基于机器视觉的三维重建技术在蔬菜上的应用综述
2024-07-02 11:28:47张铭桂琚俊刘厚诚
江苏农业科学 2024年9期
张铭桂 琚俊 刘厚诚


摘要:随着物联网技术的快速发展,三维重建技术在各行各业中都得到了广泛应用。利用三维重建技术可对蔬菜进行精准株型预估与表型物理数据的重建,可以实现非接触式无损检测,从而提高蔬菜生产效率和经济效益,具有很大的应用潜力。本文重点分析了近年来植物领域基于机器视觉的三维重建技术。首先从主动式三维重建方面,研究了结构光法、三维激光扫描法和飞行时间法等方法。其次,在被动式三维重建方面,探讨了单目视觉法、双目视觉法和多目视觉法等技术。最后,研究了深度学习三维重建方法,即采用端对端深度学习的方式进行三维重建。通过对上述方法的现有研究案例和相互之间的对比,分析了它们在蔬菜三维重建应用中的优点和不足。此外,文章还总结了三维重建技术在蔬菜领域未来发展中的优势和面临的挑战,并针对国内技术现状,提出了在蔬菜无损检测领域的研究趋势和未来的发展方向。
关键词:机器视觉;三维重建技术;蔬菜;无损检测;应用
中图分类号:S126文献标志码:A
文章编号:1002-1302(2024)09-0027-08
蔬菜在人们的日常饮食中扮演着不可或缺的角色,是人类营养的重要来源,具有重要的经济价值。根据国家统计局的数据统计,2021年我国人均蔬菜消耗量达到了109.8 kg[1]。随着人们生活水平的提高和健康意识的增强,对蔬菜品质的要求不断增加[2]。蔬菜的生产及产量的预测是决定农业生产的关键因素,蔬菜生长指标(如高度、叶面积、体积、质量等)的传统测量方法是通过手动取样后的方式来测量,以生菜为例,生菜测量鲜质量需将生菜从栽培板中取出或者在菜地上进行破坏性采摘,在此过程中容易损伤其根系,同时会耗费大量的人工和时间,且测量结果也会因人操作问题而产生影响,因此通过三维重建技术对蔬菜非接触式无损检测的研究具有重要意义。基于机器视觉对蔬菜进行三维模型重建,再结合相关数据进行误差调整,可以精确地估算出蔬菜的高度、体积和质量,实现无损检测。这一技术将有助于提高蔬菜的品质,减少采收、储存和运输过程中的损失,同时提高生产效率和经济效益,对现代化蔬菜产业的发展具有积极意义。
1 三维重建技术
三维重建技术是指通过机器设备或二维图片的处理和分析,将现实中的三维物体或场景重新构建出三维模型的过程[3]。随着计算机视觉和机器学习算法的发展,近年来三维重建已经成为机器人技术、医学成像和体系结构等多个领域的强大工具。在植物研究领域,特别是蔬菜方面,三维重建技术也得到了广泛应用。根据测量对象的不同,蔬菜三维重建可以分为主动式重建和被动式重建[4],以及根据方法不同,又有端到端深度学习的三维重建。
1.1 主动式三维重建
在主动式三维重建中,硬件设备通过发射出特定信号(如红外线、激光雷达等)穿过或经过物体,获取研究对象的三维数据信息。这种技术需要主动测量环境深度以构建三维模型[5]。
1.1.1 结构光法
结构光法[6]是一种主动成像技术,在近几十年的技术发展下,结构光投影的三维形态测量技术在计算机视觉和光学测量领域得到了迅速发展[7-8],在植物表型三维重建领域,光栅投影技术被广泛应用。该技术通过将特殊光栅或由多条条纹、任意条纹组成的图案投射到物体上,从而获取物体的深度数据(图1)。结构光法以非破坏性的方式获取颜色、纹理、形状和尺寸等多种物理属性[9],为精确3D表征提供了一种解决方案。该技术具有速度快、精度高、鲁棒性好等优点[10-11],并广泛应用于各个领域。然而,在蔬菜领域,由于植株叶片较多,且叶片普遍存在重叠的情况,这容易降低三维重建模型的精度。因此,潘艳娟提出了单叶片分割方法来记录叶片边缘信息,并结合结构光技术建立网格法来校准叶片面积[12]。但是,在室外环境下,结构光法容易受到环境光的影响,且随着测量距离的增加,精度也会降低[13]。因此,该技术目前仅适用于室内场景。
1.1.2 三维激光扫描法
三维激光扫描法,又被称为“实景复制技术”,自20世纪90年代中期开始出现,是一种现代主动遥感技术[14],该技术利用精确的激光投射和高灵敏度的接收器,获取植物的三维形态和表面信息。激光扫描仪通过对植物进行扫描,可以获取植物的点云数据,然后采用三维重建技术对点云数据进行重建,最终生成植物三维模型。相比传统技术,它具有高效率、高精度、非接触式等优点[15],并适用于中空或复杂的植物结构的重建。
