
基于TRIZ理论医药配送机器人的设计
2024-08-31 00:00:00桓源任工昌张冉洪杰
机械制造与自动化 2024年3期
关键词:TRIZ理论







摘 要:为解决现有医药配送机器人空间容量小、智能化程度低、配送过程药品防护不到位等问题,基于医院实际工况提出合理性解决方案。以TRIZ理论为基础,运用创新工具对配送机器人各部分进行创新设计,完成拖车式医药配送机器人结构设计和控制系统设计,并通过样机验证了方案的可行性。所设计的医药配送机器人在拖车式结构和立式循环车厢配合下极大地提高了容积,采用机械臂实现药品的取放,大大提高了智能化程度,自适应底盘的设计增加了对药品的防护性。该机器人运行过程不需要人为介入即可稳定、可靠地完成整个药品配送过程,有效解决了现有药品的配送难题,具有广阔的推广运用价值。
关键词:TRIZ理论;药品配送;拖车式机器人;循环车厢
中图分类号:TH122; TP242文献标志码:A文章编号:1671-5276(2024)03-0199-05
Design of Medicine Distribution Robot Based on TRIZ Theory
Abstract:In order to solve the problems of small space capacity, low degree of intelligence, and inadequate drug protection during the distribution process of the existing medical distribution robots, a reasonable solution is proposed based on the actual working conditions of the hospital. On the basis of TRIZ theory, innovative tools are used to innovatively design all parts of the distribution robot, complete the structural design and control system design of the trailer-type medical distribution robot, and