
基于PID的液压盘式刹车系统的优化与仿真
2024-08-31 00:00:00薛凯琳王小龙郑凯
机械制造与自动化 2024年3期







摘 要:以提高液压盘式刹车系统的稳定为目标,提出一种具有PID反馈环节的自适应控制系统。阐述液压盘式刹车系统的基本结构与参数;构建液压盘式刹车系统的数学模型,以单神经网络算法为基础,完成PID控制环节的优化设计;利用AMESim软件,以传感器、电磁比例换向阀、PID控制环节为核心构建自适应控制系统的仿真模型并进行仿真分析。结果证明:PID控制系统提高了液压盘式刹车系统的响应速度与稳定性。
关键词:液压;盘式刹车;PID;仿真
中图分类号:TP391.9文献标志码:B文章编号:1671-5276(2024)03-0158-05
Optimization and Simulation of Hydraulic Disc Brake System Based on PID
Abstract:With the aim of improving the stability of hydraulic disc brake system, an adaptive control system with PID feedback link is proposed. The basic structure and parameters of the hydraulic disc brake system are described. The mathematical model of the hydraulic disc brake system is constructed, and the optimization design of PID control link is completed based on the single neural network algorithm. With AMESim software, the simulation model of the adaptive control system is built based on the sensor, electromagnetic proportional directional valve and PID control link , and its the simulation analysis is carried out. The results show that PID control system improves the response speed and stability of hydraulic disc brake system.
Keywords:hydraulic pressure; disc brake; PID; simulation
0 引言
刹车系统作为工程机械与设备进行正常工作的重要组成,其系统的稳定性与响应速度直接影响着设备的平稳运行,而传统的液压盘式刹车系统因其响应效果差、响应速度慢,己无法满足使用者的要求[1-2]。因此,如何在保证液压盘式刹车系统原有性能的同时,提高其系统的响应速度与稳定性,成为值得研究的问题。本文设计了一种提高液压盘式刹车系统运行稳定性与可靠性的自动控制系统。通过PID反馈环节对液压盘式刹车系统中的电磁比例换向阀进行有效控制,提高液压盘式刹车系统在外部载荷不断变化等特殊条件下的可靠性,提高液压盘式刹车系统的使用范围与效率。
