
耙吸式挖泥船可视化态势感知系统设计
2024-08-09 00:00:00于长亮王凯霍占峰苗士勇罗大伟杨超宇
航海 2024年4期







摘 要:挖泥船在土木工程中广泛应用,然而,当前挖泥船作业存在的问题和挑战需要更先进的监测和感知系统来提高其操作效率和安全性。本研究创造性地提出了“全覆盖、全天候、全过程、全共享”的技术要求,不仅解决船舶航行时的辅助瞭望和安全预警的需求,也为智能航行的终极目标自主驾驶奠定了基础,实现对挖泥船运行态势的实时监测和全面分析。
关键词:挖泥船;可视化;态势感知;系统设计;传感器技术
中图分类号:U661.43 文献标识码:A
0 引 言
挖泥船在水利、港口和土木工程中的作用不可忽视,被称为“地平线编辑器”,是我国的战略装备[1]。随着挖泥船使用范围和频率的不断扩大和提高,对挖泥船操控安全、疏浚工艺的要求也不断提高。随着近年智能船舶技术的发展,挖泥船也亟待智能系统的加持[2]。本文以“神华浚2”实船为例,研发可视化态势感知系统,实现对挖泥船操作状态的精准监测和综合分析,采用相关先进技术包括:人工智能视觉识别技术、多源数据融合技术、热成像图像处理技术、图像拼接技术、视图重构技术、数字孪生技术等。
1 系统设计方案
船舶可视化态势感知系统以可视化态势感知计算平台为核心,通过深度学习、视觉处理技术以及数据融合技术,融合视频信息与原有数据,提升原有船型智能化水平,有效解决靠离泊安全和航行安全等问题[3]。
1.1 系统原理
系统运用通导设备串口服务模块及视觉数据处理模块对相关传感器信息进行处理,将不同物理介质与通信协议的传感器数据转化为可以用以太网传输的结构化信息数据,如图1所示。
可视化态势感知计算平台接入转化完成的通导数据及摄像头数据,对相关数据进行汇集、分析、处理,并提供辅助决策及分级预警功能。船端显示模块对船员所需要的信息进行可视化、一体化综合显示。
