
Stewart型并联机器人的奇异对其运动精度的影响
2024-08-31 00:00:00陈垚尤晶晶叶鹏达王澍声黄宁宁
机械制造与自动化 2024年3期







摘 要:以9-3 Stewart型并联机器人为研究对象,分析其在机构接近奇异位形时动平台运动精度的情况。通过计算并联机器人速度Jacobian矩阵的行列式得到奇异点的坐标。通过虚拟样机实验,得到动平台参考点位置反解和正解计算的相对误差。用转动Jacobian矩阵条件数的倒数来度量机构接近奇异的程度,并分析该程度与上述相对误差之间的映射关系。研究结果表明:当指标值大于7.027×10-5时,正、反解的相对误差可忽略不计,这为奇异规避、路径规划等后续工作提供了理论参考。
关键词:并联机器人;正解;反解;运动精度;奇异位形;Jacobian矩阵
中图分类号:TH122; TP242文献标志码:A文章编号:1671-5276(2024)03-0195-04
Effect of Singularity on Motion Accuracy of Stewart Parallel Robot
Abstract:Taking 9-3 Stewart parallel robot as the research object, analyzes the motion accuracy of moving platform when mechanism is close to singular configuration. The determinant of velocity Jacobian matrix of the parallel robot is calculated to abtain the coordinates of singular points. The