
考虑驾驶人交通环境感知的车辆安全势场及跟驰行为建模
2024-06-26 20:55昝雨尧王翔王可馨沈佳燕
山东科学 2024年3期
关键词:遗传算法
昝雨尧 王翔 王可馨 沈佳燕

DOI:10.3976/j.issn.1002-4026.20230064
收稿日期:2023-04-15
基金项目:国家自然科学基金青年科学基金项目(52002262)
作者简介:昝雨尧(1998—),女,硕士研究生,研究方向为交通运输规划与管理。E-mail:yyzan2016@stu.suda.edu.cn
*通信作者,王翔,男,副教授,研究方向为智能网联仿真。Tel: 15906205193,E-mail:wangxiang@suda.edu.cn
摘要:安全势场能够描述车辆驾驶过程中周围安全风险的空间分布。针对既有模型重点关注车辆自身运动状态而忽视驾驶人环境感知信息的问题,围绕车辆安全势场模型改进以及其在跟驰模型中的应用展开研究。引入相对状态影响因子和道路交通状态影响因子对既有模型进行改进,强化车辆间相对速度和所处道路交通状态对行车安全性的影响;利用车型系数对实际空间的距离进行修正,研究多车型混合环境下车型差异对行车安全性的影响;利用感知安全势场将前车运动状态与后车跟驰行为建立联系,得到基于感知安全势场的车辆跟驰模型;采用遗传算法对本文所建模型和智能驾驶人跟驰模型、安全势场跟驰模型进行标定。结果表明,上述3个模型在测试集上的均方根误差分别为6.124、8.515、7.248,证明该模型误差最小,能够更为精确地描述车辆跟驰行为。研究成果能为行车安全风险评估和车辆驾驶行为决策提供理论依据。
关键词:交通运输工程;车辆跟驰模型;驾驶人环境感知;车辆安全势场;遗传算法
中图分类号:U491.25 文献标志码:A 文章编号:1002-4026(2024)03-0111-10
开放科学(资源服务)标志码(OSID):
Vehicle safety potential field and car-following model
based on traffic environment perception
ZAN Yuyao1,2,WANG Xiang1*,WANG Kexin1,SHEN Jiayan1
(1.School of Rail Transportation, Soochow University, Suzhou 215131, China;
2.Jiangsu Sutong Bridge Co., Ltd., Nantong 226017, China)
Abstract∶The safety potential field is utilized to characterize the distribution of safety risks around a vehicle during the driving process. However, when analyzing the safety potential field formed by moving vehicles, the existing models only focus on the vehicle motion but ignore the traffic environment information perceived by drivers. This study focuses on the construction of an improved safety potential field model and its application to the car-following model. Herein, the relative state influence factor is introduced to strengthen the influence of relative speed among vehicles, and the traffic state influence factor is introduced to reflect its influence on driving safety. Moreover, the vehicle type coefficient is introduced to adjust the distance to reflect its influence on driving safety in mixed vehicle type traffic. The car-following model is developed by using the preceptive safety potential field to establish the relationship between the motion state of the front vehicle and the behavior of the following vehicle. Furthermore, the genetic algorithm is employed to calibrate the proposed model, the intelligent driver model, and the car-following model based on the safety potential field. The results show that the root mean square errors of these three models mentioned before are 6.124, 8.515 and 7.248 respectively, which proves that the model proposed in this paper can describe car-following behavior more accurately. Therefore, this study can provide theoretical support for driving risk evaluation and vehicle control under a complex environment.