the feasibility of the scheme is verified through prototype. The designed medicine distribution robot greatly increases the volume under the cooperation of the trailer structure and the vertical circulation carriage. The taking of medicines by means of robotic arm greatly improves the degree of intelligence, and the design of the adaptive chassis enhances the protection of medicines. The robot can complete the entire drug distribution process stably and reliably with no human intervention in the running process, which effectively solves the problem of existing drug distribution, and has broad promotion and application value.
Keywords:TRIZ theory; drug delivery; trailer-mounted robots; circulating carriages
0 引言
近年来因为疫情等因素的影响导致医疗服务的需求逐年增加,医护人员缺口日益显著。由于病毒的高传染性和高隐蔽性导致医护人员在配送药物时需要多层防护,其过程繁琐且存在感染风险,医护人员工作强度和压力巨大。随着近年来机器人技术的高速发展,各领域积极结合机器人技术打造智能化产业[1],国内外众多学者对医药配送机器人做了深入研究[2]。从TRC公司研制的第一款名为“Helpmate”的医药配送机器人[3]到中国海洋大学研制的“海乐福”医用机器人[4],机器人正代替医护人员完成医疗设备、药品以及食物等配送工作[5-6]。目前,医药配送机器人的研究热点主要集中在机器人的导航定位等控制技术[7-8]。想要机器人更高效可靠配送药品,不仅要提升机器人导航定位能力和配送速度,更应该改进机器人自身容积和提升药品配送过程中的防护措施。因此,利用TRIZ理论对医药配送机器人的方案进行合理设计,扩展配送机器人的有效容积,增加药品配送过程中的防护,提高机器人的智能化程度,对配送机器人的进一步发展具有积极意义。