目前,三维激光扫描仪测量精度可以达到毫米级[16],且不受环境光影响,大大减小了外部环境对测量的约束。获取的数据是连续、密集、海量、自动化、数字化信息,在一些开源的软件中如CloudCompare可以直接导入并构建三维模型[17]。由于数据量非常庞大,因此对于园艺植物的表型测量、数据处理较为复杂。但是,三维激光扫描仪价格昂贵[18],无法广泛应用。
1.1.3 飞行时间法
飞行时间法(time of flight,简称TOF)的本质原理是“距离(s)=速度(v)×时间(t)”。类似于自然界中的蝙蝠和海豚,这种技术通过发射特殊频率的信号感知物体,并接收被物体反射回来的信号。飞行时间法是通过向物体发射连续的脉冲光,当光信号遇到物体反射后,由接收传感器收到反射光信号,并计算通过发射到接收的时间差来确定物体的距离和深度信息[19-20],如图2所示。基于TOF技术设计的相机中,Kinect相机最具代表性[21]。Kinect相机是基于TOF技术设计的一款相机,是微软公司为增强Xbox 3D游戏体验而推出的相机。它搭载了深度相机和RGB相机,能够捕获深度视频和实时的RGB信息[22]。Kinect相机具有性价比高、结构简单、体积小巧、帧率高、实时性强、分辨率高、性能稳定等优点[23-24],在植物三维重建中得到广泛应用,并可用于测量植物参数,包括高度和生物量估算[25-26]。
在植物三维重建方面,孙国祥等建立了基于Kinect传感器自校准的多视角RGB-D图像三维重建方法,并用于解决不同测量位置下多视点云初始配准问题,实现了带有标定贴纸的温室番茄植株的高精度三维重构[27]。Wang等利用Kinect v2传感器对生菜样品采集原始数据,生成稳定的三维点云,提出了配准效果评估系统,并开发了自动配准算法,避免在三维重建过程中手动调整参数导致视觉配准效果的时间消耗、人工消耗和明显误差等问题[28]。然而,深度相机很容易受周围环境影响,产生噪点。
1.2 被动式三维重建
被动式三维重建一般是依靠环境光源,通过相机获取研究对象的图像,再通过特定算法来构建立体的三维模型的技术[29]。根据相机数目不同可以分为单目视觉技术、双目视觉技术和多目视觉技术。
1.2.1 单目视觉技术
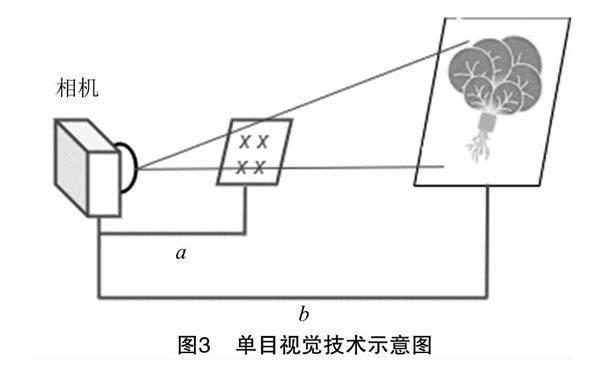
单目视觉技术是一种低成本、易于部署且广泛适用的三维重建方法,它使用单个摄像头作为图片采集设备,通过同一时间段内获取的连续图像来构建三维模型[5]。这些图像可以是单张或多张,在提取亮度、纹理、轮廓和特征点等信息的基础上,估算图像的深度信息。其中具有代表性的算法为运动恢复结构(SFM),这是一种基于多视图几何基本原理的3D重建技术[30],通过相机采集不同角度的感兴趣区域(从原始图像中提取的一个区域)图像,然后通过三角测量原理计算目标的深度信息[31],其原理如图3所示,SFM法使用的是普通RGB摄像头,与Kinect相机最大不同之处在于,其无需额外的硬件设备,因此成本更加低廉,操作简单,且受到环境约束较少[32-33]。
Xiao等采用SFM法,在田间3个生长阶段对20个基因型甜菜的三维模型进行了重建[33];Zermas等则利用SFM法重建了玉米点云,并通过骨架提取获得表型参数[34];Yang等提出了一种基于SFM法的处理管道来处理视频,无需从不同角度记录多张图像,只需要在植株周围录制视频即可重建高质量的点云模型,避免了数据收集过程中的复杂性[31]。
然而,单目SFM存在的不足之处是只能在固定的距离下进行测量,无法随意改变测量距离[35],这增加了重建模型的不确定性。
1.2.2 双目视觉技术
双目视觉技术是通过模拟人的视觉,基于视差原理来获取目标深度信息,通过左右相机角度不同产生视差,再利用深度计算获取目标的深度信息[18],从而实现三维图像的重建,如图4所示,其中X为基线,即相机之间的距离。双目视觉技术已经在各个领域得到广泛应用,成熟度高且对硬件要求较低,具有高精度特点,如殷悦等通过双目相机成功对拟南芥进行三维重建,得到精准的三维模型[36]。
针对双目视觉而言,由于其采用被动光源来测量物体,因此很容易受到外部光线的干扰。当外部光线太暗或太亮时,会影响双目视觉的特征提取和匹配,从而降低立体视觉效果。此外,实现立体成像需要消耗大量计算资源,因此在进行复杂计算时,可能会导致实时性变差[37]。同时,大部分有关农业视觉设计所用到的双目相机的测量范围都受基线影响[38],使得其部分图像区域提供的深度信息无法准确定位[39]。
