
基于机器视觉的医疗服务机器人设计
2024-07-03 09:52:35蒋昕宇俞晓丹刘湘檀文杰陈奕廷邓雨晴
无线互联科技 2024年10期
蒋昕宇 俞晓丹 刘湘 檀文杰 陈奕廷 邓雨晴
摘要:现如今,在人口老龄化的大背景下,服务机器人的研究和发展成为热点。服务机器人作为机器人产业的重要前沿领域,融合了人工智能、传感、网络、视觉等创新技术,为人类生活提供多种服务,帮助人类解决实际生活中的困难,提高了人类的生活质量。文章从医疗服务、医疗技术以及医疗效率3个方面入手,针对现在的医务行情,旨在打造一款基于机器视觉的智能型机器人,缓解人口老龄化带来的社会压力。
关键词:人工智能;服务机器人;机器视觉
中图分类号:TP242文献标志码:A
0 引言
中国是世界上人口最多的国家,随着生育率的下降和医疗条件的改善。截至2023年年底,中国65岁及以上的老龄人口数量约为2.16亿,约占全国人口的15.4%,中国人口老龄化的发展速度还在明显加快。据联合国预测,到2030年,中国65岁及以上人口将达到4亿人,约占全国人口的28%。人口老龄化现象的加剧对我国社会经济、医疗保障等方面带来了巨大的挑战。
1 机器人系统的研究背景
随着年龄的增长,老年人的免疫力会大不如前,相较于其他年龄人群,更容易患上疑难杂症。而老年人在治疗过程中,对药物的需求量较大。随着时间的推移,医疗资源的供不应求也将成为一个重要问题。
研究组针对这一需求收集资料并展开调研。随着科学技术的发展,计算机编程和智能机器人早已渗透到医疗领域中,机器视觉这一技术也随着市场需求的增大不断完善发展。基于机器视觉技术,研究组设计了一款医疗服务机器人。相较于传统机器人,其使用了通用输入/输出口(General Purpose Input Output,GPIO),促进多个硬件之间的连接实现更快、更准确地抓取和行动、数据化的图像识别以及智能避让等一系列动作。研究内容希望为提高医疗效率、缓解资源短缺问题、提升老年人的生活质量和安全性做出贡献。随着该项目的进步、应用和推广,所设计的医疗服务机器人有望在老龄化社会中发挥越来越重要的作用。
2 机器人系统的研究意义
通过引入机器视觉技术,本文设计了能够灵活执行医疗任务的机器人系统,不仅能大幅减轻医务人员的工作压力,还提高了医疗效率。另外,为了实现医疗服务的高精准度,研究组通过机器视觉系统实现对药物的精准辨识和抓取,确保药物安全送达指定位置;在机器人小车的设计中引入了先进的安全测试系统,包括雷达技术、红外线探测等,以检测和规避潜在的障碍物。这一系列的操作将确保机器人在执行任务的过程中适应各种环境,提高整个医疗服务系统的效率和安全性。
3 软硬件共行服务机器人设计意义
基于上述背景,针对当前的环境,研究组运用一种软硬件共行的设计思路以及创新理念,使基于机器视觉的医疗服务机器人更好地服务于大众。
4 基于机器视觉的医疗服务机器人的设计
本设计中的智能医疗机器人利用树莓派视觉小车C5的图像识别功能,设计医疗药品的图像库,通过摄像头拍摄并处理图像的相关信息,实现了药品的自动识别、定位以及分类[1]。在硬件部分,智能机器人主要包括树莓派控制器、电机驱动模块、传感器模块和电源模块。树莓派控制器负责接收指令并控制电机驱动模块和传感器模块。传感器模块中的感知模板和控制模板起着至关重要的作用。感知模板通过多种传感器来感知环境,包括红外线传感器、超声波传感器、摄像头和麦克风等。收集和处理感知模块所得到的数据信息,智能机器人可以实现对其所处环境的自主感知。控制模板主要是根据控制模板所提供的一些数据信息,通过控制电机和灯光等组成的执行器来实现小车的运动控制、转向控制和灯光控制。
为了提高设备的精度,研究组设计了医疗服务机器人的电路。小车的电路设计主要包括电源管理、传感器接口的设计、执行器控制和通信接口等部分。树莓派板载GPIO提供了以电平信号为基础的输入和输出接口,使用树莓派适配板将这些接口映射到通用接口上,即可完成与各个硬件的连接。
软件部分是智能机器人控制的核心,也是该项目的研究重点,主要负责处理传感器数据、决策和控制执行器。研究组使用Python语言编写树莓派的程序,利用GPIO库控制电机驱动模块和传感器模块[2],通过读取传感器的数据,利用程序输出结果判断小车当前的状态,比如在赛道上是前进还是后退,是否有偏离的情况发生,根据预设的算法对小车进行有效的控制。软件部分的准确设计有利于小车的全面及稳定运行功能的实现。
