
基于干扰观测器的AUV三维路径滑模跟踪控制
2024-08-31 00:00:00王庆楠王娜李广有尹庆华
机械制造与自动化 2024年3期













摘 要:为了确保欠驱动自主式水下机器人(AUV)在受到外界干扰情况下仍然可以实现对三维路径的跟踪控制,设计基于干扰观测器的反步滑模控制器。针对欠驱动AUV 5自由度状态方程,考虑外界干扰对AUV运动的影响,设计干扰观测器实时估计干扰;通过欠驱动AUV的状态方程与三维路径跟踪误差模型得到系统的镇定模型;利用得到的干扰估计值,设计反步滑模复合控制器来控制AUV实现三维路径跟踪,并通过Lyapunov稳定性理论证明闭环系统渐近稳定。仿真结果表明:该控制器对欠驱动AUV实现三维路径的精确跟踪有良好的控制效果和抗干扰能力。
关键词:欠驱动自主水下机器人;三维路径跟踪;干扰观测器;反步滑模控制
中图分类号:TP242.2文献标志码:A文章编号:1671-5276(2024)03-0209-06
Sliding Model Tracking Control for AUV Three Dimensional Path Based on Disturbance Observer
Abstract:In order to ensure that the underactuated autonomous underwater vehicle (AUV) can still track and control the 3D path in the case of external interference, a backstepping sliding mode controller based on disturbance observer is designed. According to