
基于修正雅可比旋量模型的C形闩机构偏差分析及优化
2024-08-28 00:00:00孔维林高彬马希直
机械制造与自动化 2024年4期













摘 要:使用基于修正雅可比旋量模型的容差分析方法,对引导锁C形闩机构中C形闩的安装位置、运动精度进行分析,与3DCS软件结果进行对比,验证方法适用性。引用机器人运动学相关理论,将静态容差分析拓展到动态容差分析,对C形闩在运动过程中的位置精度进行分析,使用基于Taguchi的容差贡献度、灵敏度对其进行优化分析及容差设计,得出影响较大的因子。
关键词:飞机;修正雅可比旋量模型;引导锁C形闩机构;容差设计;3DCS;Taguchi
中图分类号:TP391.9 文献标志码:B 文章编号:1671-5276(2024)04-0173-04
Deviation Analysis and Optimization of C-shaped Latch Mechanism Based on Modified Jacobian Screw Model
KONG Weilin1, GAO Bin2, MA Xizhi1
(1. National Key Laboratory of Helicopter Transmission Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China; 2. AVIC Chengdu Aircraft Industrial (Group) Co., Ltd., Chengdu 610073, China)
Abstract:By the tolerance analysis method based on the modified Jacobian screw model, analyzes the installation position and motion accuracy of the C-shaped latch in the C-shaped latch mechanism of the guide lock, compares their results with the ones by 3DCS software to verify the applicability of the method. The kinematics theory of the robot is applied to extend the static tolerance analysis to the dynamic tolerance analysis, the position accuracy of the C-shaped latch in the process of motion is analyzed, and the Taguchi based tolerance contribution degree and sensitivity are used to optimize the analysis and tolerance design, obtaining the factors with greater influence.
