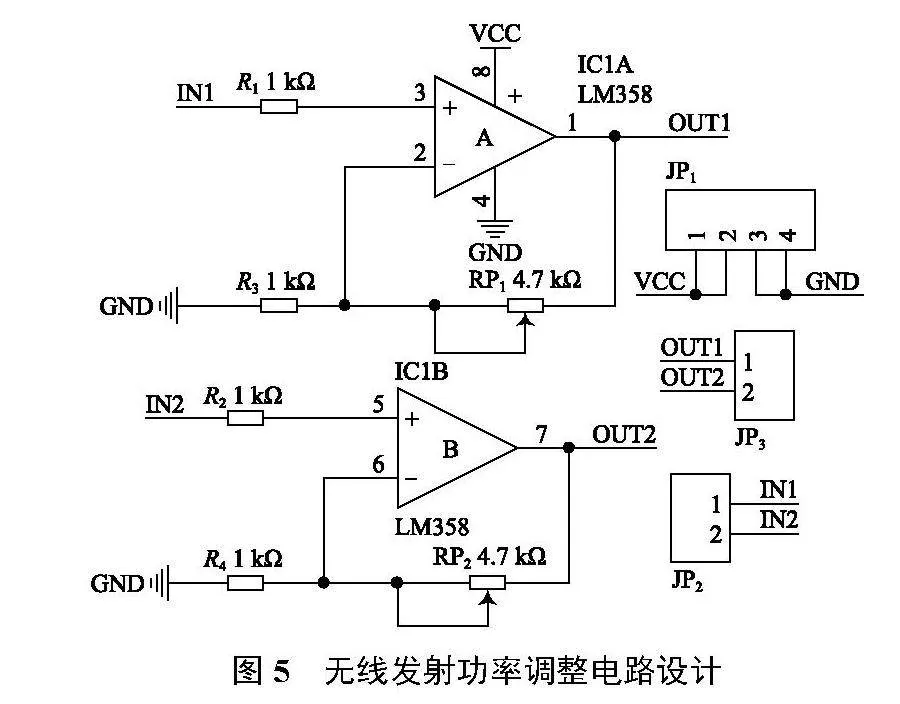
2.2 无限编码发射模板的设计
该模块如图5所示。模块包括数据编码芯片、控制芯片及无线发射功率调整电路。数据编码芯片采用6通道电控PT2262无线数据发射模块,发出的编码信号由地址码、数据码、同步码组成,用以设计特殊编码信息,向驶入交通路口监测范围内的非机动车发射编码信号,发射距离可根据实际交通路口调节;PT2262共有18个引脚,最多可提供12位
(A0~A11)三态地址端管脚(悬空、接高电平、接低电平)以及6位数据引脚,任意组合可提供531441地址码。主控芯片由单片机实现,为提高稳定性,使PT2262模块的使能引脚与单片机相连。
芯片会在引脚电平置高时连续发送信号,所以电平置高的时间越长,发送信息的次数也就越多。但如果电平置高时间过长,将增加电路功耗并降低无线遥控的实时性。因此,需要精确控制电平置高的时间以达到最佳工作状态。电平置高时长可通过程序设定,测试得出,单片机置高时长为
