基于NSGA-II算法的分布式驱动电动汽车制动转矩分配控制策略研究
2024-06-03 14:46:04王伟曲辅凡杨钫李文博王鹏龙朱曰莹
汽车技术 2024年5期
王伟 曲辅凡 杨钫 李文博 王鹏龙 朱曰莹


【摘要】针对分布式驱动电动汽车制动安全性和制动能量回收兼顾的问题,研究了基于NSGA-II多目标优化算法的车辆制动转矩分配控制策略。建立基于模糊控制的优化集筛选模块,根据车速以及需求制动转矩从Pareto前沿优化集中确定最优转矩分配系数。以某款乘用车为研究对象,基于MATLAB/Simulink和VPAT搭建制动转矩分配控制策略模型进行仿真,并搭建硬件在环仿真平台,对算法的实时性和有效性进行了验证。结果表明:WLTC工况下,基于NSGA-II的制动转矩分配的控制策略制动转矩分配系数更加接近理想I曲线对应的分配系数,电机制动高效区工作点提高了9.51百分点,再生制动能量回收率提升4.71百分点。
主题词:分布式驱动 NSGA-II算法 模糊控制 制动转矩分配
中图分类号:U467.1 文献标志码:A DOI: 10.19620/j.cnki.1000-3703.20230518
Research on Braking Torque Distribution Control Strategy of Distributed Drive Electric Vehicle Based on NSGA-II Algorithm
Wang Wei1, Qu Fufan1, Yang Fang2,3, Li Wenbo1, Wang Penglong4, Zhu Yueying4
(1. CATARC Automotive Test Center (Tianjin ) Co., Ltd., Tianjin 300300; 2. Global R&D Center, China FAW Corporation Limited, Changchun 130013; 3. National Key Laboratory of Advanced Vehicle Integration and Control, Changchun 130013; 4. College of Mechanical Engineering, Tianjin University of Science and Technology, Tianjin 300222)
【Abstract】To balance braking safety and braking energy recovery of distributed drive electric vehicles, this article explored the vehicle braking torque distribution control strategy based on NSGA-II multi-objective optimization algorithm. An optimization module based on fuzzy control was established, and the optimal torque distribution coefficient was determined from the Pareto frontier optimization according to vehicle speed and demand braking torque. With an electric passenger vehicle as the research object, a brake torque distribution control strategy model was built based on Matlab/Simulink and VPAT and simulated. A hardware-in-loop simulation platform was built, and real-time performance and validity of this algorithm were verified. As was shown in the result, the brake torque distribution coefficient of the control strategy based on NSGA-II was closer to the distribution coefficient of ideal I curve, and the operation points of the motor braking efficiency zones were increased by 9.51 percentage point, and the energy recovery rate of vehicle regenerative braking was increased by 4.71 percentage point.
Key words: Distributed drive, NSGA-II algorithm, Fuzzy control, Braking torque distribution
【引用格式】 王偉, 曲辅凡, 杨钫, 等. 基于NSGA-II算法的分布式驱动电动汽车制动转矩分配控制策略研究[J]. 汽车技术, 2024(5): 22-30.
WANG W, QU F F, YANG F, et al. Research on Braking Torque Distribution Control Strategy of Distributed Drive Electric Vehicle Based on NSGA-II Algorithm[J]. Automobile Technology, 2024(5): 22-30.
