智能网联试验场环岛智慧管控策略应用研究
2024-07-05 11:01:01潘新福欧阳涛
时代汽车 2024年12期
潘新福 欧阳涛

摘 要:文章通过分析智能网联试验场环岛测试场景车辆到达模型,研究了环岛信号控制的三种模式,建立了智慧管控策略信号配时模型,运用目标函数最优解的方法,得出单一信号控制、左转两部信号控制及左拐独立信号控制环岛的通行能力。研究结果表明,在车流量较大时,左转两部信号控制及左拐独立信号控制的配时方案能够显著解决环岛拥堵问题,证明了环形交叉口信号控制策略的有效性。
关键词:智慧管控 环岛 控制模式 信号配时
1 前言
在智能网联试验场中,我们需要对交叉口进行信号控制,以提高交叉口的通行能力。在信号控制环形交叉口中,实现了通过实时的交通流量数据,结合信号配时方案来分配入环和环内车辆的通行权,使得不同流向的车流按照时间次序有序通过交叉口,提高通行能力。交通工程的实践结果表明,相较于普通环形交叉口,对环形交叉口实施信号控制可以提高交叉口的通行能力。
因此,通过合理的信号配时方案,优化信号控制环形交叉口,以实现更好的通行能力。这种改进是为了确保交叉口的通行能力能够更好地适应交通需求的持续增长。
2 试验场交通运行组织环岛车辆到达模型
根据车辆在环形交叉口运行的特点,可以分析交通流的三个主要方面:车辆到达特性、车辆离去特性及交叉口转向的车辆排队特性。
2.1 车辆到达特性
到达特性是车辆到达交叉口的离散性分布规律,常用来描述车辆到达的是泊松分布、二项分布以及负二项分布[1]。
2.2 车辆离去特性
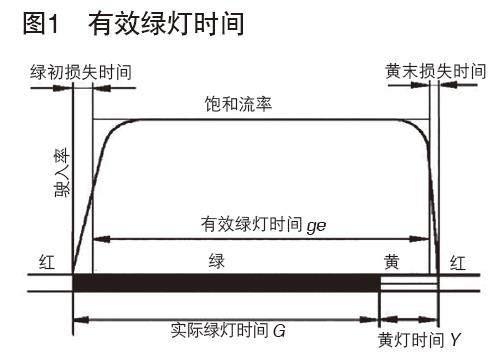
车辆离去特性是车辆获得通行权后离开交叉口入口的特性。车辆在一个绿灯周期内进入路口的等待时间如图1所示。
从绿灯相位开始,车辆驶入环形交叉口的速度会逐渐增长,导致一段时间内的损失,称为绿初损失时间。
2.3 交叉口转向的车辆排队特性
环岛交通流驶向各方向的特性如图2所示。
不同转向的车流在环形交叉口进行合流,通常情况下,右转的车在外车道,直行以及左转的车在中间车道或内车道绕行。当环形交叉口拥挤时,右转车辆有最高的通行权,直行和左转车辆排队等待。
3 环岛信号控制模式
环形交叉口的信号控制有多种类型,例如单一信号控制、左转两步信号控制以及左拐独立控制。在不同的车流量下,选择不同的控制类型。
3.1 单一信号控制
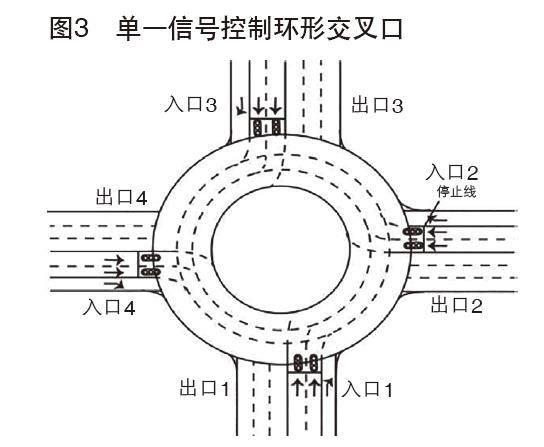
它通过一个信号灯来指示车辆何时进入环形交叉口。单一信号控制环形交叉口可以提供交通流量的有序控制,减少交通拥堵和事故的发生。它需要驾驶员遵守信号灯指示,合理安排行驶顺序,确保交通的安全和顺畅[2]。
其重要的优点就是可以基本适配任何数量的交叉口。标准环岛信号灯布置如图3所示。通过各入口轮流通行以及协调控制的方式进行控制。
(1)各入口轮流放行
各入口轮流通行是各入口按照特定的顺序获得通行权。
(2)各入口协调控制
在各入口协调控制模式下,可对相互影响较小的入口同时放行,控制方式的相位图如图4所示。
单一信号控制方式并非适合应用于所有环形交叉口,需要考虑场地面积以及交叉口交通量的要求。
3.2 左转两步信号控制
左转两步信号控制方法在环形交叉口的布置形式如图5所示[3]。在左转两步信号控制中,左转车流被分配独立的相位通行时间,这使得左转车辆可以单独进行左转而不与其他车辆发生冲突。因此,左转两步信号控制通常只适用于四入口的环形交叉口。
3.3 左拐独立信号控制
