
基于粮面形貌的平粮方法研究
2024-08-28 00:00:00范明明臧铁钢郭城王悦
机械制造与自动化 2024年4期
关键词:路径规划









摘 要:为了实现粮仓内粮堆的快速平整,提出一种基于粮面形貌的平粮方法。根据粮面形貌的高度标准差制定粮面平整性指标,并将其作为平粮作业完成的判断依据;为了让平粮机器人能够实现自动化、智能化作业,提出采用基于蚁群算法和多运输调度的粗平路径规划算法及全区域“S”型细平路径规划算法,分别完成粮堆的粗平操作和细平操作。通过仿真环境进行路径规划实验,结果表明了所规划路线的有效性和最优性。
关键词:平整性指标;平粮机器人;路径规划
中图分类号:TP391.9 文献标志码:B 文章编号:1671-5276(2024)04-0161-04
Study on Leveling Grain Method Based on Grain Surface Morphology
FAN Mingming, ZANG Tiegang, GUO Cheng, WANG Yue
(Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China)
Abstract:In order to realize the quick leveling of grain pile in granary, a leveling method based on grain surface morphology is proposed. According to the height standard deviation of grain surface morphology, the grain surface evenness index is formulated and used as the judgment basis for the completion of leveling operation.In order to enable the flat-grain robot to realize automatic and intelligent operation, the rough leveling path planning algorithm based on ant colony algorithm and multi- transportation scheduling and the whole region \"S\" type fine leveling path planning algorithm are proposed to complete the rough leveling operation and fine leveling operation of the grain pile respectively. The path planning experiment is carried out in simulation environment, and the results show that the planned route is effective and optimal.
