基于UAV的高架轻轨服役状态自动化监测方法研究
2024-06-03 14:40吕宛容钱夏清
交通科技与管理 2024年6期
吕宛容 钱夏清
摘要 高架轻轨服役状态对轨道交通的安全运营有着至关重要的影响,传统巡检方式存在工作效率低,检测精度低等问题。文章采用无人机摄影测量技术(UAV),构建高架轻轨交通设施的三维虚拟实景数字模型,采用数字图像识别技术与点云提取测量技术,完成对裂缝图像的去噪、增强以及检测后路面裂缝图像的特征提取,实现高架轻轨的桥面病害识别方法与病害自动化检测。研究结果将大幅降低传统巡检方式的人力消耗、提高检测精度,同时可以在营运期同步完成巡检。
关键词 UAV;三维模型;图像识别;特征提取
中图分类号 U446文献标识码 A文章编号 2096-8949(2024)06-0013-03
0 引言
我国高架道路的迅速发展与经济的发展相辅相成、密不可分。与道路的建设相比,我国的道路管理手段稍显落后,技术水平也有限,道路建设好之后,后期的养护工作没有达到一定的水准。高架轻轨服役状态对轨道交通的正常运营有着至关重要的作用,为了确保其安全性和可维护性,需定期进行系统的结构评估和干预。但由于其结构大、尺寸大,检查耗时、昂贵、危险,这加剧了对智能化精准监测高架轻轨服役状态的需求[1-2]。
高架轻轨服役状态的监测可以确保轨道交通的正常运营。恶劣天气、道路过载、自然老化等因素可以引起高架产生裂缝、空洞等不良后果。其中最为严重的是裂缝,不仅会影响高架道路的耐久性,还会危害社会安全。
近年来,由于无人机的数字摄影测量技术高效、精准、价格低廉,在国际上被广泛用于大型建筑的服役状态检测。Khaloo等人对人工检测和配备不同摄像机的无人机进行了直接比较,发现使用无人机可以显著减少检测时间[1]。崔东顺等人提出了可见光航拍图像水上桥梁检测算法[3]。
随着计算机技术与自动化技术的不断发展,国内外学者针对高架轻轨检测提出了不少新的检测方法,常用的无损检测方法有超声波检测技术、光纤传感检测技术和基于图像处理的检测技术[4-7]。王耀东[8]等为了提高裂缝目标的检测准确度,提出一种基于裂缝与伪裂缝纹理差异性的计算模型,能够有效地滤除伪裂缝的干扰。李清泉[9]等通过获取裂缝的潜在种子点,采用基于最小代价路径搜索的算法,实现裂缝的提取。徐威[10]等结合裂缝纹理的不均匀性及各向异性,提出一种多特征融合与格式塔理论相结合的路面裂缝检测算法,能够有效地削弱噪声点与伪裂缝的干扰。Prasanna[11]等为实现对裂缝图片的有效分类,提出一种基于空间调整的多特征分类器——STRUM分类器,该分类器将裂缝图片的灰度及灰度的梯度特征与尺度空间特征相结合。Valenca[12]等提出一种数字图像处理技术与地面激光扫描技术相结合的MCrack-TLS法,该算法通过地面激光扫描技术提供的桥梁全局信息,构建出含裂缝特征的桥梁3D模型,实现对桥梁裂缝进行可视化定位。Shi[13]等提出一种基于结构化随机森林的CrackForest法,该算法可以很好地抑制噪声的影响,但是图像分割的阈值需要人工确定。
为了智能检测高架轻轨的服役状态,该文基于UAV,通过3Dsmart、PhotoScan、Pix4D等软件以及C++和c#winform等编程语言,构建高架轻轨交通设施的三维虚拟实景数字模型,采用数字图像特征提取技术与点云提取测量技术,研究高架轻轨的桥梁结构病害数字化识别方法与病害量化检测技术。
1 高架轻轨服役状态数据采集
1.1 基于UAV数据采集
