
基于CAN总线的虚拟仪表界面车道线绘制方法
2024-06-08 11:01魏锋左蓓蕾齐振芳梁洪莫维华
汽车电器 2024年5期
关键词:CAN总线
魏锋 左蓓蕾 齐振芳 梁洪 莫维华

【摘 要】顺应当前虚拟仪表与CAN总线融合发展的新趋势,设计一种基于CAN总线的虚拟仪表界面车道线绘制方法。基于此方法,虚拟仪表可以精确实时地显示出车辆行车时的车道线,有利于驾驶员掌握车辆的行驶道路状况,提高行驶安全性,同时提升驾驶体验感。
【关键词】CAN总线;虚拟仪表;车道线
中图分类号:U463.7 文献标识码:A 文章编号:1003-8639( 2024 )05-0059-02
A Method for Drawing Lane Lines in Virtual Instrument Interface Based on CAN Bus
WEI Feng,ZUO Beilei,QI Zhenfang,LIANG Hong,MO Weihua
(Automotive Engineering Research Institute,Guangzhou Automobile Group Co.,Ltd.,Guangzhou 511434,China)
【Abstract】In response to the new trend of the integration of virtual instruments and CAN bus,this article designs a virtual instrument interface lane drawing method based on CAN bus. This method can accurately and real-time display the lane lines of the vehicle during driving,which is beneficial for drivers to grasp the road conditions of the vehicle,improve driving safety,and enhance the driving experience.
【Key words】CAN bus;virtual instrument;lane markings
作者简介
魏锋(1991—),男,硕士,工程师,主要从事汽车信息娱乐域产品设计与开发工作。
随着汽车智能化、信息化的发展以及无人驾驶的日趋实用化,汽车用户对HMI(Human Machine Interface,人机接口)的交互能力提出了更高的要求,虚拟仪表技术也在汽车上应用得愈加广泛,正逐渐替代传统的指针式机械仪表[1]。仪表作为车辆运行状态的显示终端,是驾驶员与汽车进行信息交流的重要接口和界面,对汽车行驶的安全性和经济性起着重要作用,驾驶员对仪表所显示内容的丰富性、准确性、实时性的需求也在日益增高[2]。因此,目前仪表上可显示的内容越发丰富且智能化,诸如通过智驾雷达感知获取到的车辆、行人、车道线等目标物的信息,并通过CAN总线传输到仪表进行计算分析后将其显示在仪表界面上,使驾驶员即时了解并掌握车辆的运行状态,妥善处理各种行驶情况[3]。然而,虽然车辆可通过坐标在仪表上实现显示,但车辆行驶的车道线的形态存在多种不确定性,车道线检测往往会受到眩光、遮挡、磨损、道路颜色的细微变化、周围建筑物的阴影和其它车辆的遮挡及障碍物等的影响[4],从而降低仪表界面车道线显示的精确度和准确性。故本文设计一种基于CAN总线的仪表界面车道线绘制方法,该方法可以实时、准确地显示出车辆当前的行驶道路状况,且通过二维屏幕显示出三维道路效果,使驾驶员能够精准地观察到道路的动态变化,从而提高行驶安全性以及座舱的科技性。
1 虚拟仪表显示技术方案
虚拟仪表又称全液晶仪表,通过接收车辆其它ECU节点的CAN信号,将CAN信号转化为数字信号处理后以图形和文字的形式显示在LCD屏幕上,可以快速、准确、清晰地显示指示灯、车速、转速、里程、报警类等信息[5]。典型的虚拟仪表硬件系统采用主SOC和辅MCU相结合的方案,辅MCU用于接收车辆数据信息,处理后传输给主SOC,从而驱动液晶屏LCD显示相关信息,如图1所示。
2 虚拟仪表界面车道线绘制方法
2.1 界面坐标系与参数说明
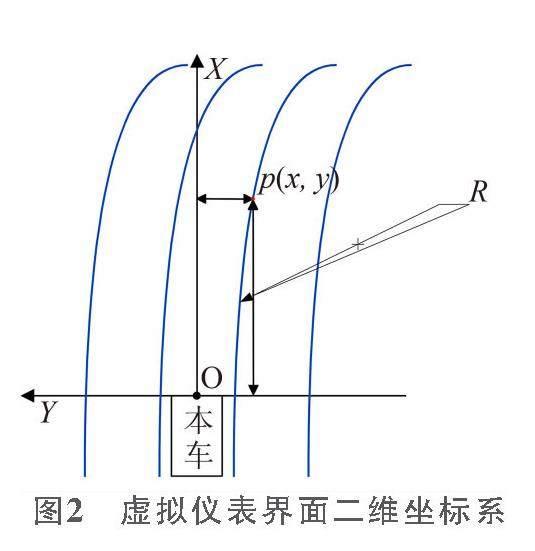
基于仪表界面建立二维坐标系,如图2所示,以本车前保险杠前端面中心作为坐标系原点O,界面Y轴从右至左、界面X轴从下至上皆为由负到正,蓝色4条线为车道线。本文将以4条车道线3个车道为例说明该方法。
