公路隧道场景下V2V信道测量及特性分析
2024-06-03 14:40曾莉
交通科技与管理 2024年6期
曾莉
摘要 为探索公路隧道运行环境下V2V信道受车辆衍射、隧道内壁反射、附属设施布置密集影响下的传播特性,文章在可视距(LOS)、部分视距(OLOS)、不可视距(NLOS)场景下利用宽带信道探测器并使用5.2 GHz的载波频率和带宽,对隧道内V2V信道展开测量。根据实测数据,构建起不同场景下接收信号幅值衰落分布及路径损耗模型,对V2V信道衰落特性展开分析。结果显示,NLOS场景下阴影衰落和路径损耗指数均较大,其接收信号幅度衰落服从瑞利分布,均方根延迟扩展符合对数正态分布,NLOS场景的时域弥散也更大。
关键词 隧道;场景;V2V信道;测量;特性
中图分类号 U453文献标识码 B文章编号 2096-8949(2024)06-0025-03
0 引言
在建设智慧交通的过程中,车联网发挥着关键性作用,通过人、车、路、环境之间的有机结合,提升交通运行的安全性与效率性。随着隧道建设规模的扩大,隧道场景下车辆对车辆(Vehicle-to-vehicle,V2V)的通信便成为智慧交通的重要组成部分。所以,深入研究隧道场景下V2V信道特性对于建设智慧交通具有积极意义。传统的信道模型对V2V信道并不适用,该文主要在5.2 GHz频段下展开隧道环境V2V信道测量,并根据交通运行实际,将测量分成可视距(LOS)、部分视距(OLOS)、不可视距(NLOS)等类型,展开大小尺度衰落特性分析和模型构建,为公路隧道场景下V2V信道测量、道路信息高质量传递及智慧交通建设提供参考。
1 通信场景及仿真环境
隧道结构属于内部墙壁粗糙、空间有限的狭长形半封闭空间,其结构内部电波传播过程会受到隧道尺寸、截面形状、收发距离、附属设施、地质条件[1]等的影响。为此,在构建隧道信道模型时,必须保证通信场景。
与蜂窝网络相比,V2V具有高移动性和无线信道时变性,广义平稳性较差。场景、天线及频段部署、车辆等均为V2V通信的影响因素。高速公路隧道中收发车辆和周围行车均处于不断变化状态,对电磁信道的影响较大。考虑OLOS部分视距场景较为接近现实,故该场景细分十分必要,也为无线系统开发提供了良好的仿真环境。
2 信道测量
2.1 测量环境
测量活动在某高速公路K441+058~K443+011桩号段的隧道中展开,该隧道长1.953 km,宽2×14 m,高4.8 m,为单向双车道结构,其中包括2个标准宽度的行车道和1个应急车道,隧道为矩形断面。该隧道周围树木、车流量、交通标示、渐变侧墙等散射体众多,增大了测量信道的复杂性。
V2V信道测量的移动端为1辆越野车和1辆厢式货车;RUSK-DLR宽带信号探测器设备主要为德国进口,用于信道时频域特性测量。车身长4.866 m,宽