virtual prototype experiment is conducted to gain the relative error of the inverse solution and positive solution of the reference point of the moving platform. The reciprocal of the condition number of the rotating Jacobian matrix is used to measure the degree of the mechanism approaching singularity, and the mapping relationship between this degree and the above relative error is analyzed. The results show that when the index value is greater than 7.027×10-5, the relative error of the positive and negative solutions can be ignored, which provides a theoretical reference for the follow-up work such as singularity avoidance and path planning.
Keywords:parallel robot; positive solution; inverse solution; motion accuracy; singular configuration; Jacobian matrix
0 引言
机器人可以从构型上划分成串联机器人和并联机器人两种。与传统的串联机器人相比,并联机器人具有输出精度高、承载能力强、累积误差小、结构紧凑等优点[1]。所以,并联机器人被广泛地应用于需要高精度的工业生产中,比如军事领域中的潜艇、坦克驾驶运动模拟器;食品、电子、化工、包装等行业的分拣、搬运、装箱等。在现有的6自由度并联机器人中,最成功和最具代表性的是Gough-Stewart平台,其移动平台是通过6个结构相同的支链连接到固定底座,形成闭环架构[2]。由于人们追求并联机构尽可能地满足更多需求,具有更好的性能,Stewart型并联机器人应运而生。对于Stewart型并联机器人来说,安装在动平台上的球副在空间上是任意排列的,不一定是共面的,而且支链的数量也允许多于6个[3]。鉴于这些几何特征,Stewart型并联机器人在工业上的应用将比传统的Gough-Stewart平台更广泛。
国内外关于并联机器人的研究主要集中在机构学、运动学、动力学和控制策略等方面,其中奇异位形是衡量并联机器人运动性能的一个重要指标[4]。奇异位形是当机构运动进入某种临界状态时所具有的特定位形,是并联机器人的一项重要运动学特性。在这种临界状态下,机构的实际自由度数不再与其理论自由度数相等[5]。自由度为6的并联机构的奇点轨迹是一个6维超曲面,无法用图形表示。当奇异点出现在工作空间内部或它的边界时,一个并联机构就不能被完全控制,而且它的性能会变得较差,比如静刚度会显著降低。在实际应用中,并联机构会被限制在一个无奇异点的子空间中。因此,对并联机构的奇异性进行分析具有重要意义。