Keywords:aircraft; modified Jacobian spinor model; guide lock C-bolt mechanism; tolerance design; 3DCS; Taguchi
0 引言
近年来,客运市场增长趋缓,货运市场飞速发展,航空货运不断提高货机运输能力,而客改货飞机的费用比购置全新货机要低得多,这样还可以大大减少货运公司的初期投入。而飞机制造准确度问题涉及设计和制造的各个方面,过去多凭经验处理,存在的问题很多。目前,大部分飞机容差设计依然采用传统方法。传统容差分析是以一维尺寸链为基础,将尺寸链进行泰勒级数展开,从而推导出容差分析模型。这种方法主要适用于静态容差分析。近年来国内外在容差领域取得了一定的成果。LAPERRIERE等[1]提出了一种计算机辅助公差模型——雅可比旋量模型,该方法结合了为计算机辅助公差设计开发的雅可比矩阵和旋量模型的优点,能够在统计情况下进行公差分析和公差综合。DU等[2]通过建立轨迹修正的单层优化模型和一种新的嵌套双层优化模型,完成了舱门机构的尺寸公差设计,有效提高了舱门机构目标点实际运行轨迹的精度。葛磊等[3]通过建立容差仿真分析模型,借用VSA容差分析软件,分析同类零件在不同定位装配方式时零件制造误差对装配控制目标的影响,得到公差库文件,为工艺优化提供依据。陈华[4]将雅可比旋量模型引入到发动机装配体的公差分析中,建立特征旋量在组合公差限制下的矢量变动及其相互间的约束方程,最终实现了对发动机装配体准确可靠的三维公差分析。仇念尧[5]对考虑了孔销浮动的汽车座椅升降机构以及滑轨总成进行容差分析,并引入多种成本模型,建立了多目标公差优化模型,从而实现了综合考虑功能性和成本的汽车座椅骨架系统的容差设计。张晓丹[6]以地铁扶手机构为例,将Taguchi方法应用到地铁扶手机构的稳健优化中,同时建立两种以成本-公差函数为目标的公差稳健优化模型,使用遗传算法进行求解,将计算结果进行对比,发现基于质量损失模型的公差稳健设计更加有效。
本文使用基于修正雅可比旋量模型[7]的容差分析方法,对引导锁C形闩机构中C形闩的安装位置、精度进行分析。在飞机使用过程中,C形闩的安装位置以及运动过程中位置的偏差都会给是否能正确上锁产生影响,因此这里主要研究C形闩在运动过程中的位置偏差。第1节主要说明基于修正雅可比旋量模型的C形闩机构容差模型建立过程及各机构杆件参数。第2节说明具体容差累积函数的求解方法及容差设计。
1 C形闩机构容差模型建立
文献[8]中写道,某机构运动链即为其围绕功能要求部位的容差链,但是在较为复杂的机构中,单一的运动链是没有办法兼顾容差累积方向和容差变动方向,所以需要对容差链进行分析。{(FE1,FE2,…,FEn):FR}可以用来表示某一装配链,其中FE1,FE2,…,FEn可以看成是功能元素对,FR看成是功能要求部位,那么容差链就是这一装配链。