1.984 m,高1.977 m的奔驰越野车为发射端搭载平台;车身长5.37 m,宽1.928 m,高1.88 m的奔驰厢式货车为接收端搭载平台。在以上发射车和接收车车顶固定放置收发全向天线和传感器,车内配置收发设备和摄像头等。施测期间,接收车始终运行于信号发射车前方,两车行驶速度均应控制在10~20 m/s范围内,因路况等方面的影响,发射车和接收车间的实际距离实时变动。
为保证各时刻天线位置均能被准确获取,在以上测试车辆上均加装GNSS接收器,以展开GPS卫星信号的实时接收。以上定位技术的信号传输在隧道内部运行环境下存在滞后性,故在测试车辆上同时搭载LIDAR激光雷达及MTI-G-710跟踪单元,在确保公路隧道内信息平稳收发的同时,还能展开隧道内部运行特征数据的测量及记录,对隧道内车辆进行定位。
在施测过程开始前还应进行时钟校对,以保证IMU单元时钟和GPS时钟运行的同步性;此后对公路隧道内车辆的行进速度、运行状态等展开测量。考虑IMU单元具备测量误差累积属性,为保证测值准确,还应借助激光雷达展开测试过程及结果监督。
2.2 发射机与接收机间的测量场景
2.2.1 LOS场景
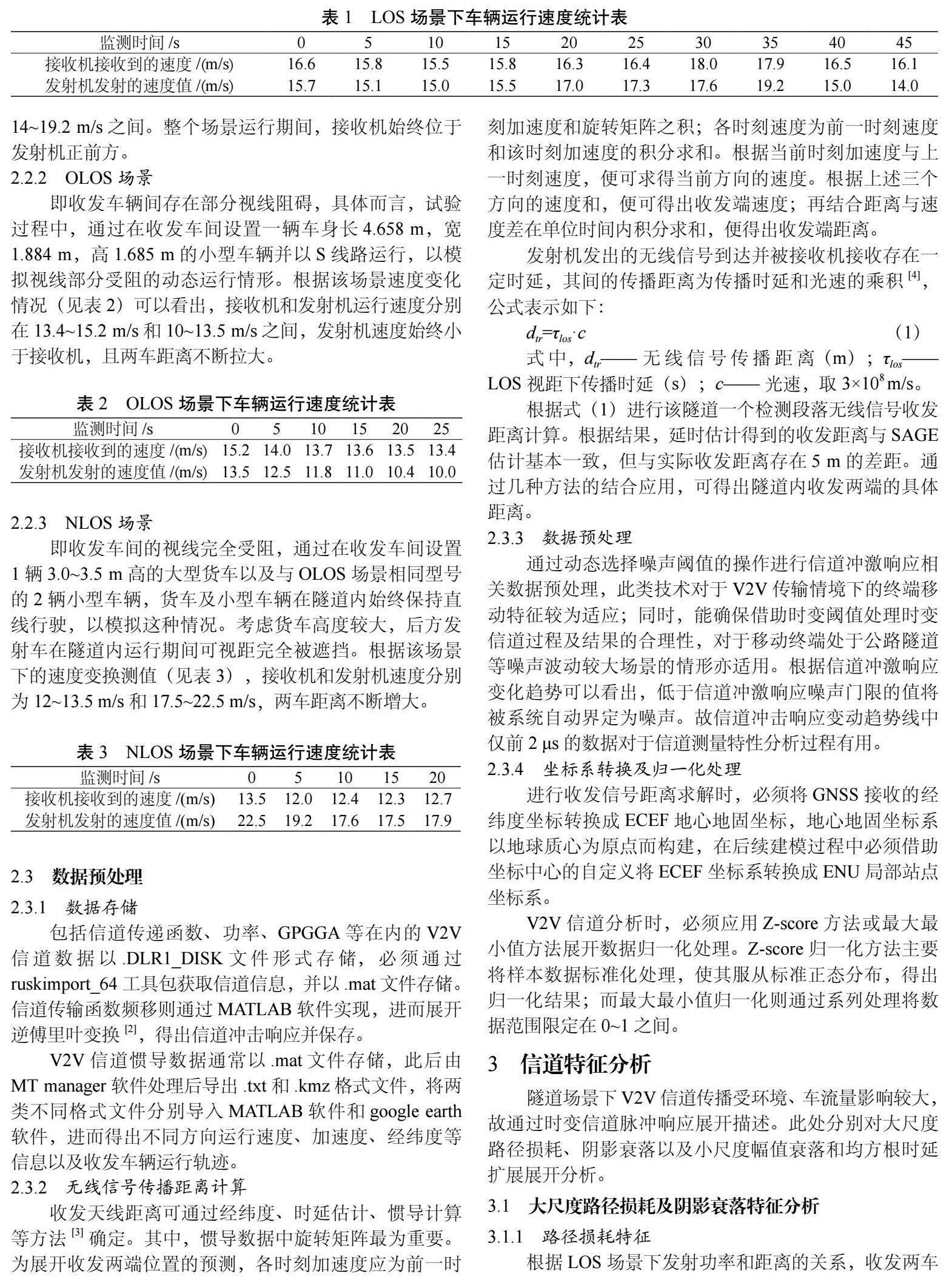
即收发车间无视线阻碍,分量主要表现为直射类型。此次检测过程中总共选取45 s数据,通过比较该场景下两车运行速度(见表1)可以看出,接收机运行速度始终保持在15.5~18 m/s之间,而发射机运行速度則维持在14~19.2 m/s之间。整个场景运行期间,接收机始终位于发射机正前方。
2.2.2 OLOS场景
即收发车辆间存在部分视线阻碍,具体而言,试验过程中,通过在收发车间设置一辆车身长4.658 m,宽1.884 m,高1.685 m的小型车辆并以S线路运行,以模拟视线部分受阻的动态运行情形。根据该场景速度变化情况(见表2)可以看出,接收机和发射机运行速度分别在13.4~15.2 m/s和10~13.5 m/s之间,发射机速度始终小于接收机,且两车距离不断拉大。
2.2.3 NLOS场景
即收发车间的视线完全受阻,通过在收发车间设置1辆3.0~3.5 m高的大型货车以及与OLOS场景相同型号的2辆小型车辆,货车及小型车辆在隧道内始终保持直线行驶,以模拟这种情况。考虑货车高度较大,后方发射车在隧道内运行期间可视距完全被遮挡。根据该场景下的速度变换测值(见表3),接收机和发射机速度分别为12~13.5 m/s和17.5~22.5 m/s,两车距离不断增大。
2.3 数据预处理
2.3.1 数据存储
包括信道传递函数、功率、GPGGA等在内的V2V信道数据以.DLR1_DISK文件形式存储,必须通过ruskimport_64工具包获取信道信息,并以.mat文件存储。信道传输函数频移则通过MATLAB软件实现,进而展开逆傅里叶变换[2],得出信道冲击响应并保存。