the 5-DOF state equation of underactuated AUV, an interference observer is designed to estimate the interference in real time considering the influence of external interference on the motion of AUV. The stabilization model of the system is obtained through the state equation of the underactuated AUV and the 3D path tracking error model. A backstepping sliding mode composite controller is designed to control the AUV and realize the 3D path tracking. The closed-loop system is proved to be asymptotically stable by Lyapunov stability theory. The simulation results show that the controller has good control effect and anti-interference ability for the accurate tracking of 3D path of underactuated AUV.
Keywords:underactuated autonomous underwater vehicle; 3D path tracking; nonlinear disturbance observer; backstepping sliding mode control
0 引言
自主水下机器人(AUV)由于具有较高的机动性和系统可靠性,在实现海洋科学调查、水下勘探和海洋目标探查中起到重要作用[1]。AUV的路径跟踪控制是实现以上任务的保障。但由于AUV在复杂的海下环境作业时易受风、浪等干扰的影响[2],因此提高AUV在路径跟踪过程中的抗干扰能力有重要意义。
近年来,AUV的路径跟踪问题已引起学者们广泛关注。文献[3]针对AUV水平面模型,基于视线导引法建立跟踪误差模型,在控制器设计中结合模型预测算法,提高了AUV在水平面轨迹跟踪的精度。文献[4]针对AUV水平面模型受到干扰的情况,设计了基于干扰观测器的滑模控制器,补偿外界干扰带来的影响,提高了AUV在水平面的跟踪性能。文献[5]对于欠驱动AUV受到干扰以及模型不确定性情况下的水平面路径跟踪问题,设计了基于自适应反步控制算法与模糊控制算法结合的控制器,提高系统的抗干扰能力。针对AUV在垂直面的路径跟踪问题,文献[6]将Lyapunov直接法与反步法结合设计控制器,使AUV以期望的合成速度跟踪预定的深度路径。文献[7]设计了静态输出反馈控制器来提高AUV在垂直面的跟踪精度。上述文献只研究了AUV在水平面或垂直面的路径跟踪问题。文献[8]通过运用“虚拟向导”法建立三维路径跟踪误差模型,采用滤波反步算法,解决了AUV三维路径跟踪控制问题。文献[9]使用反步法设计了具有非线性动态特性的控制器,并应用到欠驱动AUV的三维轨迹跟踪控制上,提高了AUV三维路径的跟踪性能。文献[10]针对欠驱动AUV 6自由度模型受到不确定性影响,在控制器设计中将对角回归神经网络与S面控制算法结合,提高了跟踪的精度。以上文献均未考虑AUV受到外界干扰情况下的三维路径跟踪问题。