Key words∶traffic and transportation engineering; car-following model; traffic environment perception; vehicle safety potential field; genetic algorithm
车辆跟驰模型描述了在限制超车的单一车道内行驶的相邻两车之间的相互作用。对跟驰行为进行建模可以量化跟驰车辆间的纵向相互作用,从而理解交通流运行特性,揭示交通拥堵等交通现象的内在机理[1]。从交通工程角度跟驰模型可以分为:刺激-反应类、安全距离类、心理-生理类和人工智能类模型;从统计物理角度可以分为:优化速度类、智能驾驶模型和元胞自动机模型[2]。然而,上述模型难以量化多种因素对跟驰行为的综合影响程度,无法反映复杂环境下的车辆驾驶行为。
势场理论为解决这一问题提供了新的思路,能够描述车辆驾驶过程中周围安全风险的空间分布,为车辆跟驰行为预测提供丰富的信息来源。在21世纪初期,开始有学者提出人工势能场的概念,并将其应用在机器人路径规划和避撞方面。近年来,受该思想的启发,不少学者将势场理论推广至交通流研究领域,将车辆行驶环境视作势能场,分析各种交通要素对行车安全性的影响。Wolf等[3]针对道路线、道路边界、运动车辆和速度分别建立了相应的势场模型。陶鹏飞等[4]借鉴人工势能场的基本思想,将效率与安全两种因素抽象为驾驶员受到的驱动力和阻碍力,进而分别建立相应的跟驰模型。Ni等[5-7]提出车辆运动就是沿着场的最低点穿越势能场以寻找危险最小的路线,并利用NGSIM(next generation simulation)数据对所建立的跟驰模型进行了标定。Li等[8]从刺激-反应的角度出发,利用势场概念提出了一种简单的跟驰模型。王建强等[9-10]根据前人的研究,建立了人-车-路闭环系统的“行车风险场”统一模型,能够表征运动物体、道路环境要素和驾驶人个体特性等不同交通要素对行车安全性造成的风险。Li等[11]在前人的研究基础上对势场模型进行了改进,将车辆的行车安全场优化为椭圆结构。李林恒等[12]首次将加速度引入车辆势场中,并利用人工蜂群算法对建立的安全势场跟驰模型进行标定。Jia等[13]针对现有车辆势场函数存在引力和斥力表达式分割独立的缺陷,借鉴分子间相互作用关系建立统一的基于伦纳德-琼斯
势的车辆相互作用势场函数。
综上所述,势能理论已经在交通领域得到了广泛的应用,能够描述不同交通要素对车辆运动决策的影响,并真实准确地刻画车辆驾驶行为。但是已有模型在分析车辆势场时,重点关注车辆自身运动状态,暂未考虑驾驶人对周围环境信息的感知,以致模型的实际应用受到较大局限。因此,本文引入相对状态影响因子和交通状态影响因子对既有模型进行改进,以强化车辆间相对速度和所处道路交通状态对行车安全性的影响,并使用改进后的安全势场描述车辆驾驶过程中周围安全风险的空间分布,以实现车辆跟驰行为预测。
1 考虑驾驶人交通环境感知的车辆安全势场模型
1.1 安全势场概念
在交通系统中,车辆的加减速行为可看作是车辆在受到各交通要素的作用下寻求跟驰平衡点的过程。各交通要素对行驶车辆产生的风险与场具有相似的基本特征[9]:
(1)客观性。自然界中的势场已经被证明客观存在,这正如交通要素对行驶车辆产生的风险同样客观存在,并不会因为人们的主观意志而消失。