GOSSELIN等[6]首先根据末端执行器和驱动器的速度关系式提出了3种类型的奇异位形。HAO、MERLET和COLLINS等[7-9]分别采用线丛原理和Clifford代数对奇异位形存在的条件进行了研究。李虹等[10]通过3-RRP平面并联机构的运动学方程求解机构Jacobian矩阵,分析该机构的奇异位形。仇鑫等[11]以一种可重构Stewart型并联机器人为研究对象,对其奇异特性进行了理论分析。孙占朋等[12]研究自由漂浮空间机器人回避奇异的路径规划问题,使得空间机器人在运行过程中能够有效地解决反解问题。
为进一步减少或消除奇异性的影响、扩大并联机器人的实用化和产品化规模,本文以9-3(其中9、3分别表示静平台、动平台上球副的数量)Stewart型并联机器人为研究对象,分析其奇异特性对运动精度的影响,研究结果将对后续奇异位形的规避以及路径规划等工作具有指导意义。
1 奇异点计算及虚拟样机实验
1.1 计算奇异点
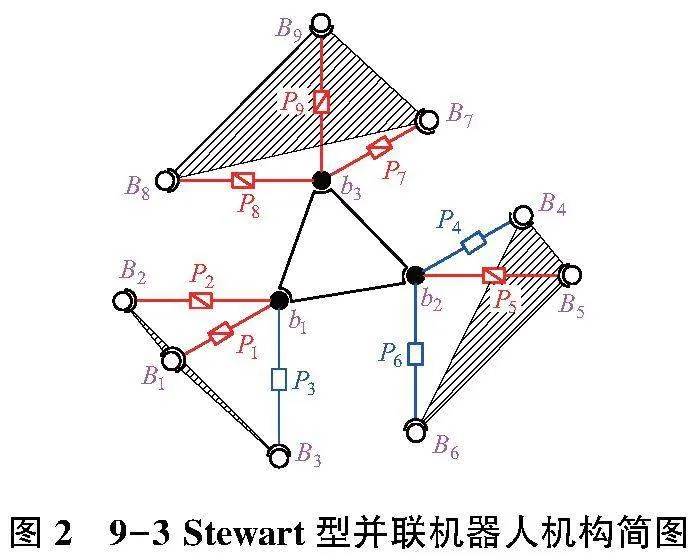
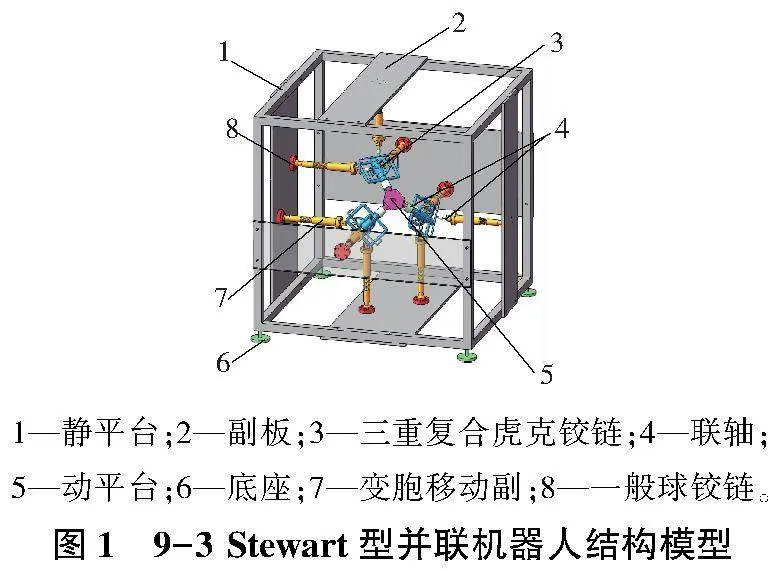
9-3 Stewart型并联机器人由1个动平台、1个静平台以及9条具有完全相同结构的支链组成。其中,每条支链都是由1个一般球面副、1个复合虎克铰链和1个移动副组成。
其结构模型和机构简图分别如图1、图2所示。当其Jacobian矩阵的行列式等于0时,机构发生奇异。
在动平台上任选一点P为参考点,基于速度基点法,每条支链的速度可以表示为
vbj=vp+ωp×(boj-po) (j=1,2,3)(1)
式中:vp和ωp分别表示点P的线速度和动平台的角速度;boj、po分别表示动平台上的点bj和点P的位置矢量。
将上式的等号两端同时点乘支链的单位方向向量,整理后可得第i条支链的速度为
ii=vbj·hi=hTi·vp+[(boj-po)·hi]×ωp(2)
式中hi表示支链i的单位方向向量。
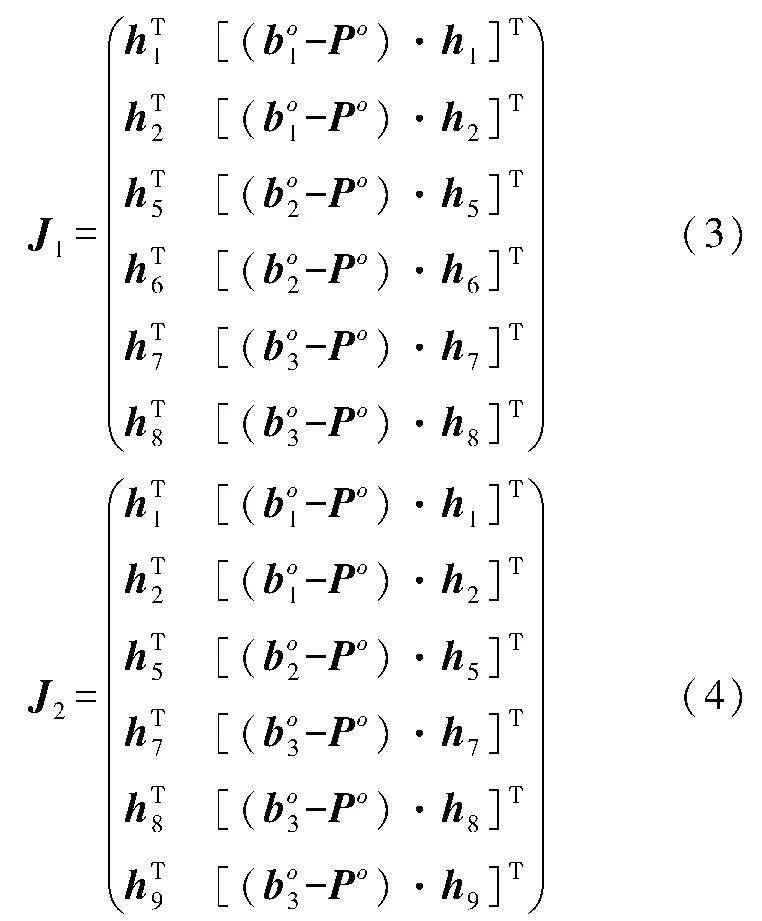