200 ms时通信效果最佳。若时间过短,则受到外界干扰和噪声影响的可能性增大。因此,提高电平输出时间是有效的抗干扰手段。
2.3 无线数据接收模块的设计
接收端如图6所示,其主要由PT2272无线数据接收模块、解码芯片、LED提示灯模块、蜂鸣器提示模块[11]、电机控速模块以及上述模块的抗干扰外围电路组成。该模块安装于非机动车上,解码芯片检测无线数据接收模块接收到的编码并对其进行判断,PT2272接收来自无线发射模块发送的信息编码并作出反应。
3 系统仿真与实物测试
3.1 系统仿真测试
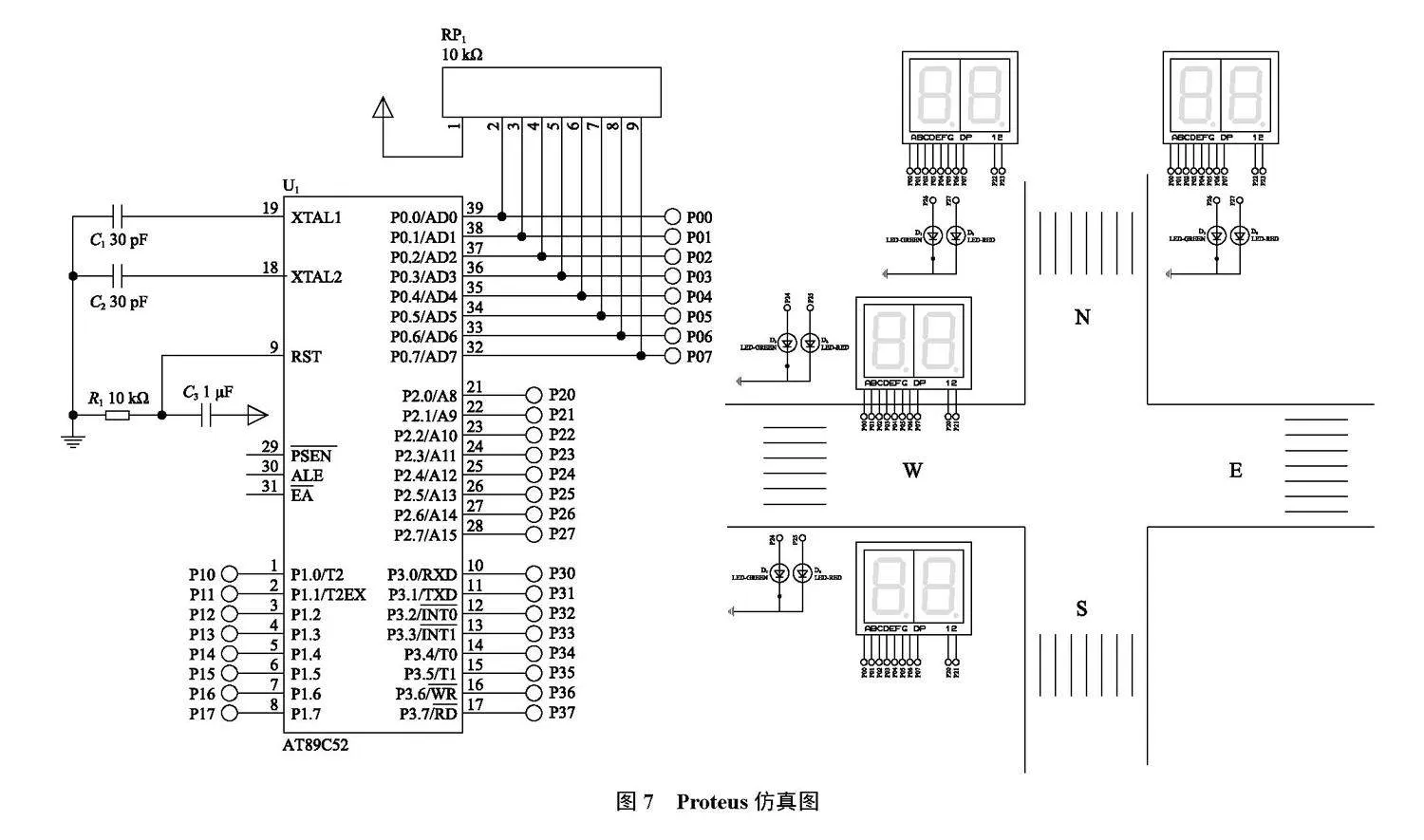
为测试系统电路性能,采用Proteus软件对整体电路进行仿真,结果如图7所示。电路主要由单片机最小系统模块、交通指示灯模块、信息无线发射模块、车载信息接收模块、声音警报模块、光电提醒模块和车速控制模块组成,仿真测试完全达到了设计要求,效果良好。
3.2 无线数据收发模块测试
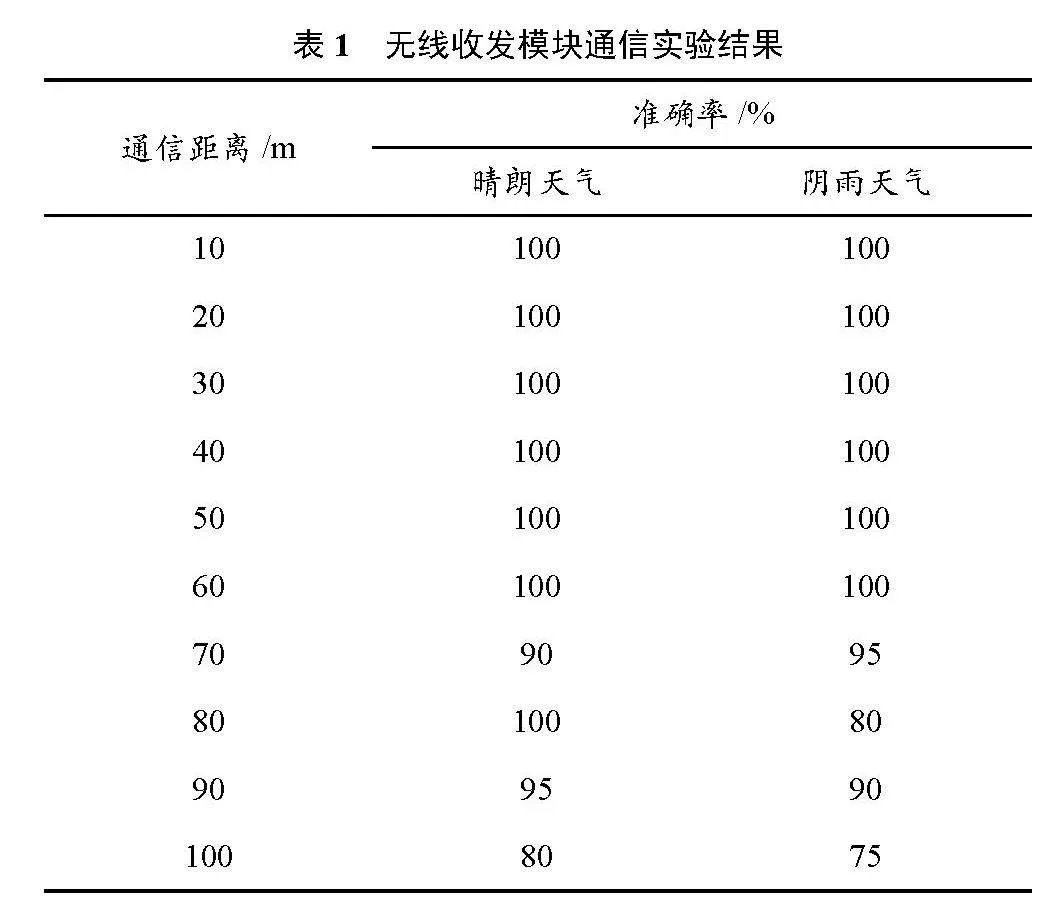