Keywords:flatness index; flat-grain robot; path planning
0 引言
随着人工智能技术的发展以及“科技兴粮”重大战略的不断推进,对于粮库的建设有了更高的要求,逐渐朝着自动化、智能化的方向发展。在粮仓内的各项作业中,粮面平整无疑是难点之一,因此平粮机器人已成为研究热点。它的应用可以有效地解决人工平粮存在的诸多问题,对提高平粮效率和保护工作人员安全有着重要的意义。
目前,有关平粮机器人路径规划的研究相对较少。对于局部路径规划,蒋林等[1]提出了一种将遗传算法和人工势场法相融合而产生的新算法,该算法可以使机器人能够准确避开障碍物,快速且稳定地到达目标点。许亚[2]提出了一种将人工势场和流体特性相结合的算法,可实现机器人的准确避障。对于全局路径规划,张天瑞等[3]提出了一种面向机器人全局路径规划的改进蚁群算法,可以有效地增强算法的寻优能力以及减少移动路径节点数。曹如月等[4]提出一种基于改进A*算法和Bezier曲线的路径规划算法,实现了全局路径寻优和拐角优化。
总之,上述研究主要针对平地机器人,而对悬浮式机器人的路径规划研究尚属空白。本文在现有的研究基础上,设计了一种基于粮面形貌的悬浮式平粮方法。该方法根据粮面形貌的高度信息制定了平整度指标,将其作为平粮结束的判断依据,实现自动化平粮作业。为了实现粮面的快速平整以及保障平粮质量,设计了由粗平操作和细平操作所组成的总体平粮方案,根据不同的平粮要求规划出相应的平粮策略,以最短的路径完成全区域的平粮工作。
1 平粮策略
粮仓内平粮系统的三维模型如图1所示,该系统由轨道、移动装置、桁架式机构、升降装置、平粮装置和扫描反馈装置组成。
1.1 粮面平整性指标制定
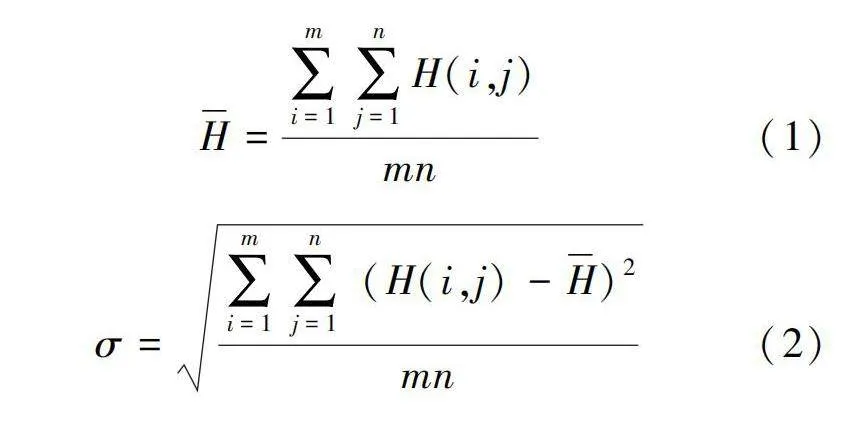
粮面平整度反映了总体的平粮效果,对于粮食的安全存储来说非常关键。目前粮面平整性取决于工作人员的肉眼判断,因此平粮效果会受主观意识的影响。针对该问题,需制定一个判断依据来代替人工判断,从而杜绝主观意识的影响。粮面平整性的好坏取决于粮面各数据点的离散程度,而数据点的离散程度一般选用标准差来描述[5]。
在数据点的三维属性中,只有z轴的高度信息能够反映粮面的平整性,故选用数据点z轴方向的高度标准差来作为粮面平整性的判别依据,数据的标准差计算方式如下:
式中:H—表示粮面的高度平均值;m、n分别表示数据点集合在x、y轴方向上的总数目;H(i,j)表示在坐标(i, j)处数据点z轴方向上的高度;σ表示粮面的高度标准差。