左拐独立信号控制方式下,布置环形交叉口的形式如图6所示。左转车辆不需要绕行环岛,而是直接从中心岛路缘石处左转,所以其仅仅在四个入口的交叉口可以使用[4]。
车辆需要拥有较大的转弯半径才能沿着环形交叉口中心岛左转,从而驶出环形交叉口。因此,为了有效放行左转车辆,中心岛的半径应适度控制,不能过大。这种控制方式适合应用在交叉口通行车辆较多时,在设置信号灯绿灯时长时,应充分考虑左转交通量,以保障左转车辆能够迅速通过交叉口[5]。
4 环形交叉口信号配时模型建立
4.1 单一信号控制环形交叉口信号配时模型
根据信号时长特征设置约束如下:
(1)周期时长约束
在环形交叉口中,当采用各方向依次放行时,一个周期内的绿灯时长和黄灯时长之和,如式1所示。
(2)黄灯时间作为约束条件
一般情况下,驾驶员在通过交叉口的黄灯时长计算包括驾驶员的反应时间和制动时间[6]。黄灯信号周期计算如式2所示。
(3)绿灯时间作为约束条件
每一个信号周期内需保证每一入口都具有放行时间,所以每个周期内的绿灯时长应大于零小于信号周期,如式3所示。
(4)红灯时间作为约束条件
交叉口信号灯相位配时中,红灯时长应小于信号周期。特殊情况下,某一路口需要时刻放行,可将红灯信号时长设为零,所以红灯时间约束如式4所示。
4.2 环岛车辆左转两步控制信号配时模型
环岛车辆左转两步控制信号配时模型目标函数如式5所示。
在标准的四路口环形交叉口中,通常采用左转两步信号控制模式,意味着车辆在通过环形交叉口时,需要经历两次信号灯控制。这样规划的目的是为了区分直行车辆和左转车辆之间的冲突。由于车辆需要受到多次信号控制,需要在环形交叉口内设置更加明显的道路渠化和标志标牌。为了达到这种控制效果,每个信号控制点都需要设置信号灯来指示各个车道的行驶状态。这些信号灯之间需要协同控制以实现各个车道车辆的分离[7]。信号灯布置位置及信号灯编号如图7所示。
为了保证环形交叉口交通流有序通行,各入口信号灯需要协同控制。在标准的环形交叉口中,通常采用左转两步信号控制配时方案。在实际环形交叉口设置信号灯配时方案时,需要根据实际情况对信号灯进行精确配时。
4.3 左拐独立信号控制环岛信号配时模型
左拐独立信号控制环形交叉口的信号灯配时方案目标函数和左转两步信号控制目标函数相同。左拐独立控制要求车辆沿中心岛直接左转,而不是沿中心岛绕行。由于左拐车辆的特殊性,存在其它路口全红时间段,使得后来的车辆和其它入口的车辆在没有冲突的情况下进入环岛。左拐独立控制交叉口信号灯编号如图8所示。
(1)周期时长约束
左拐独立信号控制相邻两个相位车辆行驶方向不同,存在交织情况。所以在其它路口全红时间段内,清除环岛车辆。左拐单独控制信号周期计算公式与其它方式不同,其周期约束条件如式6所示。
(2)绿灯信号时长约束
在进行信号灯相位配时中,需保证每个相位绿灯时长大于零,如式7所示。
(3)红灯信号时长约束
因为左拐独立信号控制配时方案存在其它路口全红时间段,全红时间段一共有四个部分。第一部分是相位一和相位二之间的全红时间段,这段时间内,环形交叉口的所有车辆都停止通行。在最后绿灯周期内进入环形交叉口的车辆需要绕环岛半周,需要一定的时间。第一部分全红时间的计算如式8所示。
第二部分为相位二与相位三之间的全红时间段,是最后驶入环形交叉口的车辆沿中心岛左转一直到驶离环形交叉口的时间,该段全红时间计算如式9所示。
同样,第三部分全红时间段与第一部分全红时间段相同,第四部分全红时间段与第二部分全红时间段相同。
每个信号配时相位中红灯时间应小于信号周期,所以红灯时长约束如式10所示。