1 TRIZ理论
TRIZ理论是前苏联发明家阿奇舒勒等研究人员在分析研究世界各国250万件高价值专利后所提出的一种发明问题解决原理[9-10]。本文对医药配送机器人的设计主要采用了TRIZ理论中的物-场模型、技术关键和发明原理等内容,根据标准解和发明原理的启发,结合专业知识对医药配送机器人进行了创新设计。
2 基于TRIZ理论的方案分析
2.1 系统的“物-场”模型构建
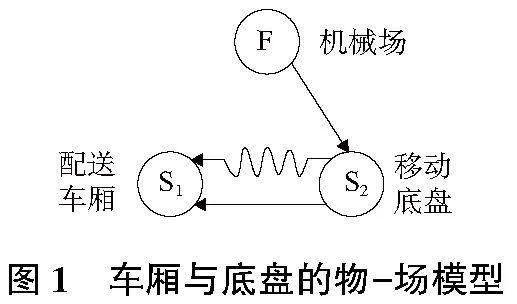
现有单车体医药配送机器人通过移动底盘对配送车厢起到支撑和驱动作用。考虑到医药配送机器人在运动过程中需要实现动态避障和路径规划等复杂功能,使得移动底盘需要占据较大空间,对配送车厢的容积产生了不利影响,两者之间的物-场模型如图1所示。F为移动底盘和配送车厢之间的机械场,S1为配送车厢,S2为移动底盘。
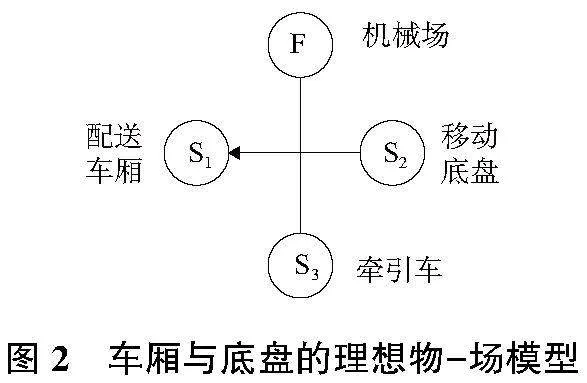
消除移动底盘和配送车厢之间不利因素的关键是不占用配送车厢空间的同时实现驱动导航等功能。通过物-场模型分析后发现,可通过引入外部物质消除不利因素。将移动底盘的支撑和驱动导航等功能分离,引入新物质S3(牵引车)来实现驱动导航等复杂功能,仅保留移动底盘的支撑功能。根据图2所示的物-场模型标准解可设计出一种拖车式医药配送机器人,在保证足够储药空间的同时,可根据需要增加配送车厢的数量,极大地提高了配送效率。
2.2 医药配送机器人系统矛盾分析
经过调查发现,现有配送机器人只能实现简单的运送功能,在物品存取阶段仍需人为介入。为进一步完善机器人的各项功能,提高配送机器人的智能化程度,不仅需要解决物品存取过程中的自动化问题,还应结合拖车式结构进一步优化配送车厢。在调研中还发现,医院的楼栋连接处会存在部分斜坡路面,由于配送药品中会有液体存在,所以机器人在各类路面上行驶时应该保证收纳盒中药品的平稳性和安全性。