设计目标:
1)液压盘式刹车系统的建模;
2)单神经网络PID算法的优化;
3)液压盘式刹车系统PID控制环节仿真实验。
1 液压盘式刹车的结构与参数
1.1 基本结构
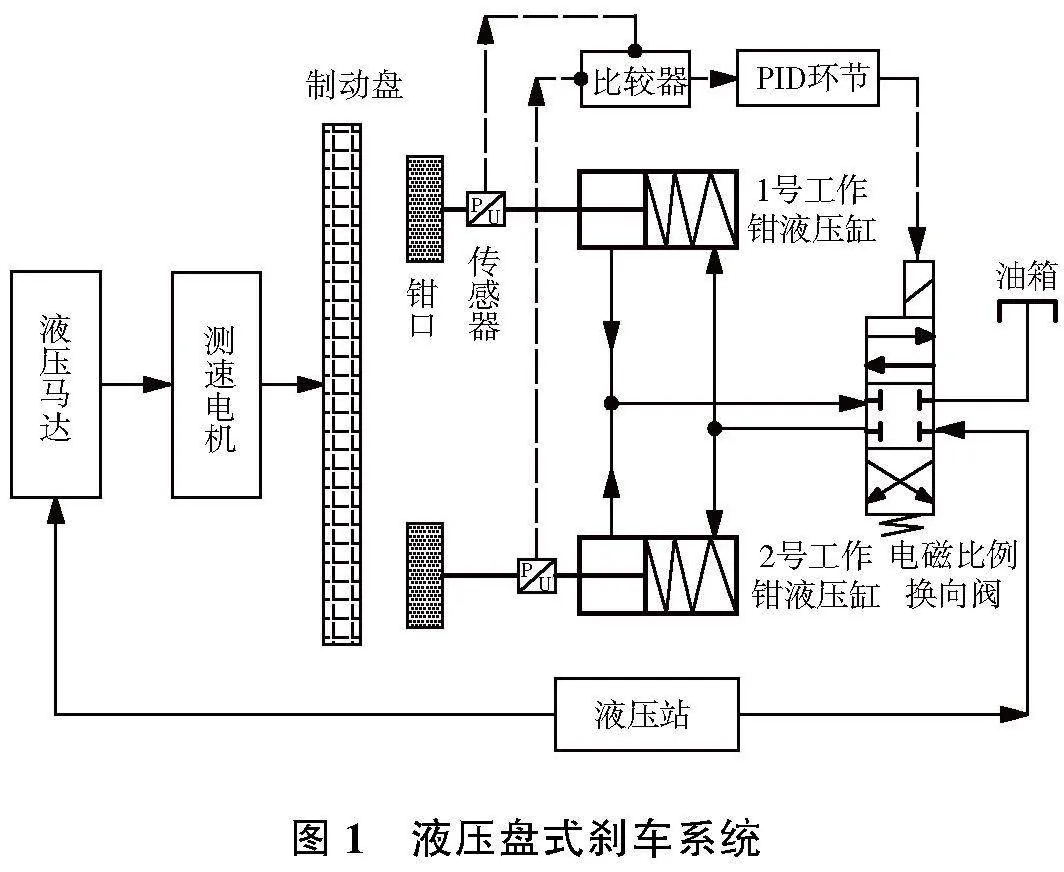
本文以PSZ75型液压盘式刹车系统[3]为例,基本构成如图1所示。
1.2 基本参数
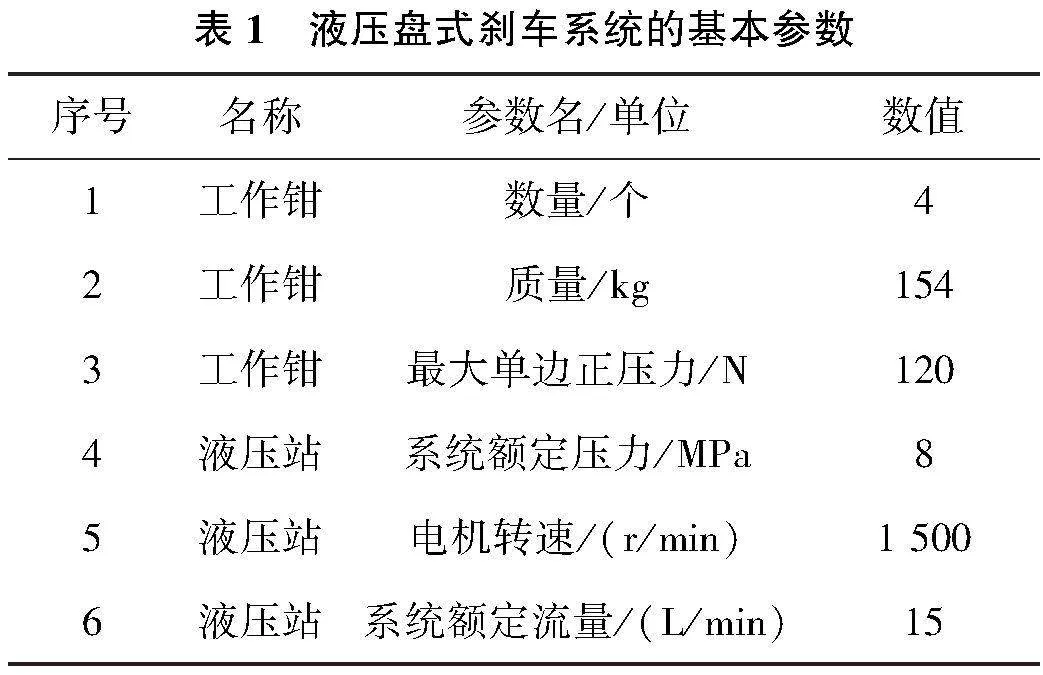
选取PSZ75型液压盘式刹车系统数据,以工作钳[4]的工作过程为研究对象,基本参数如表1所示。
2 液压盘式刹车的数学模型与受力分析
2.1 数学模型
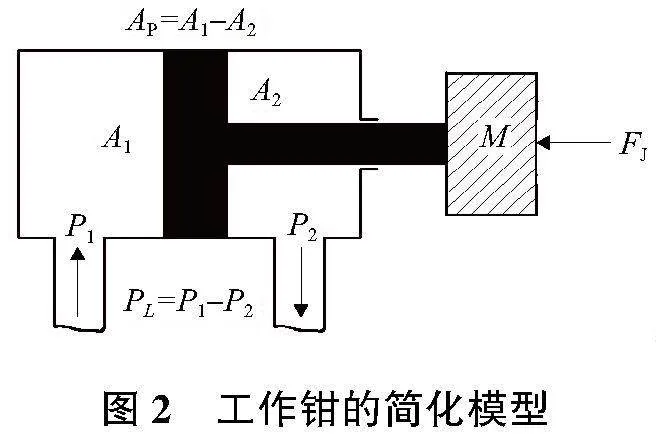
本文以工作钳液压缸的结构为基础,通过分析将工作钳等效为阀控单作用缸[5]。工作钳的简化模型如图2所示。图中:A1为无杆腔面积;A2为有杆腔面积;M为质量块。
如图2所示,对进入(流出为负)工作钳液压缸的流量Q进行分析[6],工作钳的数学模型为
式中:β为液体弹性模量,MPa;
V0为制动液压缸的初始速度,mm/s;
FJ为作用在活塞上的外负载力,kN;
AP为活塞有效作用面积,mm2;
xP为活塞位移变化量,mm。
进行制动时,工作钳液压缸通过调节制动压力来调节制动力矩的大小从而实现制动效果。当处于平衡状态时,活塞的位移、加速度、速度均设为0,这时可以近似认为工作钳液压缸复位弹簧的反抗力为定值,既等效到活塞上的力为定值。