1.2.3 多目视觉技术
多目视觉技术与双目视觉技术类似,都基于视差原理获取目标深度信息。但是,多目视觉技术使用3台或更多相机进行测量[40],在不同角度下获取多组图像来推断目标的深度信息(图5)。因此,多目视觉技术是双目视觉技术的一种延伸。
与双目视觉技术相比,多目视觉技术可以实现自动在线检测,无需人为设置相关辐射源,从而减少测量中的盲区,获得更广的视野范围和更高的识别精度[41]。此外,多目视觉技术还可以解决双目视觉中的误匹配问题[42],并且适用于各种场景。然而,由于多目视觉技术需要处理大量数据来进行三维重建,因此其处理时间较长,难以满足实时性要求。此外,在重建过程中需要进行大量的匹配运算,这会增加计算量并易受环境光照条件的影响,且当多个摄像机之间的距离较远(即基线距离较大)时,重建效果也可能会降低[43]。
1.3 基于端到端深度学习三维重建
随着深度学习技术的不断成熟,它在许多领域中得到广泛应用,其中端到端(end to end)深度学习技术已成为热门研究领域,这是一种基于神经网络模型的机器学习方法,可以直接从输入数据到输出结果进行端到端的学习和预测[44]。与传统机器学习方法不同,端到端深度学习技术可以自动地学习特征表示和映射关系,不需要手动选择或设计特征提取器、分类器等复杂的预处理流程,使得整个模型具有更高的自动化和泛化能力(图6)。
端到端深度学习常用的核心技术包括多层前馈神级网络[45],例如卷积神经网络(convolutional [JP3]neural networks,简称CNN)、自编码器(autoencoder,简称AE)、生成对抗网络(generative adversarial networks,简称GAN)等[46]。其中CNN是一种非常有效的图像处理方法,它通过多层卷积层和池化层提取输入数据中的特征,并通过全连接层进行分类或回归任务,对图像进行特征提取和学习[47];自编码器是一种无监督学习的神经网络模型,它可以将高维的数据表示为低维的编码,并还原出与原始数据相似的重构数据,对数据进行降维和表示[48],同时还能够学习到数据的基本特征[49];GAN则是一种生成式模型,由生成器(generator)和判别器(discriminator)2个对抗神经网络组成,生成器的作用是生成与真实数据相似的假数据,而判别器则是区分生成器产生的数据与真实数据之间的区别,通过二者不断生成对抗而产生高质量的样本[50-51]。
基于端对端深度学习技术的蔬菜三维重建通常包括以下流程:(1)数据收集和预处理:首先需要收集大量的蔬菜图像数据,并根据需要对这些图像进行预处理和裁剪,以便在后续步骤中使用。此外,还需要使用一些标注工具对数据进行标注,比如对图像中的蔬菜实例进行标记和预测。(2)模型选择:基于CNN的模型可以提取出图像中的特征信息,实现蔬菜结构的恢复[52];而基于GAN的模型可以生成更真实的蔬菜三维模型[53]。需要注意的是,由于蔬菜具有不同的形态和纹理特征,因此需要选择合适的CNN模型,并根据情况进行微调。(3)模型训练:模型训练的过程是将大量的标注数据输入到模型中,并通过误差反向传播(back-propagation)算法不断调整模型参数,使得模型能够逐渐适应任务需求。需要注意的是,在模型训练时,应该选择合适的损失函数(loss function)和优化器(optimizer)[54-55],以便达到最佳的训练效果。(4)模型测试与评估:在进行深度学习模型测试时,需要使用1组或多组测试数据集来评估训练好的深度学习模型的性能和准确性,通常情况下,可以使用精准率、召回率、F1分数、ROC曲线等指标来评估模型的性能[54,56]。
传统的蔬菜三维重建方法通常需要进行多次扫描和拼接,成本高昂且操作复杂。相比之下,端到端深度学习方法则能自动地通过深度神经网络对多个角度或不同切面的植物影像进行特征提取和学习,通过优化将这些特征融合在一起,生成高质量的三维模型,具有更强的灵活性、快速性和便捷性。如Li等提出一种基于全卷积网络的端到端分割方法PlantU-net,提高了幼苗群体顶视图图像的高通量分割性能,实现了表型数据的准确提取[57];Li等提出了一种新的基于深度RNN和卷积运算的端到端训练网络,通过原始透视稀疏三维点云精确预测生菜株高[58]。