(2)普遍性。场的存在具有普遍性,这正如交通要素对行车安全造成的影响普遍存在于整个交通环境中。
(3)可变性。场强会随着时间和空间的变化而变化,这正如交通要素对行驶车辆产生的风险会随着行车环境发生变化。
(4)可测性。势场的大小与其场源的特性属性及其空间位置有关,因此势场是可以定量描述的,这正如行车风险在一定程度是可测、可控的。
因此,可以利用安全势场表征交通要素对于行车安全的影响,将影响车辆行驶的交通要素看作场源。道路交通由人、车、路等基本要素组成,如图1所示。在本文研究的单车道车辆跟驰场景中,后车所受到的安全势场主要是来自前车的车辆势场,车道线场和道路边界场的影响可以忽略不计,因此本文重点分析运动车辆形成的势场。
1.2 车辆感知安全势场场强
1.2.1 模型假设
车辆势场来源于道路上的运动车辆,其他车辆应避免与之过分靠近以免发生碰撞。对于这类运动车辆,有如下假设:
(1)运动车辆对周围其他车辆构成的行车危险程度与该运动车辆的等效质量有关。等效质量越大,则其他车辆与之发生的碰撞而造成的后果越严重。
(2)运动车辆对周围其他车辆构成的行车危险程度与两者的等效距离有关。等效距离越短,则其他车辆与之碰撞风险越大。
(3)运动车辆对周围其他车辆构成的行车危险程度与该运动车辆的车辆类型有关。其他车辆与大型车发生碰撞的后果要比其与小型车的更严重。
(4)运动车辆对周围其他车辆构成的行车危险程度与两者的相对状态有关。当两者同向行驶时,若该运动车辆在前方,则其他车辆与它的速度差越大,碰撞风险越大;若该运动车辆在后方,则情况相反。由于高速公路的两个行驶方向间用路障隔开,因此反向行驶的两辆车间不存在碰撞风险。
(5)运动车辆对周围其他车辆构成的行车危险程度与道路交通状态有关。车辆在行驶过程中总是倾向于保持期望间距,若该运动车辆的实际车头间距小于期望间距,则说明交通状态较为拥堵,此时车辆势场的覆盖范围会适当缩小。
为了便于利用车辆轨迹数据进行参数标定工作,暂不考虑道路条件、驾驶人生理心理等的影响。基于上述影响因素与行车危险程度的关系,参考文献[3,9]中车辆势场的形式,得到运动车辆的场强强度,如式(1)所示,即
EV_ij=MiSijRirijrijrij,(1)
式中:EV_ij为车辆j所受到的由运动车辆i形成的势场;Mi为运动车辆i的等效质量;Sij为运动车辆i与周围其他物体j的相对状态影响因子;Ri为运动车辆i所感知到的道路交通状态影响因子;rij=(xj-xi,yj-yi)为运动车辆i指向车辆j的距离矢量,(xi,yi)为运动车辆i的空间坐标,(xj,yj)为车辆j的空间坐标。
1.2.2 等效质量
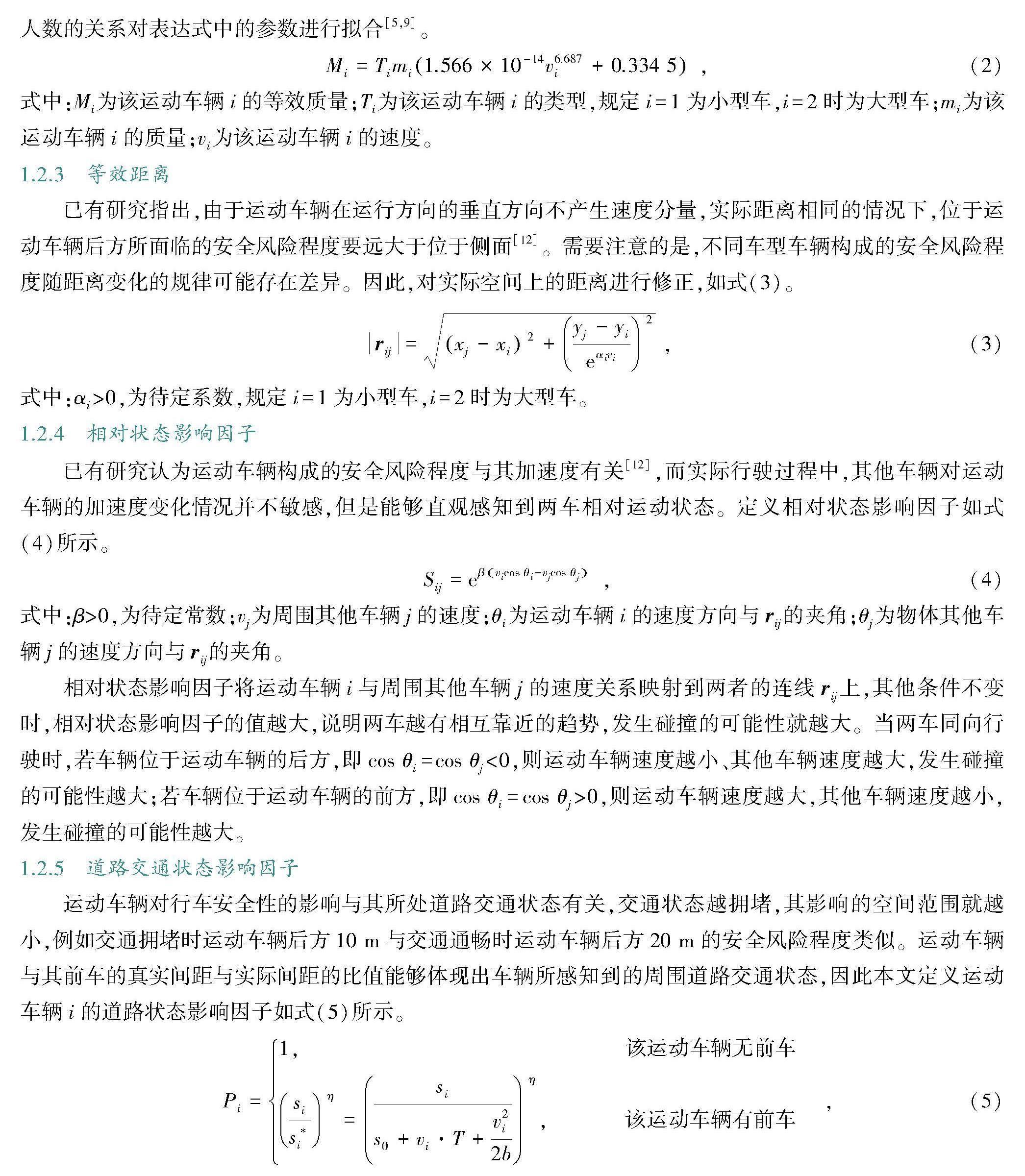
已有研究指出,运动车辆的等效质量与其质量、类型及运动状态有关,并通过高速公路车速和事故死亡人数的关系对表达式中的参数进行拟合[5,9]。
Mi=Timi1.566×10-14v6.687i+0.334 5,(2)
式中:Mi为该运动车辆i的等效质量;Ti为该运动车辆i的类型,规定i=1为小型车,i=2时为大型车;mi为该运动车辆i的质量;vi为该运动车辆i的速度。
1.2.3 等效距离