这时在封闭液压缸容积中活塞的运动速度:
V=Apxp+V0(2)
设温度不变,则式(1)中工作钳液压缸的工作流量可简化为
由式(3)可知,进入或者流出工作钳液压缸的流量等于流过电磁比例阀的流量,因此通过对电磁比例换向阀的有效控制,就能够有效控制制动压力,增强液压刹车系统的稳定性与响应速度。
2.2 受力分析
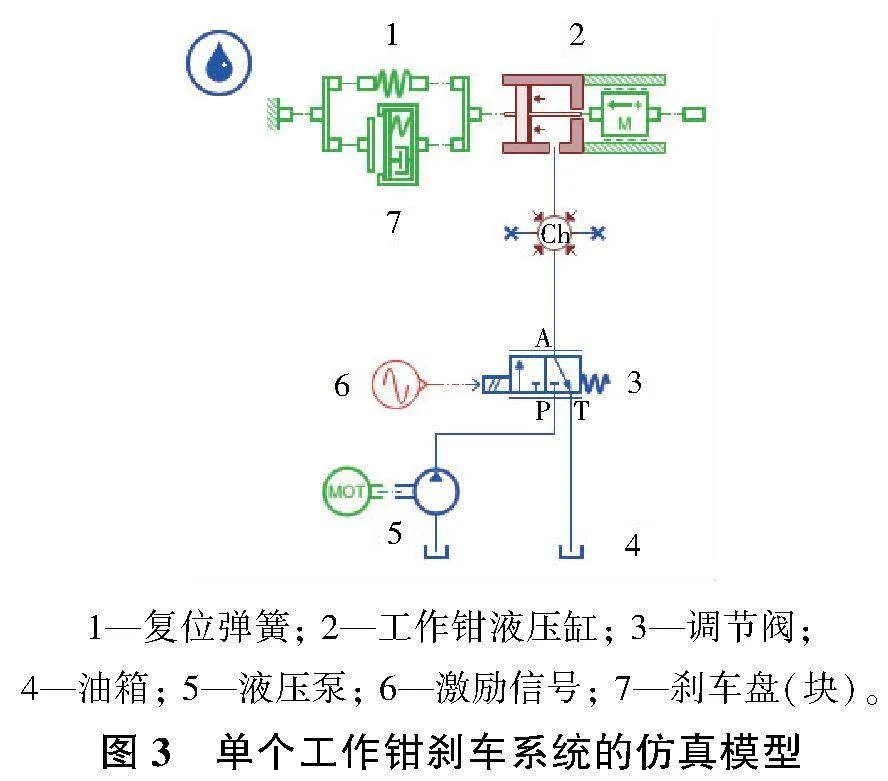
结合图1、图2中液压盘式刹车系统的基本结构,利用AMEsim绘制单个工作钳刹车系统的仿真模型[7],如图3所示。
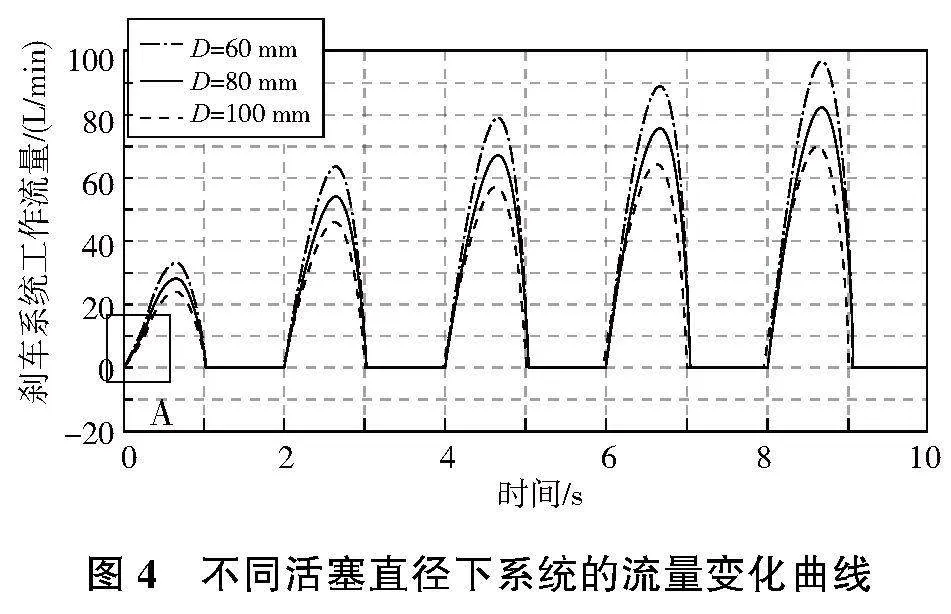
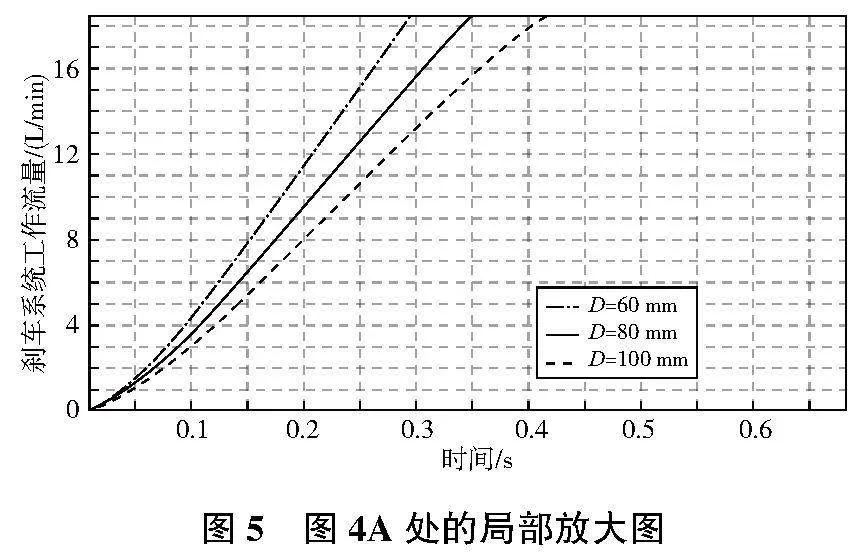
在AMEsim仿真环境中,按照表1设定了单个工作钳系统的基本参数,并选取频率为0.5Hz、振幅为5MPa的液压源为激励信号,同时进行了仿真实验,分别得到了不同活塞直径(60mm、80mm和100mm)下刹车系统的流量变化曲线,如图4所示。图4A处的局部放大图如图5所示。
通过AMEsim仿真,由图4可知,刹车系统工作时存在一定的延迟现象。由图5可知,液压缸直径越大,单位时间内的流量越小,刹车系统的制动响应速度越慢,说明液压缸体积(缸径)的变化与刹车系统工作流量间存在比例关系。
通过图4的仿真结果,得到了刹车系统在不同缸径与不同时刻的流量值和平均变化量,如表2所示。
本文在表2的基础上,构建了比例系数k的数学模型,利用MATLAB分析[8]得到了比例系数。
可得:k≈0.21。
