
R20机器人仿真分析与试验
2024-08-28 00:00:00陈朋威高飞邬凯
机械制造与自动化 2024年2期



摘"要:以串联关节机器人为研究对象,根据机器人结构参数建立D-H法的机器人运动学模型,推导机器人运动学方程。使用ADAMS软件对机器人进行动力学仿真分析,计算各关节驱动力矩随时间变化的数据,将动力学计算的各关节最大动载荷作为机器人结构设计和有限元计算的力学条件,对机器人铸件进行有限元仿真分析,搭建实验平台,对机器人位置重复性、姿态重复性、重复定位精度、位置稳定时间和位置超调量进行测试,对实验数据进行整理和分析。仿真计算和实验结果表明:该机器人设计合理,满足设计指标要求。
关键词:机器人;运动学;有限元;ADAMS
中图分类号:TP242""文献标志码:A""文章编号:1671-5276(2024)02-0188-05
R20 Robot Simulation Analysis and Test
CHEN Pengwei1, GAO Fei2, WU Kai1
(1. School of Mechanical Engineering,Shaanxi Polytechnic Institute,Xianyang 712099,China;
2. College of Mechanical and Vehicle Engineering,Taiyuan University of Technology,Taiyuan 030024,China)
Abstract:Taking the serial joint robot as the research object, the robot kinematics model of D-H method is established according to the robot structural parameters to derive the robot kinematics equation. The dynamic simulation analysis of the robot is carried out using ADAMS software, the data of the driving torque of each joint changes with time is calculated, and the maximum dynamic load of each joint calculated by dynamics is taken as the mechanical condition of the robot structural design and finite element calculation to conduct finite element simulation analysis on robot casting. With the establishment of experimental platform, the robot's position repeatability, posture repeatability, repetitive positioning accuracy, position stability time and position overshoot are tested, an their