1 前言
分布式驱动电动汽车正逐渐成为新能源汽车发展的重要方向,其不仅在模块化底盘设计方面优势突出,还能有效缩短汽车动力链以及实现车身结构的紧凑设计[1]。四轮独立驱动电动汽车实施转矩分配控制策略,在满足整车行驶安全性的前提下,实现各个车轮转矩的优化分配,从而降低能耗、提高整车的经济性[2]。
Stefano等人建立传动系统的MAP图,研究换挡控制策略,减小换挡过程中的能量消耗,通过仿真验证了控制策略的有效性[3];Zhang等人对分布式驱动车辆进行了研究,利用进化算法对前后轴制动转矩分配系数进行优化,通过与固定的前后轴制动转矩分配控制策略对比,能量回收率提高了5.23%[4];张民安团队结合传统的遗传算法对车辆制动能量回收策略进行了研究,利用遗传算法求解最佳前后制动转矩分配系数,有效提高了制动能量回收率[5-6];许洋研究了依据理想制动分配曲线(I曲线)确定前后轴转矩分配限制,从而实现单轴制动最大化的转矩分配控制策略[7];王彦提出基于ECE R13法規,针对轻微制动、正常制动和紧急制动三种工况的前后转矩分配控制策略[8]。
目前,对制动转矩分配系数的研究集中在制动能量回收效率以及制动安全性的优化,且主要集中于能量回收最大化的研究[9]。针对制动效率和制动安全性的多目标优化问题,一般采用加权求和的方法将多目标优化转换为单目标优化,未考虑不同阶段各优化目标的相互影响,且不能反映单个优化目标对整体的影响,不能将多目标优化的优势充分展现[10]。因此,本文基于改进非支配排序基因算法(Non-dominated Sorting Genetic Algorithm-II,NSGA-II)对车辆制动安全性和制动能量回收效率进行多目标优化计算,算法采用快速非支配排序和拥挤度计算的方法,能够在较短的时间内找到一组最优解,并保持种群的多样性,通过求解得到Pareto前沿优化集,供决策者根据实际情况进一步抉择最优解,有效克服传统多目标优化算法的缺陷[11],在保证车辆行驶安全的前提下,设计合理的前后轴电机制动转矩来提高制动能量回收效率,搭建硬件在环仿真平台,利用真实控制器对算法的实时性和有效性进行了验证。
2 基于NSGA-II算法的制动转矩控制流程
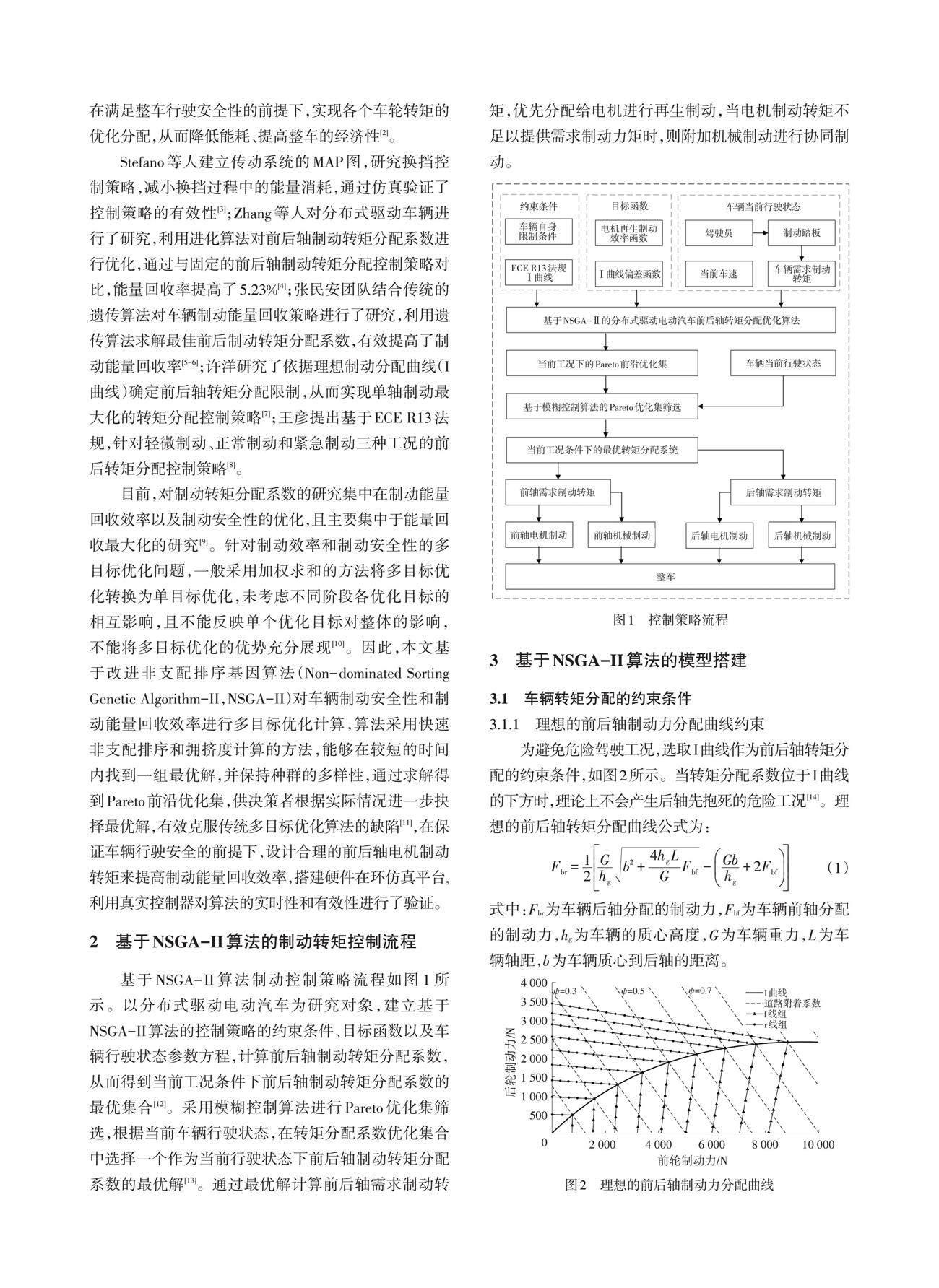
基于NSGA-II算法制动控制策略流程如图1所示。以分布式驱动电动汽车为研究对象,建立基于NSGA-II算法的控制策略的约束条件、目标函数以及车辆行驶状态参数方程,计算前后轴制动转矩分配系数,从而得到当前工况条件下前后轴制动转矩分配系数的最优集合[12]。采用模糊控制算法进行Pareto优化集筛选,根据当前车辆行驶状态,在转矩分配系数优化集合中选择一个作为当前行驶状态下前后轴制动转矩分配系数的最优解[13]。通过最优解计算前后轴需求制动转矩,优先分配给电机进行再生制动,当电机制动转矩不足以提供需求制动力矩时,则附加机械制动进行协同制动。
3 基于NSGA-II算法的模型搭建
3.1 车辆转矩分配的约束条件
3.1.1 理想的前后轴制动力分配曲线约束
为避免危险驾驶工况,选取I曲线作为前后轴转矩分配的约束条件,如图2所示。当转矩分配系数位于I曲线的下方时,理论上不会产生后轴先抱死的危险工况[14]。理想的前后轴转矩分配曲线公式为:
[Fbr=12Ghgb2+4hgLGFbf-Gbhg+2Fbf] (1)
式中:Fbr为车辆后轴分配的制动力,Fbf为车辆前轴分配的制动力,hg为车辆的质心高度,G为车辆重力,L为车辆轴距,b为车辆质心到后轴的距离。
图中,[φ]为路面附着系数,f线组表示前轮抱死情况下前后轮制动变化关系,r线组表示后轮抱死情况下前后轮制动力变化关系。
3.1.2 ECE R13法规约束
欧洲经济委员会乘用车制动性能法规(Electronic Control of Braking Systems,ECE R13)要求车辆行驶在道路附着系数为0.2~0.8的路面上[15]制动强度满足:
[z≥0.1+0.85(φ-0.2)] (2)
式中:z为车辆制动强度。
通常称前轴需求制动力与车辆总需求制动力的比值为制动力分配系数:
[β=FbfFbrk] (3)
式中:β为制动力分配系数,Fbf为前轴需求制动力,Fbrk为车辆总需求制动力。
由式(2)、式(3)可得制动力分配关系:
[β≤(b+zhg)(z+0.07)0.85zL] (4)
根据以上公式可得满足ECE R13法规的前后轴制动力分配的边界曲线如图3所示,公式为:
[0.07GbL+(Fbr+Fbf)Lhg(Fbr+Fbf)G+b+0.07hgL-0.85Fbf=0] (5)
3.1.3 车辆自身限制的约束
车辆最大再生制动强度主要受电机最大转矩的影响[16],驱动电机再生制动的约束条件为:
[Tmot_brk≤Tmot_max, nmot≤n0Tmot_brk≤Pmot_max×9 550nmot×ηreg, nmot>n0] (6)
式中:Tmot_brk为电机制动转矩,Tmot_max为电机最大制动转矩,Pmot_max为电机最大制动功率,nmot为电机转速,ηreg为电机发电效率,n0为电机额定转速。
电池特性是影响电机再生制动的一个重要因素[17],需要满足以下条件:
[Snow 式中:Snow为车辆当前SOC值,Smax为禁止再生制动SOC限值,Pbf_mot为前轴电机再生制动总功率,Pbr_mot为后轴电机再生制动总功率,Pbat_max为电池最大充电功率,Pacce为车辆当前电器消耗功率。 3.2 基于NSGA-II算法的转矩分配目标函数 以车辆安全性和制动能量回收率为优化目标,基于NSGA-II算法设定2个目标函数。 车辆在进行制动时,在满足约束条件的前提下,前后轴制动力分配系数越靠近理想I曲线对应的前后轴制动力矩分配系数,车辆制动将会越安全,第1个目标函数为: [min(f1)=β(I,Tall)-β(nmot,Tall)] (8) 式中:β(I,Tall)为当前需求制动转矩下I曲线的转矩分配系数,β(nmot,Tall)为当前需求制动转矩下实际转矩分配系数,Tall为当前总需求制动转矩。 以驱动电机再生制动的总功率为优化目标,电机再生制动的发电功率为: [Pall=Pbf_mot+Pbr_mot=2Tf1_motnmotη(Tf1_mot,nmot)9 550+Tr1_motnmotη(Tr1_mot,nmot)9 550] (9) 式中:Pall为整车四电机总发电功率,Tf1_mot为前轴单电机的制动转矩,Tr1_mot为后轴单电机的制动转矩,η(Tf1_mot,nmot)为前轴电机发电效率,η(Tr1_mot,nmot)为后轴电机发电效率。 为方便编程计算和绘制可视化图形,将第2个目标函数写为: [min(f2)=1/Pall] (10) 3.3 基于NSGA-II算法的转矩分配求解 NSGA-II算法是由Deb等学者基于非支配排序的思想设计的,具有良好的运算速度和鲁棒性[18]。依据3.2节中的约束条件和目标函数,以不同的电机转速和不同的电机需求制动转矩分别进行求解,从而得到一组优化集。设置初始种群数量为50个,最大迭代次数为20次,交叉的概率为0.8,突变的概率为0.1。其算法流程如圖4所示[19]。 该算法中,拥挤度计算为了让Pareto前沿优化集中的个体分布更加均匀,选择通过对目标函数的计算来对解的质量进行评价,个体的适应度越高,则代表解的质量越好,在接下来的子代循环中其生存概率越高。快速非支配排序是根据适应度计算值对种群进行等级划分,从而得到Pareto前沿优化集。选择操作是从父代中挑选优质基因,为生成新生子代做准备,本文选取锦标赛选择法。交叉和变异都是为了产生个体多样性的效果,通过组合不同个体的基因生成可能优良的个体,交叉变异是算法中产生新个体的主要方法[20]。对于交叉和变异操作选取的是二进制编码的方法,其处理过程如下: 对于j维的优化问题,假设目标矢量为: [y=y1,y2,…,yj] (11) 其中,第m维分量取值范围为[am,bm],am、bm分别为取值范围下限和上限,设长度为H的二进制数组为: [x=x1,x2,…,xH] (12) 将x作为y的编码时,在进行解码的过程中x分解为j个长度为Q=H/j的新元胞数组: [t=xQ1,xQ2,…,xQj] (13) 则t即为分量ym的二进制编码,与其对应的解码公式为: [ym=am+bm-am2Q-1i=0Q-1xm(Q-i)×2i] (14) 二进制编码的精度为: [ym=bm-am2Q-1] (15) 二进制编码的精度可以通过改变j的大小进行调整。