5 机械臂的设计
机械臂包括基座、臂端、关节、夹爪等。基座是机械臂的支撑结构,臂端是机械臂上不同长度的连接杆,关节是连接臂端的转动机构,夹爪用于抓取和放置物体。机械臂通过控制各个关节的转动和臂端的伸缩实现多种动作。在本文设计中,机械臂可以根据目标物体的坐标抓取物体,确定末端执行器的位置和方向,运用所设计的算法计算每个机械臂的关节对应的角度。
基于机器视觉的医疗服务机器人利用逆运动学公式辅助计算机械臂在运动过程中所需要的力或者力矩[3]。逆运动学(Inverse Kinematics)是机器人学和机械臂控制中的一个重要概念。在本实验中,设其末端执行器在笛卡尔坐标系中的期望位置为(x,y,z),且机械臂的每个关节都是旋转关节,其旋转轴相互垂直。逆运动学公式如下:
[\begin{align*}\theta_1 &=\atan2(y, x) \\theta_2 &=\atan2(\sqrt{x^2 y^2} - L_1,z)\end{align*}](1)
其中,(\theta_1)和(\theta_2)是2个关节的角度,(L_1)是第一个关节到末端执行器的长度。这里使用了(\atan2)函数,其返回2个参数比值的反正切值,考虑了2个参数的正负号,从而能够返回4个象限的角度。
6 图像的识别以及处理设计
本文的医疗服务机器人的抓取系统通过树莓派视觉小车实现,整个系统主要包括图像采集、图像处理、物体识别与定位、机器人运动控制等模块。
(1)图像采集:该模块负责采集目标环境的图像信息,这是实现机器视觉的基础;使用多种传感器如红外线、超声波以及高分辨率的摄像头进行图像采集,保证图像清晰、稳定。
(2)图像处理:该模块负责对采集的图像进行处理,包括去噪、增强等操作,以提取目标物体的特征信息。
(3)物体识别与定位:该模块通过模式识别等技术,对处理后的图像进行目标物体的识别和定位;该模块通常使用深度学习等方法,以提高识别的准确率。
(4)机器人运动控制:该模块负责根据物体识别与定位的结果,生成机器人的抓取路径和控制指令;模块需要考虑机器人的物理特性和环境因素,以确保抓取的准确性和安全性。
7 基于机器视觉的医疗服务机器人的测试数据
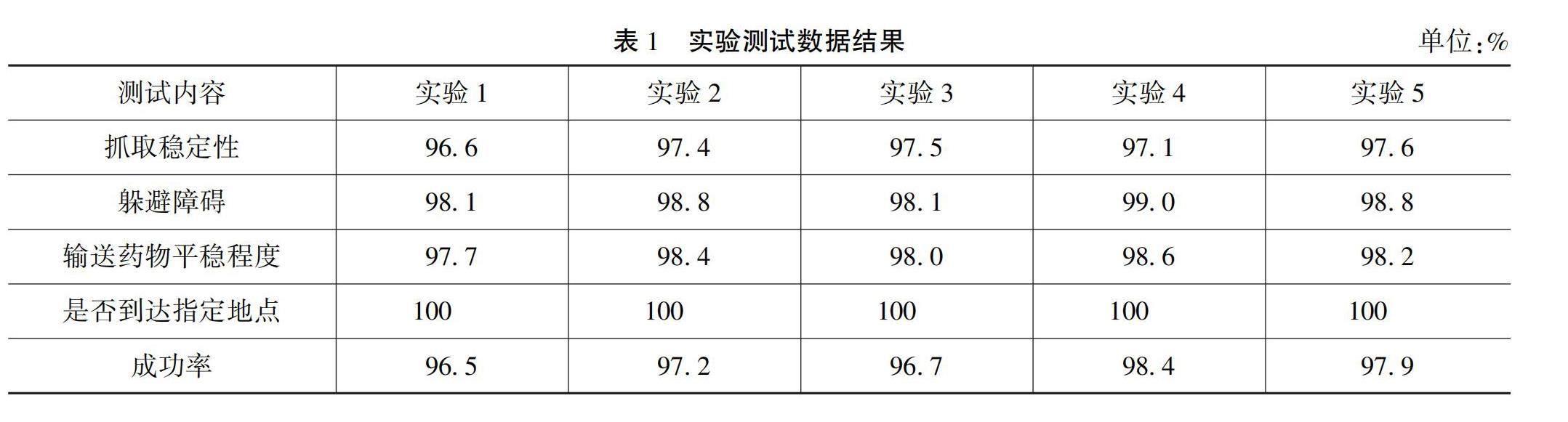
本文通过5个实验对基于机器视觉的医疗服务机器人进行抓取测试,测试内容如下:抓取的稳定性、躲避障碍、输送药物的平稳程度、是否到达指定地点[4]。实验数据表明,机器人的各项测试内容完成度较高,并未出现明显错误,总体平均成功率为97.3%。对基于机器视觉的医疗服务机器人抓取系统的研究,可得到以下结论。
(1)实验确定了基于机器视觉的医疗服务机器人所用到的各项硬件、相关程序与重要参数,所得实验测试结果如表1所示。与传统智能机器人相比,本文所设计的机器人经过数据化处理,深入分析了系统的具体要求,实现了抓取的准确性、高效性和安全性,实用性较高。
(2)针对各板块硬件之间的连接,本文设计的机器人采用GPIO,方便了各硬件之间的连接。
(3)对于图像采集与处理,系统的识别率较好,小车行进较灵活,能有效完成输入指令,控制各类指标在合理范围内[5]。
8 结语
通过引入机器视觉技术,本文设计了能够灵活执行医疗任务的机器人系统,以提高医疗服务的整体效率。机器人能够快速、准确地执行特定的操作,减轻医务人员的负担,从而使其专注于更为复杂和关键的医疗工作。具体优势如下:
(1)所设计的智能机器人可以提高医疗效率和准确性;
(2)为了提高精准医疗服务水平,基于视觉系统的智能机器人能够实现对药物的精准辨识和抓取,确保药物送达指定位置,这不仅有助于减少药物分发的错误率,还能够在医疗服务中提供更为精准的操作,提高患者的医疗体验;
(3)在实验中,本文引入先进的安全测试系统,如雷达技术,以检测和规避潜在的障碍物[6],这将确保机器人在执行任务的过程中能够适应各种环境,提高整个医疗服务系统的安全性;
(4)项目组致力于解决人口老龄化不断加重而产生的医疗服务中遇到的一些瓶颈问题,通过机器视觉和智能控制系统,解决了医疗服务中的相关问题,如在繁忙时段的药物发放等。