通常交通距离信号灯的通信距离不超过50 m,并且不会存在遮挡。为了验证可靠性及稳定性,本系统以无遮挡为前提,在不同距离不同天气状况下做了多组实验,统计了12次
信号收发通信准确率,实验结果见表1所列。
结果显示,最终系统的总体稳定性达到了设计要求,在60 m及以下不同天气条件下均可实现100%的通信准确性,在100 m通信距离且天气晴朗的户外条件下系统通信的准确率达到80%。在实验中,MCU工作稳定,未出现“死机”情况,实验现象与结果均与预期一致。
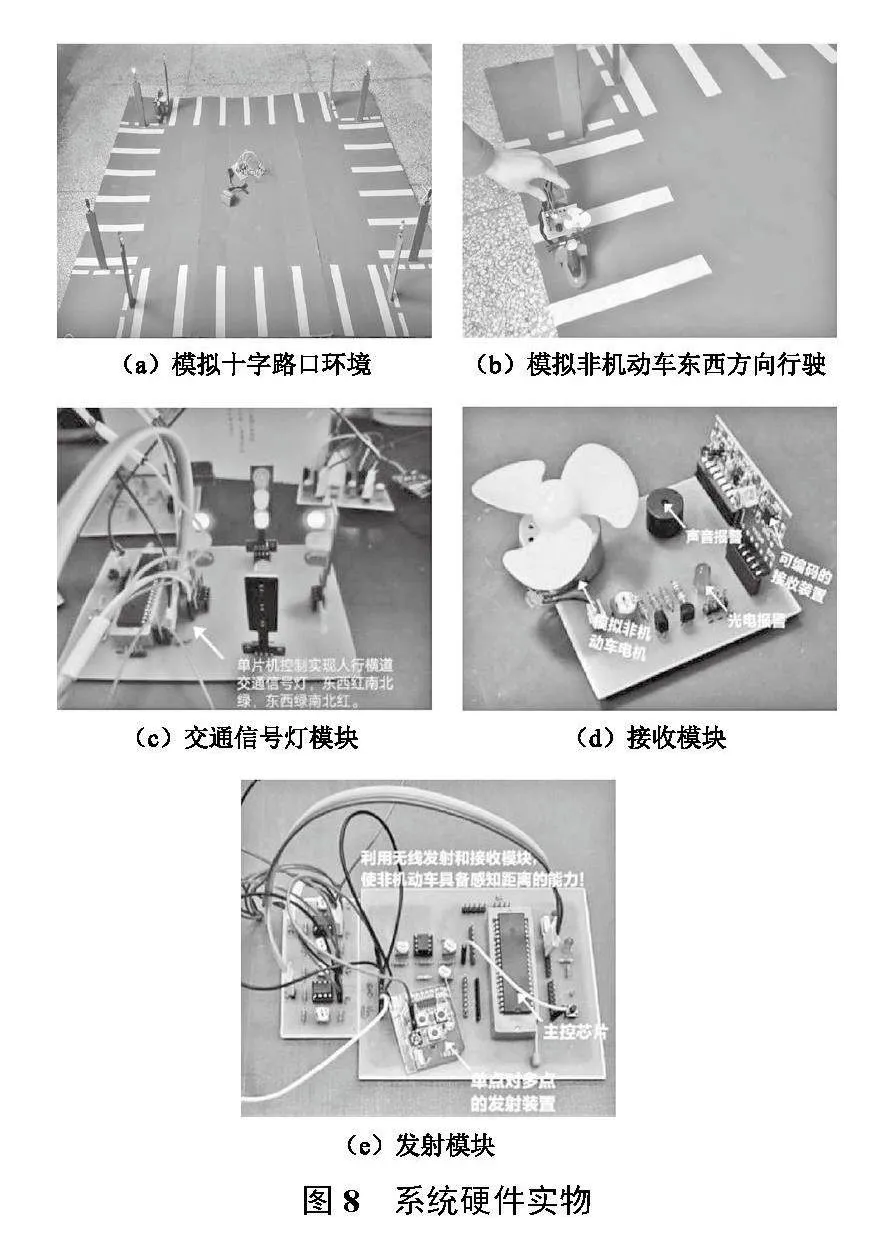
3.3 系统整体调试
系统在东西南北4个方向各放置1组交通红绿灯,用于模拟实际交通环境,发射装置放置在十字路口中央,接收装置放置在非机动车上,如图8(a)所示。首先使非机动车从东西方向驶来,当进入人行横道覆盖范围时,非机动车警示灯闪烁,蜂鸣器报警,电机降速,当驶离人行横道时,非机动车恢复正常模式,实验如图8(b)所示。再次使非机动车自南北驶来,同样能实现上述功能。其中,交通信号灯模块、接收模块和发射模块焊接实物及实验演示分别
如图8(c)~图8(e)所示。
从上述分析可知,本设计有效可行,当非机动车进入人行横道发射系统覆盖范围时,能降低电机转速并以蜂鸣器、警示灯提醒非机动车驾驶员,可有效降低人行横道交通事故发生率,保障行车安全,为非机动车安全驾驶、群众出行保驾护航[12]。
4 结 语
本系统搭建的无线遥控交通灯系统可实现声光预警、自动控速功能。无线信息发射电路经过实际测试,遥控距离可控且超过100 m,并且采用的特殊编码能够稳定接收信号,实现信息感知。其电路易于实现、控制灵活、性价比高、抗干扰能力强,具有很强的实用价值,能够协助交警在交通高峰期有效疏导交通[13]。本交通系统的设计让无生命的物体具备智能感知能力,减少了十字路口的安全隐患,与创建文明城市、实现可持续交通系统的观念不谋而合。如果可以作为未来智能交通系统的一部分,必将起到缓解交通压力、提高社会资源利用率的作用[14]。
注:本文通讯作者为李春树。
参考文献
[1]国家统计局.中国统计年鉴[M].北京:中国统计出版社,2019.
