
轨道交通车辆吹扫机器人智能路径规划研究
2024-08-28 00:00:00刘进
机械制造与自动化 2024年4期







摘 要:针对城市轨道交通车辆吹扫机器人路径规划问题,提出一种基于CHNN神经网络的全覆盖路径规划算法,综合机器人运行方向上障碍物信息与吹扫信息建立栅格地图,采用矩形分解法将整个工作空间划分为不同矩形子区域,在各子区域内基于栅格信息分别得到全覆盖路径,各子区域之间则采用CHNN神经网络进行遍历寻优。仿真结果表明:所提出的算法可以有效解决吹扫机器人全覆盖路径规划过程中的路径缠绕和清洁死区问题,降低了路径重复率,提高机器人吹扫效率,具有较好的工程应用前景。
关键词:吹扫机器人;CHNN神经网络;全覆盖; 路径规划
中图分类号:TP242.3 文献标志码:B 文章编号:1671-5276(2024)04-0245-05
Research on Intelligent Path Planning of Purging Robot for Rail Vehicles
LIU Jin
(Suzhou Rail Transit Group Co., Ltd.,Suzhou 215101, China)
Abstract:With regard to the path-planning of urban rail transit vehicle purging robot, a full-coverage path-planning algorithm based on CHNN neural network was proposed. The raster map was established by integrating obstacle information and purging information in the robot's moving direction. The whole workspace was divided into different rectangular sub-regions by rectangular decomposition method, and in each sub-region, the full coverage path was obtained based on grid information, and CHNN neural network was used for traversal optimization between sub-regions. The simulation results show that the proposed algorithm can effectively solve the problems of path winding and cleaning dead zone in the process of full coverage path planning of the robot, reduce the path repetition rate and improve the efficiency of the robot, which has a good prospect of engineering application.