由式(4)可知,单一的比例控制环节存在一定的局限性,在进行权值选取与确定时会耗费较长时间,进而降低了系统的响应速度。而不能忽略的是,实际制动过程的复杂性,因其外部负载处于不规律的连续变化中。因此本文以神经网络算法为基础,提出了单神经网络PID算法,并将其应用于液压盘式刹车系统中以提高其性能与效果。
3 单神经网络PID算法
在实际的工程应用中,液压盘式刹车系统通常由多个工作钳参与制动,因此将单神经网络与PID算法结合起来,实现PID控制器参数的实时整定,弥补了单一比例控制策略的不足,使得液压盘式刹车系统具有更强的适应性[9]。其控制框图如图6所示。
对期望值为r(k)与实际输出y(k)进行信号处理并得出单神经元网络所需的3个状态变量x1(k)、x2(k)、x3(k)。
式中k为比例系数,取k=0.35,则控制信号为
式中ωi(k)为xi(k)的加权系数。主要通过加权系数的调整实现PID参数自适应整定。采用有监督Hebb学习算法如下:
ωi(k+1)=(1-c)ωi(k)+η(e(k)u(k)xi(k))(7)
式中:(k)为误差信号;e(k)=r(k)-y(k);c为常数,0≤c≤1,c取0.1。因此权值修正量Δωi(k)可由下式表示:
控制量u(k)为:
式中:比例环节学习速率ηP=0.21;积分环节学习速率ηI=0.18;微分环节学习速率ηD=0.11。
通过PID反馈环节,控制系统成比例释放流量,进而达到稳定系统压力,提高液压盘式刹车系统稳定性的目的。
4 液压盘式刹车系统的优化与仿真
本文运用AMEsim软件通过绘制系统草图、建立子模型、参数设置、运行仿真4个环节[10],建立减震系统的仿真模型并进行了仿真实验,得到了相应的特性曲线。