experimental data are sorted out and analyzed. The simulation calculation and experimental results verify that the robot design is reasonable and meets the index requirements as designed.
Keywords:robot; kinematics; finite element; ADAMS
0"引言
工业机器人在工业制造、医疗、航空航天等领域得到越来越广泛的应用[1]。六自由度串联多关节工业机器人是一个复杂的多刚体系统[2]。众多学者对机器人开展了大量的研究,如机器人构型设计分析[3]、机器人运动学分析[4]、机器人动力学建模和仿真[5-6]、机械臂运动精度关键技术的研究[7]、机器人运动及路径规划[8-9]、机器人标定方法及算法[10-11]等。
本文以负载能力20kg的六自由度串联关节工业机器人R20为研究对象,在仿真计算数据和实验数据基础上对R20机器人性能及机器人设计分析方法的合理性进行试验验证。
1"机器人结构参数及运动学分析
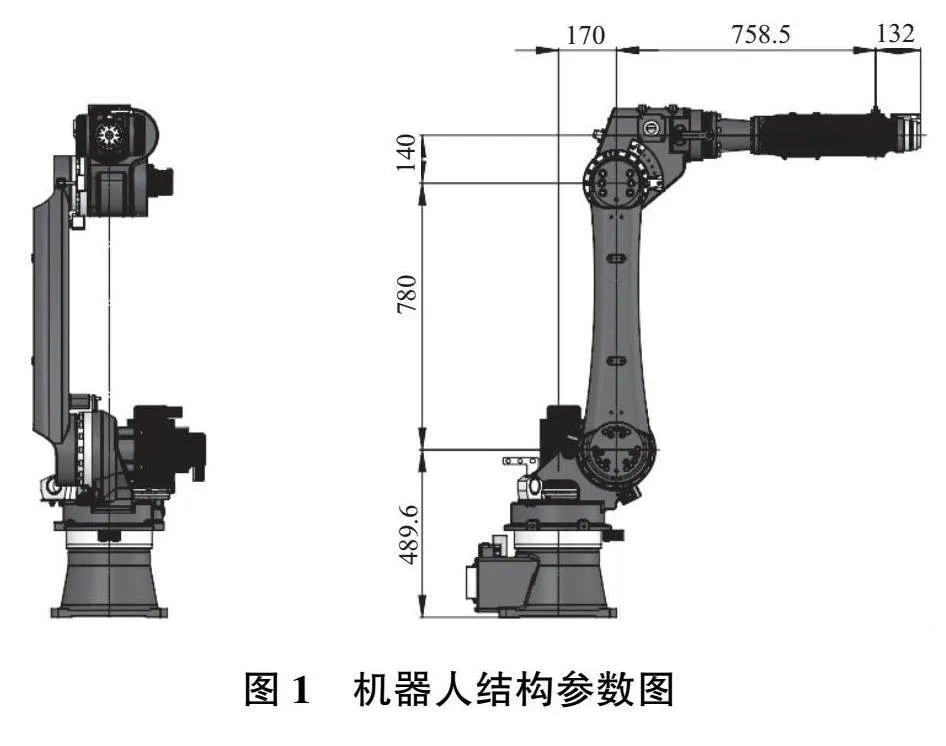
机器人机构构型为六自由度串联关节机器人,机器人结构模型和参数如图1所示。
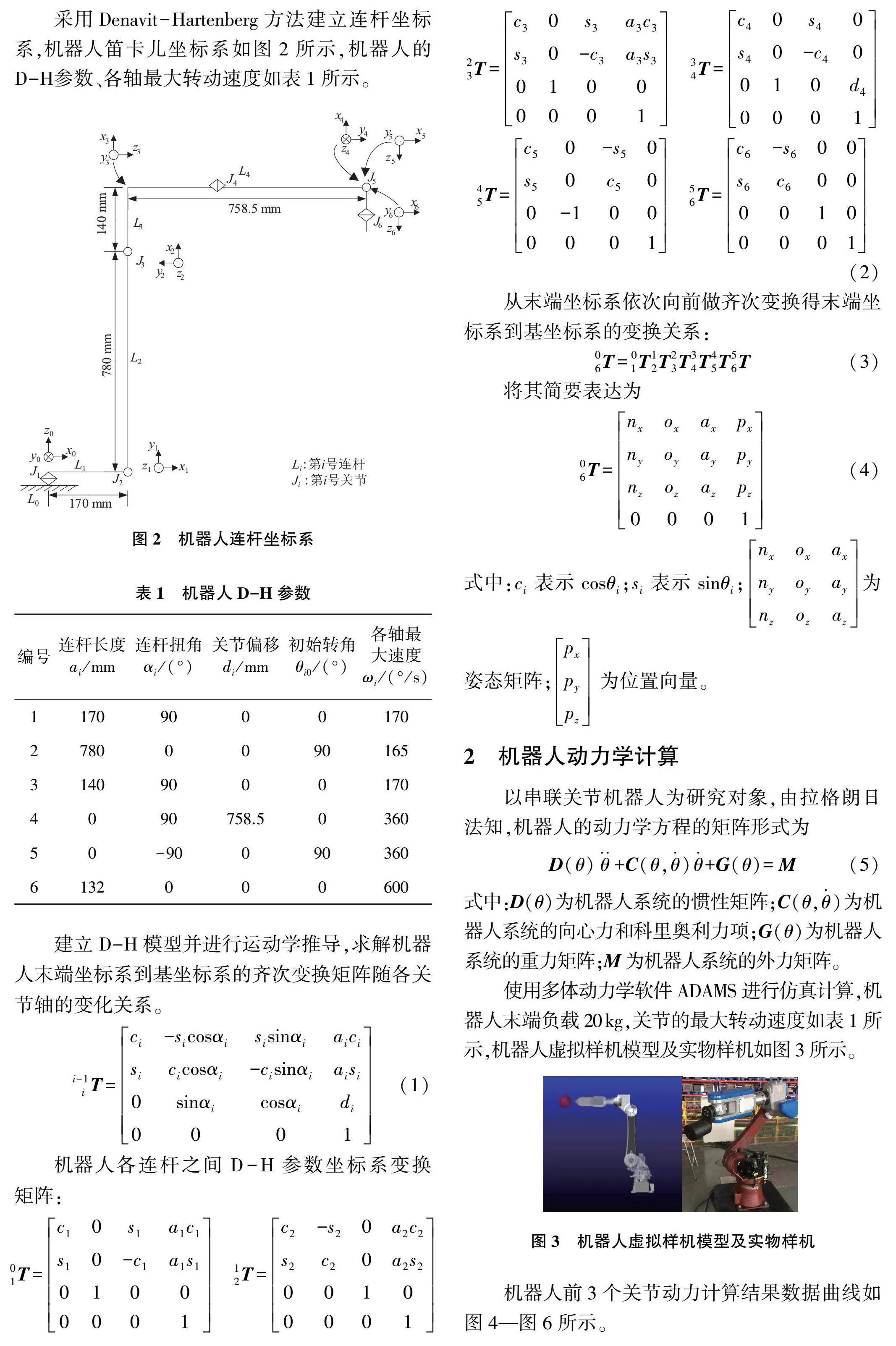
采用Denavit-Hartenberg方法建立连杆坐标系,机器人笛卡儿坐标系如图2所示,机器人的D-H参数、各轴最大转动速度如表1所示。