本文针对欠驱动AUV 5自由度模型受到干扰影响下的三维路径跟踪问题,设计了基于干扰观测器的反步滑模控制器(DOBSMC),实现欠驱动AUV的三维路径跟踪控制。
1 欠驱动AUV数学模型
通过定义固定坐标系{I}:E-ξηζ和刚体坐标系{B}:O-xyz来描述欠驱动AUV的运动,如图1所示。图中θ为纵摇角与ψ为艏摇角代表姿态向量。
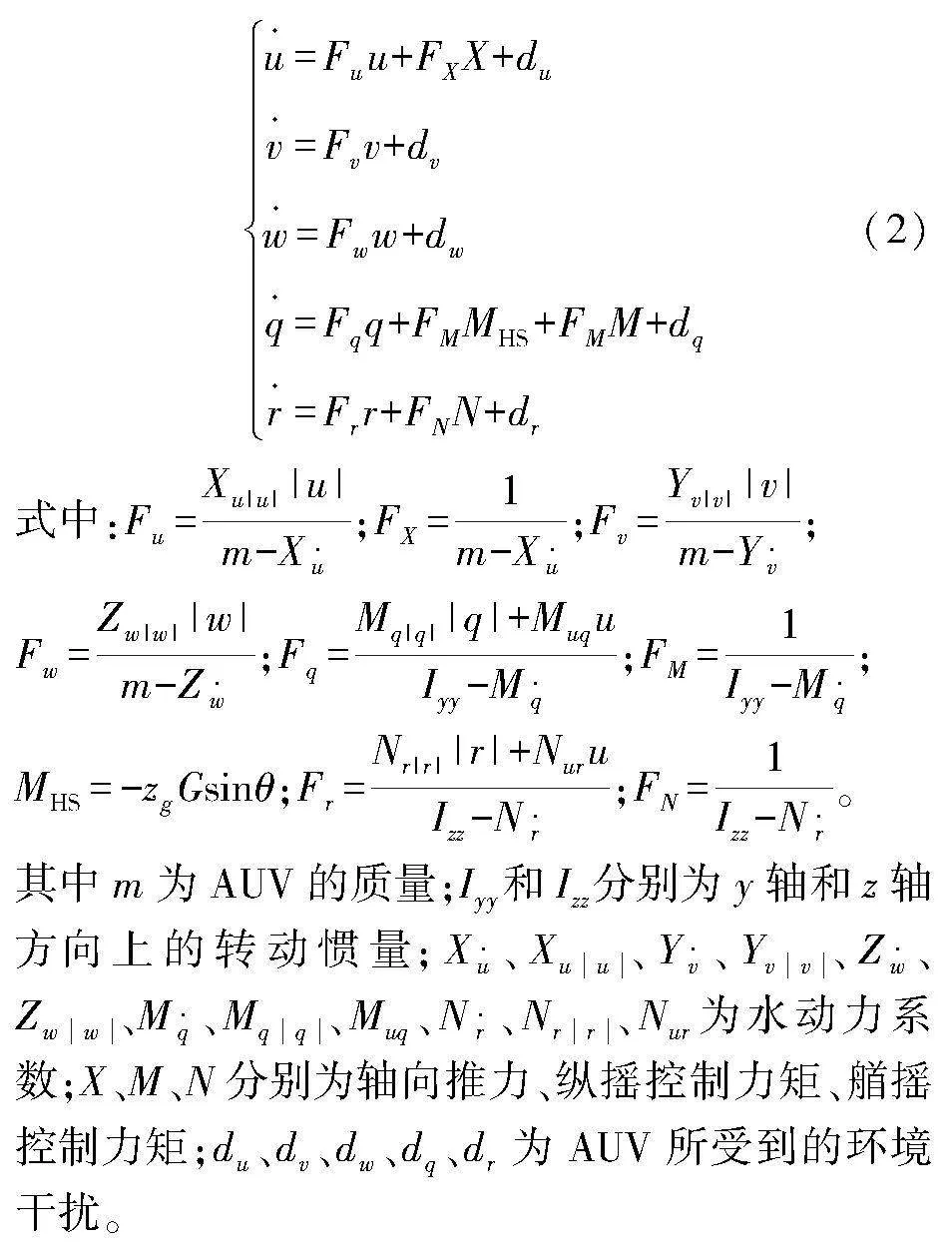
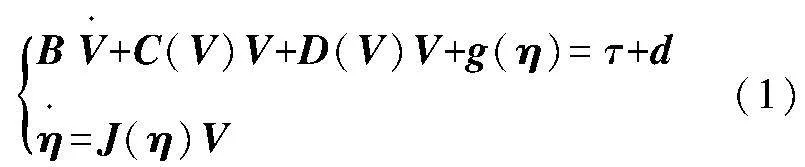
忽略AUV的横滚运动,建立欠驱动AUV五自由度运动学及动力学模型[11]:
式中:V=[uvwqr]T为定义在坐标系{B}中的速度向量和角速度向量,其中u为纵荡速度,v为横荡速度,w为垂荡速度,q为纵摇角速度,r为艏摇角速度;η=[xyzθψ]T是AUV定义在坐标系{I}中的位置向量和姿态向量,x、y、z为AUV位置向量;B代表质量及惯性矩阵;C(V)代表科氏向心力矩阵;D(V)代表流体阻尼矩阵;g(η)=[000MHS0]T为重力和浮力产生的恢复力矩向量;J(η)为坐标系{I}与坐标系{B}之间的转换矩阵;τ为AUV的驱动力和力矩;d为AUV所受到的外界干扰。将式(1)中的动力学模型展开可以得到:
2 干扰观测器的设计
定义状态变量x=x1x2x3x4x5T,其中:x1=u,x2=v,x3=w,x4=q,x5=r。
把状态方程(2)改写成向量形式:
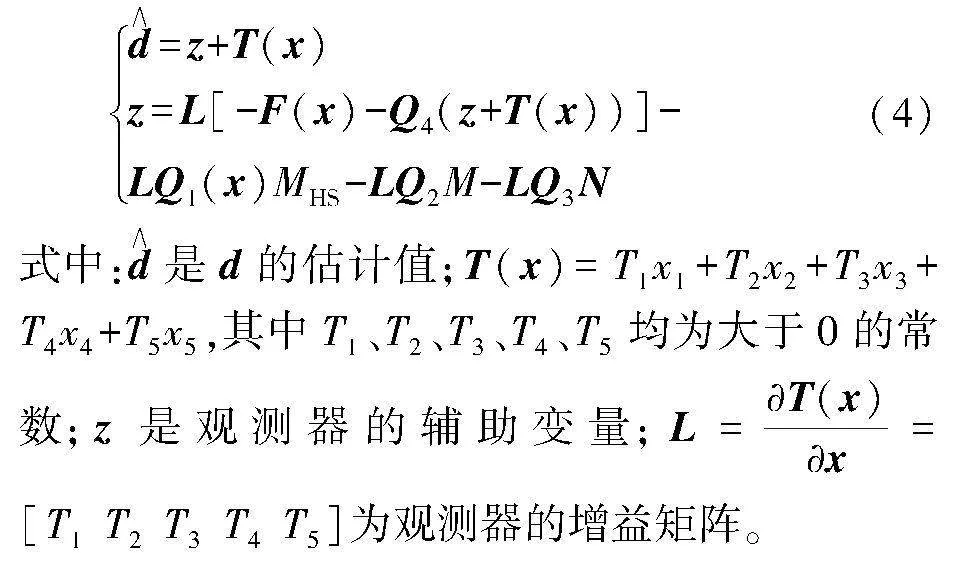
构造干扰观测器如下:
定义观测误差:
3 DOBSMC设计
3.1 三维路径跟踪误差模型
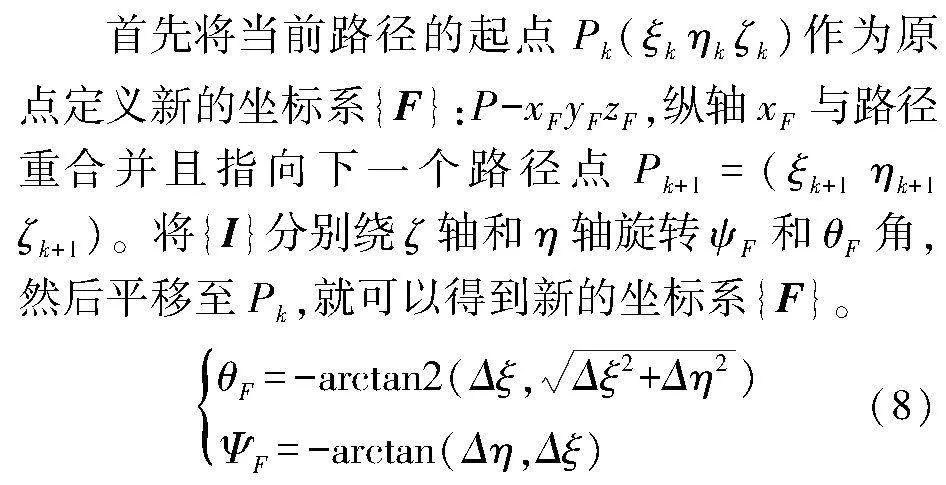