结合实际情况来看,所设计的智能机器人在无人操作下达成的目标准确度高达90%。这说明机器人系统的引入能够有效地减轻医务人员在高强度工作环境下的工作压力,提高医疗服务的整体水平。
参考文献
[1]TAYLOR R H. A perspective on medical robotics[J]. Proceedings of the IEEE,2006(9):1652-1664.
[2]谈英姿.大学生机器人竞赛指南(江苏篇)[M].南京:东南大学出版社,2018.
[3]ZHANG X, MA X, ZHOU J P, et al. Summary of Medical Robot Technology Development, 2018 IEEE International Conference on Mechatronics and Automation (ICMA). August 5-8,2018[C]. Chang-chun:IEEE, 2018.
[4]胡洋洋,张文强.医疗服务机器人现状与展望[J].中国发展观察,2016(14):52-53.
[5]陈兵旗.机器视觉技术[M].北京:化学工业出版社,2018.
[6]卢煜.医疗运输机器人及其自适应跟随系统设计与研究[D].上海:上海应用技术大学,2022.
(编辑 沈 强编辑)
Design of medical service robot based on machine vision
Jiang Xinyu, Yu Xiaodan*, Liu Xiang, Tan Wenjie, Chen Yiting, Deng Yuqing
(Nantong Institute of Technology, Nantong 226001, China)
Abstract: Under the background of aging population, the research and development of service robot have become a hot spot at present. As an important frontier field of robot industry, service robot integrates innovative technologies such as artificial intelligence, sensing, network and vision, which provides a variety of services for human life, helps human to solve the difficulties in real life, and improves the quality of human life. This paper starts from three aspects of medical service, medical technology and medical efficiency, aiming at the current medical market, aims to create an intelligent robot based on machine vision to relieve social pressure brought by population aging.
Key words: artificial intelligence; service robot; machine vision
猜你喜欢
西安航空学院学报(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT经理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
电脑知识与技术(2016年28期)2016-12-21 12:13:14
科技视界(2016年26期)2016-12-17 17:31:58
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40
南风窗(2016年19期)2016-09-21 16:51:29