基于上述分析,结合TRIZ理论的标准工程参数得出系统技术关键。在解决机器人物品存取过程中自动化问题时,需要引入复杂物品输送、存取结构,使得整个装置复杂性大大提高,即改善参数为自动化程度,恶化参数为装置复杂性。通过增加储存车厢容量提高单次药品配送数量是提高配送效率的有效方式。但增加单次药品配送数量会使整个储存车厢体积变大,即改善参数为物质或事物的数量,恶化参数为运动物体的体积。为提高配送过程中药品的稳定和安全性,使配送机器人可适应各类倾斜路面,就需要加入复杂的悬挂结构等,即改善参数为适应性和多用性,恶化参数为装置复杂性。根据改善和恶化参数,结合表1中矛盾矩阵可得到解决工程问题的发明原理。
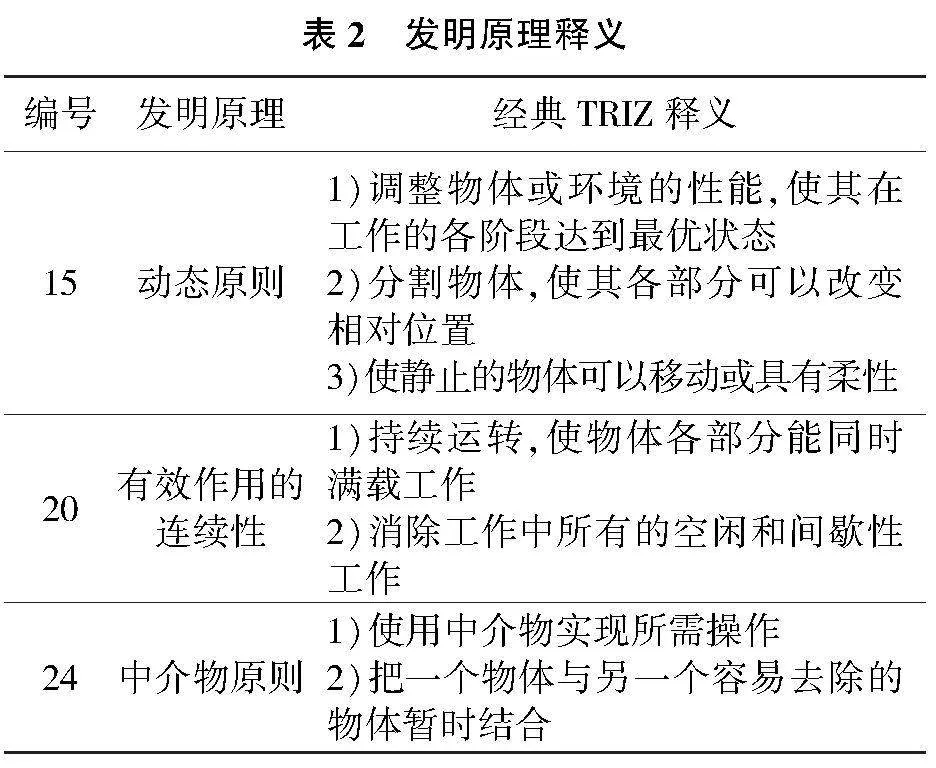
利用矛盾矩阵所列出的发明原理,结合设计需求和经验,对各个发明原理进行分析筛选,最后优选出15号(动态原则)、20号(有效作用的连续性)和24号(中介物原则)发明原理作为医药配送机器人创新设计的指导思路,各个发明原理细则如表2所示。
3 医药配送机器人的结构设计
3.1 整体方案设计
根据物-场模型标准解、15号、20号和24号发明原理的指导,对医药配送机器人进行创新设计。
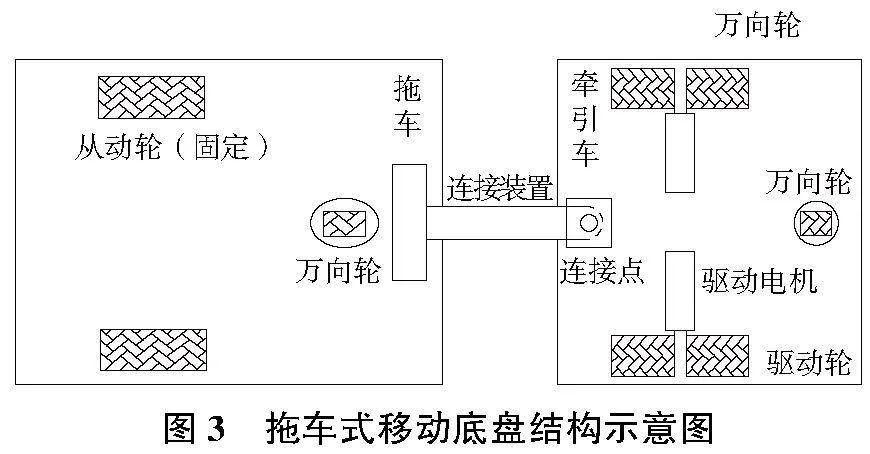
根据前文分析,在物-场模型标准解的启发下,将机器人整体设计为拖车式结构。拖车式底盘结构简图如图3所示。牵引车为两轮差速式驱动,配送车厢底盘通过连接装置与牵引车连接,拖车式结构不仅使得机器人运行更加灵活,还可根据需要改变配送车厢数量。
医药配送机器人整体结构如图4所示。由牵引车提供动力,通过激光雷达和摄像头构建地图模型并实现导航避障功能;位于牵引车上部的显示屏可实时显示机器人的运行信息和需配送药品的患者信息,便于患者确定药品,提高配送的准确性。在配送药品时,通过机械臂抓取药品放置于立式循环车厢的收纳盒中,待药品配送至患者病床边后,利用循环车厢将对应药品运送至最高点,上盖打开通过机械臂将药品抓取放置患者床边,完成配送过程[11]。
为防止药品倾倒,提高机器人的道路适应能力,保证机器人在斜坡路段运行过程中使循环车厢保持水平状态,运用15号发明原理,将立式循环车厢支架与底盘分离,设计为如图5所示的自适应性底盘结构。在底盘支架下端安装万向轮保证牵引车带动时运行的灵活性,在支架之间设置弧形导轨,通过滚轮配合支撑循环车厢支架。在机器人运行至斜坡路段时,底盘支架由于地形作用发生倾斜,在重力作用下滚轮会沿弧形导轨滑动,使上端循环支架保持水平,进而防止收纳盒中的药品倾倒。