建立D-H模型并进行运动学推导,求解机器人末端坐标系到基坐标系的齐次变换矩阵随各关节轴的变化关系。
i-1"iT=ci-sicosαisisinαiaici
sicicosαi-cisinαiaisi
0sinαicosαidi
0001(1)
机器人各连杆之间D-H参数坐标系变换矩阵:
01T=c10s1a1c1
s10-c1a1s1
0100
0001"12T=c2-s20a2c2
s2c20a2s2
0010
0001
23T=c30s3a3c3
s30-c3a3s3
0100
0001"34T=c40s40
s40-c40
010d4
0001
45T=c50-s50
s50c50
0-100
0001"56T=c6-s600
s6c600
0010
0001
(2)
从末端坐标系依次向前做齐次变换得末端坐标系到基坐标系的变换关系:
06T=01T12T23T34T45T56T(3)
将其简要表达为
06T=nxoxaxpx
nyoyaypy
nzozazpz
0001(4)
式中:ci表示cosθi;si表示sinθi;nxoxax
nyoyay
nzozaz为姿态矩阵;pxpypz 为位置向量。
2"机器人动力学计算
以串联关节机器人为研究对象,由拉格朗日法知,机器人的动力学方程的矩阵形式为
D(θ)θ··+C(θ,θ·)θ·+G(θ)=M(5)
式中:D(θ)为机器人系统的惯性矩阵;C(θ,θ·)为机器人系统的向心力和科里奥利力项;G(θ)为机器人系统的重力矩阵;M为机器人系统的外力矩阵。
使用多体动力学软件ADAMS进行仿真计算,机器人末端负载20kg,关节的最大转动速度如表1所示,机器人虚拟样机模型及实物样机如图3所示。