船端存储数据库存储各功能原始数据、分析报表、决策结果以及预警记录。数据库划分历史数据区与实时数据缓存区,供不同功能进行调用,保障数据实时性与完整性。
通讯模组将船端数据上传至云管理平台,云管理平台根据移动终端或岸端显示模块的操作请求,将数据、报表、预警等信息发送至各远程终端。
1.2 软件架构
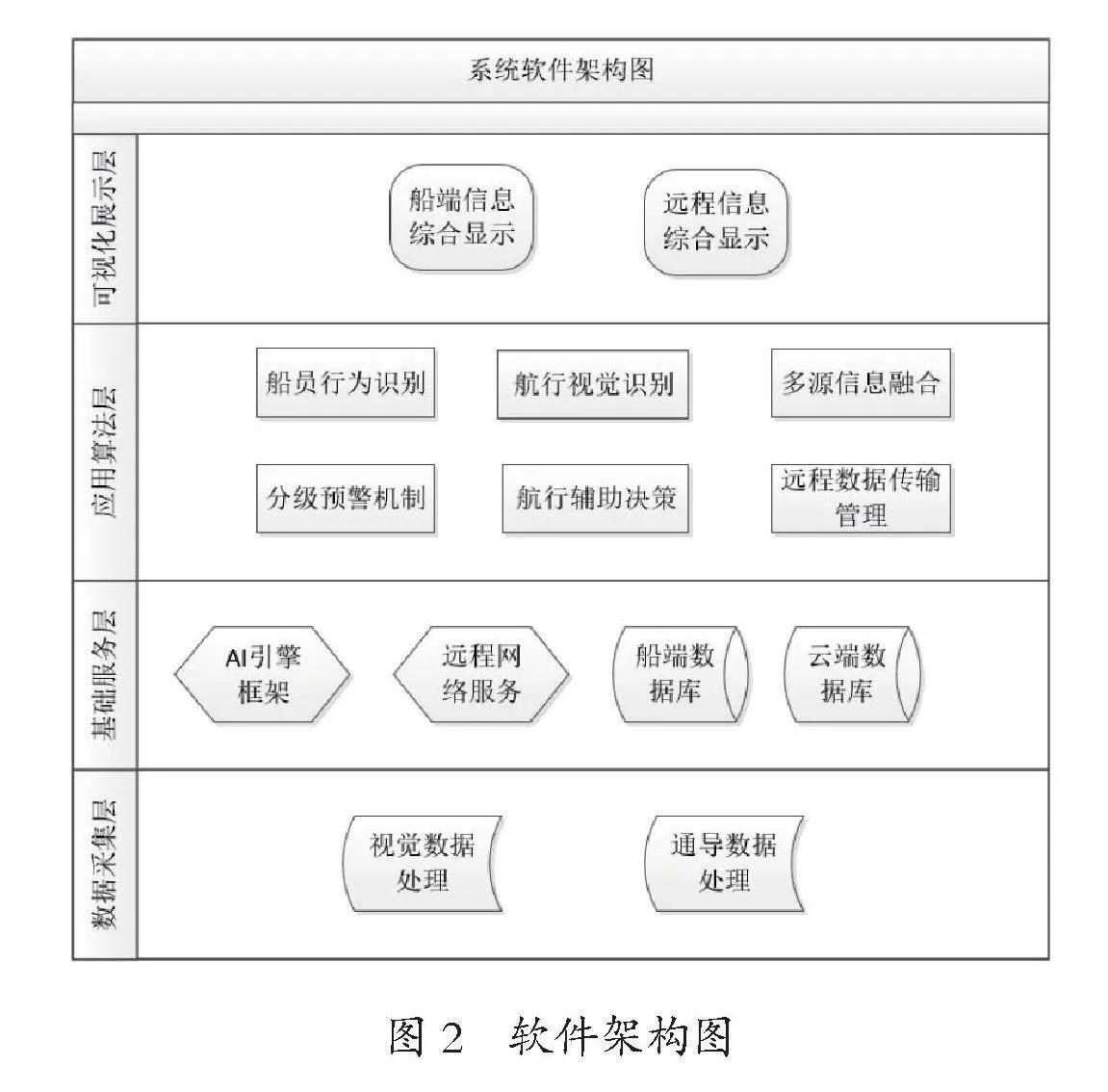
系统软件分为数据采集层、基础服务层、应用算法层、可视化展示层四个部分。数据处理层主要对各传感器数据进行处理,将数据转化为通用格式,供上层软件模块调用。基础服务层提供基础软件服务,包括AI引擎框架、船端数据库。应用算法层包含各功能应用处理程序以及相关算法,包含视觉识别、多源信息融合、分级预警算法等,应用算法层完成所有智能助航系统相关功能。可视化展示层包含船端信息综合显示及运城信息综合显示,运用合理人机交互设计,保证用户可以方便高效地查看各项数据信息,如图2所示。
2 关键技术分析
2.1 航行安全辅助
系统拥有大视角的可视化航道安全辅助功能,可识别航行的船只及其他障碍物,融合电子海图、雷达、AIS、GPS等传感器,感知障碍物、航速、航向等重要信息,提供视觉盲区覆盖、视觉增强等功能,辅助船员瞭望,降低船员劳动强度,提升航行安全[4],见图3。
2.1.1大视角/全景显示
采用大视角航道安全预警摄像头组合,可展现船舶前后左右所有方位的航行视野,可进行视频拼接,识别范围可达2 n mile。
2.1.2视觉识别
通过视觉实时识别视野范围内的目标物并检测距离、速度等信息,识别后在画面上标出目标物。可探测海上近处无法从船用雷达及AIS扫描到的小目标,如海上临时出现的漂浮物、无AIS设备的小型渔船等。
2.1.3电子海图、雷达、AIS、GPS融合
融合电子海图、雷达、AIS、GPS,作为视觉感知的补充,可以全面显示目标物的各类信息,包括目标物类型、MMSI、船长、船宽、COG、SOG、CPA、TCPA等重要信息,同时也可以融合海图信息,将等深线、航标灯等标注在图像上。