4.1 建立仿真模型
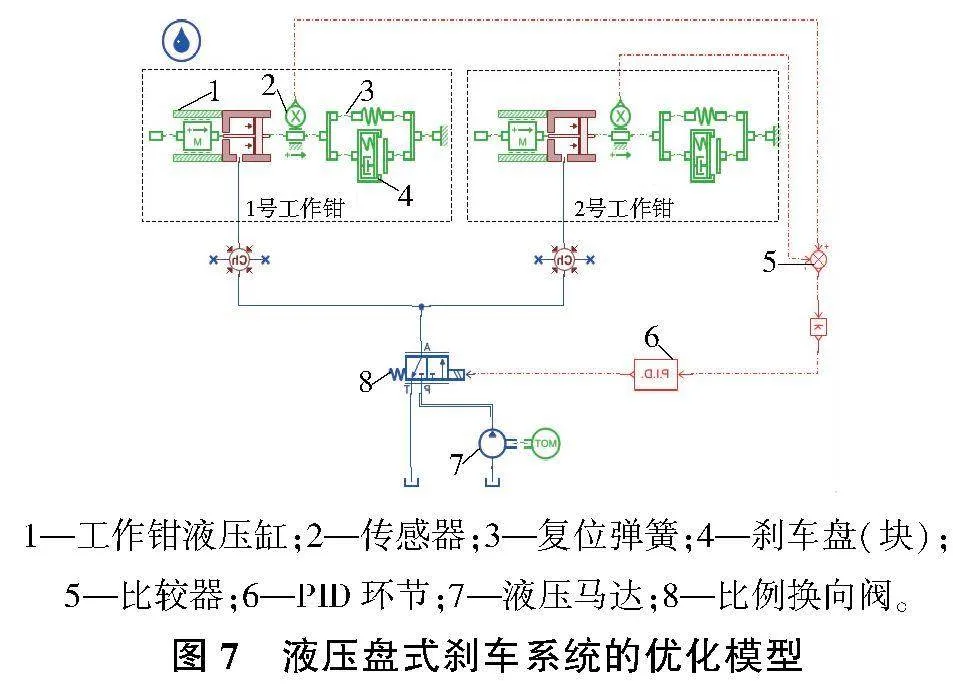
结合图3单个工作钳刹车系统的仿真模型,搭建了整个液压盘式刹车系统的PID控制优化模型,如图7所示。
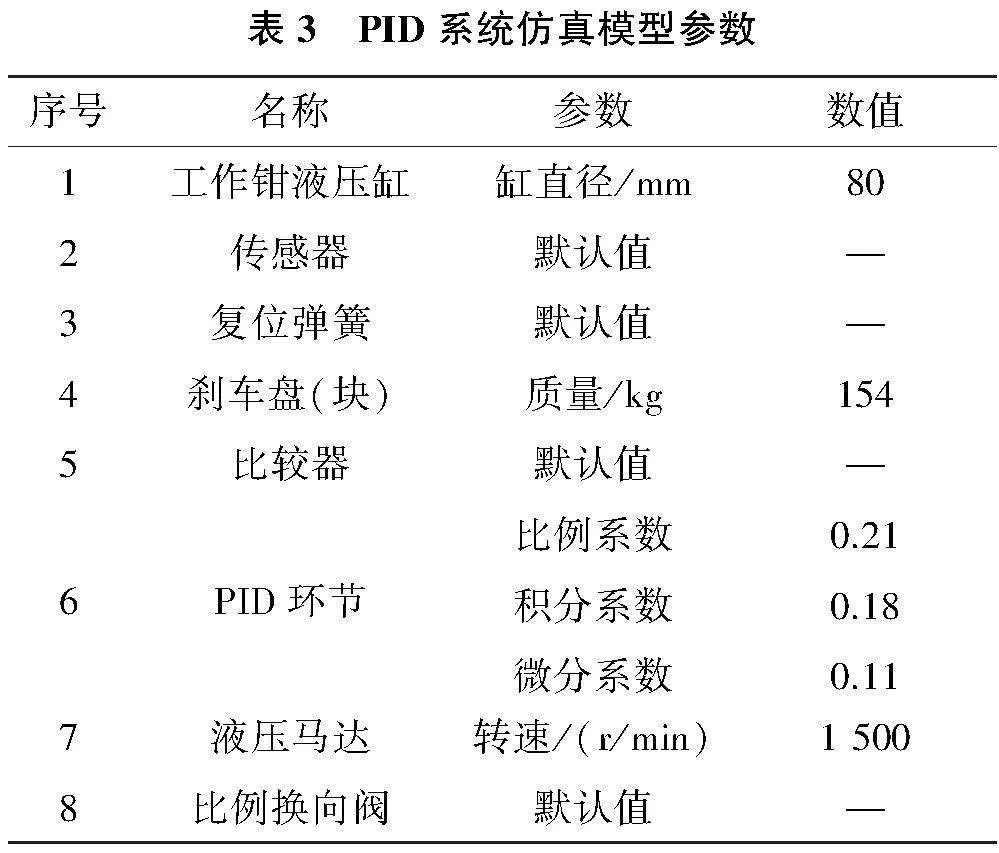
依据表1、图7,本文给出了PID系统仿真模型的基本参数,如表3所示,为后续的仿真提供依据。
4.2 系统的仿真与分析
1)系统仿真
本文依据4.1中的仿真模型,按照表3中的参数,进行了不含PID环节的设置并进行仿真,得到相应的特性曲线。
a)液压盘式刹车系统工作压力
液压盘式刹车系统工作压力特性曲线,如图8所示。
由图8可知,液压盘式刹车系统采用PID控制方式时,系统工作压力明显高于传统的控制方式,同时系统工作压力的变化过程更加平稳,无明显的压力波动,进而提高了刹车系统的稳定性。其次,PID控制使系统的响应速度明显提高,其工作压力达到稳定输出时所用的时间进一步减少。
b)液压盘式刹车系统工作流量
液压盘式刹车系统工作流量特性曲线,如图9所示。
由图9可知,液压盘式刹车系统采用PID控制方式时,系统工作流量在对应时刻的值明显高于传统的控制方式,进而保证了刹车系统的所需压力。同时,系统的响应速度明显提高,对系统延迟有了一定的抑制作用。
2)系统分析
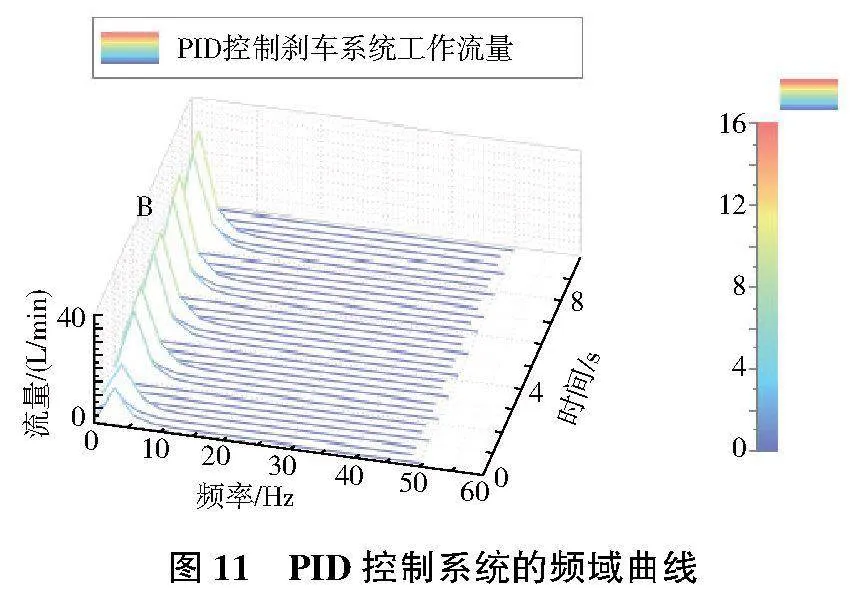
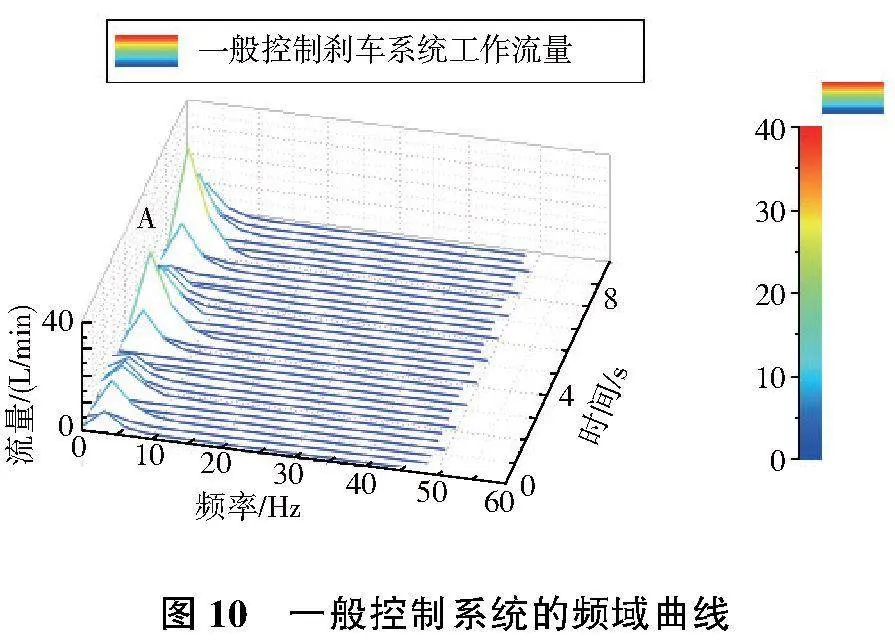