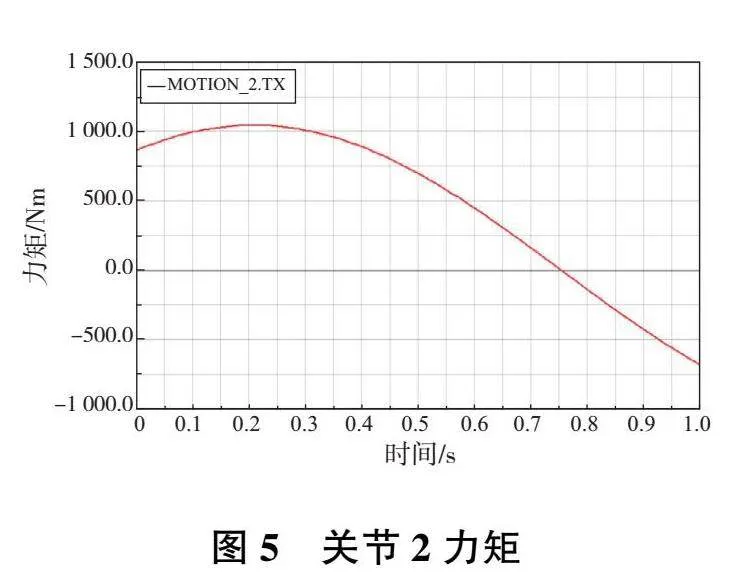
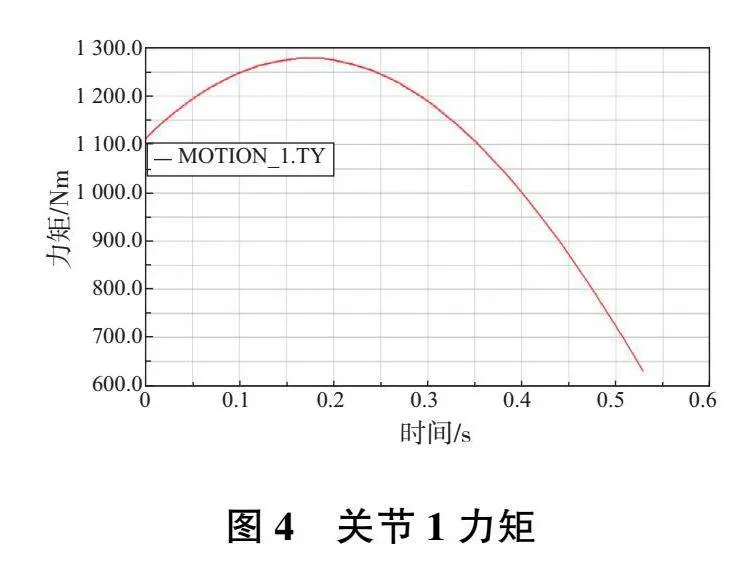
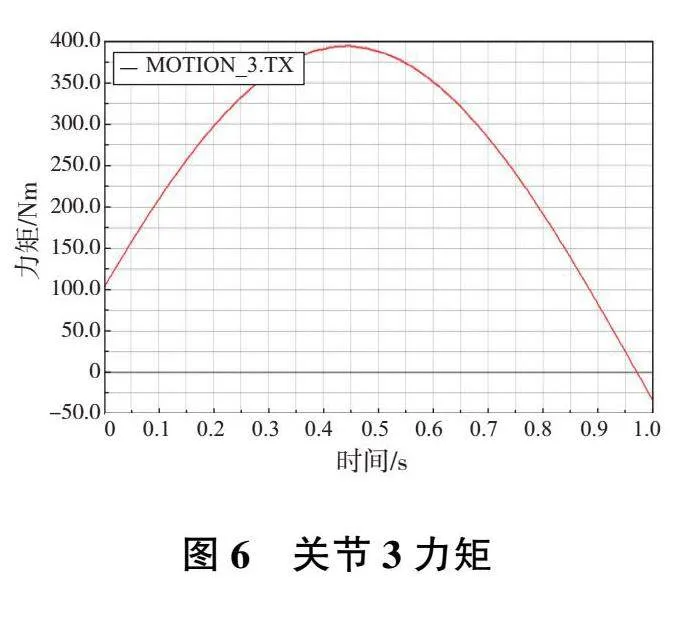
机器人前3个关节动力计算结果数据曲线如图4—图6所示。
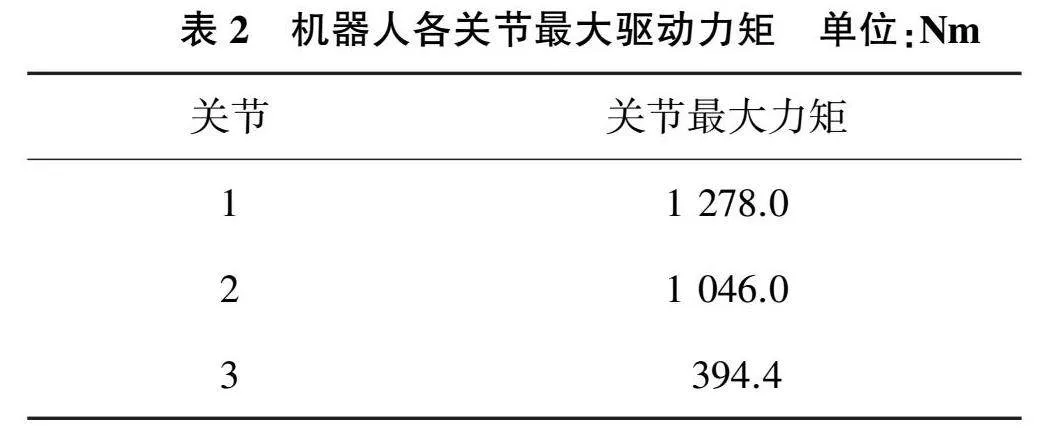
在图4—图6数据曲线中提取机器人各关节最大驱动力矩值如表2所示。
3"机器人结构件有限元分析
机器人作业过程中,机器人铸件的结构力学性能对机器人运动稳定性和运动精度有着较大的影响,因此对机器人主要铸件进行结构力学分析十分必要。
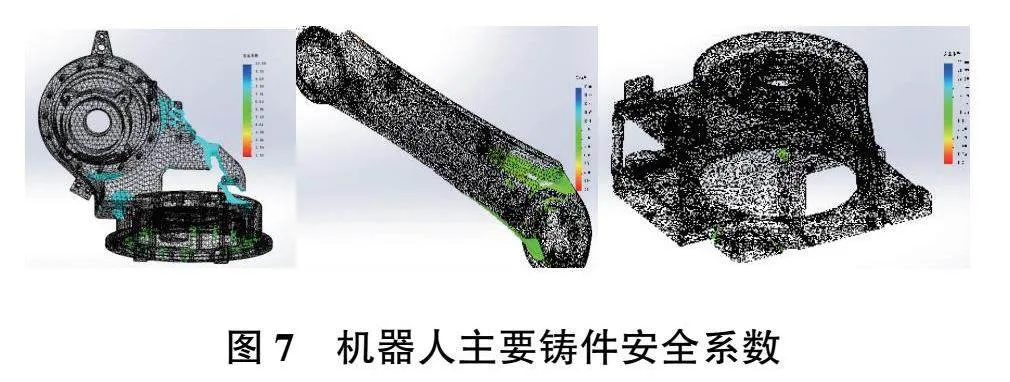
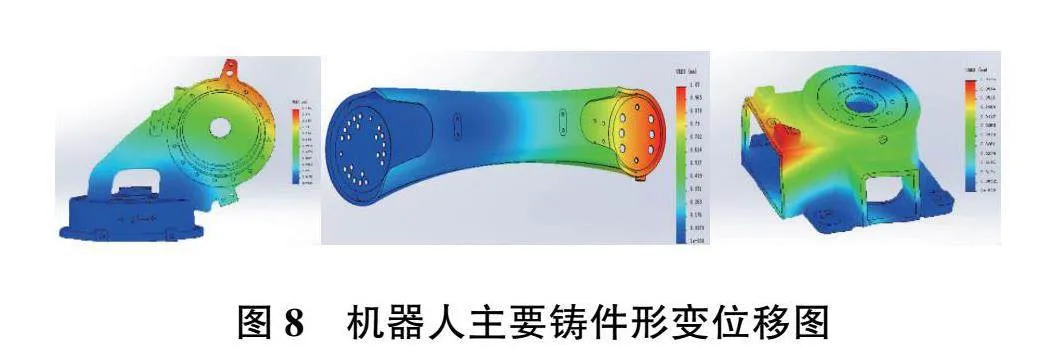
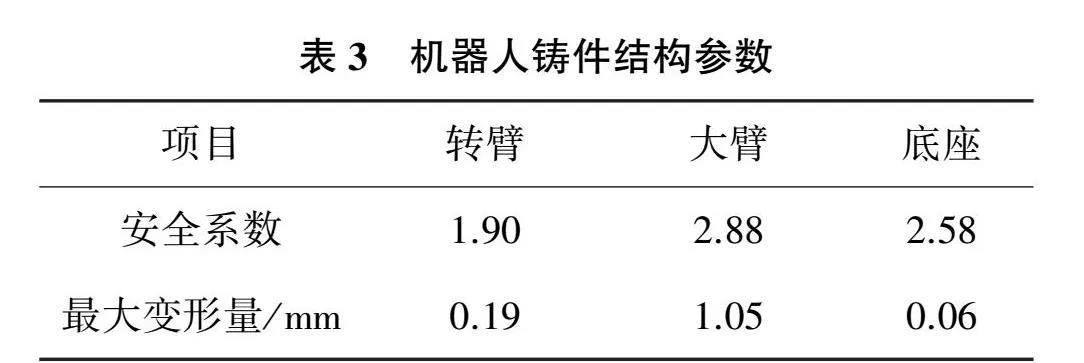
以动力学计算取得的机器人各关节力矩数据作为各铸件的负载依据,如图7—图8及表3所示。根据FEA算法对机器人主要铸件进行有限元计算。
机器人铸件结构力学计算结果显示,机器人大臂变形量为1.05mm,在铸件中变形量最大,机器人铸件最小安全系数1.90,满足设计要求。
4"实验与分析
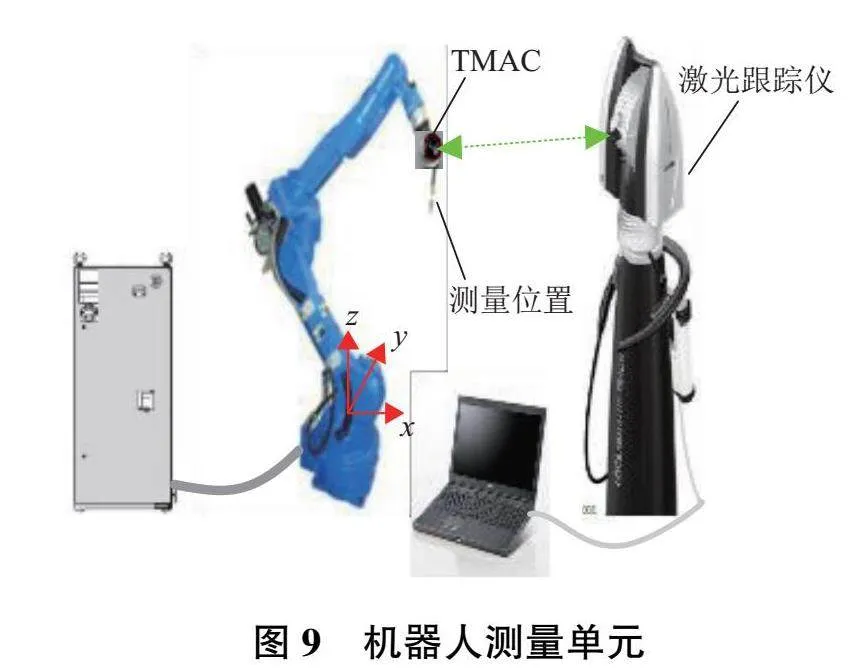
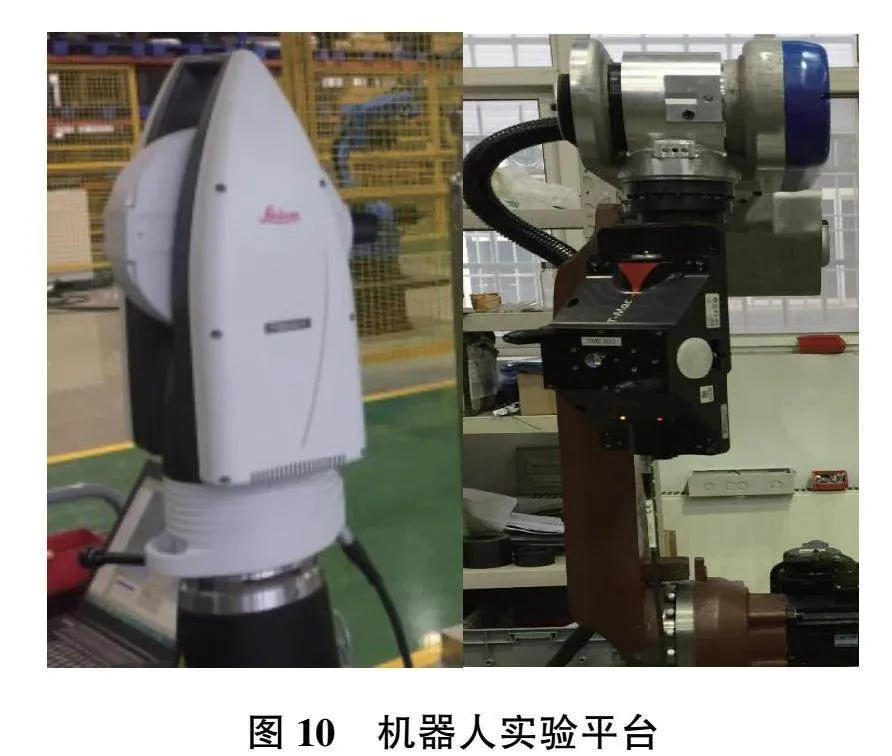
依据《GB/T 12642—2013工业机器人性能规范及其试验方法》,对机器人位置重复性、姿态重复性、重复定位精度,位置稳定时间和位置超调量进行实验,测量单元如图9所示,机器人实验平台如图10所示。机器人末端安装TMAC,使用Leica AT960-MR激光跟踪仪实时测量机器人末端运行轨迹。