3.3 机械手及收纳盒设计
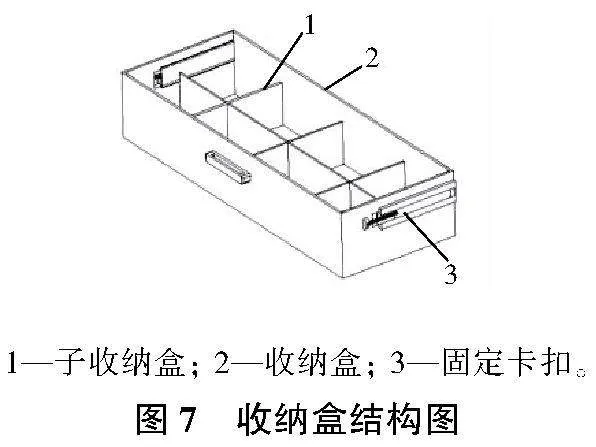
为实现机器人的自主存取功能,运用24号发明原理引入如图6所示的机械手来完成药品的存取,可使机器人自动化程度大大提高。在具体实施阶段发现,虽然引入机械手可实现药品的存取,但药品具有多种包装形式,不同药品抓取时需要机械手识别药品并根据药品包装调节机械手抓取位姿,大大增加了机械手的控制难度。所以再次运用24号发明原理引入如图7所示的子收纳盒。由于子收纳盒形状规整统一,在护士将需要配送的药品有序放入子收纳盒后,机械手直接抓取子收纳盒存取即可,使机械手抓取时难度大大降低。
3.4 立式循环车厢设计
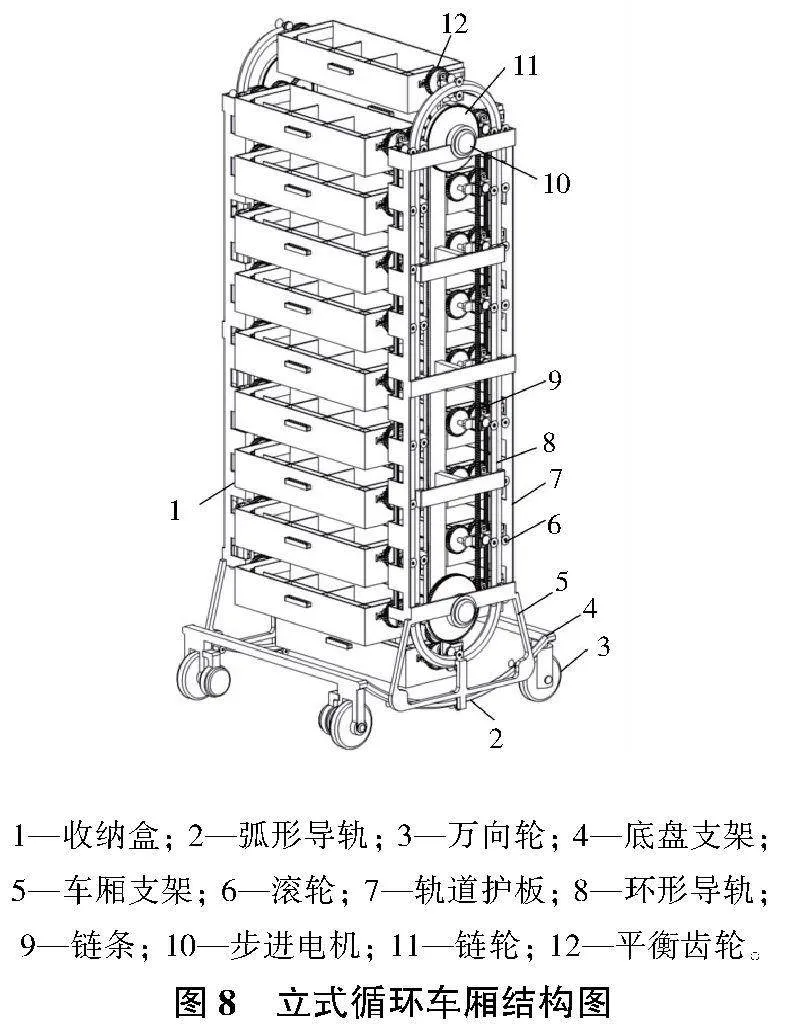
利用机械臂实现存取功能提高了机器人的自动化程度,但传统框架式存储车厢需要较大空间来满足机械臂筛选不同收纳盒的需求。为保证有效提高储存空间减小机械臂的运行空间,运用20号发明原理采用如图8所示的立式循环车厢结构。在存取药品时,通过步进电机和链传动机构配合驱动收纳盒沿环形轨道运动,在平衡齿轮的作用下保证收纳盒始终处于水平状态,当对应收纳盒运动至最高点后停止,上盖打开机械臂存取药品。由于机械臂在存取药品时,对应收纳盒均可通过立式循环机构送至最高点,所以机械臂的工作空间小,识别和定位收纳盒中药品难度低。整个立式循环车厢结构紧凑,空间容量大,可有效提高配送效率。
4 机器人控制系统设计
4.1 软件控制系统设计
机器人软件控制系统如图9所示,分为3层,分别是系统操作层、驱动层和硬件层[12]。操作层是机器人控制系统的控制核心,采用MiniPC主机与远程PC从机组成的分布式ROS控制系统将各个功能模块集成,用于机器人的上层决策。驱动层通过下位机预处理传感器收集相关数据信息。硬件层根据系统操作层发出的指令,完成对机器人的驱动。
4.2 硬件控制系统设计
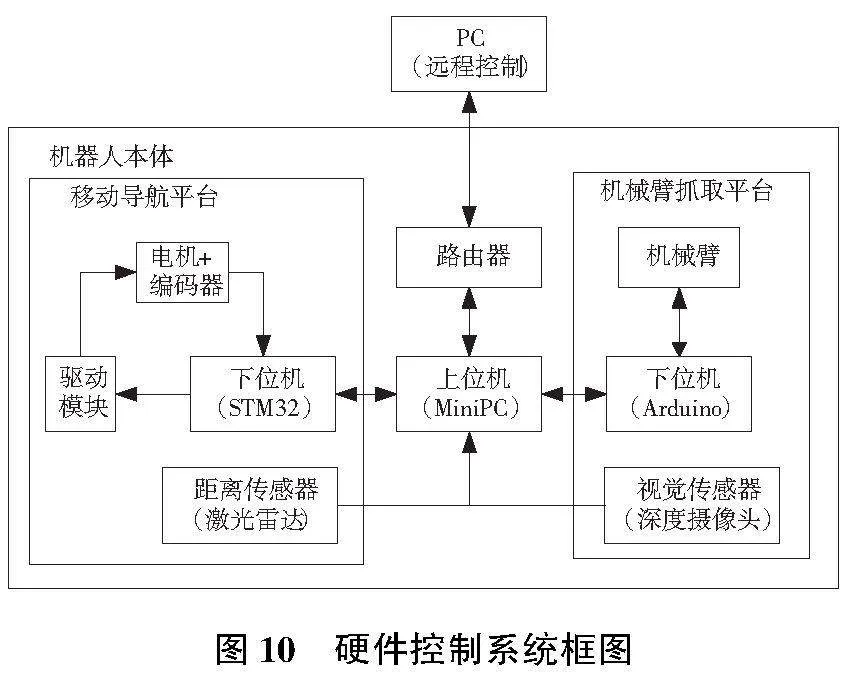