Keywords:purging robot; CHNN neural network; full coverage; path planning
0 引言
城市轨道交通列车吹扫作业为车辆检修前的必要工序,目前主要采用人工吹扫,作业效率低、强度大、环境差。研究吹扫机器人代替人工作业,可有效解决现有人工吹扫作业存在的问题[1]。因列车车底零部件多,作业空间有限,吹扫机器人需要根据车底零部件布置以及空间限制合理规划吹扫路径,提高车底吹扫作业效率。现有全覆盖路径规划算法多采用将全局路径规划转化为相邻栅格间局部运动决策的思想,可以得到局部最优全覆盖路经,但无法保证所得路径达到全局最优[2]。因此,针对轨道交通车辆吹扫机器人路径规划问题,本文提出了一种基于CHNN神经网络的全覆盖路径规划算法,通过将栅格地图划分为多个形状规则的区域,各子区域间采用CHNN神经网络求解最优连通路径,从而高效完成各工作区域的全覆盖。仿真结果表明,该方法可有效降低路径重复率,避免机器人陷入死区,提高工作效率。
1 基于栅格法的子区域覆盖方法
结合轨道交通车辆吹扫环境特点,本文采用简单可靠且易于实现的栅格法进行环境地图建模[3],采用沿边学习法使机器人沿着边界或邻近边界的障碍物运动,通过传感器实现机器人对工作环境整体轮廓的感知[4]。具体流程为在笛卡儿坐标系中将工作地图按统一规格划分为若干个栅格,根据栅格的位置性质信息赋予不同的置信度,从而确定机器人下一步运动方向。栅格大小的选取一般根据地图大小、障碍物尺寸形状、机器人工作范围以及算法复杂度确定。每个栅格需要对实际位置信息、相对位置信息、滞留信息等进行描述。
1.1 栅格覆盖信息与障碍信息的表达
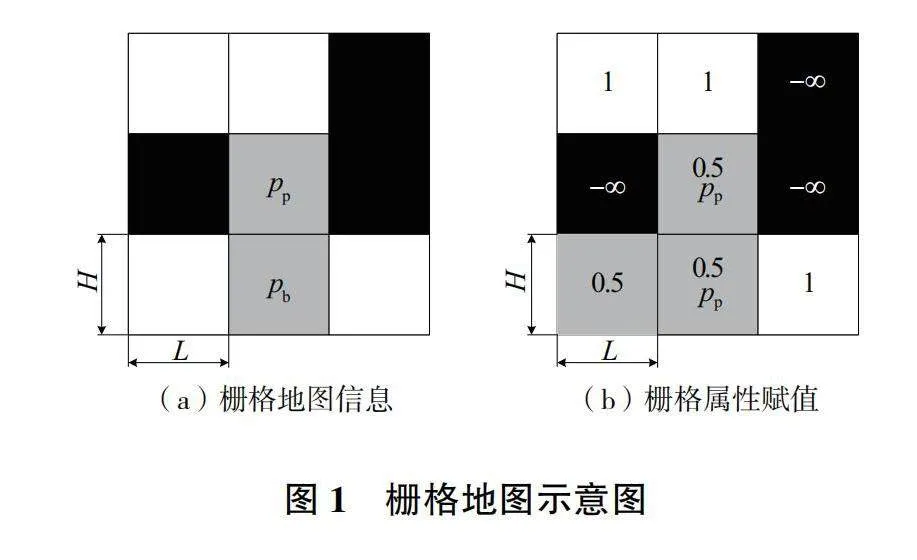
为避免机器人与障碍物发生碰撞,防止机器人对于非重点区域的多次重复遍历,需要对各栅格的覆盖信息与障碍物信息进行赋值。为了避免对非滞留栅格的重复覆盖,对于未覆盖栅格,设定其初始栅格信息为1,每覆盖一次其综合属性值会递减0.5,覆盖次数越多属性值越小,在重复覆盖过程中该栅格被选中的可能性越小;同时为了区分障碍物栅格,将其栅格信息赋值为-∞。假设机器人的工作空间栅格地图如图1(a)所示,其中pp表示机器人当前所处栅格,pb表示机器人上一覆盖栅格,黑色栅格表示障碍物栅格,pp周围栅格表示机器人下一步可能的运动方向,根据栅格地图计算出的栅格属性信息如图1(b)所示。
1.2 栅格相对位置信息的表达
为了减少吹扫机器人运动过程中频繁转向引起的能量损耗以及机器人反向运动导致规划路径过于复杂,引入描述各栅格与机器人相对位置信息的转向置信函数,如式(1)所示。
式中:Δθ表示预选栅格与机器人当前位置夹角;Δφ表示机器人陷入死区后最近未覆盖栅格与机器人当前位置以及预选栅格之间的夹角,Δθ、Δφ∈[0,π],均可根据机器人栅格坐标求出。 当机器人未陷入死区时,随着机器人转向角度增大,转向置信度值不断减小,机器人总是趋向于朝着偏航角度小的方向运动,远离已覆盖区域的方向,且机器人更偏向于直行;当机器人陷入死区后,转向置信度随机器人下一步运动方向与最近未覆盖栅格之间角度的减小而增大,因此机器人会朝着最近未覆盖栅格的方向运动,可使机器人迅速逃离死区。