已有研究指出,由于运动车辆在运行方向的垂直方向不产生速度分量,实际距离相同的情况下,位于运动车辆后方所面临的安全风险程度要远大于位于侧面[12]。需要注意的是,不同车型车辆构成的安全风险程度随距离变化的规律可能存在差异。因此,对实际空间上的距离进行修正,如式(3)。
rij=xj-xi2+yj-yieαivi2,(3)
式中:αi>0,为待定系数,规定i=1为小型车,i=2时为大型车。
1.2.4 相对状态影响因子
已有研究认为运动车辆构成的安全风险程度与其加速度有关[12],而实际行驶过程中,其他车辆对运动车辆的加速度变化情况并不敏感,但是能够直观感知到两车相对运动状态。定义相对状态影响因子如式(4)所示。
Sij=eβvicos θi-vjcos θj,(4)
式中:β>0,为待定常数;vj为周围其他车辆j的速度;θi为运动车辆i的速度方向与rij的夹角;θj为物体其他车辆j的速度方向与rij的夹角。
相对状态影响因子将运动车辆i与周围其他车辆j的速度关系映射到两者的连线rij上,其他条件不变时,相对状态影响因子的值越大,说明两车越有相互靠近的趋势,发生碰撞的可能性就越大。当两车同向行驶时,若车辆位于运动车辆的后方,即cos θi=cos θj<0,则运动车辆速度越小、其他车辆速度越大,发生碰撞的可能性越大;若车辆位于运动车辆的前方,即cos θi=cos θj>0,则运动车辆速度越大,其他车辆速度越小,发生碰撞的可能性越大。
1.2.5 道路交通状态影响因子
运动车辆对行车安全性的影响与其所处道路交通状态有关,交通状态越拥堵,其影响的空间范围就越小,例如交通拥堵时运动车辆后方10 m与交通通畅时运动车辆后方20 m的安全风险程度类似。运动车辆与其前车的真实间距与实际间距的比值能够体现出车辆所感知到的周围道路交通状态,因此本文定义运动车辆i的道路状态影响因子如式(5)所示。
Pi= 1, 该运动车辆无前车
sis*iη= sis0+vi·T+v2i2bη, 该运动车辆有前车 ,
(5)
式中:si为该运动车辆与其前车的真实间距;s*i为该运动车辆的期望间距;η为待定常数,η>0;s0为安全间距;T为反应时间;b为制动加速度。
随着真实间距减小、期望间距增大,道路交通状态影响因子的值减小,此时车辆所感知到的周围交通状态趋于拥堵,运动车辆影响的空间范围缩小。
1.3 车辆感知安全势场分布
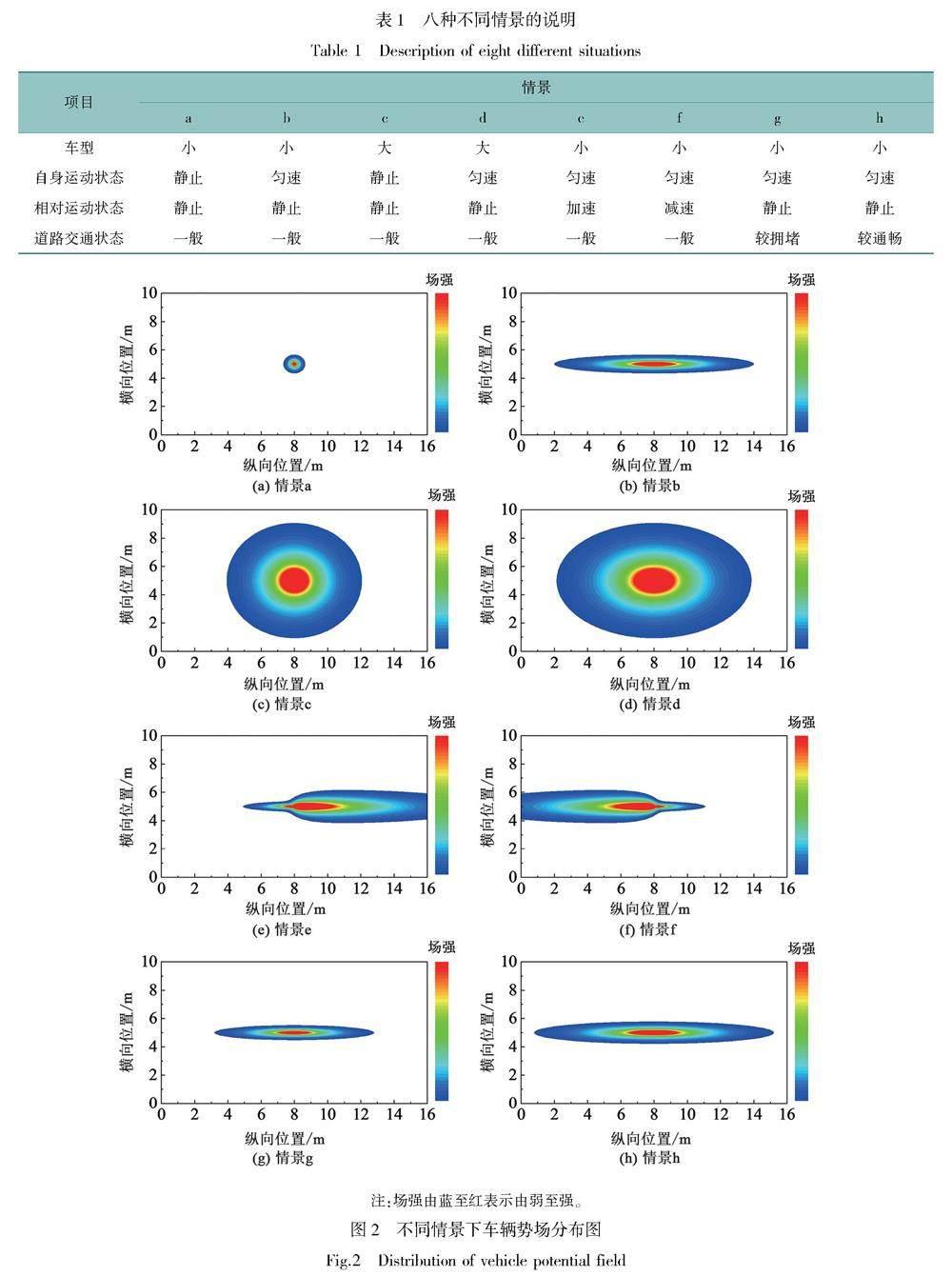
根据式(1)~(5),调整场源车辆的车型、自身运动状态、相对运动状态(即场源车辆相对于周围其他车辆的速度状态)、道路交通状态,绘制8种不同情景下(见表1)车辆势场的场强分布等高线图,如图2所示,颜色越红表示势场强度越大。
图2(a)中,场源车辆处于静止状态,此时该车辆形成的势场是一种圆形。这意味着在相同的距离内,不论其他车辆位于场源车辆的任何方向,其面临的安全风险程度都是相同的。图2(b)中,场源车辆以10 m/s的速度沿纵向匀速运动,此时车辆势场所展现的形式是一种沿运动方向压缩的椭圆形。由于车辆在横向的速度分量为0,所以无论车辆在纵向的速度如何变化,横向的车辆势场强度始终与图2(a)一致。而纵向的车辆势场强度随着场源车辆速度的提升而对称增强。图2(c)中,场源车辆处于静止状态且其为大型车,此时车辆势场虽然是一种圆形,但与图2(a)相比,圆形的半径变大,这是因为随着场源车辆体型增大,受其势场影响的空间区域被扩展。