为验证算法的有效性,设定车速为50 km/h,制动强度为0.2的输入工况,计算得到Pareto前沿如图5所示。第2个目标函数(f2)越趋近于0则代表发电功率越高,第1个目标函数(f1)越趋近于0代表安全系数越高。 图5中可以看出,算法产生的Pareto前沿分布均匀,得到一组具有非支配性的最优解集,验证了算法的有效性。 3.4 基于NSGA-II算法的优化集筛选模块 由于基于NSGA-II算法求解得到的是一组优化集,需要在优化集中选择当前工况下的最优解。优化集中选择最优解具有较强非线性以及输入目标较多的特点,运用模糊控制算法可以实现对优化集的筛选[21]。模糊控制器的控制流程如图6所示。 模糊控制器的输入分别为车速和需求制动力,输出为安全系数k。选择高斯函数作为模糊化的隶属度函数,三角函数作为清晰化的隶属度函数[18]。基于安全系数k在优化集中采用比例选择法选出符合当前车辆状态的最优转矩分配系数。其中优化集的数据按照目标函数(f1)的数值从小到大进行排序,并以自然数[0,m]进行编号,由式(16)从Pareto前沿中选取编号为u的数据作为当前最优转矩分配系数: [u=floor(m*k)] (16) 式中:u为最优转矩分配系数编号,m为优化集数据编号的最大值,floor表示向下取整数。 两个输入量的论域均设置为[0,100],均设置8个模糊子集,其中用g1~g8代表车速的不同等级,用B1~B8代表需求制动力的不同等级;输出论域设置为[0,1],分为9个模糊子集,用k1~k9表示。由此建立64条控制规则,控制规则如表1所示,控制规则三维显示图如图7所示。运用上述模糊控制器筛选NSGA-II算法的优化集,以不同的车速和制动强度对模型进行计算,得到一组适用于不同工况的车辆前后轴转矩分配系数,如图8所示。从图中可以看出,当车速较低时,车辆转矩分配系数较大,此时前轴分配制动转矩较高,再生制动能量回收呈现最大化;当车速升高时,为保证行车安全,转矩分配系数减小,使得转矩分配系数更加靠近I曲线。 图9所示为转矩分配系数工作点分布,从图中可以看出,所得前后轴转矩分配点均位于I曲线和ECE R13法规边界线之间,满足了制动的最基本要求。 4 仿真验证 为验证基于NSGA-II算法的分布式驱动电动汽车制动转矩分配控制策略的有效性,选用MATLAB/Simulink和VPAT联合仿真对算法模型进行验证。选择全球统一轻型车辆测试循环(World Light Vehicle Test Cycle,WLTC)工况对控制策略进行仿真分析,并与转矩平均分配的控制策略进行对比,搭建硬件在环仿真平台,利用真实控制器对算法的实时性和有效性进行了验证。 4.1 整车系统构型及主要参数 分布式驱动电动汽车系统组成结构如图10所示[22-23]。表2为本文研究车辆的技术参数。 4.2 制动安全性验证 以理想的转矩分配系数为目标,实际制动转矩分配系数与理想的转矩分配系数的比值为评价函数。评价函数值越接近1则表示制动转矩分配系数越理想,车辆制动安全性越高;当评价函数值等于1时代表当前转矩分配系数正好位于I曲线上,此时为最理想的转矩分配;評价函数值超过1时,表示车辆在紧急制动时会使后轮先抱死,是应该避免的行驶工况。 以WLTC工况对比两种控制策略,如图11所示。从图中可以看出,基于NSGA-II算法的控制策略,制动转矩分配系数评价函数值在0~1范围内,且大部分制动转矩分配系数点在0.6~1之间,车辆行驶安全可靠。相比之下,制动转矩平均分配的控制策略的制动转矩分配系数评价函数大部分为1.2左右,这可能会导致车辆快速制动时出现侧滑、漂移等危险驾驶情况,且其制动转矩分配系数固定,制动能量回收无法调节,无法进行优化处理,验证了算法的优越性。 4.3 能量回收效率验证 4.3.1 电机制动输出转矩对比 对基于NSGA-II算法的制动转矩分配控制策略与制动转矩平均分配控制策略的下的电机制动转矩对比分析,图12为车辆前轴电机转矩输出对比,图13为车辆后轴电机转矩输出对比。 