机器人硬件控制系统如图10所示,采用上/下位机的结构实现。以MiniPC作为上位机控制器实现上层规划与控制,以STM32作为移动导航平台及循环车厢的下位机控制器、Arduino作为机械臂抓取平台的下位机实现对机械臂舵机的控制。移动导航平台由驱动模块、电源模块、上/下位机控制器、带编码器装置的电机以及激光雷达等组成。编码器实现对机器人的测速,下位机完成底盘的里程计算,采用串口实现上/下位机间的通信,利用激光雷达采集周围环境数据结合SLAM算法完成机器人的自主导航功能。机械臂主要由本体、控制器和摄像头组成,通过摄像头对待抓物品进行识别与定位,上位机控制机械臂的运动实现自主抓取功能。
5 设计计算与样机实验
5.1 循环车厢设计计算
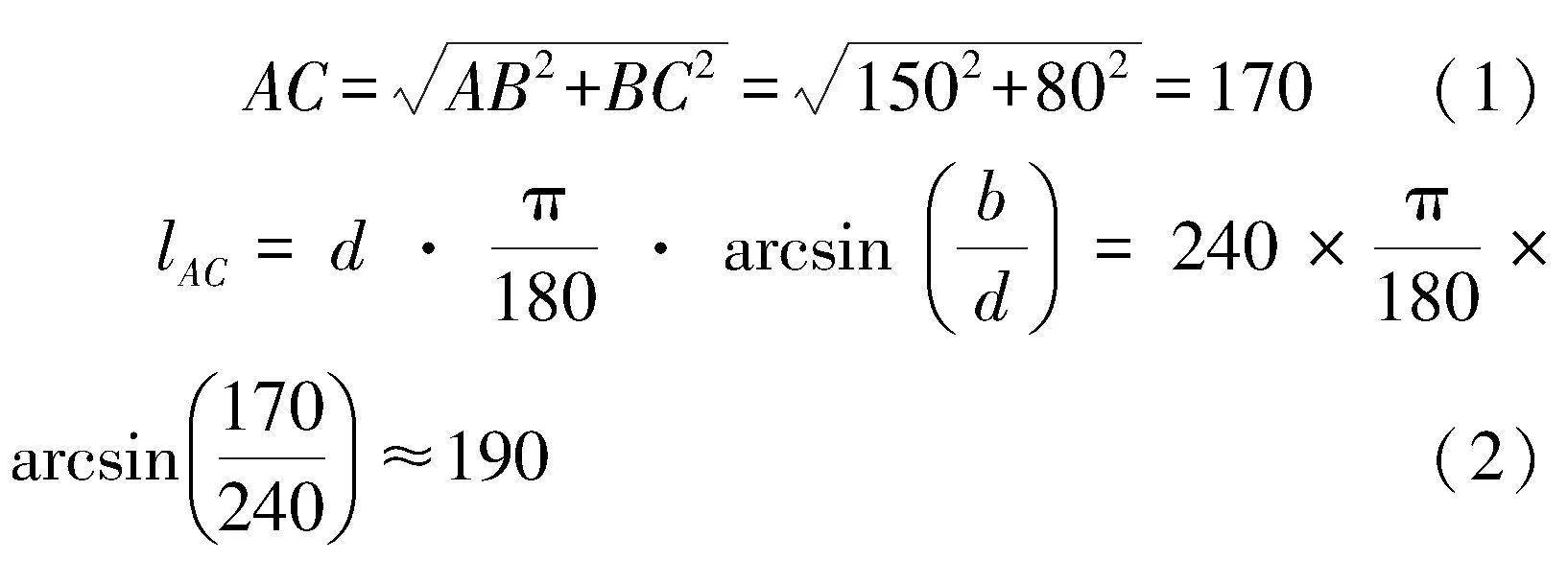
对循环车厢中收纳盒进行合理布局是提升机器人存储空间的关键。根据对各类药品尺寸的调研分析,将收纳盒尺寸设计为400mm×150mm×80mm,循环导轨的宽度为240mm。考虑到在收纳盒运动至最高点时,若两收纳盒之间距离太近会发生干涉,距离太远又会浪费配送车厢空间。图11所示为两收纳盒发生干涉的临界状态,保证两收纳盒安装距离大于弧长lAC(单位:mm)即可。其计算过程如下:
式中:lAC为弧长;d为直径;b为弦长。
现有大多数药品包装高度小于200mm,综合考虑两收纳盒之间的安装距离,设计为200mm即可满足使用要求。
5.2 样机制作与实验
根据设计方案制作拖车式医药配送机器人1∶1实验样机如图12所示。在牵引车后端增加单个立式循环车厢和整个配送过程不需要人为介入的情况下,该样机可自主完成药品的配送过程。整个实验过程机器人运行平稳可靠,为后续对机器人的进一步研制提供了实验基础。
6 结语
本文针对现有医药配送机器人存在的不足,运用TRIZ理论中的创新工具对医药配送机器人各部分进行了创新设计并制作了样机完成配送实验。实验结果表明,该机器人能够实现医用不同场景下对药品、食品的配送,缓解了医院内医护人员的工作强度及压力,提高了医院的智能化水平和药品配送效率,推动了护理领域生活性服务业创新,改进了服务流程,实现了智能化、自动化、无人化,具有重要的工程实践意义和广阔的发展前景。
参考文献:
[1] 王开放,曹慧,邢蒙蒙,等. 康复外骨骼机器人在肢体康复中的应用进展[J]. 机械传动,2022,46(4):10-21.
[2] 刘京运. 聚焦上海防疫一线,看机器人如何击退疫情 “倒春寒”[J]. 机器人产业,2022(3):20-23.