图2(d)中所示的情景与图2(b)的情景相似,只有场源车辆的车型发生了改变。此时车辆势场虽然同样是一种沿运动方向压缩的椭圆形,但与图2(b)相比,椭圆在横向所覆盖的面积明显更大。这意味着如果其他车辆想要换道至场源车辆所在车道,那么相较于小型车,场源车辆是大型车时对换道安全性的影响更大。同时,图2(d)与图2(b)在纵向的 势场强度相差不大,这意味着当速度增大到一定程度时,车型差异对行车安全性的影响可以忽略不计。图2(e)中,场源车辆以10 m/s的速度沿纵向匀速运动,且周围其他车辆沿相同方向以8 m/s的速度均速运动,即场源车辆相对于其他车辆加速。与图2(b)相比,此时势场出现明显的前倾状态。这意味着场源车辆对于前方车辆的影响程度大于后方,那么后车就可以在保证安全的前提下加速。图2(f)中所示的情景与图2(e)的情景相反,场源车辆相对于其他车辆减速,此时势场出现明显的后倾状态,即场源车辆对其后方车辆的影响程度更大,那么后车就需要提前进行减速。
图2(g)中,场源车辆以10 m/s的速度沿纵向匀速运动,且道路交通状态较拥堵。此时车辆势场所展示的形式虽然也是一种椭圆性,但与图2(b)相比,椭圆的覆盖面积收缩,这是因为受到交通状态的影响,场源车辆影响的空间区域缩小。
图2(h)中所示的情景与图2(g)的情景相反,道路交通状态较通畅,此时势场覆盖面积变大,意味着场源车辆周围的风险程度提高。
2 感知安全势场跟驰模型
以较为简单的单车道跟驰为研究场景,假设前后两车均沿道路中线行驶,如图3所示。此时两车的横向间距为0,纵向间距为yA-yB,根据上文建立的模型,可以得到该情景下车辆A的车辆势场,如式(6)。
EV_AB=MASABRArABrABrAB
MA=mATA1.566×10-14v6.687A+0.334 5
SAB=eβvAcos θA-vBcos θB=eβvB-vA
rAB=xA-xB2+yA-yBeαAvA2=yA-yBeαAvA
PA=sAs*Aη= sAs0+vA·T+v2A2bη 。(6)
参考文献[12],根据电场力的计算公式F=Eq,推导车辆在跟驰状态中受到的场力。将电场强度E等价于车辆势场强度;带电量q为电场环境下点电荷的固有属性,将安全势场环境下车辆的固有属性定义为车辆的等效质量。则前车A对后车B形成的场力FAB如式(7)所示。
FAB=EV_ABMB,(7)
其中,MB为后车B的等效质量。
已有研究指出安全势场形成的场力属于短程力[12],当前后两车距离较短的情况下,场力是改变后车运动状态的主要原因;而当前后车辆相距较远时,后车的加减速情况主要受期望速度和当前速度的影响。因此,可以得出基于感知安全势场的车辆跟驰模型,如式(8)。
v·B=amaxtanh δvf-vB-FABMB,(8)
式中: amax为车辆最大加速度;δ为待定系数;vf为期望速度。
3 模型参数标定
3.1 数据处理
本文所采用的数据是来自美国NGSIM数据集中I-80号高速公路的车辆轨迹数据。该数据集记录了车辆编号、时间戳、位置、速度、前车编号、后车编号等信息,因而可以直接获得跟驰过程中的前车信息和后车信息。跟驰数据提取流程如图4所示,相关规则为:
(1)车头间距s<150 m,即剔除自由流情景,确保后车处于跟驰状态。
(2)速度方差var>4,即确保跟驰轨迹数据含有较多减速停车以及启动加速状态,而不是一直保持匀速行驶状态。