2.1.4航行安全预警
系统以视觉感知为基础,多传感器融合为辅助,感知水面目标物信息,对目标物轨迹进行预测,同时预测本船航行轨迹,计算危险情景并进行航行安全预警,见图4。
2.2 作业防碰撞
挖泥船作业时需要时刻关注周边情况,主要包含挖泥船与周围障碍物是否会发生碰撞等。
2.2.1作业工况全景显示
运用船舶周围布置的感知设备,通过视频矫正及拼接技术,提供全景拼接图像,清晰展现作业时船舶周围360°的场景,消除视觉盲区[5]。
2.2.2作业防碰撞
为防止挖泥船作业时碰撞到障碍物,在挖泥船周围装上感知设备,保证系统感知可靠性并且可以适应不同远近距离,设置多级电子围栏警戒圈,当触发不同层级的警戒圈时触发声光报警提示,由远及近声音频率增加。防碰撞测量距离值实时显示于视频图像中,展示障碍物最近碰撞点与我船的实时距离。
视觉设备复用靠离泊安全辅助的视觉识别模块,测量大约距离,障碍物靠近一定范围后,启用感知设备,保证测量准确性。
2.3 靠离泊安全辅助
靠离泊安全辅助功能可以在船舶靠离泊过程中为驾驶人员提供真实360°全景影像,靠泊辅助线显示,实时测距、测速功能。消除驾驶员靠泊盲区,提供靠泊安全保障,最大程度降低船舶在靠离泊期间的碰撞风险[6]。
2.3.1靠泊全景显示
在船舶周边布置靠泊辅助摄像头,通过视频矫正及拼接技术,提供船舶周边真实的360°全景影像,清晰展现船舶周围环境,消除视觉盲区。系统输出2D鸟瞰图、3D环视图到显示屏幕,可以使驾驶人员观察到船舶周边动静态物体。
驾驶员可根据自身习惯,在使用过程中调整视频视角,支持3D全景自由视角、2D俯视视角、前向视角、后向视角、左舷靠泊视角、右舷靠泊视角。
2.3.2靠泊辅助线显示