然而,深度学习模型需要大量的标注数据进行训练,因此需要花费大量时间和人力成本来收集和标注数据[59],对设备的硬件也有一定的要求,且深度学习模型具有复杂的参数结构,需要进行大量的调参工作[60],会增加蔬菜三维重建的复杂性。
2 植物三维重建技术在蔬菜领域的应用
2.1 蔬菜表型分析
蔬菜表型测定是一种对蔬菜性状进行定量评估的方法,包括其生长、形态、生理和产量等方面[61],在这个过程中,三维重建技术被广泛应用。使用多种不同类型的传感器和相机进行数据采集和图像处理,可以获取到蔬菜的精确三维模型,并计算出蔬菜各个部位的长度、宽度、高度等参数[62-63]。这些参数可以用于评估蔬菜不同品种或不同种类之间的差异,以及在不同生长条件下蔬菜的生长变化情况。此外,在蔬菜的生长和加工过程中,可以利用三维重建技术来追踪蔬菜形态的变化,对蔬菜的生长动态轨迹进行分析。
同时,三维重建技术还可以用于蔬菜的种植管理,实时监测蔬菜生长、发育过程中的形态和结构,精确测量蔬菜的生长速度、叶片数量、枝条数量等指标,并进一步优化种植环境和生长条件,以提升蔬菜产量和质量。
2.2 蔬菜外观识别和分类
蔬菜外观识别和分类对蔬菜行业的生产和市场营销等方面至关重要。在蔬菜外观识别方面,三维重建技术也有很大的应用潜力。传统的蔬菜品质检测通常是人工观察外观、颜色、大小等参数来鉴定品质,这种方法非常耗时且主观性较强。而利用三维重建技术可以提取蔬菜表面的各种形态特征,如表面纹理、棱角、凹陷等,并与数据库中已知蔬菜品类的三维模型进行比较,从而实现蔬菜外观识别[64]。同时,在识别过程中也能针对蔬菜外观缺陷等问题进行智能判断和修复,以提高品质的稳定性和准确性。
其次,使用三维重建技术将蔬菜数字化,可以通过计算机程序对其进行精准的分类[65]。具体来说,计算机通过对不同类别蔬菜的三维模型分析和对比,可以学习到各种蔬菜的特征[66-67],从而快速准确地进行分类。同时,可以将多个角度的蔬菜图像进行三维重建,从而形成真实的三维蔬菜模型。这些在不同视角下的三维模型可以为后续的蔬菜分类任务提供更多的信息和特征。
三维重建技术的应用能够提高蔬菜品质的分类准确性和效率,为蔬菜的生产和市场营销等方面提供更好的发展机会。
2.3 病虫害防治
蔬菜在生长过程中,经常受到病虫害的侵袭,导致产量和品质下降等问题。传统的病虫害监测和防治方法主要依赖于人工巡视和捕捉,成本较高且存在误差和漏检等问题。基于深度卷积神经网络和无监督方法[68],对蔬菜表面的纹理、颜色、形状等进行分析[69],可以快速检测出蔬菜是否存在坏点、裂纹、疤痕、虫害和病害等问题[70-71]。这些信息可以帮助农户及时发现问题并采取有效的措施进行治疗,提高蔬菜质量。
2.4 蔬菜市场营销智能化管理
三维重建技术还可以在蔬菜市场营销中起到重要的作用。对于蔬菜生产企业和销售商来说,高效的品质识别和分类工具是提高市场竞争力的关键要素之一。通过三维重建技术中的数据存储和检索技术,可以将蔬菜的三维模型信息进行管理、查询和比较,以方便销售商找到符合市场需求的蔬菜品种和品质。另外,在市场营销中还可以利用三维重建技术实现虚拟展示和陈列[72],让消费者更好地了解和选择自己喜欢的蔬菜品种。
3 三维重建技术在蔬菜领域应用的优势和挑战
3.1 优势
3.1.1 数据准确性高
三维重建技术具有高精度的数据采集能力,可获取蔬菜的尺寸、形状等物理属性数据,并采用非接触式无损检测的方法,避免了传统人工测量方法存在的误差问题及农产品损伤问题,从而提高数据准确性。
3.1.2 生产管理效率提高
采用三维重建技术可快速获取蔬菜的外部结构信息,比传统手工测量或模具建立方法更为高效,缩短了数据采集时间和生产周期,以此提高蔬菜生产管理效率。
3.1.3 数字化管理
三维重建技术将蔬菜的形态、数量和位置等信息数字化,便于管理和分析。例如,在收获和运输过程中,可以使用三维重建技术记录蔬菜的位置和状态,生成蔬菜的三维模型,并通过GPS等位置信息记录蔬菜所在位置。这样可以确保蔬菜在运输过程中得到合理的处理,同时也便于追溯蔬菜的来源和运输过程;也可以利用三维模型中的数据分析蔬菜的销售情况,包括销售量、销售额、销售地点等信息,为超市管理者提供更好的数据决策支持。
3.2 挑战
3.2.1 数据处理复杂