(3)跟驰时间t>40 s(该数据集中车辆平均行驶时间为80.4 s),即提取多种变速状态下的车辆运行数据。
通过筛选整理得到了424组跟驰车对轨迹数据,其中,前车为小型车的有374组,前车为大型车的有50组。数据集包括三个时间段,将第一个时段和第二个时段的数据作为训练集,第三个时段作为测试集。
3.2 算法选择
采用遗传算法(genetic algorithm, GA)对所建立的感知安全势场跟驰模型进行标定。遗传算法主要特点是以编码形式工作,可以并行搜索多个峰值而不是一个点,有利于在多值空间寻找全局最优解[14]。选取均方根误差(root mean square error,σRMSE)作为遗传算法的目标函数来衡量车辆纵向位置的真实值和预测值之间的误差。σRMSE的具体表达式如式(9)所示。
σRMSE=∑Nn=1y^n-yn2N,(9)
其中,N为模型参数标定的样本量,yn和y^n分别为第n个样本的实际纵向位置和预测纵向位置。
3.3 标定结果
在遗传算法中,设置种群规模为400,最大遗传次数为500,每次标定重复3次,取误差最小的一次作为参数标定的结果,最终得到感知安全势场模型的参数标定结果。与此同时,为更好地评价本文所建模型的效果,选择与经典的智能驾驶人IDM(intelligent driver model)跟驰模型、安全势场跟驰模型进行对比,结果如表2。
3.4 模型效果分析
上述3个模型在多车型混合环境下的测试集σRMSE如表3所示。通过表3的结果可以发现,本文构建的感知安全势场跟驰模型的误差小于IDM跟驰模型和安全势场跟驰模型。这是因为以往的跟驰模型主要考虑前车运动状态对跟驰效果的影响,而在实际跟驰行为中,即便前车运动状态保持不变,后车驾驶人也可能因为前车车型、两车相对状态、周围交通状态等方面的差异而做出不同驾驶决策,所以本文构建的感知安全势场跟驰模型在精度方面优于IDM跟驰模型和安全势场跟驰模型。
以测试集中的个体车辆为对象,根据其纵向位移的σRMSE,绘制3个模型的个体车辆纵向位移σRMSE分布图,如图5。可以发现,IDM模型和安全势场跟驰模型的个体车辆σRMSE主要分布在4~8 m,而本文的感知安全势场跟驰模型主要分布在2~6 m,这证明对于大多数车辆而言,本文所建跟驰模型能够更为精准地预测车辆跟驰行为。
分别考虑前车为小型车和大型车的场景,比较不同跟驰模型对车辆轨迹的拟合程度,如图6。对比发现,当前车为小型车时,虽然3个模型对轨迹和车头间距的预测趋势和误差都在合理范围之内,但本文所提出的感知安全势场跟驰模型的优势更明显,说明道路交通状态在到一定程度上能够对跟驰行为造成影响。当前车为大型车时,IDM跟驰模型和安全势场跟驰模型均出现了与前车距离过近的现象,感知安全势场更符合实际情况,这是因为其考虑了车型差异,能够更好地预测这类场景的车辆跟驰行为。
4 结论
本文充分考虑驾驶人环境感知对运动车辆构成的行车安全性的影响,对既有安全势场模型进行改进,并利用改进后的安全势场来描述后车对前车风险的响应,以实现车辆跟驰行为建模。主要成果如下:
(1)考虑到既有安全势场模型在分析运动车辆对行车安全性的影响程度时重点关注车辆自身运动状态,本文引入相对状态影响因子和道路交通状态影响因子对既有安全势场模型进行改进,改进后的感知安全势场模型能够反映驾驶人环境感知对其形成的行车风险的影响。