根据移动副的工作模式,9-3 Stewart并联机器人可以重构为 3-2-1构型和2-2-2构型,前、中、后3个数字各代表一条混合单开链支路中驱动副的个数。可以得到2-2-2和3-2-1构型并联机构的速度Jacobian矩阵J1、J2分别为:
基于式(3)和式(4),计算速度Jacobian矩阵行列式为0时P点的坐标,所求出的坐标即为相应构型的奇异点的坐标。由此可得到:
1) 当9-3 Stewart型并联机器人为2-2-2构型时所求得的奇异点坐标为
2) 当9-3 Stewart型并联机器人为3-2-1构型时所求得的奇异点坐标为
考虑到速度Jacobian矩阵量纲不统一会导致其条件数无意义,令J-1=G,则
式中:G1为移动Jacobian矩阵;G2为转动Jacobian矩阵。G1与参考点的选取有关,而G2与参考点的选取无关,本文仅考虑后者。
1.2 虚拟样机实验
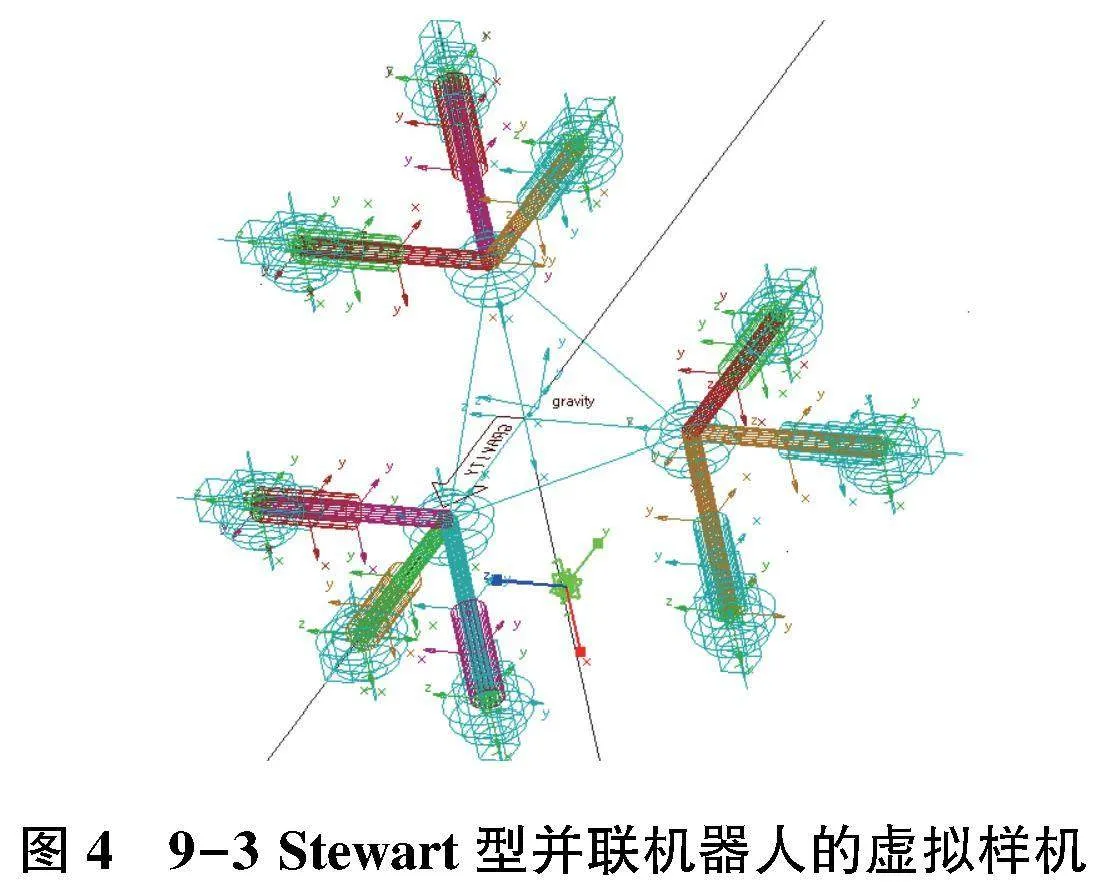
在ADAMS软件中建立机器人的虚拟样机并进行运动学仿真,流程图如图3所示。
第一步:在模型上创建点,其坐标为前文计算出的6个奇异点坐标,如图4所示。
第二步:驱动动平台,确定移动副驱动量。
1)选定P点为动平台参考点,建立该点到奇异点的移动副。
2)创建P点上的一般点驱动。
3)将时间设置成1s,步数设置成500步,进行模拟仿真。整个仿真的过程就是动平台从初始位置向奇异点方向运动再返回的过程。
4)仿真结束后,将此时P点的坐标导出。
5)基于B1—B9点的坐标和b1、b2、b3点的坐标,确定移动副驱动量。
第三步:驱动支链。
①在ADAMS软件中导入2-2-2驱动模式和3-2-1驱动模式下移动副随时间变化的数据。
②在驱动支链上建立平移驱动。
③设定仿真时间为1s,步数为500步。