三维重建技术需要对大量图像数据进行处理和拼接,同时还需要对数据进行校准,这对计算机硬件和软件要求较高。而且对于不同类型的蔬菜,其颜色、形状等特征差异较大[73],因此需要建立相应的模型和算法,才能确保数据处理的准确性和完整性。
3.2.2 成本较高
三维重建技术所需的设备和人力成本较高,尤其是在规模化生产环境下,需投入更多的人力和资金,这可能限制了该技术的推广和应用。
3.2.3 精度有限
由于蔬菜具有一定的柔韧性和变形性[74],在三维重建过程中容易出现误差,同时,相邻叶片、枝条和果实造成的重叠、遮挡等问题会对精度产生较大影响[75]。
3.2.4 应用场景受限
目前三维重建技术主要应用于室内环境下,对于在室外生长的蔬菜,由于光照、遮挡等因素的干扰,会使数据采集更加困难,这也限制了该技术在实际应用中的推广。
4 未来展望
在技术不断发展的趋势下,三维重建技术在蔬菜领域拥有广泛的应用前景。展望未来,我们可以从以下几个方面进行探索和研究。
(1)结合人工智能技术:将三维重建技术与深度学习等人工智能技术结合,实现更为准确的作物分类识别、表型分析和病虫害检测等任务[76]。
(2)进一步提高精度:针对三维重建技术的精度问题,采用先进的算法和设备,提升其精度和稳定性。
(3)开放式生态系统:构建基于三维重建技术、农业生产信息化、决策支持系统等多个部分相互联系的开放式生态系统,以提高农业生产效率和产品品质。
5 总结
本文介绍了三维重建技术在蔬菜领域上的应用原理,包括主动三维重建、被动三维重建和基于端对端深度学习的三维重建等技术,并探讨了其在蔬菜的表型分析、识别与分类、病虫害防治和市场营销智能化管理等方面的应用。同时,通过对现有问题进行分析,提出了三维重建技术未来进一步研究的方向。随着未来技术的不断成熟,三维重建技术将为蔬菜领域提供更充足的技术支持,促进蔬菜种植和生产的智能化发展。
参考文献:
[1]国家统计局. 方晓丹:居民收入继续稳步增长居民消费支出持续恢复[DB/OL]. (2022-01-18)[2023-05-26]. http://www.stats.gov.cn/sj/sjjd/202302/t20230202_1896589.html.
[2]林 帆,王利强. 采后绿色蔬菜保鲜护绿技术研究进展[J]. 中国食品学报,2023,23(3):416-427.
[3]熊思博,王 琦,刘光洁. 三维重建技术的发展与现状研究综述[J]. 电脑知识与技术,2022,18(36):114-117.
[4]周静静,郭新宇,吴 升,等. 基于多视角图像的植物三维重建研究进展[J]. 中国农业科技导报,2019,21(2):9-18.
[5]刘志海,代振锐,田绍鲁,等. 非接触式三维重建技术综述[J]. 科学技术与工程,2022,22(23):9897-9908.
[6]Wang J Z,Zhang Y,Gu R R. Research status and prospects on plant canopy structure measurement using visual sensors based on three-dimensional reconstruction[J]. Agriculture,2020,10(10):462.
[7]Zuo C,Zhang X L,Hu Y,et al. Has 3D finally come of age?—an introduction to 3D structured-light sensor[J]. Infrared and Laser Engineering,2020,49(3):303001.
[8]吕深圳. 基于数字光栅投影技术的三维面型测量研究[D]. 长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所),2021:4-6.
[9]Hennad A,Cockett P,McLauchlan L,et al. Characterization of irregularly-shaped objects using 3D structured light scanning[C]//2019 International Conference on Computational Science and Computational Intelligence (CSCI). IEEE,2019:600-605.