(2)利用感知安全势场将前车运动状态与后车跟驰行为建立联系,得到基于感知安全势场的车辆跟驰模型,从而对后车运动进行更加精准的决策控制。
(3)基于NGSIM微观轨迹数据集,本文采用遗传算法对所提出的感知安全势场模型和IDM跟驰模型、安全势场跟驰模型进行标定。结果表明,感知安全势场跟驰模型的σRMSE为6.124,小于其余两个跟驰模型,能够更为精确地描述车辆跟驰行为。
然而,本文在以下方面还存在一些不足之处,需在今后继续完善:
(1)真实交通环境的复杂程度要远高于论文中所描述的简单场景,在后续工作中将采用更复杂的场景进行拓展研究,进一步扩大安全势场的场源范围,使模型能应用于高速公路匝道、城市道路十字路口等多种场景。
(2)车辆个性化差异同样会对其跟驰行为产生影响。例如,在同样的道路环境下,相较于保守型驾驶人,激进型驾驶人更倾向于选择较短的跟车间距。因此,如何在现有模型中体现车辆个性化差异是未来研究的重点内容。
参考文献:
[1]杨龙海, 张春, 仇晓赟, 等. 车辆跟驰模型研究进展[J]. 交通运输工程学报, 2019, 19(5): 125-138. DOI: 10.19818/j.cnki.1671-1637.2019.05.013.
[2]王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1) :115-127. DOI: 10.3969/j.issn.1001-7372.2012.01.018.
[3]WOLF M T, BURDICK J W. Artificial potential functions for highway driving with collision avoidance[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA: IEEE, 2008: 3731-3736. DOI: 10.1109/ROBOT.2008.4543783.
[4]陶鹏飞, 金盛, 王殿海. 基于人工势能场的跟驰模型[J]. 东南大学学报(自然科学版), 2011, 41(4): 854-858. DOI: 10.3969/j.issn.1001-0505.2011.04.037.
[5]NI D H. A unified perspective on traffic flow theory. Part I: the field theory[J]. Applied Mathematical Sciences, 2013, 7: 1929-1946. DOI: 10.12988/ams.2013.13175.
[6]NI D H. A unified perspective on traffic flow theory. Part II: the unified diagram[J]. Applied Mathematical Sciences, 2013, 7: 1947-1963. DOI: 10.12988/ams.2013.13176.