V2V信道惯导数据通常以.mat文件存储,此后由MT manager软件处理后导出.txt和.kmz格式文件,将两类不同格式文件分别导入MATLAB软件和google earth软件,进而得出不同方向运行速度、加速度、经纬度等信息以及收发车辆运行轨迹。
2.3.2 无线信号传播距离计算
收发天线距离可通过经纬度、时延估计、惯导计算等方法[3]确定。其中,惯导数据中旋转矩阵最为重要。为展开收发两端位置的预测,各时刻加速度应为前一时刻加速度和旋转矩阵之积;各时刻速度为前一时刻速度和该时刻加速度的积分求和。根据当前时刻加速度与上一时刻速度,便可求得当前方向的速度。根据上述三个方向的速度和,便可得出收发端速度;再结合距离与速度差在单位时间内积分求和,便得出收发端距离。
发射机发出的无线信号到达并被接收机接收存在一定时延,其间的传播距离为传播时延和光速的乘积[4],公式表示如下:
dtr=τlos·c (1)
式中,dtr——无线信号传播距离(m);τlos——LOS视距下传播时延(s);c——光速,取3×108 m/s。
根据式(1)进行该隧道一个检测段落无线信号收发距离计算。根据结果,延时估计得到的收发距离与SAGE估计基本一致,但与实际收发距离存在5 m的差距。通过几种方法的结合应用,可得出隧道内收发两端的具体距离。
2.3.3 数据预处理
通过动态选择噪声阈值的操作进行信道冲激响应相关数据预处理,此类技术对于V2V传输情境下的终端移动特征较为适应;同时,能确保借助时变阈值处理时变信道过程及结果的合理性,对于移动终端处于公路隧道等噪声波动较大场景的情形亦适用。根据信道冲激响应变化趋势可以看出,低于信道冲激响应噪声门限的值将被系统自动界定为噪声。故信道冲击响应变动趋势线中仅前2 μs的数据对于信道测量特性分析过程有用。
2.3.4 坐标系转换及归一化处理
进行收发信号距离求解时,必须将GNSS接收的经纬度坐标转换成ECEF地心地固坐标,地心地固坐标系以地球质心为原点而构建,在后续建模过程中必须借助坐标中心的自定义将ECEF坐标系转换成ENU局部站点坐标系。
V2V信道分析时,必须应用Z-score方法或最大最小值方法展开数据归一化处理。Z-score归一化方法主要将样本数据标准化处理,使其服从标准正态分布,得出归一化结果;而最大最小值归一化则通过系列处理将数据范围限定在0~1之间。
3 信道特征分析
隧道场景下V2V信道传播受环境、车流量影响较大,故通过时变信道脉冲响应展开描述。此处分别对大尺度路径损耗、阴影衰落以及小尺度幅值衰落和均方根时延扩展展开分析。
3.1 大尺度路径损耗及阴影衰落特征分析
3.1.1 路径损耗特征
根据LOS场景下发射功率和距离的关系,收发两车间的距离先增大后减小,两车距离在16~35 m之间;接收功率则在43~28 dBm之间变化。根据LOS场景下对数距离路径损耗拟合结果可知,由于隧道内波导效应的存在,随着对数距离的缩短,与之相对应的接收功率速度表现出显著减缓趋势。故在距离相同时,自由空间路径损耗比隧道内路径损耗大3 dB;对数距离模型与ABG模型拟合出的LOS场景下数据路径损耗指数为1.265 2,阴影衰落最大似然估計值为1.315 5 dB。