[10]Qi Z S,Wang Z. Highlight removal based on the regional-projection fringe projection method[J]. Optical Engineering,2018,57(4):1.
[11]Lin H,Gao J,Mei Q,et al. Adaptive digital fringe projection technique for high dynamic range three-dimensional shape measurement[J]. Optics Express,2016,24(7):7703-7718.
[12]潘艳娟.基于条纹投影的植物三维重建和叶片分割技术研究[D]. 合肥:安徽农业大学,2021:41-51.
[13]Hu Y,Chen Q,Feng S J,et al. Microscopic fringe projection profilometry:a review[J]. Optics and Lasers in Engineering,2020,135:106192.
[14]Cheng L,Chen S,Liu X Q,et al. Registration of laser scanning point clouds:a review[J]. Sensors,2018,18(5):1641.
[15]Paulus S. Measuring crops in 3D:using geometry for plant phenotyping[J]. Plant Methods,2019,15:103.
[16]Jo Y H,Hong S. Three-dimensional digital documentation of cultural heritage site based on the convergence of terrestrial laser scanning and unmanned aerial vehicle photogrammetry[J]. ISPRS International Journal of Geo-Information,2019,8(2):53.
[17]Vacca G. Overview of open source software for close range photogrammetry[J]. The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2019,XLII-4/W14:239-245.
[18]Teng X W,Zhou G S,Wu Y X,et al. Three-dimensional reconstruction method of rapeseed plants in the whole growth period using RGB-D camera[J]. Sensors,2021,21(14):4628.
[19]李占利,周 康,牟 琦,等. TOF相机实时高精度深度误差补偿方法[J]. 红外与激光工程,2019,48(12):263-272.
[20]郑太雄,黄 帅,李永福,等. 基于视觉的三维重建关键技术研究综述[J]. 自动化学报,2020,46(4):631-652.
[21]Hu Y,Wang L,Xiang L R,et al. Automatic non-destructive growth measurement of leafy vegetables based on kinect[J]. Sensors,2018,18(3):806.
[22]Wang L,Huynh D Q,Koniusz P.A comparative review of recent kinect-based action recognition algorithms[J]. IEEE Transactions on Image Processing,2019,29:15-28.
[23]贾佳璐,应忍冬,潘光华,等. 基于ToF相机的三维重建技术[J]. 计算机应用与软件,2020,37(4):127-131.
[24]Andújar D,Dorado J,Fernández-Quintanilla C,et al. An approach to the use of depth cameras for weed volume estimation[J]. Sensors,2016,16(7):972.
[25]Vázquez-Arellano M,Paraforos D S,Reiser D,et al. Determination of stem position and height of reconstructed maize plants using a time-of-flight camera[J]. Computers and Electronics in Agriculture,2018,154:276-288.
[26]Xie W J,Wei S,Yang D Y.Morphological measurement for carrot based on three-dimensional reconstruction with a ToF sensor[J]. Postharvest Biology and Technology,2023,197:112216.
[27]孙国祥,汪小旵,刘景娜,等. 基于相位相关的温室番茄植株多模态三维重建方法[J]. 农业工程学报,2019,35(18):134-142.
[28]Wang L H,Zheng L H,Wang M J,et al. Kinect-based 3D reconstruction of leaf lettuce[C]//2020 ASABE Annual International Virtual Meeting,July 13-15,2020.St.Joseph,MI:American Society of Agricultural and Biological Engineers,2020:1.
[29]Moons T,van Gool L,Vergauwen M.3D reconstruction from multiple images part 1:principles[J]. Foundations and Trends in Computer Graphics and Vision,2008,4(4):287-404.
[30]Iglhaut J,Cabo C,Puliti S,et al. Structure from motion photogrammetry in forestry:a review[J]. Current Forestry Reports,2019,5(3):155-168.
[31]Yang Z S,Han Y X. A low-cost 3D phenotype measurement method of leafy vegetables using video recordings from smartphones[J]. Sensors,2020,20(21):6068.
[32]Liu R,Yao L W,Yan L,et al. Research on real scene 3D modelling based on multi-view[J]. Journal of Physics:Conference Series,2021,1852(2):022080.
[33]Xiao S F,Chai H H,Shao K,et al. Image-based dynamic quantification of aboveground structure of sugar beet in field[J]. Remote Sensing,2020,12(2):269.
[34]Zermas D,Morellas V,Mulla D,et al. 3D model processing for high throughput phenotype extraction–the case of corn[J]. Computers and Electronics in Agriculture,2020,172:105047.
[35]Lu Y W,Wang Y X,Chen Z J,et al. 3D plant root system reconstruction based on fusion of deep structure-from-motion and IMU[J]. Multimedia Tools and Applications,2021,80(11):17315-17331.