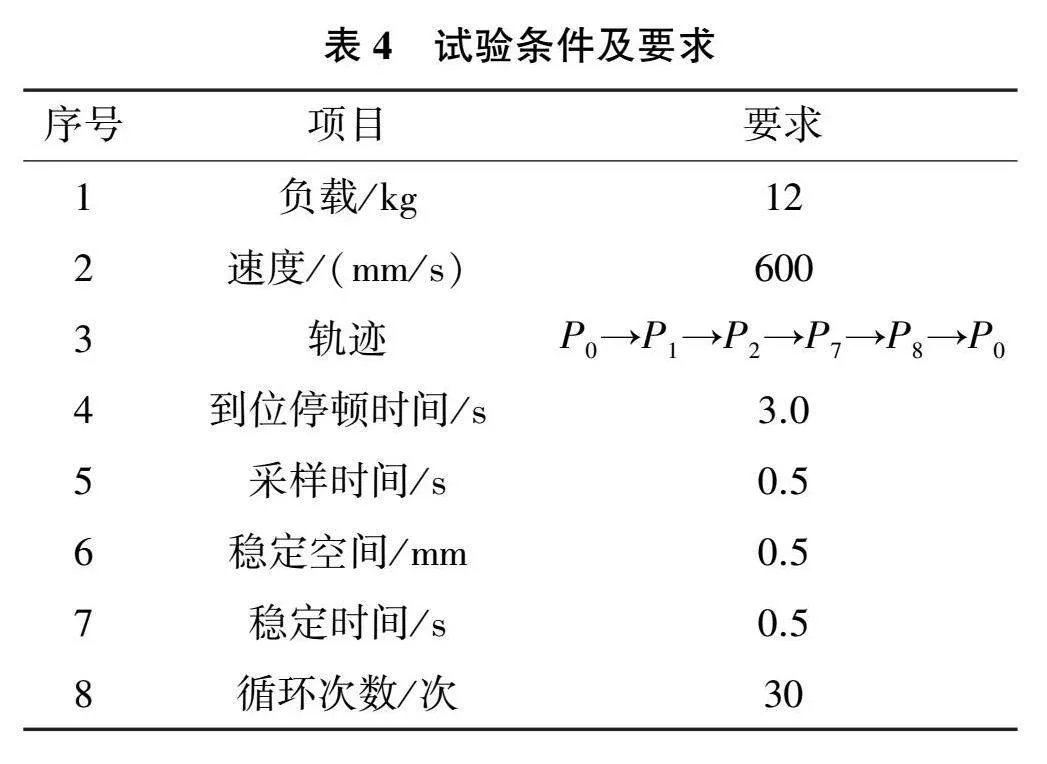
1)试验条件:试验条件如表4所示。
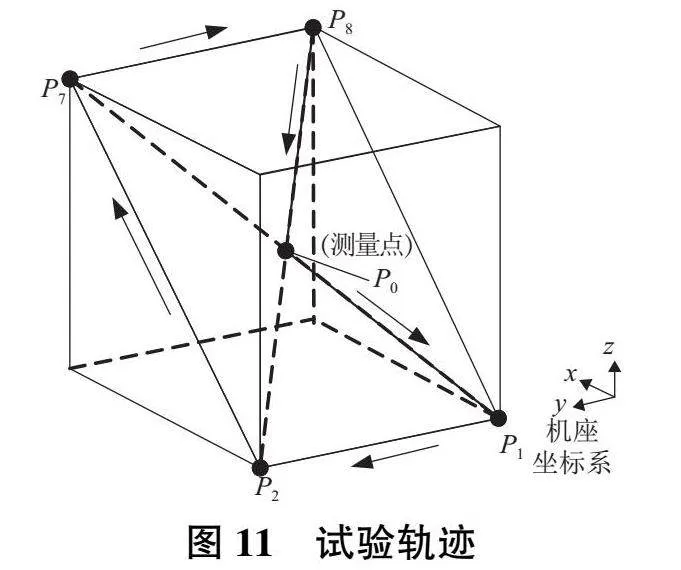
2)试验轨迹:试验轨迹采用矩形轨迹,如图11所示。
4.1"位置重复性、姿态重复性和重复定位精度
1)位置重复性
到位停留时间为3s时,矩形轨迹P1、P2、P7、P8、P0 5点的位置重复性如表5所示。
2)姿态重复性
到位停留时间为3s时,矩形轨迹P1、P2、P7、P8、P0 5点绕x、y、z 3个方向的姿态重复性如表6所示。
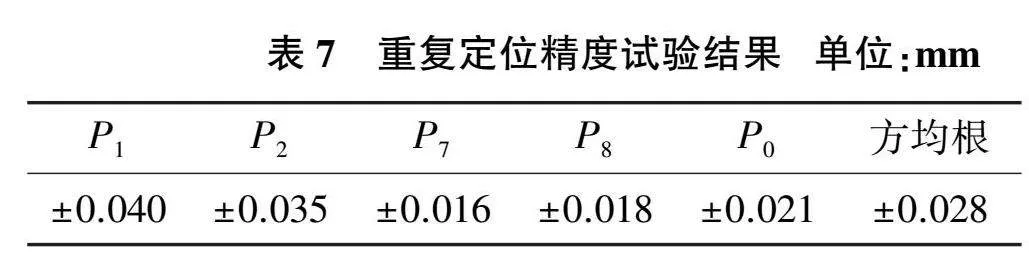
3)重复定位精度
到位停留时间为3s时,矩形轨迹P1、P2、P7、P8、P0 5点的重复定位精度如表7所示。
4.2"位置稳定时间和位置超调量
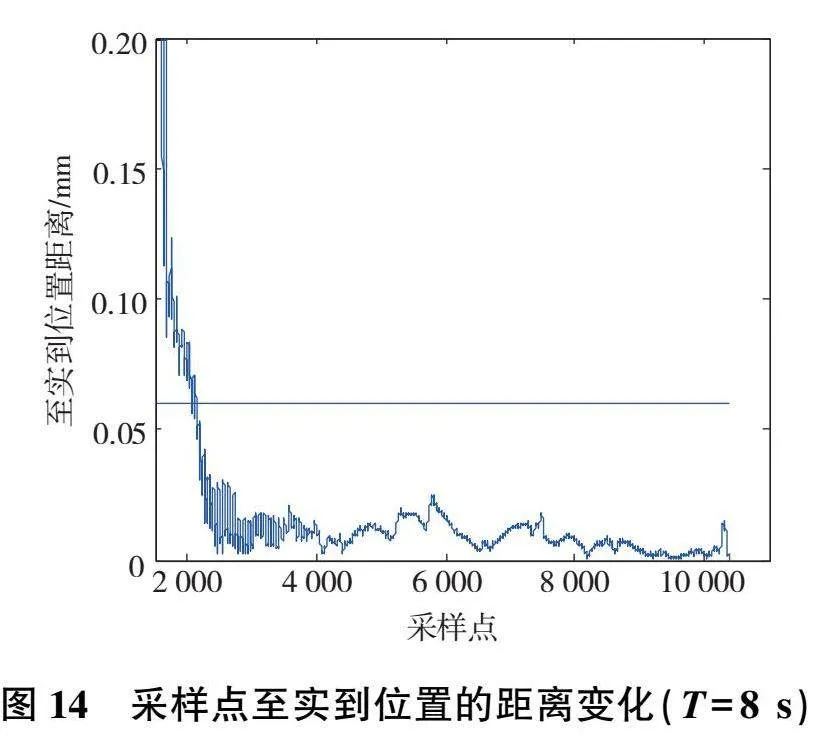
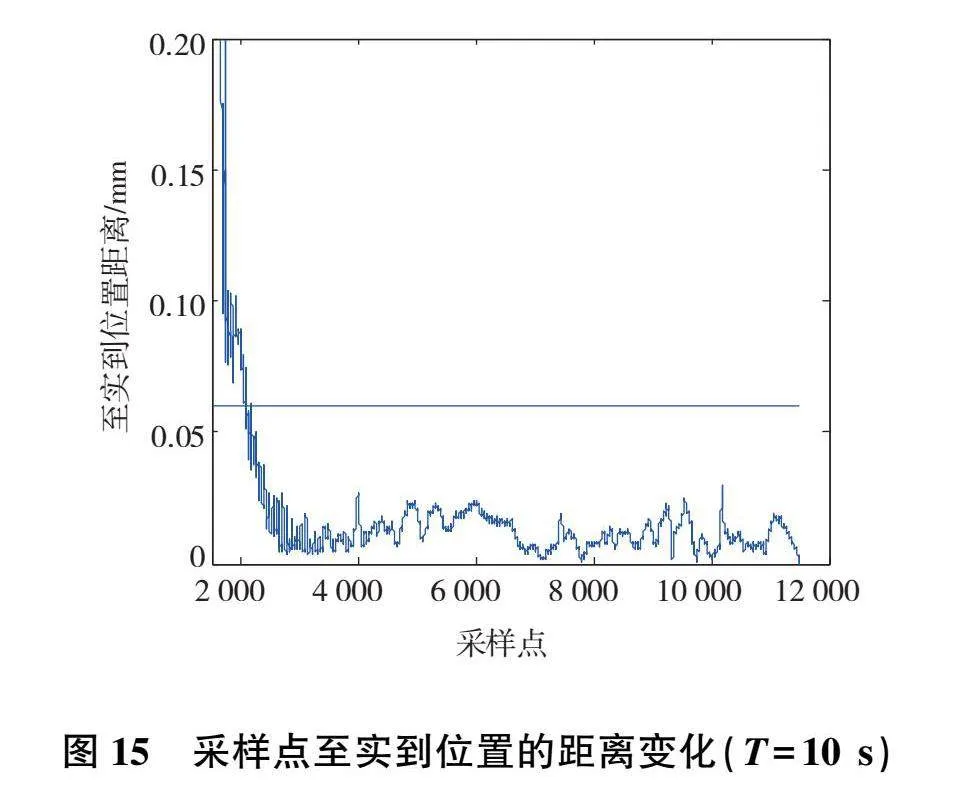
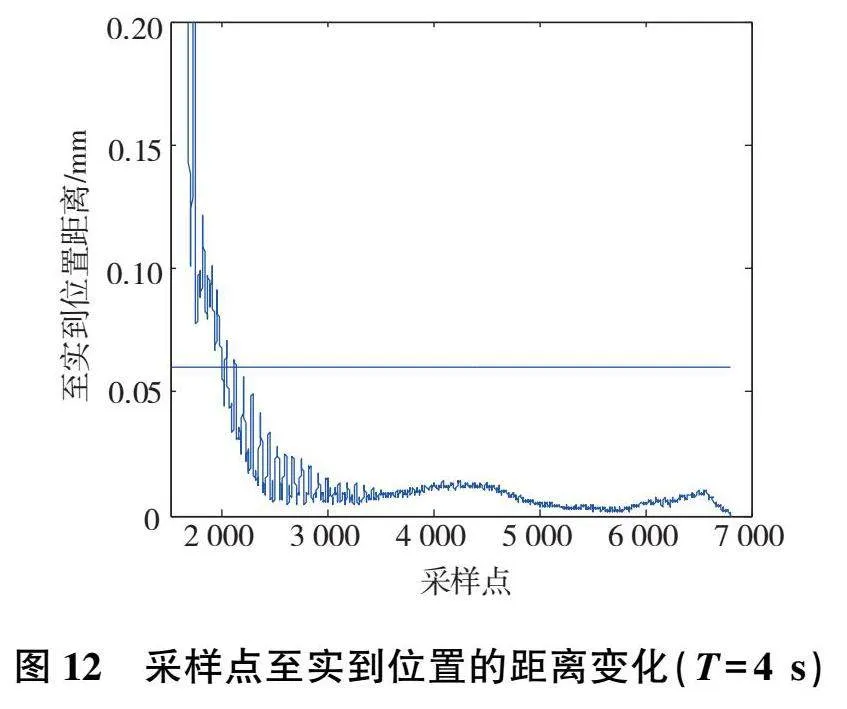
多次测量到达P0点时采样点至实到位置的距离变化如图12—图15所示。
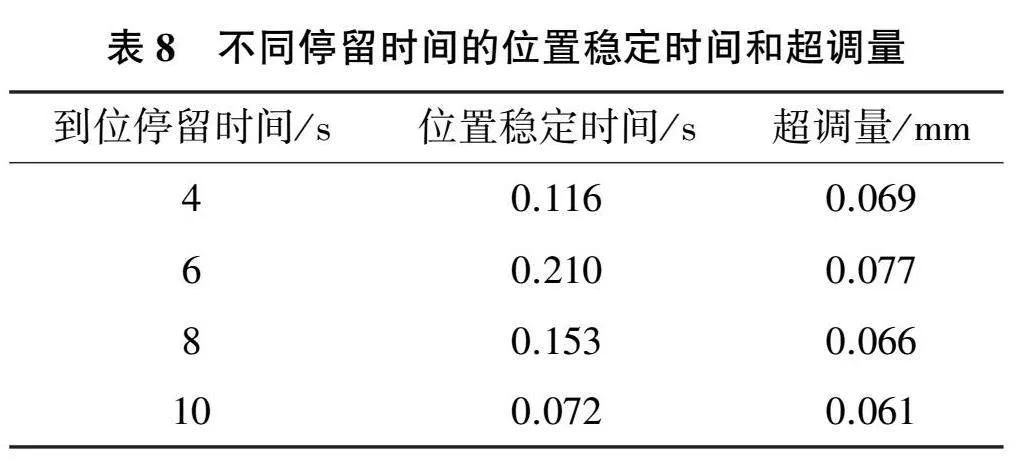
机器人到位停留时间的位置稳定时间和超调量计算结果如表8所示。机器人位置稳定时间较短,机器人到位无超调现象。
5"结语