高度标准差σ很好地反映了组内个体间的离散程度,其数值越大,则表明粮面平整效果越差;反之粮面平整效果越好。根据实际测试数据可知,当σ超过8mm这一指标时,意味着粮面的平整效果比较差,无法满足平仓要求。因此,将粮面平整性指标σstandard设为8mm,若当前标准差σgt;σstandard,则需要后续平整工作来完善粮面,使其达到审核标准。
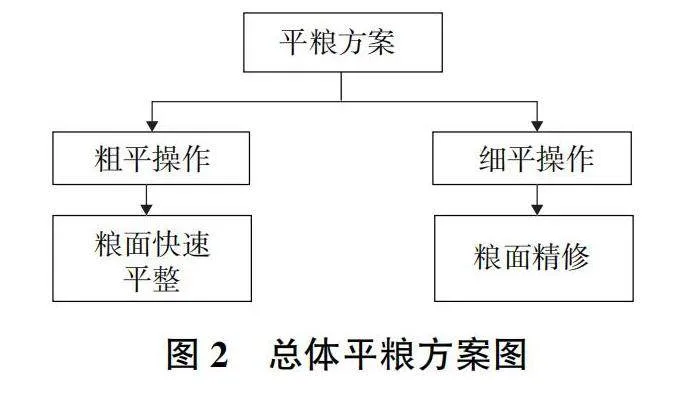
1.2 平粮方案设计
为实现粮面的快速平整以及保障平粮质量,本文采用的平粮方案分为粗平操作和细平操作两部分,总体平粮方案如图2所示。粗平操作的主要目的是实现粮面的快速平整,其采取的总体策略是“削峰填谷”。为加快“削峰填谷”的速度,应先确定粮堆峰和谷的具体位置以及相应的体积大小,然后规划“峰”和“谷”之间的平粮路线。最后进行逐个峰依次销毁来实现粮面的粗平操作。粗平操作完成后,粮面的平整效果一般不满足审核要求,需执行细平操作进行完善。细平操作主要进行全区域的修整作业,以保证平粮质量满足审核要求。
1.3 路径规划
1)基于蚁群算法和多运输调度的粗平操作
粗平操作采取“削峰填谷”的策略,其中涉及峰和谷之间及峰和峰之间的路径规划。规划过程如下。
a)确定粮堆峰和谷的具体位置
首先通过采集的数据信息计算粮仓的总体积Vz,由于粮面平整后粮层高度近似一致,此时粮仓内粮食的分布呈现为一个实体矩形。矩形体积的计算公式如下:
式中:a、b均为已知量,分别表示粮仓的长和宽,则平整后粮层高度的计算公式如下:
由式(4)可知粮面平整后的高度平均值,然后以Z=h绘制等高平面,根据与等高面之间的相对位置关系来确定峰和谷的分布情况,并计算它们的体积。
b)多运输调度规划
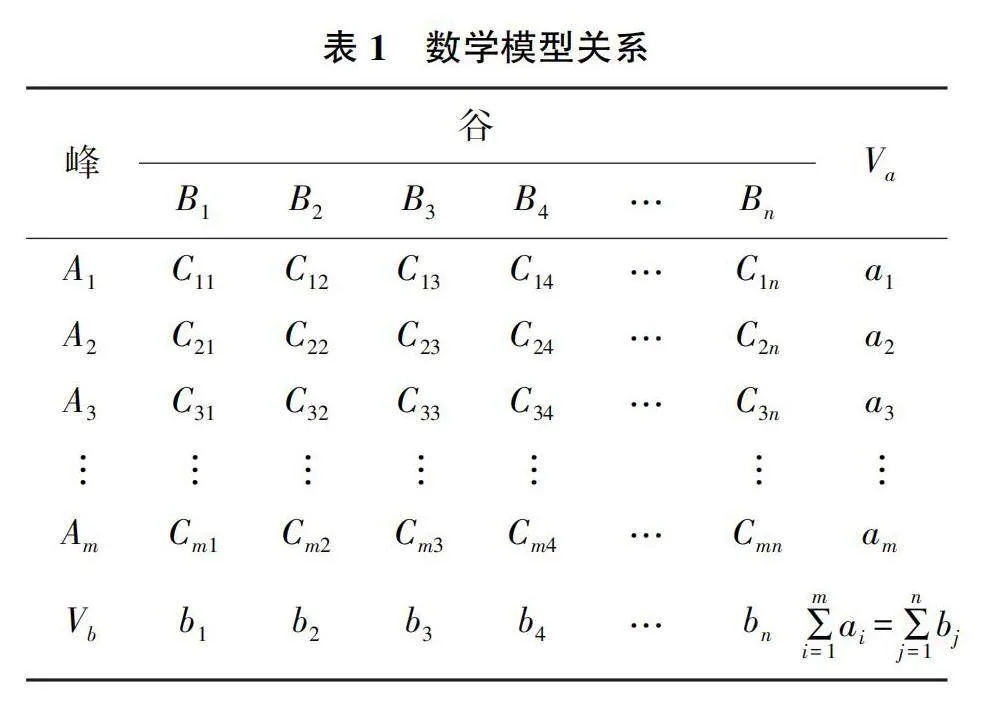
本文采用多运输调度算法来建立数学模型,求解峰和谷之间最优的平粮路线。建立的数学模型关系如表1所示。
表1中:Ai表示第i个峰;ai表示高于等高面的体积;Bj表示第j个谷;bj表示低于等高面的体积;Cij表示Ai和Bj之间的曼哈顿距离,计算公式如下:
式中:(Aix,Aiy)表示第i个峰的平面坐标;(Bix,Biy)表示第j个谷的平面坐标。
因为峰的总体积等于谷的总体积,故粗平操作的平粮过程等价于平衡运输问题。其中将峰和谷分别比作生产地、销售地;峰和谷的体积分别比作生产量、销售量。平粮效率与规划路线的总长度有关,其总路径越长,效率则越低;反之,效率则越高。因此,将两点之间的曼哈顿距离比作两地之间的调用费用。设峰Ai运到谷Bj的体积为Vij个单位,则线性规划模型如下:
由式(6)和式(7)可知,T为路径规划的目标值。T值越小,则表明规划效果越好;反之,效果越差。求解步骤是:①确定初始基可行解;②判断当前解是否为最优解;③调整方案,继续求解;④重复②和③,直到得到最优解为止。