根据OLOS场景下发射功率和距离的关系,收发车间的距离在动态运行过程中始终呈增大趋势,两车距离最大达到105 m;接收功率则表现出相应减小的局面,取值主要位于?55~?35 dBm区间。应用ABG模型和Log-Distance损耗模型展开隧道内运行路径损耗指数计算,结果为1.302 1,相对应的阴影衰落标准差取1.889 1 dB。由此可见,对于公路隧道场景中距离相同的情况,自由空间损耗明显超出隧道内损耗。
由NLOS场景下发射功率和距离的动态关系可知,信号收发车间的距离始终减小,两车距离在最小达到220 m;接收功率则在?63~?50 dBm之间变化。按照与OLOS场景下相同的分析思路所得到的ABG模型和Log-Distance损耗模型路径损耗指数为1.521 3,阴影衰落标准差则按照2.209 8 dB取值。
综上,NLOS场景下路径损耗指数比其余场景大,但比自由空间路径损耗指数小,主要原因在于公路隧道内波导效应造成路径损耗增长速率的减缓;ABG模型与对数距离模型拟合效果基本一致。
3.1.2 阴影衰落
通过对不同场景下阴影衰落概率密度的比较,NLOS场景阴影衰落标准差比LOS场景和OLOS场景大1.0 dB和0.5 dB;三种场景下阴影衰落实测数据概率密度拟合较好,且LOS场景阴影衰落幅值最高,NLOS场景阴影衰落范围最广。由此表明,大货车在公路隧道内部运行期间所引起的路径损耗和阴影衰落最为明显,但由于隧道环境中波导效应的存在,LOS场景、OLOS场景及NLOS场景下阴影衰落的差距并无自由空间环境下明显。
3.2 小尺度幅值分布及时延扩展特征分析
3.2.1 幅值拟合分布
在展开信道小尺度幅值衰落分析前必须对接收信号幅值进行归一化处理,去除大尺度效应。V2V信道中WSS窗口大小主要受收发车测量间隔和运行速度的影响,故结合车辆运行速度,将归一化窗口设计为350个连续样本施测。采用Nakagami-m、Weibull、Rayleigh、莱斯、对数正态、正态分布等进行V2V信道小尺度幅值衰落特性描述,并得出相应的拟合结果。
检验统计量按照式(2)[5]确定:
(2)
式中,ρ——检验统计量,取值介于0~1之间,且越小越好;——上确界;——样本累积分布函数;F(x)——服从理论分布样本的累积分布函数。
根据拟合优度结果,LOS场景下正态与莱斯分布对接收信号拟合效果较好,Rayleigh分布的检验统计量值最大,拟合效果不良。OLOS场景下莱斯和Weibull分布的接收信号幅值拟合效果好,而对数正态分布拟合效果差。NLOS场景下Rayleigh和Nakagami-m的接收信号幅值拟合效果好,对数正态分布拟合效果差。