基于此坐标系,在车道线上取一点p(x,y),x为该点横坐标,y为该点纵坐标,可得车道线方程如下:
y = A0 + A1 x + (1)
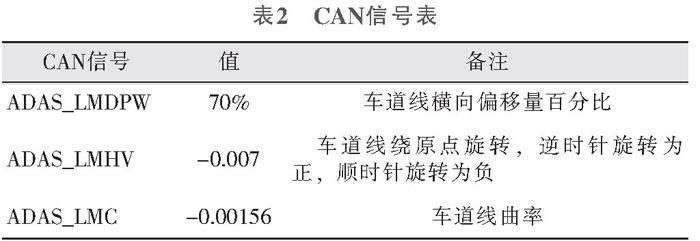
式中:A0——车道线横向偏移量,根据道路宽度标准,设定车道默认宽度为3.5m,则A0=ADAS_LMDPW×3.5;A1——车道线与X轴夹角的三角函数tan值,即A1=ADAS_ LMHV;A2——车道线曲率,即A2=ADAS_LMC。ADAS_ LMDPW、ADAS_LMHV、ADAS_LMC为CAN信号,参数和CAN信号详细定义见表1。
2.2 车道线动态显示方法
根据公式(1)可计算出车道线上每一个点的坐标,将这些点连成线,则可在仪表界面绘制出一条完整的車道线,车道宽度为固定值,通过车道线的平移,则可绘制出道路上所有的车道线。由于车辆在实际行驶中存在变道等驾驶行为,针对变道行为,本方法通过本车在仪表界面中保持坐标系中心点不动,车道线动态平移的方式来实现。当ADAS_LMDPW在0%~100%变化时,车道线从右至左线性移动,4根车道线一起移动,当ADAS_LMDPW=0%,y=0时,本车道左侧车道线与原点O重叠,如图3所示。当ADAS_LMDPW=100%,y=0时,本车道右侧车道线与原点O重叠,如图4所示。
2.3 车道线动态显示方法的实现与分析
通过2.2章节提出的方法可实现车道线的动态显示,在此基础上再通过仪表图形设计软件和车道线向车后移动的动态效果即可在仪表界面上实现车辆在车道中行驶的效果。此外,还需建立摄像机坐标系,将构建好的3D物体显示在2D屏幕上。与处于2D空间中的屏幕坐标系不同,摄像机坐标系是一种能为驾驶者提供观测本车及周围事物信息并处于3D空间中的坐标系,此坐标系应定义在摄像机的屏幕可视范围。在该坐标系中,原点为本车前保险杠前端面中心,X轴向前(朝向屏幕内或摄像机方向),Y轴向左,Z轴向上,本文将摄像机的坐标定为(-23, 0,6),如图5、图6所示。
通过仿真软件模拟整车CAN信号向仪表发送CAN信号,可以模拟实现汽车在道路上运行的场景。首先,随机发送表2中的3个CAN信号值;其次,当X轴坐标值设为100时,则可通过公式(1)计算出本车车道左侧车道线上该点y坐标值,即y=3.5×0.7-0.007×100-0.5×0.00156×1002=-6.05,最后,通过给x赋值范围为0~200的整数,则可得到车道线所有点的坐标,即可绘制出一条完整的车道线,再通过复制平移的方式,则可得到所有的车道线,如图7所示。CAN信号值为周期性信号,通过信号的周期性发送并绘制出车道线,即可实现车辆变道动态行驶等场景。基于此,仪表能够实时读取车道参数并将其显示在液晶仪表界面中,显示内容准确、无卡顿跳变现象,从而实现逼真的车辆行驶道路场景并以此提高驾驶者在虚拟场景中的沉浸感。
3 结论
随着全液晶虚拟仪表的智能化发展,为满足仪表显示元素的丰富性、精确性、实时性要求,本文基于CAN总线提出了一种虚拟仪表界面车道线绘制方法。该方法根据软硬件的迭代不断完善,已在相关车型仪表上进行了实际应用,并取得了较为理想的应用效果。
综上所述,基于CAN总线的虚拟仪表界面车道线绘制方法不仅顺应了智能驾驶领域车辆前进轨迹的规划,并为驾驶员提供了车辆行驶的道路实况,从而极大地提高了车辆行驶的安全性,同时也为智能驾驶和无人驾驶领域的开拓性和适应性提供了可靠的方法支撑。
参考文献:
[1] 杨辉华,杨二闯,张卫东,等. 基于多核Cortex-A9的汽车三维全液晶仪表研究[J]. 電视技术,2018,42(1):57-62.
[2] 袁秀珍. 纯电动汽车虚拟仪表的设计与实现分析[J]. 电子世界,2020(20):16-17.
[3] 汤春球,曾豪杰,邓飞宇. 基于ARM和QNX的电动汽车虚拟仪表系统设计[J]. 数字制造科学,2021,19(3):223-226.
[4] 武志斐,李守彪. 基于实例分割的车道线检测算法[J]. 汽车工程,2023,45(2):263-272.
[5] 汤东兴. 基于i.MX6和S32K的汽车虚拟仪表系统研究与实现[D]. 重庆:重庆大学,2020.
(编辑 杨凯麟)
收稿日期:2023-11-20
猜你喜欢
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年20期)2016-08-19
电脑知识与技术(2016年10期)2016-06-16
电脑知识与技术(2016年7期)2016-05-19
电脑知识与技术(2016年5期)2016-04-14