c)基于蚁群算法的路径规划
由于采用逐个峰依次销毁的策略来实现粮面的粗平操作,因此峰和峰之间也存在路径规划问题。本文采取基于蚁群算法来求解峰和峰之间的最优路径。蚁群算法[6]的实现过程如下:
①初始化,假设有m只蚂蚁从最大峰的位置出发,并将每只蚂蚁的禁忌表Table(i,1)设为当前位置,表示该位置当前已访问,后续则不能再访问,初始化最大迭代次数n及初始次数i;
②根据各路径上的信息素选择下一个落脚点,并将该点的位置加入禁忌表中;
③当禁忌表中的元素总数量等于峰的总数时,表示该路径是一个可行解,然后将迭代次数i加1及更新路径信息素,再继续从起点出发,重新搜索路径;
④当迭代次数i大于最大迭代次数n时,则结束搜索。
2)全区域的细平操作
当粗平操作结束后,粮面总体的平整度未达到审核标准,需要后期的细平整操作来完善粮面的平整度。根据实际情况分析,细平操作规划的路线需满足以下要求:
①行进路线需要遍及整个粮仓区域,从而完成整个区域的粮面精修;
②为提升平粮效率,全区域的行进路线应尽量减少路线交叉。
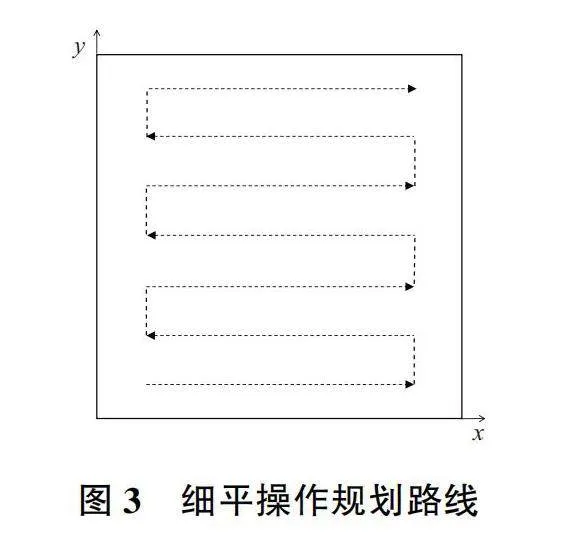
考虑到以上两点要求及粮仓的内部形状,因此平粮机器人在进行细平操作时,主要由横向行走和纵向转弯两个行为组成,故采用全区域“S”型算法来规划细平操作路径,规划路线如图3所示。
2 仿真实验与分析
2.1 实验模型构建
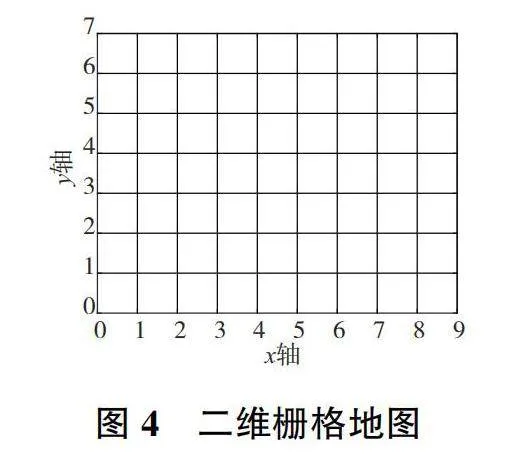
经典的地图建模方法有栅格法、几何法、可视图法[7]等,栅格法相较于其他几种方法,表达更为简单且易于实现,故采用栅格法[8]来构建环境。本文的实验环境为9×7的二维栅格地图,如图4所示。整个区域被划分为若干个小方格,其中每个小方格表示峰或谷,机器人被简化为一个质点,用圆点表示。
2.2 仿真结果
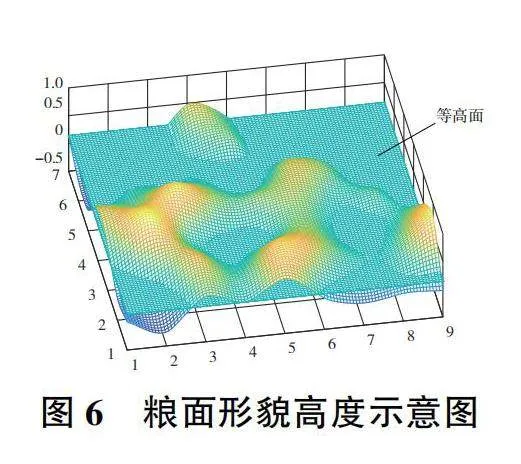
根据采集的粮面数据,绘制出相应的粮面形貌,如图5所示。
由图5可知,粮堆表面明显存在凸起和凹陷区域,因此需制定平仓策略来实现粮面平整。先根据式(4)求解粮面平整后的高度h,然后以Z = h绘制等高面,如图6所示。再通过比较小方块与等高面的相对位置,从而确定峰和谷的位置。求解结果如图7所示,其中深色区域表示峰,浅色区域表示谷。
由图7可知,粮仓内峰和谷的分布情况。通过计算求解获取最大峰的坐标信息,并将其作为起始点,再利用蚁群算法进行路径规划,求解结果如图8、图9所示。
由图8可知,机器人沿着规划路线行进,可逐个销毁粮仓内的所有峰,从而实现粮仓的粗平操作,结果证实了规划路线的有效性和正确性;同时根据图9可知,本文算法迭代至18次时达到收敛,规划路线的总距离为33.657,结果证明了规划路径的最优性。
3 结语