式中:Δξ=ξk+1-ξk;Δη=ηk+1-ηk;Δζ=ζk+1-ζk。
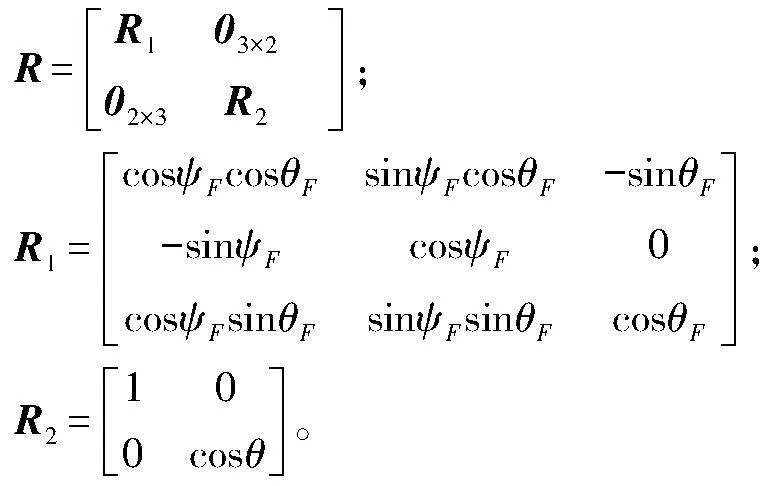
基于参考文献[12]得到跟踪误差模型:定义P0=[ξ0η0ζ0θψ]是O在坐标系{I}的位置和姿态,PP=[ξkηkζkθFψF]是P在坐标系{I}的位置和姿态。在坐标系{F}中的跟踪误差为:
Pe=[xeyezeθeψe]=R(P0-PP)
式中R是坐标系{I}到坐标系{F}的转换矩阵,
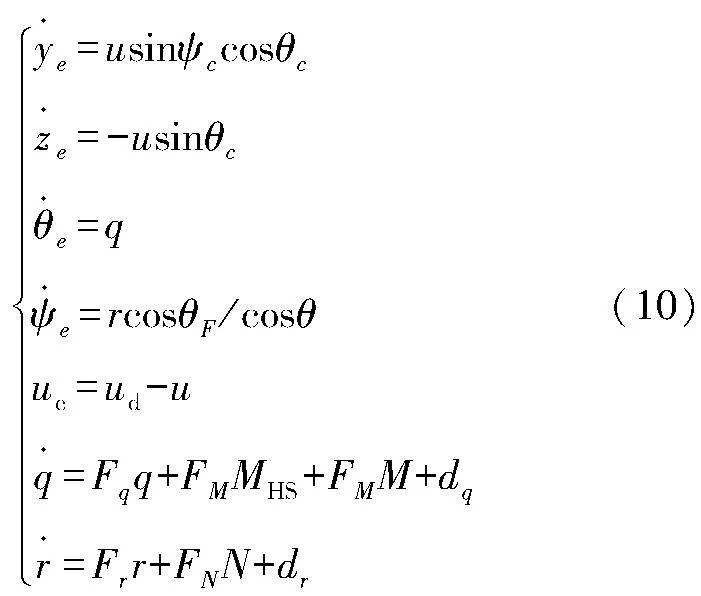
对跟踪误差Pe求导有:
3.2 三维路径跟踪控制器设计
因AUV无垂向力与横向力,故v与w很小,可忽略不计。又由于xe不需要进行控制,所以结合式(2)和式(9)得到以下欠驱动AUV镇定模型[13]:
式中:ud为期望纵荡速度;ue为纵荡速度误差。
取Lyapunov函数
对V1求导有
设计艏摇角误差期望值ψed和纵摇角误差期望值θed为
式中:k1gt;0;k2gt;0。
令ψe=ψed,θe=θed,可得
取Lyapunov函数
对V2求导可得
式中:k3gt;0;k4gt;0。
取滑模函数:
式中:c1gt;0;c2gt;0;c3gt;0。
取Lyapunov函数
对V3求导有
设计控制器为:
式中k5、k6、k7、k8、s1、s2、s3均大于0。
根据干扰观测器设计部分推导,干扰估计误差可以收敛到0,所以可以得到:
因此
4 仿真实验
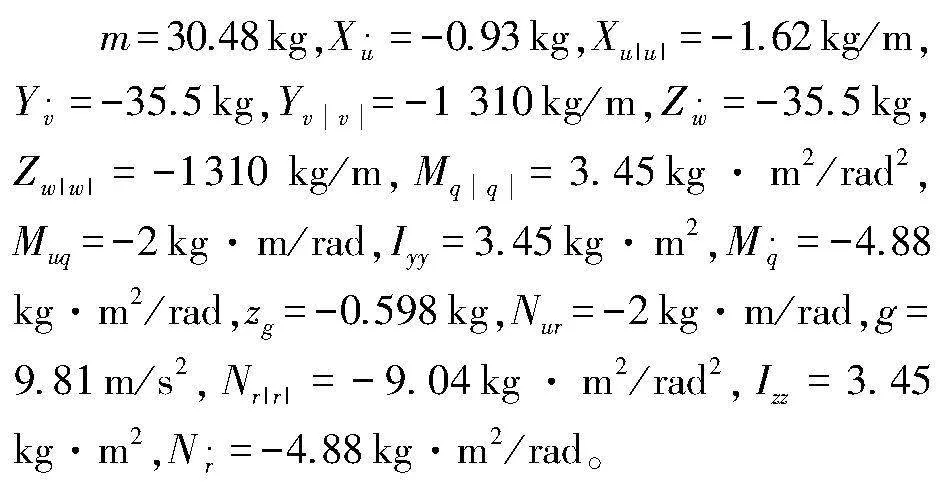
为验证本文所提出控制器的有效性,在Matlab2019a Simulink 中基于文献[14]中AUV模型进行数值仿真,具体参数如下:
干扰观测器参数选取为:T1=1,T2=0,T3=0,T4=1,T5=1。
期望纵荡速度ud为1m/s。