由图12和图13可以看出,对于前轴电机,基于NSGA-II控制策略的电机制动转矩高于平均分配的控制策略的电机制动转矩;对于后轴电机,基于NSGA-II控制策略的输出制动转矩低于平均分配的控制策略。转矩平均分配控制策略的前后轴输出制动转矩相同,再生制动功率也相同。基于NSGA-II控制策略的前轴电机输出制动转矩高于后轴电机,前轴再生制动功率也高于后轴。 4.3.2 电机制动效率对比 对两种控制策略下的电机制动工作效率进行对比分析,图14所示为前轴电机制动效率工作点对比,图15所示为后轴电机制动效率工作点对比。表3所示为电机制动效率工作点统计数据。 从图中可以看出,基于NSGA-II算法的制动转矩分配控制策略前轴电机制动时的高效区工作点更加密集,前轴电机效率工作点大于0.8的区域约占51.68%,而制动转矩平均分配策略仅占约31.41%;两种控制策略下的后轴电机制动高效区工作点百分比接近。但从整体看,基于NSGA-II算法的控制策略电机制动效率大于0.8的区域的比制动转矩平均分配的提高了9.51百分点。 4.3.3 车辆能耗对比 为进一步验证基于NSGA-II算法的制动转矩分配控制策略的优越性,对两种控制策略下的车辆能量消耗、制动能量回收量以及电池SOC的变化进行了对比。图16所示为WLTC循环工况下两种控制策略的电池SOC的变化。表4所示为两种控制策略下能耗特征对比,其中能量回收率定义为再生制动能量与一个循环工况中的总消耗电量的比值。 从图16中可以看出,基于NSGA-II算法的制动转矩分配控制策略的SOC下降趋势减缓,SOC终值高出0.319百分点,整车能量消耗量减少了0.146 kW·h,再生制动能量提高了526 kJ,因此,在其它条件相同的情况下,基于NSGA-II算法的制动转矩分配控制策略能量回收效率提高了4.71百分点。 4.3.4 硬件在环测试 采用NI公司的实时仿真机模拟分布式驱动整车模型,仿真机采用上下位机结构,上位机采用Windows操作系统的笔记本电脑,下位机采用cPCI/PXI/PXLe总线的工控机机箱,处理器板卡上运行Linux实时操作系统,保证模型运行的高实时性。将VPAT仿真模型下载至NI实时仿真机中,控制算法下载到TTC200整车控制器中,保证了模型构建和代码生成、代码编译、实时仿真机操作等功能。硬件在环测试系统构成如图17所示。 采用WLTC循环工况进行硬件在环测试,图18所示为电脑仿真测试环境与硬件在环测试环境下SOC变化曲线。测试结果表明,算法满足需求,硬件在环测试结果与仿真验证结果基本相同,验证了算法的有效性和实时性。 5 结束语 本文针对分布式驱动电动汽车制动能量回收控制策略进行了研究,提出了基于NSGA-II算法的制动转矩分配控制策略,从Pareto前沿优化集中选出符合当前工况的最优转矩分配系数,基于NSGA-II算法的制动转矩分配控制策略对比制动转矩平均分配控制策略进行了对比分析,并进行了硬件在环测试,验证了算法的有效性和实时性。 在安全性方面,基于NSGA-II算法的制动转矩分配控制策略对比制动转矩平均分配控制策略,其转矩分配系数符合汽车理论以及法规的需求,并更加接近理想的转矩分配系数。 在能量回收率方面,基于NSGA-II算法的制动转矩分配控制策略对比制动转矩平均分配控制策略,在WLTC工况下,对比电机高效区工作点数量提升9.51百分点,车辆再生制动能量回收率提高了4.71百分点。 参 考 文 献 [1] 彭之川. 分布式驱动电动汽车控制策略研究[D]. 北京: 北京交通大学, 2015. PENG Z C. Study on Control Strategy of Distributed Driving Electric Vehicle[D]. Beijing: Beijing Jiaotong University, 2015. [2]唐自强. 分布式驱动电动汽车驱动控制策略研究[D]. 