本文介绍了粮面平整性的评价模型,该评价模型可代替人工来检测粮面的平整状态,有效避免粮面平整性受主观意识影响且有利于提高粮面平整质量,是一种比较好的判别方法;同时提出了由粗平操作和细平操作所组成的总体平粮方案,可有效地提高工作效率及平粮质量。其中采用基于蚁群算法和多运输调度的粗平算法及全区域“S”型细平路径规划算法来完成粮仓的平整工作。最后通过仿真验证了所提出平粮方法的正确性和合理性,为实现粮面的快速平整提供了重要的理论支持。
参考文献:
[1] 蒋林,刘晓磊,赵慧,等. 基于遗传改进人工势场法的全区域平粮机器人路径规划[J]. 中国农机化学报,2015,36(5):220-226,243.
[2] 许亚. 基于改进的人工势能场的移动机器人路径规划研究[J]. 科技展望,2016,26(33):77-78.
[3] 张天瑞,吴宝库,周福强. 面向机器人全局路径规划的改进蚁群算法研究[J]. 计算机工程与应用,2022,58(1): 282-291.
[4] 曹如月,张振乾,李世超,等.基于改进A*算法和Bezier曲线的多机协同全局路径规划[J].农业机械学报,2021,52(增刊1):548-554.
[5] 陈冬冬. 基于三维建模的精确抛粮方法研究[D]. 成都:电子科技大学,2022.
[6] ZHANG Y W,LI H,HAN X Z. A heuristic path planning method based on the potential field using probability theory[J]. Journal of Computational and Theoretical Nanoscience,2016,13(11):8088-8100.
[7] SONGB Y,WANG Z D,SHENG L. A new genetic algorithm approach to smooth path planning for mobile robots[J]. Assembly Automation,2016,36(2):138-145.
[8] 杨萍,赵珍,郑海霞. 基于改进蚁群算法的移动机器人全局路径规划方法研究[J]. 机械制造与自动化,2017,46(6): 155-157,192.
收稿日期:2022-12-14
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:28:10
中国新通信(2016年22期)2017-01-13 09:15:21
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年20期)2016-09-29 12:00:43
电脑知识与技术(2016年17期)2016-07-23 20:25:51
电脑知识与技术(2016年13期)2016-06-29 20:13:01
中国科技博览(2016年3期)2016-04-25 17:11:10