为了更加直观地显示船舶距离岸线以及周围水域的位置,系统在鸟瞰图中显示靠泊距离辅助线。识别与实时计算,提供船艏、船艉实时离岸距离、速度、船舶与码头夹角等靠离泊安全相关数据,见图5。
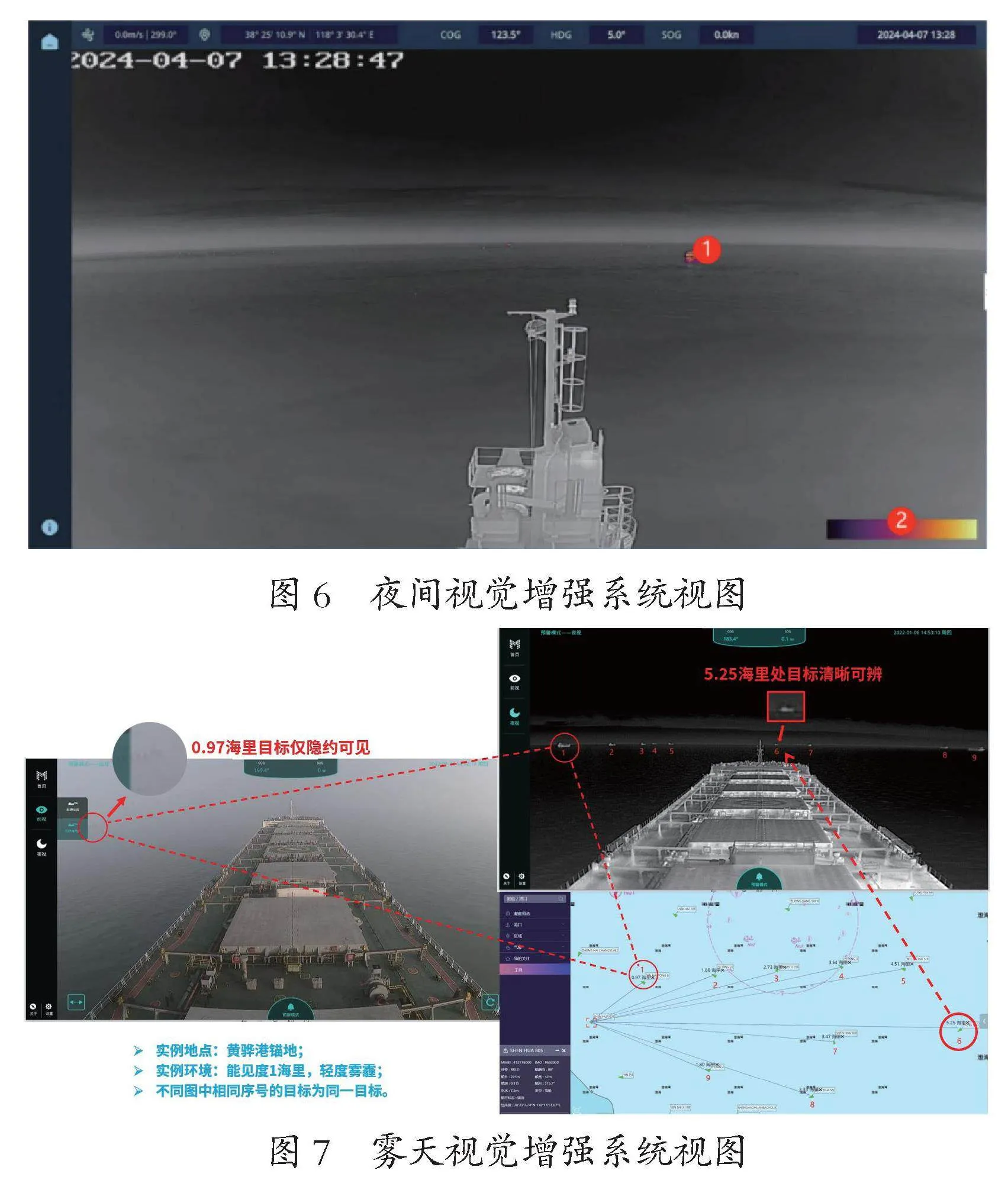
2.4 视觉增强系统
视觉增强系统在薄雾、夜晚灯光极其微弱的情况下帮助船员看清周围情况。系统也在视觉增强辅助模式下重新匹配视觉识别算法,可在该模式下提供视觉识别、预警等航行辅助功能,见图6、图7。
2.5 行为安全管理系统
行为安全管理系统运用视觉模组,基于AI的图像处理技术,通过合规操作行为深度学习,可自动监测驾驶室及泥舱甲板人员行为是否合规。系统可根据不同船舶的不同报警需求,对报警阈值进行配置[7]。主要监测行为包括:航行值班看手机、航行值班打瞌睡、航行值班坐椅操船、航行走动瞭望、值班人员脱岗、值班船员跌倒或突发疾病、故意调开摄像头及关闭监控设备、驾驶室值班正规着装、泥舱甲板工作人员正规着装等,见图8。
2.5.1远程监控与视频显示
系统包含远程终端显示软件,岸端人员可在链路畅通及权限允许的情况下实时查看船只舱内视频画面,紧急报警情况弹窗提醒。
2.5.2违规行为取证
对违规行为进行录像或拍照取证,抓拍的视频或图片符合制定违章标准的5要素,即:1.违章船名及区域;2.违章行为;3.违章时间;4.违章照片体现的全过程位移;5.图片编号。
2.5.3数据库构建
系统为航运公司船员管理提供数据支撑,统计每年度各违规行为频率、累计违规次数等信息,为航运公司在船员管理方面的各项工作提供决策依据,见图9。
2.6 可视化船岸互通系统
系统可将船员行为检测结果与航行安全预警结果进行结合,提供更具安全性及有效性安全监测与预警。系统对船外危险情况及船内人员疏忽进行全方位综合判别,并采用分级智能危险预警机制,船舶管理人员可根据需要设定危险预警等级,系统将自动按照预设的预警等级提醒不同层级的相关人员采取相应的措施[8]。
2.6.1船岸分级预警