[36]殷 悦,张慧春,郑加强. 基于双目立体视觉的植物三维重建系统[J]. 中国农机化学报,2021,42(3):129-135.
[37]魏加立,曲慧东,王永宪,等. 基于飞行时间法的3D相机研究综述[J]. 红外技术,2021,43(1):60-67.
[38]Li Y J,Feng Q C,Li T,et al. Advance of target visual information acquisition technology for fresh fruit robotic harvesting:a review[J]. Agronomy,2022,12(6):1336.
[39]鞠执一,邓干然,李旭荣,等. 双目视觉技术在农业监测中的应用现状及展望[J]. 现代农业装备,2021,42(6):2-7,14.
[40]韩雨坤,潘 翀,王文涛,等. 基于多目立体视觉和神经网络标定的表面形貌测量方法研究[J]. 实验流体力学,2021,35(6):44-51.
[41]Chen M Y,Tang Y C,Zou X J,et al. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology[J]. Computers and Electronics in Agriculture,2020,174:105508.
[42]Feng H P,Zhang L W. Location of feature points in 3D reconstruction of multi vision color image based on principal component analysis[C]//Proceedings of the 13th EAI International Conference on Mobile Multimedia Communications,Mobimedia 2020,27-28 August 2020,Cyberspace. EAI,2020:2295947.
[43]Li M X,Li T M,Jiang Y. Marker displacement method used in vision-based tactile sensors—from 2-D to 3-D:a review[J]. IEEE Sensors Journal,2023,23(8):8042-8059.
[44]杜永萍,赵以梁,阎婧雅,等. 基于深度学习的机器阅读理解研究综述[J]. 智能系统学报,2022,17(6):1074-1083.
[45]郝蕊洁,万小红. 基于深度卷积神经网络的激光三维图像重建方法[J]. 激光杂志,2023,44(3):153-157.
[46]刘彩霞,魏明强,郭延文. 基于深度学习的三维点云修复技术综述[J]. 计算机辅助设计与图形学学报,2021,33(12):1936-1952.
[47]尹显明,棘 玉,张日清,等. 深度学习在基于叶片的油茶品种识别中的研究[J]. 南京林业大学学报(自然科学版),2023,47(3):29-36.
[48]叶 青,冯振乾,朱彦陈,等. 小样本民族药植物图像识别综述[J]. 现代信息科技,2023,7(4):81-86.
[49]张云飞,贺丽君,王子溪,等. 面向机器视觉任务的多尺度图像特征压缩算法[DB/OL]. (2023-05-16)[2023-05-26]. https://kns.cnki.net/kcms/detail/61.1069.t.20230515.1807.002.html.
[50]Creswell A,White T,Dumoulin V,et al. Generative adversarial networks:an overview[J]. IEEE Signal Processing Magazine,2018,35(1):53-65.
[51]Gui J,Sun Z N,Wen Y G,et al. A review on generative adversarial networks:algorithms,theory,and applications[J]. IEEE Transactions on Knowledge and Data Engineering,2023,35(4):3313-3332.
[52]吴 蓓,肖 黎. 基于卷积神经网络的农作物智能图像识别分类研究[J]. 农机化研究,2023,45(12):20-23,29.
[53]Madsen S L,Dyrmann M,Jrgensen R N,et al. Generating artificial images of plant seedlings using generative adversarial networks[J]. Biosystems Engineering,2019,187:147-159.
[54]Syed-Ab-Rahman S F,Hesamian M H,Prasad M. Citrus disease detection and classification using end-to-end anchor-based deep learning model[J]. Applied Intelligence,2022,52(1):927-938.
[55]Rehman T U,Ma D D,Wang L J,et al. Predictive spectral analysis using an end-to-end deep model from hyperspectral images for high-throughput plant phenotyping[J]. Computers and Electronics in Agriculture,2020,177:105713.
[56]Buxbaum N,Lieth J H,Earles M. Non-destructive plant biomass monitoring with high spatio-temporal resolution via proximal RGB-D imagery and end-to-end deep learning[J]. Frontiers in Plant Science,2022,13:758818.
[57]Li Y L,Wen W L,Guo X Y,et al. High-throughput phenotyping analysis of maize at the seedling stage using end-to-end segmentation network[J]. PLoS One,2021,16(1):e0241528.
[58]Li J S,Wang Y,Zheng L H,et al. Towards end-to-end deep RNN based networks to precisely regress of the lettuce plant height by single perspective sparse 3D point cloud[J]. Expert Systems with Applications,2023,229:120497.
[59]Kamilaris A,Prenafeta-Boldú F X. Deep learning in agriculture:a survey[J]. Computers and Electronics in Agriculture,2018,147:70-90.