控制器参数选取为:
k1=0.2,k2=0.1,k3=1.0,k4=1.0,k5=10,c1=0.1,c2=0.1,c3=0.1,k6=1.0,k7=1.0,k8=10,ε1=0.1,ε2=0.1,ε3=0.1。
初始位姿向量:P0=(0000-0.5π)T。
所受外界干扰为:du=25,dv=dw=0,
dq=10sin(0.1t),dr=5sin(0.25t)+10。
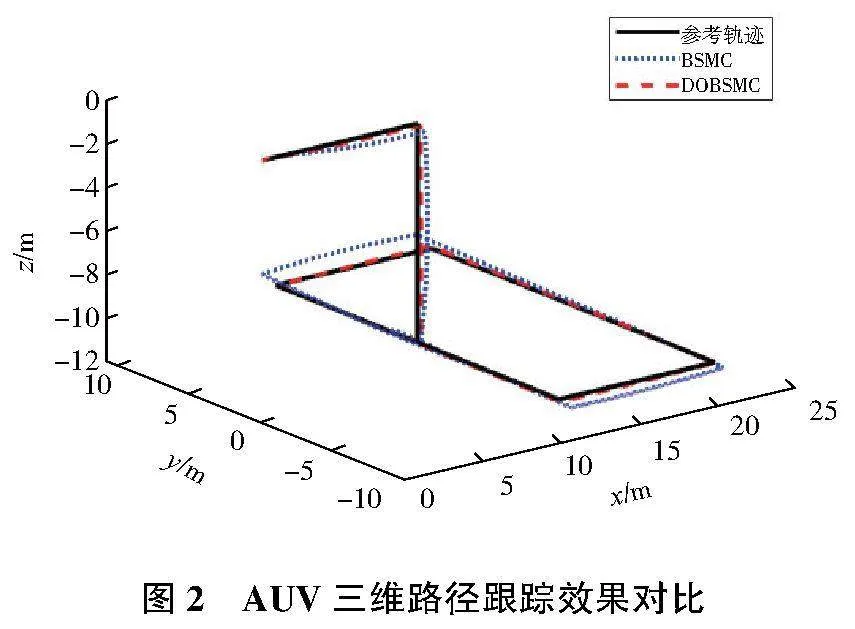
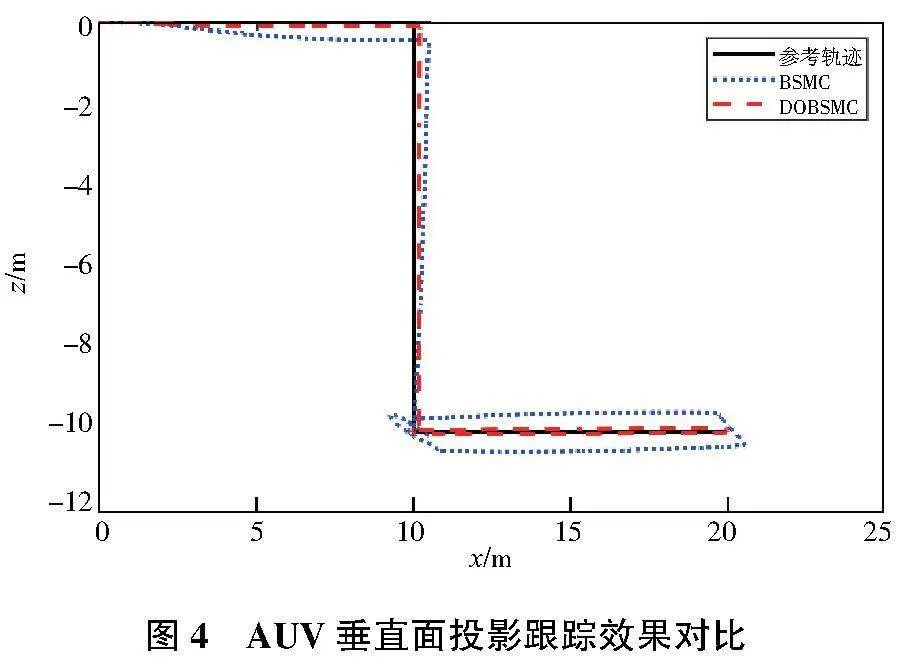
图2是采用传统反步滑模控制器(BSMC)与本文所设计的DOBSMC作用下的欠驱动AUV跟踪路径与期望路径的对比图。图3和图4是AUV三维路径分别在水平面投影与垂直面投影的跟踪效果对比。当要求AUV实现三维路径跟踪任务时,跟踪路径与期望路径越相近,说明跟踪效果越好。从图中明显可以看出,BSMC的跟踪路径与期望路径的偏差较大,而采用DOBSMC的跟踪效果较好。
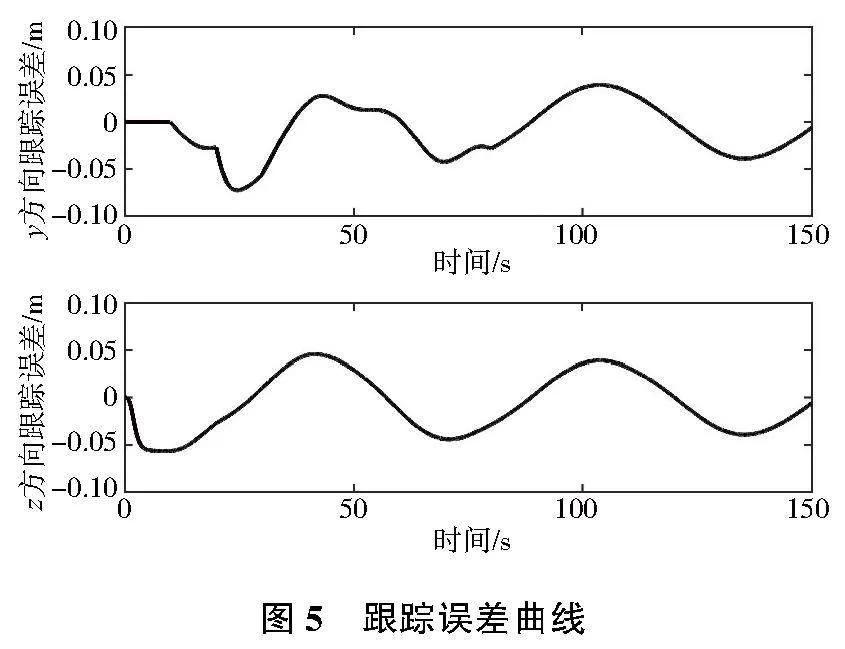
图5是DOBSMC作用下的y方向与z方向上的跟踪误差。从图中可以看出误差分别在25s、15s左右时达到了峰值0.075m、0.055m,之后误差均稳定在0.05m范围内。
图6为干扰实际值与干扰观测器得到的估计值对比曲线。由图可知,干扰观测器可以实现对外界干扰的估计。
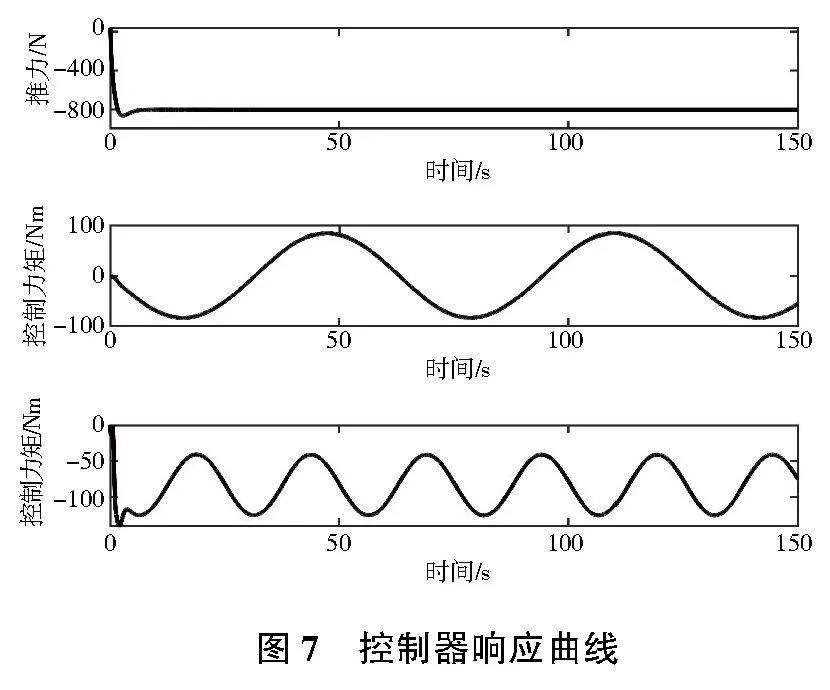
图7是轴向推力X、纵摇控制力矩M以及艏摇控制力矩N的响应曲线。
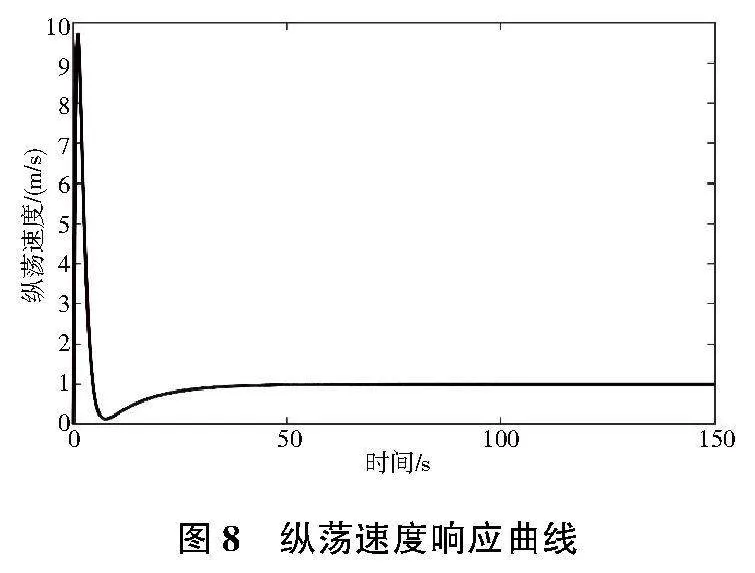