当机器人陷入死区后,需要先确定最近未覆盖栅格位置,然后根据转向置信度函数确定机器人逃离死区的路线[5]。最近未覆盖栅格采用环形搜索法确定。以当前死点位置为中心,以当前栅格与未覆盖栅格之间的欧式距离为半径进行搜索,直至找到最近未覆盖栅格位置。吹扫机器人工作时除无障碍遍历工作空间外,还需对车底重点零部件位置进行集中吹扫。因此,将机器人工作空间中重点零部件所在位置设为滞留栅格,机器人途经滞留栅格时,需要停留在当前栅格,更改吹扫速度等参数。栅格i的滞留属性根据参数γi确定。利用栅格法建立二维仿真地图的栅格地图如图2(a)所示,采用(xi,yi,αi,βi,γi)的坐标形式对其各栅格属性进行赋值,如图2(b)所示。其中红色栅格表示起点位置,紫色栅格表示终点位置,绿色栅格表示已覆盖路径,青色栅格表示机器人当前位置(本刊黑白印刷,相关疑问咨询作者)。
1.3 机器人工作空间子区域覆盖方法
子区域分割采用“矩形分解法”,通过竖直与水平两条直线从左到右、从下往上将工作空间分两次划分为独立的子区域。子区域的面积越大,则机器人直线行走可覆盖区域面积越大,需要转弯的次数越少,可间接提高机器人工作效率。对于如图2(a)、图2(b)所示工作空间,采用矩形分解法得到S1—S11共11个子区域,如图2(c)所示。
2 基于CHNN神经网络的路径规划算法
2.1 CHNN网络基本原理
CHNN是一种单层互相全连接的反馈型神经网络,网络中的每个神经元将自己的输出传递进其他神经元,同时接收其他神经元的输入,可模拟神经系统中的神经回路现象[6]。其神经元输入与输出之间的关系:
式中:Xi表示第i个神经元输入;Ii表示第i个神经元的外部输入;ωji表示i、 j神经元之间的权值系数。
由上式可得,每个神经元的输入随时间动态变化,输入大小与网络内部输入以及其他神经元的输出有关。因此整个网络状态随时间动态变化。通常采用能量函数对神经网络的动态稳定性进行观测:
通过设定各神经元间的权值矩阵与神经元的外部输入,将传统优化问题中的约束条件以及目标函数与CHNN能量函数联系起来,保证网络达到稳定时的极值点为待优化问题中的最优解。
基于各神经元之间的全连接关系,将网络结构图进一步展开为环状的全连通图。由此可见,CHNN网络可用于求解全连通图最优路径问题。
2.2 基于CHNN子区域遍历路径优化
本文所述全覆盖路径规划,在对工作空间采用栅格法进行子区域分割后,需对各子区域之间进行遍历。各子区域可视为全连通图,因此可将CHNN网络应用于子区域遍历路径优化,求解步骤如下。
1)建立全连通模型,求解权值矩阵
将矩形分解法得到的子区域采用环形全连接图表示,同时求出各子区域间的距离。吹扫机器人子区域间的距离除栅格距离外,还应考虑机器人转向等问题,因此,建立如式(4)所示子区域间距离求解方法。
式中:Si表示子区域栅格距离;βi表示根据式(1)计算得到的路径中由转向引起的总置信值;ω1、ω2分别表示对应的权重系数,且二者和为1;T表示覆盖次数。得到各子区域间的相对距离后,需要求解起点区域与终点区域间经过每个区域仅一次的最短路径。采用关联矩阵来标志不同区域的遍历顺序。
2)设置目标函数与约束条件
得到关联矩阵后,需要对关联矩阵元素进行约束,保证每个子区域只覆盖一次,同时为保证对所有区域的完全遍历,矩阵中所有元素之和需为区域数目。设定如下的约束函数:
式中:α、β、γ均为非负系数;m、n分别表示不同的区域;k、t分别表示不同遍历次序;Vxk、Vyt均为关联矩阵元素,取值为0与1,表示是否经过该区域。当满足每次仅访问一个区域、每个区域仅遍历一次、总遍历区域数目为N时,该函数取最小值。对求解遍历子区域最短路径问题,目标函数与完成全覆盖遍历总距离相关,如式(6)所示。
式中η为非负系数。目标函数取得最小值时,表示路径代价最小。
3)求解神经网络状态方程
根据约束条件与目标函数,将二者叠加可得到网络能量函数。根据以下方程对神经网络进行迭代求解。
式中f(Umi)为激活函数,根据实际需要进行选取。
2.3 轨道交通车辆吹扫机器人路径规划流程
综上所述,本文采用基于栅格法与CHNN网络优化方法实现吹扫机器人全覆盖路径规划,具体步骤如下:
步骤1,采用沿边学习法获取机器人工作空间轮廓信息,在直角坐标系下建立二维地图;
步骤2,对工作空间地图进行栅格分解,确定各栅格坐标以及机器人运动起点、终点位置;
步骤3,计算各栅格障碍物信息、相对位置信息等,对各栅格赋值;
步骤4,用矩形分解法对工作地图进行分割,建立子工作区域全连通模型,计算各子区域之间的距离D;
步骤5,基于机器人运动优先级和栅格信息对各子区域内栅格进行完全覆盖;
步骤6,采用CHNN对各子区域间的全连通图进行最优遍历路径求解;
步骤7,结合各子区域内栅格全覆盖路径以及子区域之间的遍历路线,确定机器人全覆盖路径规划。
3 仿真试验分析
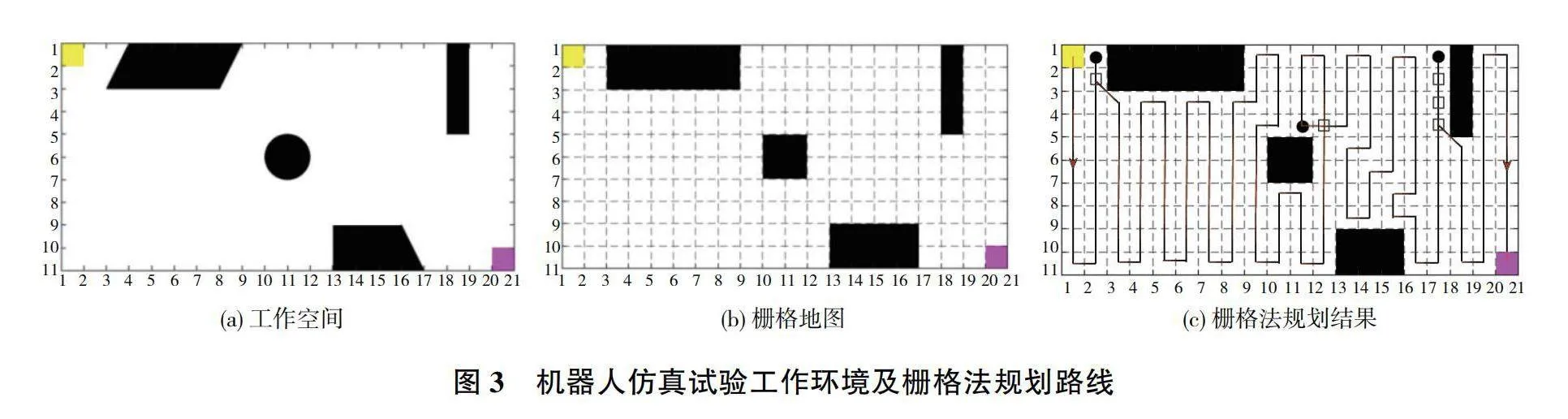
为了验证本文算法在吹扫机器人全覆盖路径规划中的优越性,设定机器人工作空间为40×20,如图3(a)所示。根据机器人以及障碍物的实际尺寸设定每个栅格大小为2×2,因此整个工作空间被划分为20×10的栅格地图。为了研究路径规划算法的效果,将机器人视为质点,可以向四周任意方向运动,所有障碍物都占据至少一个栅格并经规则化处理,通过设定不同障碍物占比模拟不同复杂度的环境。处理后的栅格地图如图3(b)所示。所有仿真试验中,参数K=1,ω1=0.8,ω2=0.2。
将本文算法与仅采用栅格法进行全覆盖路径规划的算法对比,对比指标包括路径质量、区域覆盖率、路径重复率等。其中路径质量通过转弯次数描述,区域覆盖率与路径重复率分别用完成覆盖栅格个数以及重复覆盖栅格个数与工作空间总栅格次数比值确定。区域覆盖率越高,路径重复率越低,算法性能越好。
对图3(a)所示的仿真工作环境,仅采用栅格法进行路径规划,结果如图3(c)所示,机器人对工作空间可达到100%覆盖,同时路径中存在3个死点(图中黑点标注位置),由死点引起的重复栅格数目为5个(图中小方框位置),即路径重复率只有2.87%,路径整体质量较好,不存在路径缠绕问题。
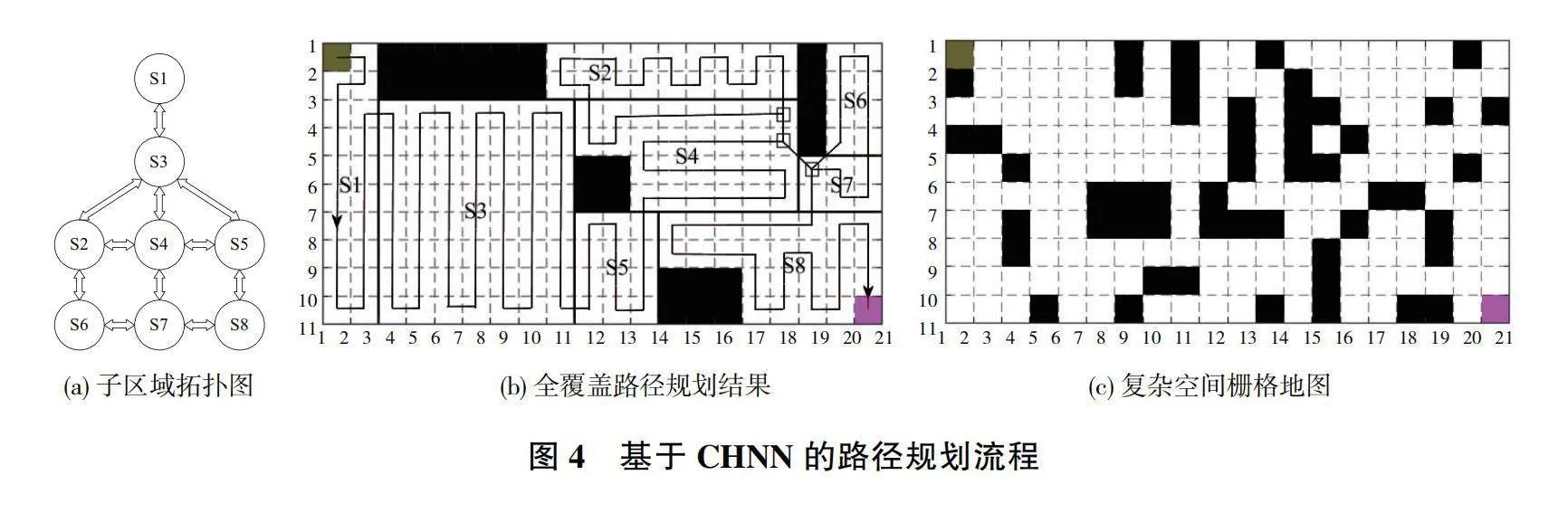
基于CHNN的全覆盖路径规划根据矩形分解法划分得到的子区域建立的全连通图如图4(a)所示,所得路径如图4(b)所示。对比栅格法路径规划结果,CHNN算法得到的路径可达到工作空间100%覆盖,且路径重复率降低为1.72%。同时,基于CHNN规划的路径将机器人的死区逃离问题转化为子区域联通问题,避免了死区逃离过程,提高了工作效率。