3.2.2 均方根时延扩展
时域弥散主要因传播环境改变及多径到达时间的不同而引起。时域弥散会引起无线信号码间干扰,造成测距误差。接收路径功率可通过功率时延谱描述。根据三种场景下功率时延谱检测结果,LOS场景主路径始终存在,时延随着收发车距离的缩小而减小;OLOS和NLOS场景下主路径微弱,接收功率强度相对较小。可见,大型车辆等障碍物使接收信号明显降低。隧道内静止的散射体会释放高延迟信号反射径;与信号收发车保持相对速度的其余通信车辆还会引起平行分量。
时域弥散特征可通过RMSDS定量分析。根据各信道脉冲响应RMSDS累积分布函数,三种场景下均方根时延扩展均值分别为65.649 8 ns、166.066 7 ns、505.992 5 ns。
4 结论
该文主要依托公路隧道工程实际,对隧道场景下V2V通信大尺度和小尺度衰落特征展开研究,根据实测结果构建起LOS、OLOS、NLOS场景下路径损耗模型,主要得出以下结论:NLOS场景路径损耗指数比其余两个场景大,但因隧道内波导效应,三种场景下路径损耗指数均比自由空间小。NLOS场景下大客车引起的阴影衰落达到2 dB,而其余场景下阴影衰落基本一致,意味着信号遮挡车辆尺寸对阴影衰落变化有较大影响。小尺寸拟合中NLOS场景接收功率服从瑞利分布,其余场景接收功率则服从莱斯分布。车辆遮挡引起的时域弥散仍较大。
参考文献
[1]何亦昕, 王大伟, 黄方慧, 等. 空地协同车联网V2I与V2V混合传输机制设计[J]. 移动通信, 2022(6): 24-30.
[2]邓炳光, 秦启航, 孟凡军. 隧道场景下非平稳多簇V2V信道建模与分析[J]. 无线电工程, 2022(8): 1361-1367.
[3]李一兵, 王宁馨, 吕威. 蜂窝车联网中基于服务异构性的V2V通信资源分配算法研究[J]. 电子与信息学报, 2023
(1): 235-242.
[4]宋吉婷, 王威, 孙郁哲, 等. 矩形隧道下存在车辆遮挡的V2V信道测量与分析[J]. 哈尔滨工业大学学报, 2022(5): 117-123.
[5]唐登洪, 席曉莉, 范倩莹. 基于隧道多散射信道的车载通信系统建模[J]. 电子学报, 2021(5): 887-893.
猜你喜欢
课堂内外(小学版)(2023年4期)2023-09-22
现代畜牧科技(2021年4期)2021-07-21
流行色(2020年9期)2020-07-16
小读者(2019年24期)2019-01-10
家庭影院技术(2018年9期)2018-11-02
CHIP新电脑(2017年6期)2017-06-19
新闻界(2016年15期)2016-12-20
考试周刊(2016年93期)2016-12-12
小天使·四年级语数英综合(2016年11期)2016-11-29
今传媒(2016年9期)2016-10-15