西安: 長安大学, 2017. TANG Z Q. Research on Driving Control Strategy for Distributed Driving Electric Vehicle[D]. Xian: Chang an University, 2015. [3] DE P S, CAMOCARDI P, SORNIOTTI A, et al. Torque-Fill Control and Energy Management for A Four-Wheel-Drive Electric Vehicle Layout With Two-Speed Transmissions[J]. IEEE Transactions on Industrial Electronics, 2017, 53(1): 447-458. [4] ZHANG X D, GOHLICH D, LI J Y. Energy-Efficient Toque Allocation Design of Traction and Regenerative Braking for Distributed Drive Electric Vehicles[J]. IEEE Transactions on Vehicular Technology, 2018: 285-289. [5] XU S W, ZHAO X, YANG N X, et al. Control Strategy of Braking Energy Recovery for Range-Extended Electric Commercial Vehicles by Considering Braking Intention Recognition and Electropneumatic Braking Compensation[J]. Energy Technology, 2020, 8(9): 2000407. [6] 张民安, 储江伟, 李春雷. 结合遗传算法的四轮毂电机电动汽车制动能量回收控制策略[J]. 重庆理工大学学报(自然科学版), 2021, 35(10): 77-84. ZHANG M A, CHU J W, LI C L. Control Strategy of Braking Energy Recovery for Electric Vehicle with Four In - Wheel Motors Combined with Genetic Algorithm[J]. Journal of Chongqing University of Technology (Natural Science), 2021, 35(10): 77-84. [7] 许洋, 周奎, 杨亚会, 等. 轮毂驱动电动汽车再生制动能量分配策略研究[J]. 重庆理工大学学报(自然科学版), 2023, 37(2): 69-76. XU Y, ZHOU K, YANG Y H, et al. Research on the Regenerative Braking Energy Distribution Strategy of Hub Driven Electric Vehicles[J]. Journal of Chongqing University of Technology (Natural Science), 2023, 37(2): 69-76. [8] 王彦. 基于ECE R13的纯电动汽车再生制动力分配策略研究[J]. 机械工程与自动化, 2019(1): 21-23. WANG Y. A Study of Regenerative Braking Force Distribution Strategy for Battery Electric Vehicle Based on ECE R13[J]. Mechanical Engineering & Automation, 2019(1): 21-23. [9] ZHU Y Y, WU H, ZHEN C C. Regenerative Braking Control Under Sliding Braking Condition of Electric