容差链建立的具体过程就是在容差链上的每个功能元素对内建立局部方向坐标系(在功能元素对和功能要求部位之间建立联系,方向上是与全局坐标系保持一致,用来表示容差变动影响)和容差坐标系(建立小位移旋量模型的坐标系,用来表示容差变动方向),解决单一运动链无法解决的问题,同时在功能要求部位建立全局坐标系。
以一个曲柄滑块机构为例,功能元素对应容差坐标系及局部方向坐标系,功能要求部位的全局坐标系建立如图1所示。
图1为曲柄滑块机构的机构运动简图,运动副B处存在间隙容差,D处位置精度就是分析的目标。容差链为AB—BC—CD—D,在A处建立全局坐标系,在B、C、D处建立容差坐标系和局部方向坐标系,从而完成容差表达和容差传递的目标。
在容差坐标内建立的小位移旋量模型需要转换到局部方向坐标系内,而gab=(pab,Rab)可用于表示两个坐标系之间的转换,其中pab为坐标系的原点在另一个坐标系的位置向量,Rab为坐标系相对于另一个坐标系的方向矩阵。而对于旋量来说,其坐标系之间的转换,就需要求解gab的伴随矩阵Ag,ab。
对于所有的功能元素对,因为其中所建立的两坐标系的原点位置保持不变,所以p∧=0。则某小位移旋量模型的转换过程可以用公式表示为
局部方向坐标系建立在每一个功能元素对处,同时也解决了功能元素对内6个虚拟节点的方向在全局坐标系内各不相同的问题。因此,可以用齐次坐标系表示第i个局部方向坐标系在全局方向坐标系下的位置和方向:
对于第i个功能元素对的雅可比矩阵,主要是通过各功能元素对内局部方向坐标系在全局坐标系内的位置和方向确定的,具体为
同时,在机构运动的过程中,(dn0-di0)是一直在变化的,这样构建的雅可比矩阵也会发生变化。假设输入量为θ,则(dn0-di0)=fi(θ),进而需要将雅可比矩阵内关于转动节点的推导进行修正。
那么对于含有n个功能元素对的容差链,其全局容差累计函数为
式中:δlδαT为功能要求部位的小位移旋量,也就是所求的结果;Jη为全局雅可比矩阵;δFE1…δFEnT为局部方向坐标系上的小位移旋量。推导出容差累积函数后,还需要进行灵敏度分析,可以使用基于Taguchi的容差贡献度、灵敏度方法。
Taguchi方法中引入了二次质量损失函数,其预期值表达式为
式中:L(f)为质量损失函数;f为响应函数;k为一常数;μ、σ分别为f的均值和方差;m为目标值。对于式(7),若存在可以将μ调整到目标值的比例因子,则式(7)可以推导为
式(8)为推导出的信噪比公式,而对于不同的设计目标,对信噪比的要求也不一样,想得到最小的目标值,那么信噪比应取最大,则此时信噪比表达式转化为
为进一步研究各容差的灵敏度问题,需要对式(6)进行细化,得到通用容差累积关系式。
在稳健设计中,可以对δij的范围取不同的水平值来进行正交试验,对其进行信噪比分析,降低噪声因子的影响。从机构位置偏差角度来说,机构位置偏差应越小越好,所以目标值越小,则位置偏差的信噪比公式采用式(9)。通过对信噪比及其极差的分析,得到对偏差影响较大的因子,从而重新进行容差设计,使得偏差趋于稳定。