5 模型求解方法
MATLAB是美国MathWorks公司出品的商业数学软件,用于数据分析、无线通信、深度学习、图像处理与计算机视觉、信号处理,控制系统等领域。
在研究中,可以将环岛通行能力计算转化为数学模型中求目标函数最小值问题,通过调用MATLAB中的fmincon函数进行求解。这种方法通常能够更有效地解决复杂的优化问题[8]。
求解约束条件下的目标函数最值,fmincon函数的基本语法如下:
x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
其中,x, b, beq, lb,和ub为线性不等式约束的上、下界向量,x0为初始解的猜想,A和Aeq为线性不等式约束和等式约束的系数矩阵,fun为目标函数,nonlcon为非线性约束函数。
6 结论
在SUMO中运行仿真程序,如图9所示。
仿真结果显示,在未安装信号控制设备之前,其通行能力为3030pcu/h。在采用左拐独立信号控制和左拐两步信号控制的信号灯配时技术方案后,相比没有安装信号灯时通行能力提高了21%和25%。简单来讲,在环岛交叉路口采用左拐两步信号灯配时方案在解决该交叉口拥堵问题上表现出较好的效果,提高了通行能力。
结果表明采用信号控制策略,特别是左转两步信号控制和左拐独立信号控制的有效性。这种信号控制策略有望改善交叉口的交通流,减轻拥堵状况,提高通行效率,证明了环形交叉口信号控制策略的有效性。
参考文献:
[1]王东磊,刘锴,安藤良辅.低排放导向的交叉口速度引导策略研究[J].交通运输研究,2016,2(01):31-37.
[2]鹿应荣,许晓彤,丁川,等.车联网环境下信号交叉口车速控制策略[J].交通运输系统工程与信息,2018,18(01):50-58+95.
[3]靳秋思,宋国华,叶蒙蒙,等.车辆通过交叉口的生态驾驶轨迹优化研究[J].安全与环境工程,2015,22(03):75-82.
[4]安实,姚焓东,姜慧夫,等.信号交叉口绿色驾驶车速控制方法[J].交通运输系统工程与信息,2015,15(05):53-59.
[5]李泊霖.不同控制模式下环形交叉口信号配时模型研究[D].长春:吉林大学,2018.
[6]鹿应荣,许晓彤,丁川,等.连续信号交叉口网联自动驾驶车速控制[J].北京航空航天大学学报,2018,44(11):2257-2266.
[7]刘欢,杨雷,邵社刚,等.车路协同环境下信号交叉口速度引导策略[J].重庆交通大学学报(自然科学版),2019,38(12):8-17.
[8]黄仝宇,胡刚,傅惠.基于增量搜索的车辆动态路径规划算法研究[J].西部交通科技,2010(09):84-89.
猜你喜欢
金桥(2022年5期)2022-08-24 01:40:54
汽车与安全(2021年1期)2021-05-18 14:22:38
商场现代化(2016年29期)2016-12-23 00:01:03
商业会计(2016年12期)2016-10-08 01:05:54
中国市场(2016年21期)2016-06-06 04:28:28
中国科技博览(2016年9期)2016-04-25 20:06:46
中国科技博览(2016年7期)2016-04-25 06:16:36
电子技术与软件工程(2015年6期)2015-04-20 17:41:12
黑龙江交通科技(2015年12期)2015-03-21 05:50:40
科学与财富(2014年5期)2014-06-17 00:47:15