④导出仿真停止时P点的坐标,作为动平台参考点的仿真值数据。
2 数据处理与分析
2.1 数据的处理
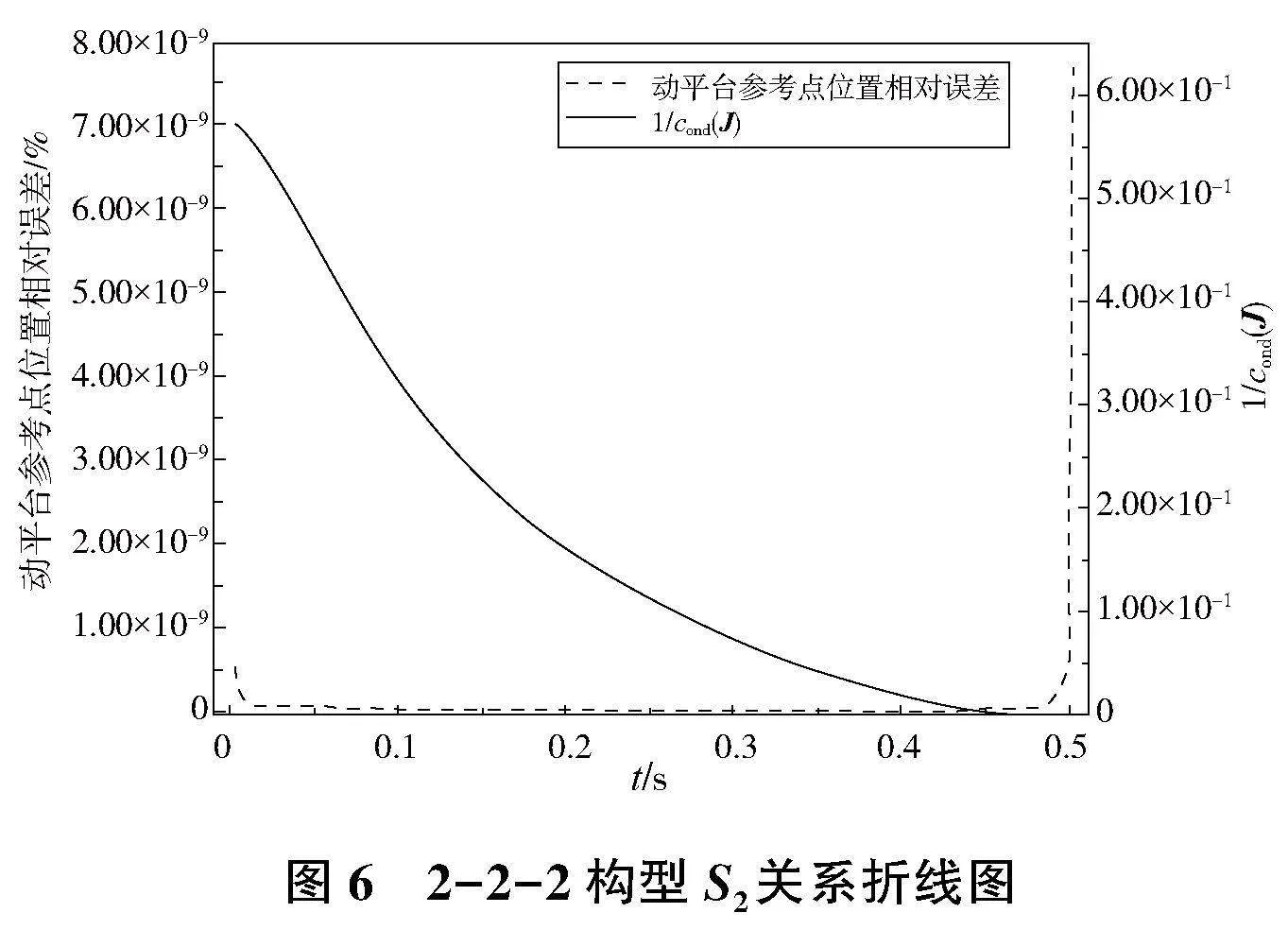
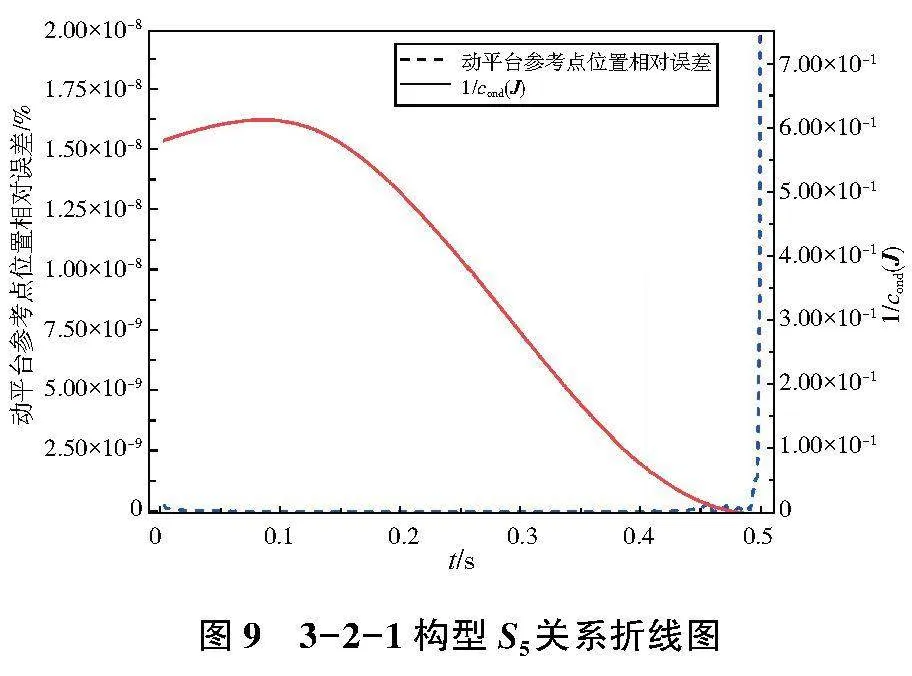
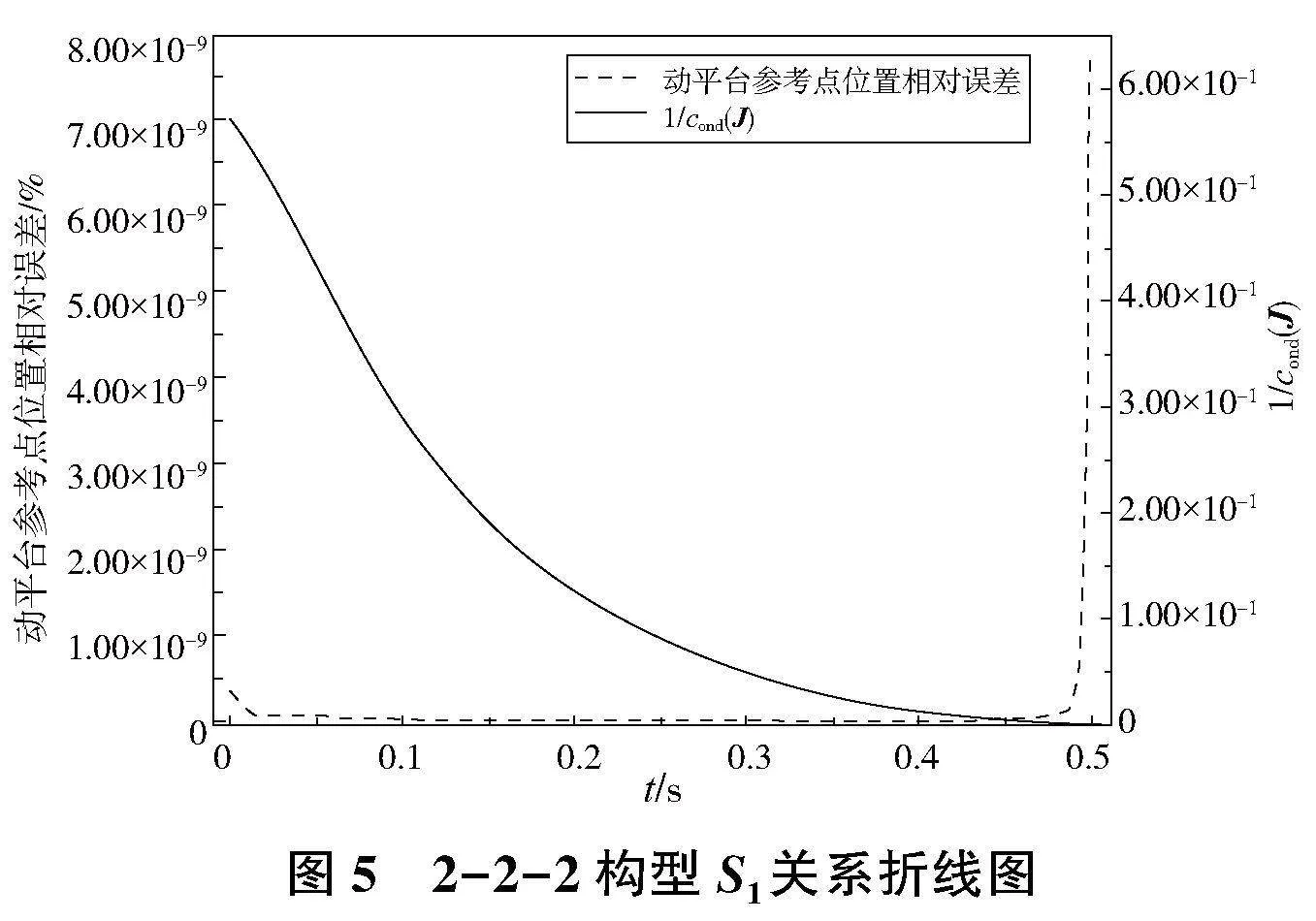
计算P点准确值和仿真值3个分量的相对误差并求平均值,用转动Jacobian矩阵条件数的倒数来度量机构接近奇异的程度,得到的数据曲线如图5—图10所示。
2.2 数据的分析
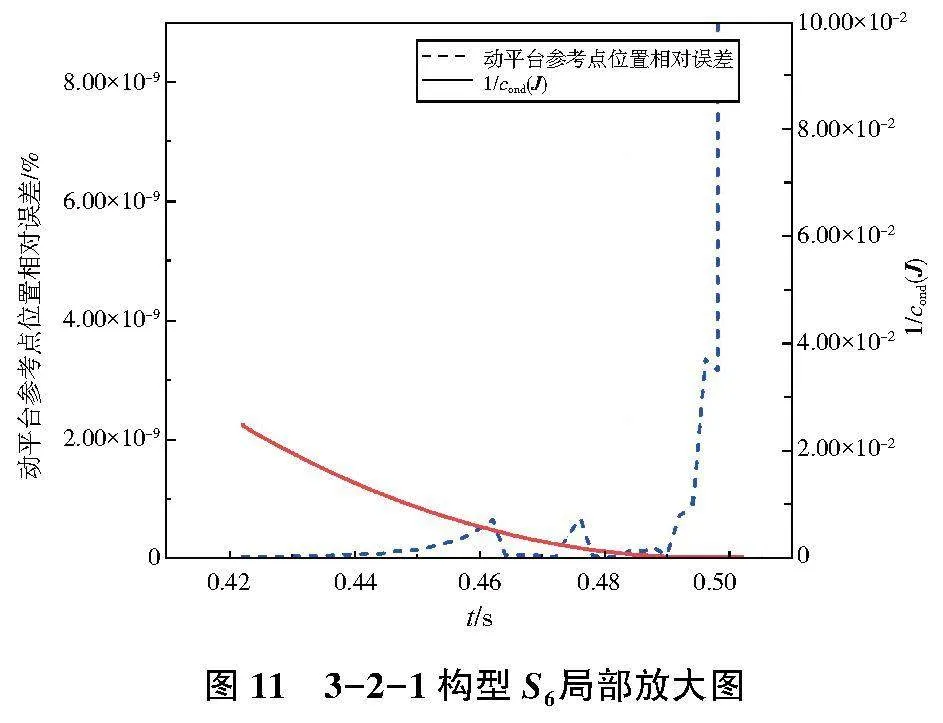
以3-2-1构型时的S6点为例,分析0.42s~0.50s之间动平台参考点位置相对误差与转动Jacobian矩阵条件数倒数之间的关系,如图11所示。
结果显示,随着动平台不断向奇异点运动,转动Jacobian条件数的倒数不断趋近于0,在该值约等于7.027×10-5时,动平台参考点位置相对误差发生突变。
3 结语
利用ADAMS软件仿真了9-3 Stewart型并联机器人在2-2-2构型和3-2-1构型时的情况,分析了动平台接近奇异位形时的运动精度。
本文从运动传递性能的角度,通过虚拟样机实验研究了机器人Jacobian矩阵条件数的临界值,而并没有考虑机构的力传递性能。接下来主要考虑两个方面工作:
1)探究并联机器人的力传递性能与奇异性能之间的关联;
2)通过实物样机实验,验证并联机器人的奇异性能对运动/力传递性能的影响规律。
参考文献:
[1] ENFERADI J,NIKROOZ R. The performance indices optimization of a symmetrical fully spherical parallel mechanism for dimensional synthesis[J]. Journal of Intelligent amp; Robotic Systems,2018,90(3):305-321.
[2] 相铁武. Stewart并联机器人仿真系统实现分析[J]. 中国设备工程,2020(6):32-33.
[3] OU J J,XI F F,SHEN H P,et al. A novel stewart-type parallel mechanism with topological reconfiguration:design,kinematics and stiffness evaluation[J]. Mechanism and Machine Theory,2021,162:104329.
[4] 童身亮. 发动机轻量化途径及工艺创新探究[J]. 内燃机与配件,2021(5):33-34.
[5] 王国华,宁玉浩,陈笑天,等. 锻钢活塞有限元分析及优化[J]. 内燃机,2019(6):40-42.
[6] 宋树峰,薛冬新,王洪峰,等. 某柴油机机体静强度有限元分析[J]. 内燃机与动力装置,2018,35(2):47-51.
[7] 江海洋,孙明月,吴铭方,等. 7075铝合金热变形连接接头的组织与性能[J]. 金属热处理,2020,45(2):46-50.
[8] 李贵旺. 海上平台往复式活塞压缩机故障分析及轻量化改造[J]. 天津科技,2020,47(4):55-58.
[9] 胡振,乔信起,王渠东,等. 发动机活塞轻量化的研究进展[J]. 小型内燃机与摩托车,2013(6):76-81.
[10] 牛飞. 结构拓扑优化设计若干问题的建模、求解及解读[D]. 大连:大连理工大学,2013.