图2为C形闩机构的机构运动简图,这里只建立了部分坐标系,具体坐标系建立过程参照图1,运动副A、B、C、D、E、F处均存在间隙容差,G处位置精度就是此次分析的目标,并且做出以下假设:在运动副中,不存在因接触碰撞而引起的变形并且全部为线接触。分析整个机构可得,两个四杆机构都与C形闩的位置精度有关,研究讨论各组件容差及间隙容差对其位置精度的影响。
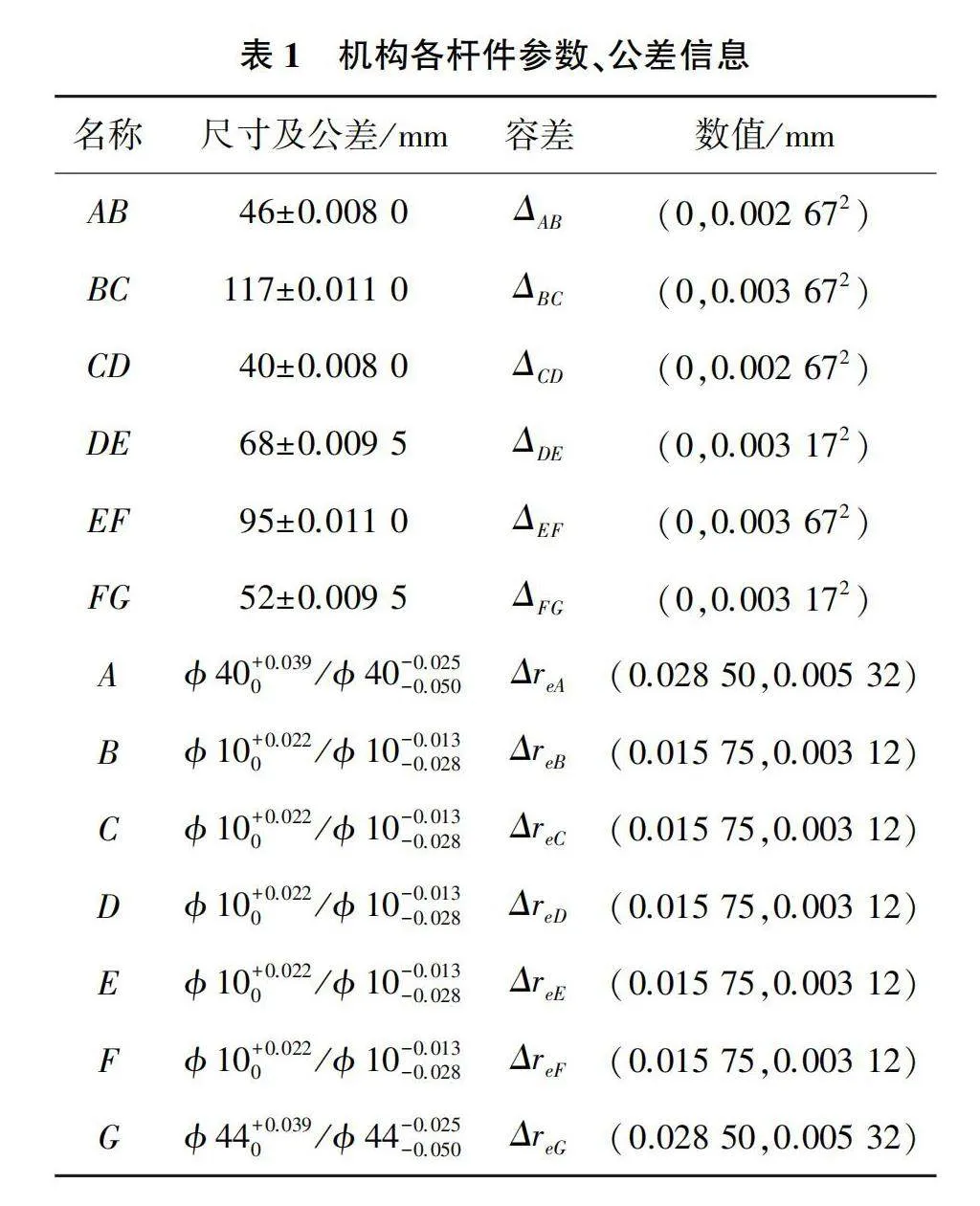
本节对于孔轴配合选用H8/f7,尺寸长度公差采用6级公差,其中机构各杆件参数、公差以及容差设计值如表1所示,尺寸、间隙容差均为不合格率为0.27%的正态分布。
2 C形闩机构容差模型求解及优化
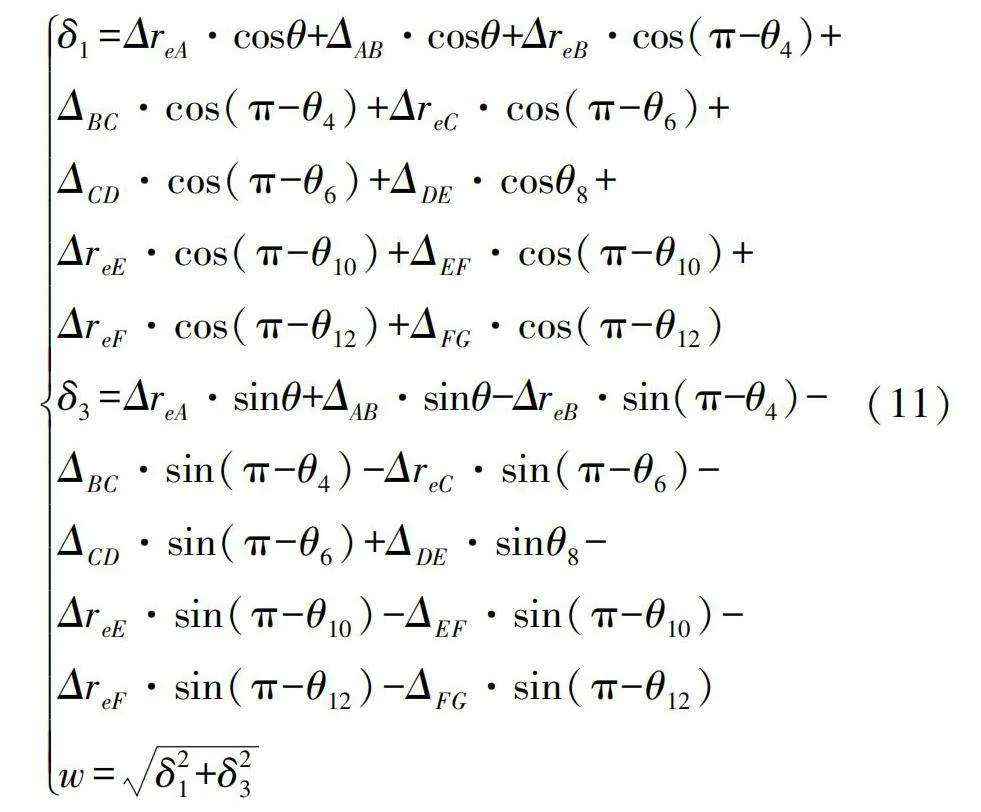
使用所介绍的修正雅可比旋量模型对C形闩机构进行容差分析,建立容差链为AB—BC—CD—DE—EF—FG,确认容差链中各功能元素对和功能要求部位,并在相应位置建立容差坐标系、局部方向坐标系、全局方向坐标系。功能要求部位的位置偏差只考虑x和z方向,对两个方向的数据进行平方和及再开根的处理,得到容差累积函数为:
考虑到引导锁C形闩机构的作动器行程为120°,那么输入变量θ从25°变化到-95°,每隔1°进行一次计算。运用蒙特卡洛法,采用数值模拟的方式抽取随机数,同时按照正态分布规律,抽取随机数的不合格率设置为0.27%,得到各角度的平均偏差量,并将该机构模型导入3DCS中进行仿真,按照蒙特卡洛抽样的方式进行抽样装配并得出结果,将其与基于修正雅可比旋量模型得出的平均偏差数据进行对比,结果如图3所示。
由图3可得,在机构运动过程中,其平均偏差量随着输入角度的变化会有不同程度的波动,在前一段行程中,平均偏差量不断减小,但是在后一段中,有慢慢变大的倾向,可以适当减小运动过程中的偏差,提高运动精度。修正雅可比旋量模型和商业容差软件所得曲线以及变化趋势基本相同,虽然有点偏差,但误差较小,且在可接受范围之内。因此该方法可用于分析此机构。
对得到的容差累积函数进行灵敏度分析,将优化前后的平均偏差量进行对比,结果如图4所示。
从图4可知,使用基于Taguchi的容差贡献度、灵敏度分析方法,对各杆件容差重新设计以后,目标的平均偏差减小约50%,同时在机构运动过程中波动明显变小,稳定性提高。在推导出容差累积函数的前提下,使用基于Taguchi的容差贡献度、灵敏度分析方法可以很好地改善初始容差不足导致的偏差过大的情况。
3 结语
1)使用修正雅可比旋量模型进行容差分析,该方法同样适用于空间机构,将计算结果与基于一维尺寸链理论的商业容差分析软件进行对比,两者所得曲线以及变化趋势基本相同,误差较小,且在可接受范围之内。因此该方法可用于分析此机构。
2)以基于修正雅可比旋量模型的容差分析方法为前提,为后面对机构各容差进行灵敏度分析创造了条件,尤其是对运动副间隙容差。
3)采用基于Taguchi的容差贡献度、灵敏度分析方法对C形闩机构分析及容差设计,优化效果明显,有效地提高C形闩机构的装配精度和运动稳健性,目标的平均偏差减小了约50%,稳定性提高。