Vehicles with Switched Reluctance Motor Drive System[J]. Energy, 2021, 230: 120901. [10] XING C, ZHU Y Y, WU H. Electromechanical Coupling Braking Control Strategy Considering Vertical Vibration Suppression for Vehicles Driven by In-Wheel Motors[J]. IEEE/ASME Trans. Mechatronics, 2022, 27(6): 5701-5711. [11] MA H P, ZHANG Y J, SUN S Y, et al. A Comprehensive Survey on NSGA-II for Multi-Objective Optimization and Applications[J]. Artificial Intelligence Review, 2023, 62(3): 1001-1038. [12] 邓涛, 林椿松, 李亚南, 等. 基于Pareto原理的HEV能量控制參数NSGA-II多目标优化的研究[J]. 汽车工程, 2016, 38(5): 532-537. DENG T, LIN C S, LI Y N, et al. A Research on NSGA-II Multi-Objective Optimization for HEV Energy Management Parameters Based on Pareto Principle[J]. Automotive Engineering, 2016, 38(5): 532-537. [13] 张传正. 基于驾驶意图识别的纯电动汽车整车控制策略研究[D]. 西安: 长安大学, 2020. ZHANG C Z. Research on Control Strategy of Battery Electric Vehicle Based on Driving Intention Recognition[D]. Xian: Changan University, 2020. [14] 向佳豪. 纯电动汽车再生制动策略研究[D]. 秦皇岛: 燕山大学, 2022. XIANG J H. Research On Regenerative Braking Strategy Of Pure Electric Vehicles[D]. Qinhuangdao: Yanshan University, 2022. [15] 童成前, 何仁, 周燕, 等. 基于ECE法规的多轴汽车剩余制动性能分析[J]. 汽车工程, 2011, 33(8): 689-693. TONG C Q, HE R, ZHOU Y, et al. Analysis on the Residual Braking Performance of Multi-Axle Vehicles Based on ECE Regulation[J]. Automotive Engineering, 2011, 33(8): 689-693. [16] 吴浩. 开关磁阻电机驱动电动汽车复合制动协调控制[D]. 天津: 天津科技大学, 2021. WU H. Compound Braking Coordination Control of Electric Vehicles with Switched Reluctance Motor Drive System[D]. Tianjin: Tianjin University of Science and Technology, 2021. [17] 潘盛辉, 许平, 宋仲达, 等. 基于改进NSGA-II算法的纯电动汽车机电复合制动控制策略研究[J].现代电子技术, 2018, 41(7): 97-101. PAN S H, XU P, SONG Z D, et al. Research on Modified NSGA?