预警等级一般分为:驾舱预警、船长预警、岸端预警。系统首先运用语音方式通知驾驶舱内船员;如果船员没有反应,系统将报警发送至船长;如果船长仍然未采取措施,系统将通知岸端航运公司。
2.6.2紧急视频抓拍及传输
在客户定义的紧急情况下通过事件触发机制抓拍视频或图像,通过有限的带宽网络进行发送,在达到监测效果的前提下降低传输流量。
系统可运用船上存储器存储1个月的视频,系统运用压缩技术,能够在最低2Mbps的带宽下传输1080P视频流,最低1Mbps的带宽下传输720P的视频流。
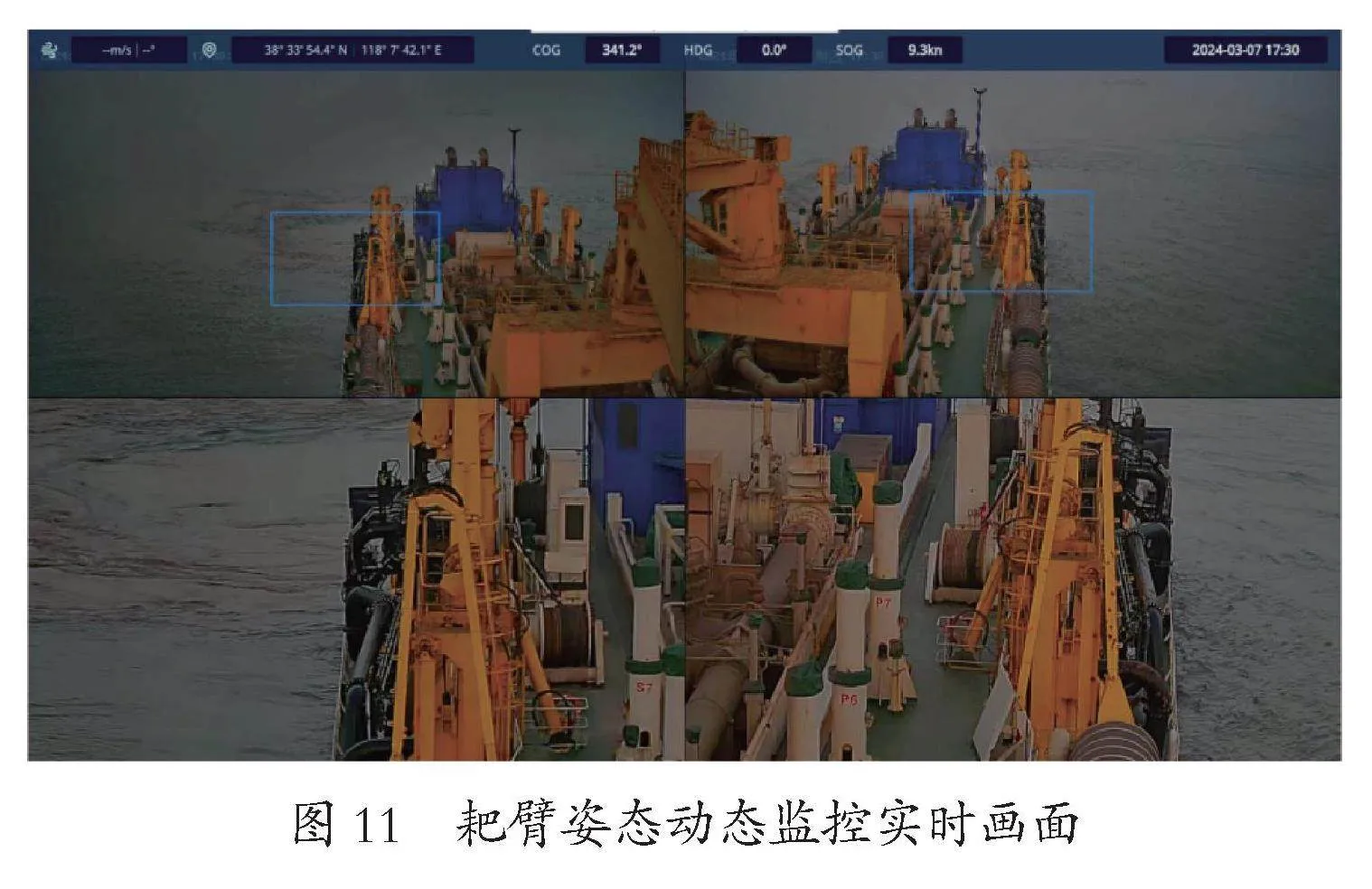
2.7 耙臂姿态监控
耙臂姿态关系到耙吸式挖泥船的挖掘效率和耙臂机具的安全性,需要实时监控其位置与角度[9]。在适当位置布设摄像头,采集耙臂船上和水下动态运动图像,通过智能化网络分析和预测耙臂动态安全位置,实时生成耙臂安全位置预警图像,在耙臂出现极限位置或者危险速度时提出警告并联动急停控制[10]。耙臂姿态动态监控实时画面见图11。
3 系统硬件布置
系统硬件主要包括AI专用可视化计算硬件平台、专用通讯模组、航行安全预警感知模块、作业防碰撞感知艏模块、行为识别模块、水下感知模块、专用存储模块、数据交换处理模块、终端显示模块及专用支架、不间断供电单元等。主要布置在船舶罗经甲板、驾驶甲板、驾驶室、船舱和船尾等地点。另外驾控台中AIS/GPS、电罗经、电子海图和海事雷达需要配置连接到串口服务器。
4 结论与展望
本系统软硬件结合,可以实现“全覆盖、全天候、全过程、全共享”的挖泥船智能化态势感知能力,能够有效提高其操作效率和安全性。系统的技术创新点包括传感器集成、数据处理、图像识别增强等方面,也为整个智能船舶的研究提供一定参考。本系统也可以接入传统船舶交通管理系统(Vessel Traffic Services,VTS),对VTS智能化系统提供技术支持,推动智慧航运的发展[11]。