图8是纵荡速度u的响应曲线,通过对式(2)的分析,纵荡速度只与轴向推力X有关,轴向推力X直接决定了纵荡速度u的大小。仿真结果显示,当轴向推力X稳定在800N后,在其控制下纵荡速度u最终收敛到期望值1m/s。
5 结语
通过对欠驱动AUV的5自由度模型与跟踪误差模型的简化得到系统镇定模型,考虑AUV受到干扰影响,设计了DOBSMC。仿真得到了AUV跟踪的效果对比曲线以及位置跟踪误差曲线、干扰估计曲线、控制力矩和纵荡速度的响应曲线。结果表明该控制器能够提高AUV三维路径的跟踪精度,且能有效抑制外界干扰对系统性能造成的影响。
参考文献:
[1] 王鹏. 欠驱动自主水下航行器的航迹跟踪控制研究[D]. 秦皇岛:燕山大学,2021.
[2] 王芳,万磊,李晔,等. 欠驱动AUV的运动控制技术综述[J]. 中国造船,2010,51(2):227-241.
[3] 郭亦平,王益民,任元洲. 基于视线导引法的AUV轨迹跟踪控制技术研究[J]. 声学与电子工程,2018(4):32-36,40.
[4] 李广有,王娜,尹庆华. 欠驱动AUV基于干扰观测器的滑模控制[J]. 机械制造与自动化,2022,51(2):177-180.
[5] 王金强,王聪,魏英杰,等. 未知海流干扰下自主水下航行器位置跟踪控制策略研究[J]. 兵工学报,2019,40(3):588-591.
[6] YU C Y,XIANG X B. Vertical plane path following control of an under-actuated autonomous underwater vehicle[C]//2016 IEEE International Conference on Underwater System Technology:Theory and Applications (USYS). Penang,Malaysia:IEEE,2017:37-41.