本文以20kg负载能力的六自由度串联关节工业机器人为研究对象,根据串联关节机器人结构参数和机构特点,采用Denavit-Hartenberg方法建立连杆坐标系,进行机器人运动学分析;使用多体动力学软件ADAMS计算了机器人关节的驱动力矩,各计算关节加减速力矩轨迹,其曲线连续且比较平稳,表明了各关节动力学设计和运动学规划的合理性。以计算所得的最大动力矩作为结构有限元设计的力学输入条件,对机器人主要铸件进行结构设计和有限元分析,有限元分析结果表明了机器人铸件结构力学设计的合理性。
搭建机器人实验平台,由实验结果验证了该机器人具有良好的性能。机器人设计合理,仿真分析和实验方法可以为同类机器人的研究提供支撑。
参考文献:
[1] 潘敬锋,訾斌,王正雨,等. 基于试验与仿真联合分析的喷涂机器人轨迹精度可靠性研究[J]. 机械工程学报,2020,56(19):210-220.
[2] 新松机器人自动化股份有限公司.柔性多关节机器人[EB/OL]. (2015-11-06)[2022-11-15]. http://www.siasun.com/ product/industrial robot/product 201511 06093319.htm1.
[3] 田勇,王洪光,潘新安,等. 协作机器人的构型分析研究[J]. 智能系统学报,2019,14(2):217-223.
[4] 朱庆浩,臧强,岳华,等. 6R工业机器人的运动学分析与仿真[J]. 中国科技论文,2020,15(8):953-958.
[5] 郭忠峰,李文龙,郭辉,等. 轴承环锻压操作机器人运动学分析与动力学仿真[J]. 制造技术与机床,2020(8):13-16.