[2]魏哲哲. 提高安全意识 依法依规通行[N]. 人民日报,2023-02-13(011).
[3]于昊,赵琳娜,戴帅.城市电动自行车交通安全发展趋势及应对策略[J].城市交通,2022,20(1):76-82.
[4] LIU C Y,PENG M F,YU S Y,et al. Traffic Light Remote Control System Based on DF Data Transceiver Module [C]// Software Engineering and Information Technology:Proceedings of the 2015 International Conference on Software Engineering and Information Technology(SEIT2015). 2016:55-60.
[5]杨艳,陈凤.基于信号检测的行人过街安全装置[J].电子测试,2020,27(9):31-33.
[6]周玉宏.过街人行横道信号灯智能化设计[J].科技与创新,2020,7(18):134-135.
[7]金茂菁.我国智能交通系统技术发展现状及展望[J].交通信息与安全,2012,30(5):1-5.
[8]王国锋,宋鹏飞,张蕴灵.智能交通系统发展与展望[J].公路,2012,57(5):217-222.
[9] BENTO L C,PARAFITA R,SANTOS S,et al. Intelligent traffic management at intersections:Legacy mode for vehicles not equipped with V2V and V2I communications [C]// 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE,2013:726-731.
[10] SUN M Z,CUI S H,TAN B F. Design of an experiment rig for traffic light control system based on freescale MCU [C]// Materials,Manufacturing Technology,Electronics and Information Science (MMTEI2015)Proceedings for the 2015 International Workshop on Materials,Manufacturing Technology,Electronics and Information Science(MMTEI2015). 2016:258-266.
[11] YANG B,YANG J,LI J. Design of Automatic Control System for Water Level of Water Tank Based on Proteus and Keil Software [C]// 2020 International Conference on Applications and Techniques in Cyber Intelligence:Applications and Techniques in Cyber Intelligence(ATCI 2020). Springer International Publishing,2021:598-605.
[12] MACHERET P D,SAVCHUK R R,SHKURATOV G I. Intelligent Transport Systems:Analysis of the Current State and Prospects of Development [C]// 2021 International Conference on Quality Management,Transport and Information Security,Information Technologies(ITamp;QMamp;IS),Yaroslavl,Russian Federation,2021:234-237.
[13] YAN X,ZHANG H,WU C. Research and Development of Intelligent Transportation Systems [C]// 2012 11th International Symposium on Distributed Computing and Applications to Business,Engineering amp; Science,Guilin,China,2012:321-327.
[14] LIN Y,WANG P,MA M. Intelligent transportation system (ITS):Concept,challenge and opportunity [C]// 2017 ieee 3rd international conference on big data security on cloud(bigdatasecurity),ieee international conference on high performance and smart computing (hpsc),and ieee international conference on intelligent data and security(ids). IEEE,2017:167-172.
收稿日期:2023-04-13 修回日期:2023-05-17
作者简介:马家琪(2001—),女,硕士研究生,研究方向为物联网工程、电磁场与微波技术。
李春树(1974—),男,教授,博士,研究方向为无线通信、信道编码及图像处理等。
来 翔(1999—),男,硕士研究生,研究方向为嵌入式、图像处理。
猜你喜欢
农家科技下旬刊(2016年9期)2016-12-15 14:30:38
电脑知识与技术(2016年26期)2016-11-25 00:00:00
民生周刊(2016年21期)2016-11-19 14:27:31
电脑知识与技术(2016年24期)2016-11-14 02:05:43
电子技术与软件工程(2016年18期)2016-11-14 00:55:58
中国科技博览(2016年19期)2016-10-19 14:58:22
中国科技博览(2016年19期)2016-10-19 11:59:52
电脑知识与技术(2016年21期)2016-10-18 22:33:02
环球时报(2016-08-01)2016-08-01 07:04:45
现代经济信息(2016年7期)2016-05-19 14:03:14