[7] SUBUDHI B, MUKHERJEE K, GHOSH S. A static output feedback control design for path following of autonomous underwater vehicle in vertical plane[J]. Ocean Engineering,2013,63:72-76.
[8] 王宏健,陈子印,贾鹤鸣,等. 基于滤波反步法的欠驱动AUV三维路径跟踪控制[J]. 自动化学报,2015,41(3):631-645.
[9] LI Y, WEI C, WU Q, et al. Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle[J]. Ocean Engineering,2015,105:270-274.
[10] 周则兴. 基于DRNN-S控制的AUV三维轨迹跟踪方法[J]. 舰船科学技术,2021,43(21):96-99,178.
[11] 金鸿章,姚绪梁. 船舶控制原理[M]. 2版. 哈尔滨:哈尔滨工程大学出版社,2013.
[12] 姚绪梁,王晓伟,蒋晓刚,等. 海流干扰下的欠驱动AUV三维路径跟踪控制[J]. 哈尔滨工业大学学报,2019,51(3):37-45.
[13] 王晓伟,姚绪梁,夏志平,等. 欠驱动AUV三维直线路径跟踪控制[J]. 控制工程,2020,27(6):977-983.
[14] PRESTERO T . Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D]. [S.I.]:Massachusetts Institute of Technology, 2001.