[3] BAUER J C. Service robots in health care:the evolution of mechanical solutions to human resource problems[J]. Technology Early Warning System-White Paper,2003,32(1):1-10.
[4] 李飞. 护士助手机器人系统设计[D]. 哈尔滨:哈尔滨工程大学,2017.
[5] 佚名. 新松展示协作机器人和智能移动搬运平台[J]. 物流技术与应用,2018(9):137.
[6] 邓漪蒙. 钛米机器人:摘下“金字塔上的皇冠”[J]. 浦东开发,2017(6):20-21.
[7] 张桀,沈重. 联合TDOA改进算法和卡尔曼滤波的UWB室内定位研究[J]. 现代电子技术,2016,39(13):1-5.
[8] 苗俊,尤志鹏,袁齐坤,等. 智能巡检机器人研究现状与发展[J]. 设备管理与维修,2019(24):99-100.
[9] 任工昌,田川,王晨,等. 基于TRIZ的可重构夹具创新设计研究[J]. 组合机床与自动化加工技术,2016(3):131-134.
[10] 桓源,栾飞.基于TRIZ理论的苹果分拣套袋装置的设计[J].机械设计,2021,38(增刊2):104-107.
[11] 任工昌,桓源. 一种多功能智能配送机器人:中国,CN111267127B[P]. 2021-04-13.
[12] 刘小军,温宏愿,周军,等. 基于ROS的消毒机器人控制系统设计与实现[J]. 机床与液压,2021,49(11):17-21.
猜你喜欢
价值工程(2017年6期)2017-03-15 17:25:29
教育教学论坛(2017年5期)2017-03-06 21:29:39
科技创新与应用(2017年3期)2017-02-18 15:19:51
科技创新与品牌(2017年1期)2017-02-17 16:54:26
中国科技博览(2016年27期)2017-01-23 03:21:54
科技创新与品牌(2016年12期)2017-01-17 17:08:38
中国市场(2016年41期)2016-11-28 05:55:32
中国市场(2016年38期)2016-11-15 23:29:58
中国市场(2016年15期)2016-04-28 09:05:31
科技视界(2016年4期)2016-02-22 20:27:41