[60]Yu S W,Ma J W,Wang W L. Deep learning for denoising[J]. Geophysics,2019,84(6):V333-V350.
[61]俞盛旗,胡 栋,刘 威. 基于视觉的光学三维重建技术及其在农作物信息感知中的应用[J]. 激光与光电子学进展,2023,60(22):2200002.
[62]Zhu R S,Sun K,Yan Z Z,et al. Analysing the phenotype development of soybean plants using low-cost 3D reconstruction[J]. Scientific Reports,2020,10:7055.
[63]Xing Y N,Pham D,Williams H,et al. Look how they have grown:non-destructive leaf detection and size estimation of tomato plants for 3D growth monitoring[EB/OL]. 2023:arXiv:2304.03610.http://arxiv.org/abs/2304.03610.pdf.
[64]Hameed K,Chai D,Rassau A. Score-based mask edge improvement of Mask-RCNN for segmentation of fruit and vegetables[J]. Expert Systems with Applications,2022,190:116205.
[65]Jadhav T,Singh K,Abhyankar A. Volumetric estimation using 3D reconstruction method for grading of fruits[J]. Multimedia Tools and Applications,2019,78(2):1613-1634.
[66][JP3]Hameed K,Chai D,Rassau A. A sample weight and AdaBoost CNN-
based coarse to fine classification of fruit and vegetables at a supermarket self-checkout[J]. Applied Sciences,2020,10(23):8667. [HJ2mm]
[67]Hameed K,Chai D,Rassau A. A progressive weighted average weight optimisation ensemble technique for fruit and vegetable classification[C]//2020 16th International Conference on Control,Automation,Robotics and Vision (ICARCV).Shenzhen,China.IEEE,2020:303-308.
[68][JP3]Li J,Jia J J,Xu D L. Unsupervised representation learning of image-
based plant disease with deep convolutional generative adversarial networks[C]//2018 37th Chinese Control Conference (CCC).Wuhan,China.IEEE,2018:9159-9163.
[69]Ahmad N,Asif H M S,Saleem G,et al. Leaf image-based plant disease identification using color and texture features[J]. Wireless Personal Communications,2021,121(2):1139-1168.
[70]Chen Z Y,Wu R H,Lin Y Y,et al. Plant disease recognition model based on improved YOLO v5[J]. Agronomy,2022,12(2):365.
[71]Gadade H D,Kirange D K. Machine learning based identification of tomato leaf diseases at various stages of development[C]//2021 5th International Conference on Computing Methodologies and Communication (ICCMC). Erode,India.IEEE,2021:814-819.
[72]Sobociński P,Strugaa D,Walczak K,et al. Large-scale 3D web environment for visualization and marketing of household appliances[C]//de Paolis L T,Arpaia P,Bourdot P.International Conference on Augmented Reality,Virtual Reality and Computer Graphics. Cham:Springer,2021:25-43.
[73]史卫东,梁 劲,张 力,等. 菜心和芥蓝表型多样性的主成分分析与聚类分析[J]. 西南农业学报,2020,33(12):2726-2735.
[74]张 楠,赵姣姣,崔维霞,等. 5份大白菜叶卷曲突变体卷曲特性研究[J]. 江苏农业科学,2022,50(18):228-238.
[75]严佳豪,彭辰晨,陈超凡,等. 基于机器视觉的植物表型研究现状[J]. 南方农机,2021,52(8):195-196.
[76]曾 安,彭杰威,刘 畅,等. 基于多尺度几何感知Transformer的植物点云补全网络[J]. 农业工程学报,2022,38(4):198-205.
收稿日期:2023-05-26
基金项目:广东省重点领域研发计划(编号:2023B0202100001)。
作者简介:张铭桂(1999—),男,广东阳江人,硕士研究生,研究方向为蔬菜领域机器视觉、图像处理、设施农业肥水调控。E-mail:jetkiss@qq.com。
通信作者:刘厚诚,博士,教授,博士生导师,主要从事蔬菜栽培生理生态、设施园艺、植物工厂技术的教学科研工作。E-mail:liuhch@scau.edu.cn。
猜你喜欢
小学生优秀作文(低年级)(2021年5期)2021-07-21 02:20:44
小太阳画报(2020年3期)2020-04-24 09:28:13
作文评点报·低幼版(2017年38期)2017-11-15 15:40:29
电脑知识与技术(2016年25期)2016-11-16 13:12:40
科教导刊(2016年25期)2016-11-15 17:53:37
中国科技博览(2016年22期)2016-11-01 18:11:37
软件工程(2016年8期)2016-10-25 15:55:22
中国科技博览(2016年18期)2016-10-19 11:20:01
科学与财富(2016年28期)2016-10-14 23:55:52
科技视界(2016年20期)2016-09-29 11:11:40