依据图9中的仿真运行结果,分别对2种控制系统的运行结果进行频域分析并对结果进行比较,如图10和图11所示。
通过频域分析发现,两种系统在刹车系统进行制动的开始阶段都出现了一定的延迟。随着时间的推移,两种系统逐渐进入稳定工作状态,这时图10中A处的流量波动依然较为明显。而这时,在相同时间PID自适应控制系统也进入了稳定工作状态,这时将图11中B处的流量状态与图10中A处相比较显示图11系统流量更加稳定。通过分析证明,PID自适应控制系统提高了液压盘式刹车系统的响应速度与稳定性。
5 结语
本文首先分析了液压盘式刹车系统的结构,建立了对应的数学与仿真实验模型。通过分析与仿真发现:当外部负载连续变化时,传统的控制方式引起了液压缸有效体积的不稳定变化,造成液压盘式刹车系统的响应速度较低,影响了液压盘式刹车的使用,其次,针对这一问题,以单神经算法为理论基础,以传感器、PID控制环节为核心设计了一种具有PID反馈环节的自适应控制系统,通过PID反馈环节的控制,提高刹车系统响应速度,进而达到提高系统稳定性与响应速度的目的。最后,以AMESim为手段搭建了PID自适应控制系统的仿真模型并进行了仿真实验,通过实验结果的对比分析表明,PID控制系统提高了液压盘式刹车系统的响应速度,保持了系统所需的工作流量与压力,提高了系统运行的可靠性,同时增强了设备的适用性,因此本设计具有一定的应用价值。
参考文献:
[1] 乔福家. 钻机液压盘式刹车系统工作原理与维护分析[J]. 设备管理与维修,2022(10):54-56.
[2] 周远宏. 钻机液压盘式刹车系统工作原理与维护浅析[J]. 中国石油和化工标准与质量,2020,40(2):123-124.