参考文献:
[1] LAPERRIERE L, GHIE W, DESROCHERS A. Statistical and deterministic tolerance analysis and synthesis using a unified Jacobian-torsor model[J]. CIRP Annals, 2002, 51(1): 417-420.
[2] DU J B,HUANG Z T,YANG R Z. Optimization of the motion control mechanism of the hatch door of airliner[J]. Structural and Multidisciplinary Optimization,2015,51(5):1173-1186.
[3] 葛磊,陈双霁. 基于装配关系的公差库建立及在容差分析中的应用[J]. 机械制造与自动化,2019,48(5):67-70.
[4] 陈华. 基于雅克比旋量模型的三维公差分析方法研究及在发动机装配中的应用[D]. 上海:上海交通大学,2015.
[5] 仇念尧. 汽车座椅骨架系统功能公差研究[D]. 长春:吉林大学,2022.
[6] 张晓丹. 地铁扶手的稳健优化设计[D]. 大连:大连交通大学,2018.
[7] 张黎. 面向机构精度稳健性的起落架容差设计[D]. 南京:南京航空航天大学,2020.
[8] LAFOND P,LAPERRIERE L. Jacobian-based modeling of dispersions affecting pre-defined functional requirements of mechanical assemblies[C]//Proceedings of the 1999 IEEE International Symposium on Assembly and Task Planning (ISATP′99) (Cat. No. 99TH8470). Porto,Portugal:IEEE,2002:20-25.
收稿日期:2022-12-05
猜你喜欢
高师理科学刊(2020年1期)2020-11-26 05:59:00
佛山科学技术学院学报(自然科学版)(2020年1期)2020-03-12 01:36:52
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
组合机床与自动化加工技术(2017年5期)2017-05-25 00:37:45
综合智慧能源(2017年10期)2017-01-18 22:07:15
高中生·天天向上(2016年10期)2016-11-23 09:02:08
综合智慧能源(2016年1期)2016-02-03 10:04:44
机械制造与自动化(2014年1期)2014-03-01 04:21:48