Ⅱ Algorithm Based Electro? Mechanical Hybrid Braking Control Strategy of Electric Vehicle[J]. Modern Electronics Technique, 2018, 41(7): 97-101. [18] 李少波, 杨观赐. 进化算法与混合动力系统优化[M]. 北京: 机械工业出版社, 2013. LI S B, YANG G C. Evolutionary Algorithms and Optimization of Hybrid System[M]. Beijing: Mechanical Industry Press, 2013. [19] 梁俊毅, 张建龙, 马雪瑞, 等. 基于多混沌算子遗传算法的混合动力汽车控制策略优化[J]. 上海交通大学学报, 2015, 45(4): 442-456. LIANG J Y, ZHANG J L, MA X R, et al. Control Strategy Optimization for Hybrid Electric Vehicle Based on Multi-Chaotic Operators Genetic Algorithm[J]. Journal of Shanghai Jiaotong University, 2015, 45(4): 442-456. [20] 张珠让, 周南. 混合动力汽车能量管理的自适应交叉 NSGA-II优化[J]. 机械设计与制造, 2022(2): 213-218. ZHANG Z R, ZHOU N. Hybrid Electric Vehicle Energy Management Parameters Optimization Based on Adaptive Crossover NSGA-Ⅱ Algorithm[J]. Machinery Design & Manufacture, 2022(2): 213-218. [21] 肖建, 赵涛. T-S模糊控制综述与展望[J]. 西南交通大学学报, 2016, 51(3): 462-474. XIAO J, ZHAO T. Overview and Prospect of T-S Fuzzy Control[J]. Journal of Southwest Jiaotong University, 2016,51(3): 462-474. [22] 王少帅, 分布式驱动电动汽车直流电机驱动控制系统研究[D]. 西安: 长安大学, 2019. WANG S S, Research on DC Motor Drive Control System of Distributed Drive Electric Vehicle[D]. Xi an: Chang an University, 2019. [23] 楊路伟. 分布式驱动电动汽车整车控制策略研究[D]. 西安: 长安大学, 2019. YANG L W. Research on Vehicle Control Strategy of Distributed Drive Electric Vehicle[D]. Xi an: Chang an University, 2019. (责任编辑 王 一) 修改稿收到日期为2023年11月7日。
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16 00:28:32
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
四川冶金(2018年1期)2018-09-25 02:39:26
消费导刊(2018年10期)2018-08-20 02:57:02
海外星云(2016年17期)2016-12-01 04:18:42
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
自动化博览(2014年10期)2014-02-28 22:33:55