[3] 李顺. PSZ75液压盘式刹车系统的设计与研究[D]. 东营:中国石油大学(华东),2016.
[4] 文娟,肖苏宸. PSZ65液压盘式刹车工作钳设计[J]. 电子制作,2015(5):83-84.
[5] 钱占松. 三通阀控单作用缸在电液位置伺服系统的应用研究[J]. 液压与气动,2020(6):127-134.
[6] 栗君. 压缩式垃圾车液压油流量增加对其温度的影响[J]. 汽车与驾驶维修(维修版),2022(3):28-31.
[7] 李资,张海丽. 基于AMESim-Matlab的伺服电机速度-压力回路仿真研究[J]. 机械制造与自动化,2021,50(6):135-137.
[8] 李小伟,高清冉. 基于MATLAB的汽车悬架系统参数分析[J]. 济源职业技术学院学报,2022,21(1):47-50.
[9] 王琳,王文博,钱爱文. 神经网络模糊PID控制半主动悬架系统[J]. 洛阳理工学院学报(自然科学版),2022,32(2):65-72.
[10] 曹亚楠. 基于AMESim的大流量安全阀动态特性分析与仿真[D]. 西安:西安科技大学,2014.
猜你喜欢
重型机械(2020年2期)2020-07-24 08:16:18
石油化工建设(2018年2期)2018-07-11 01:24:56
凿岩机械气动工具(2016年2期)2016-11-11 07:34:04
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
凿岩机械气动工具(2014年2期)2014-03-01 03:59:58