[7]NI D H, WANG H Z. A unified perspective on traffic flow theory. Part III: validation and benchmarking[J]. Applied Mathematical Sciences, 2013, 7: 1965-1982. DOI: 10.12988/ams.2013.13177.
[8]LI C G, JIANG X B, WANG W H, et al. A simplified car-following model based on the artificial potential field[J]. Procedia Engineering, 2016, 137: 13-20. DOI: 10.1016/j.proeng.2016.01.229.
[9]王建强,吴剑,李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报,2016,29(1):105-114. DOI: 10.3969/j.issn.1001-7372.2016.01.014.
[10]WANG J Q, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. DOI: 10.1109/TITS.2015.2401837.
[11]LI M J, SONG X L, CAO H T, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. DOI: 10.1016/j.ymssp.2019.01.040.
[12]李林恒,甘婧,曲栩,等.智能网联环境下基于安全势场理论的车辆跟驰模型[J].中国公路学报,2019,32(12):76-87. DOI: 10.19721/j.cnki.1001-7372.2019.12.008.
[13]JIA Y F, QU D Y, SONG H, et al. Car-following characteristics and model of connected autonomous vehicles based on safe potential field[J]. Physica A: Statistical Mechanics and Its Applications, 2022, 586: 126502. DOI: 10.1016/j.physa.2021.126502.
[14]戴晓晖, 李敏强, 寇纪淞. 遗传算法理论研究综述[J]. 控制与决策, 2000, 15(3): 263-268. DOI: 10.13195/j.cd.2000.03.7.daixh.002.
猜你喜欢
测控技术(2018年2期)2018-12-09
石油地球物理勘探(2017年2期)2017-11-23
池州学院学报(2017年3期)2017-10-16
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
水利规划与设计(2016年9期)2017-01-15
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
现代计算机(2016年34期)2016-02-28
舰船科学技术(2016年1期)2016-02-27
智能系统学报(2015年4期)2015-12-27