从实际推广应用来看,该系统可以在现有挖泥船上进行无缝集成,便于在现有控制系统上进行安装部署,可以快速实现现有耙吸挖泥船的智能化升级改造,为疏浚工程的提供安全保障,对于耙吸挖泥船新造船的应用示范、旧船的升级改造具有广泛的推广价值。
参考文献
[1] 郭烨.耙吸挖泥船智能化疏浚控制系统[J].机电设备,2021,38(2):16-19.
[2] 罗刚,冯志勇,陈定等.大型自航绞吸挖泥船智能化集成控制系统[J].中国港湾建设,2016,36(9):12-16.
[3] 雷进宇,初秀民,蒋仲廉等.基于可视分析的船舶航行态势感知系统设计[J].中国航海,2018,41(3):47-52.
[4] 何国文.基于机器视觉的船舶智能航行主动安全辅助技术及系统建构方法[D].青岛科技大学,2022.
[5] 曹征宇,刘芳,孙彦琰.一种基于深度学习视觉感知的辅助靠泊系统[J].船电技术,2024,44(1):53-57.
[6] 朱静波,李孟丽,沈杰等.智能停泊系统在客滚船上的应用[J].船舶标准化工程师,2024,57(1):29-31.
[7] 陈嘉鸣,刘克中,陈默子等.基于信道状态信息的船舶驾驶员值班行为识别方法[J].大连海事大学学报,2020,46(3):68-75.
[8] 张文君.智能船舶航行风险评价与管控策略研究[D].大连海事大学,2023.
[9] 刘凯锋,焦鹏.基于自适应神经模糊控制的耙臂角度控制方法[J].中国港湾建设,2022,42(6):71-76.
[10] 张红升,周昭旭,何彦行.耙吸挖泥船耙管姿态全自动自适应控制技术研究与应用[J].中国港湾建设,2022,42(1):72-76.
[11] 雷进宇,初秀民,蒋仲廉等.基于可视分析的船舶航行态势感知系统设计[J].中国航海,2018,41(3):47-52.
作者简介:
于长亮,高级工程师,硕士研究生,研究方向为船机设备管理