[6] 沈国栋. 考虑关节柔性的六自由度串联工业机器人动力学建模与末端抖动抑制[D]. 济南:山东大学,2020.
[7] 王琨. 提高串联机械臂运动精度的关键技术研究[D]. 合肥:中国科学技术大学,2013.
[8] MOE S,GRAVDAHL J T,PETTERSEN K Y. Set-based control for autonomous spray painting[J]. IEEE Transactions on Automation Science and Engineering,2018,15(4):1785-1796.
[9] 关英姿,刘文旭,焉宁,等. 空间多机器人协同运动规划研究[J]. 机械工程学报,2019,55(12):37-43.
[10] 周星,黄石峰,朱志红. 六关节工业机器人TCP标定模型研究与算法改进[J]. 机械工程学报,2019,55(11):186-196.
[11] 韩奉林,江晓磊,严宏志. 基于可测距平板工具的机器人TCP标定方法[J]. 计算机工程与应用,2016,52(18):18-23.
收稿日期:20230117
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
海军航空大学学报(2015年1期)2015-11-11 17:18:37
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
机械工程师(2015年10期)2015-02-02 01:14:03
机电产品开发与创新(2014年4期)2014-03-11 16:42:24
机械制造与自动化(2014年1期)2014-03-01 04:22:01