为进一步对比两种算法的性能,通过增大工作空间中的障碍物占比,得到如图4(c)所示栅格地图,在此环境下两种算法对比结果如表1所示。由表1可得,工作环境越复杂,基于栅格法的路径规划出现陷入死区次数与路径长度显著增加,机器人行走工作效率大幅降低;融入CHNN进行路径规划在保证同样完全覆盖的前提下,可降低死区次数和路径重复率,间接提高了吹扫机器人的工作效率。
4 结语
本文针对轨道交通车辆吹扫机器人路径规划问题,提出了一种基于CHNN的全覆盖路径规划算法,可以在机器人工作空间内无障碍地实现高效覆盖。通过仿真试验,对比传统路径规划方法,得出以下结论:
1)传统全覆盖路径规划方法与本文所述的CHNN路径规划方法的基本思想均为将全局路径转化为对工作空间各子区域内的完全覆盖以及子区域之间的遍历问题;
2)在障碍物比例高的复杂环境中,本文所述方法相对于仅采用栅格法的路径规划方法,可有效降低路径重复率,同时可消除机器人陷入死区的现象,节省了死区逃离路径选择的时间,间接提高机器人工作效率。
本文研究了轨道交通车辆吹扫机器人全覆盖路径规划算法,并在仿真实验环境下取得了良好的效果,提高了路径规划的效率,后续需通过改变试验参数、微调算法方案等对规划出的路径进行优化,以减少机器人转弯次数,降低能量损耗,进一步提高CHNN全覆盖路经规划算法的适用性。
参考文献:
[1] 赵文涛,朱丹,周小斌,等. 一种集成车底车侧吹扫除尘设备的吹扫装置,中国:CN213892447U[P]. 2021-08-06.
[2] 林韩熙,向丹,欧阳剑,等.移动机器人路径规划算法的研究综述[J].计算机工程与应用,2021,57(18):38-48.
[3] 简毅,高斌,张月.一种室内扫地机器人全遍历路径规划方法研究[J].传感器与微系统,2018,37(1):32-34.
[4] LE A V,NHAN N H K,ELARA MOHAN R. Evolutionary algorithm-based complete coverage path planning for tetriamond tiling robots[J]. Sensors,2020,20(2):445.
[5] 李少雄,张黎明,曹筱欧,等. 面向电动公交车的充电机器人感知与控制[J]. 机械制造与自动化,2021,50(6): 190-194,198.
[6] 田春颖,刘瑜,冯申珅,等. 基于栅格地图的移动机器人完全遍历算法:矩形分解法[J]. 机械工程学报,2004,40(10):56-61.
收稿日期:2022-12-15
猜你喜欢
中国新通信(2016年22期)2017-01-13 09:15:21
经营者(2016年19期)2016-12-23 16:04:26
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
现代营销·学苑版(2016年10期)2016-12-12 11:59:43
电脑知识与技术(2016年26期)2016-11-25 00:00:00
商(2016年33期)2016-11-24 22:07:33
科技视界(2016年20期)2016-09-29 12:00:43
企业导报(2016年14期)2016-07-18 18:42:55