羊山公园站是南京地铁2号线的车站,位于南京市栖霞区仙林大学城仙林大道与仙境路交叉路口东北侧,为高架二层鱼腹形岛式车站,东北—西南走向,总建筑面积5 162 m2,设有2个出入口。该文选取羊山公园站作为高架轻轨检测对象。
利用无人机进行摄影测量,其基本原理是将三维成像、影像处理、模式识别、图像插值等原理结合起来以提取数字化图像,这样做的好处是可以快速获取图像信息。
该研究主要使用了DJI M210四轴航拍无人机飞行平台、Pix4D数据采集与处理软件、DJI ZENMUSE X5S云台相机。利用无人机航拍技术,优化飞行路线、降低飞行抖动、提高成像质量,完成大量高架轻轨图像的拍摄。无人机拍摄受天气、风力影响较大,为了保证成像质量,选取了一个晴朗无风的天气进行拍摄。并在拍摄时与高架轻轨将保持5 m以上的安全距离。工作流程如下:
1.1.1 选定测区范围
首先需要观察测区环境,起飞点需尽量处于测区中心位置,最远距离不超过150 m,距离过远受到无人机续航限制,可能无法一次飞完。无人机单次飞行的测区范围一般不超过0.5 km2。
1.1.2 测绘设备准备
①DJI M210无人机与DJI ZENMUSE X5S云台相机组装与连接测试。②海星达H32 GNSS接收機组装与连接测试。③设定飞行高度为200 m。④飞行前安全检查。
1.1.3 GPS控制点标定
在测区范围内均匀布置8个GPS控制点,并对这8个大地坐标点进行GPS测量。采用的坐标系统:平面采用WGS_1984_UTM_Zone_48N,高程采用WGS_1984高程基准,测得GPS控制点坐标。
1.1.4 飞行航线规划
利用Pix4Dcapture软件对测区的飞行路线进行规划,选择合适的航线密度保证图像重叠度。
1.1.5 航测采集
启动无人机,进入自动飞行采集模式。航测时,需要随时监视无人机的飞行状态,出现问题时及时作出应急处理。
1.1.6 数据校验与重采
在航飞任务完成后,进行现场数据检查。当发现照片重叠度不足或者重点检测部位的照片拍摄质量偏低时,及时单独进行补飞拍摄。
1.2 图像数据预处理
由于無人机航拍图像受到天气、光线变化的影响,当从多个角度拍摄桥梁时,各个角度的自然光线有一定区别,导致拍摄的照片在亮度等参数上差别较大。因此,为了保证后续建模的顺利进行,要先对拍摄的照片进行处理。
照片的处理可以利用Matlab,通过对比直方图和参考图来调整亮度等参数,使两者变得类似,解决不同角度照片的光照问题。
2 构建高架轻轨精细三维模型
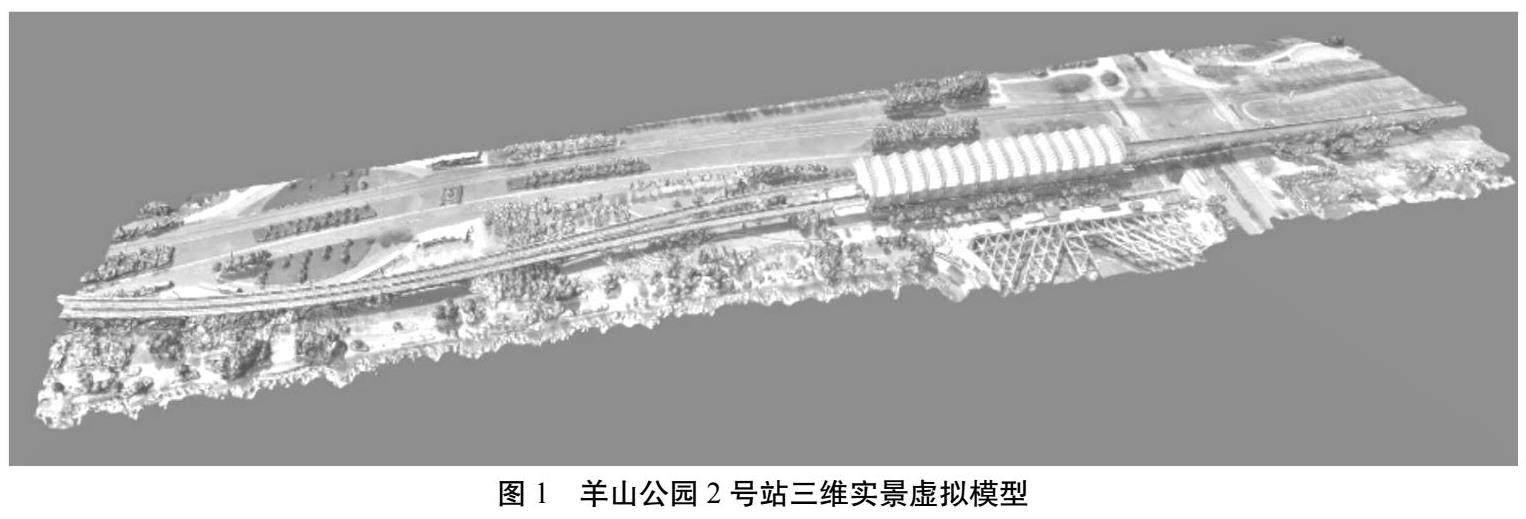
Pix4Dmapper具有快速、精确、自动化等特点。利用采集的图像进行高架轻轨的三维精细化建模,并采用CloudCompare软件实现采集的点云数据和图像数据的展示、除噪、数据分割和合并等操作。
基于精细化三维模型,采用Unity3D软件实现了三维模型可视化,如图1所示,在精度足够的条件下可以直观地展示高架轻轨存在的病害。
3 裂缝特征自动化提取
3.1 裂缝特征值分析
由于图像采集的环境具有不确定性,采集过程易受环境影响,未经处理的裂缝图像通常会含有噪声等信息。这些噪声的存在会影响后续图像信息处理,对产生的结果也有一定影响。因此,在进行下一步前要对图像进行预处理,通过几何校正、去噪等方式,把其中的多余信息删去,只保留需要的信息。为了改善图像质量,必须对采集的高架裂缝图像进行去噪处理。
颜色、形状和纹理是通常提取的三种最常见的基本特征。其中纹理特征表现直观,可以描述图像同质现象的视觉特征。所以可以通过纹理特征,利用灰度空间的分布规律对图像进行预处理。
3.2 裂缝特征自动化提取
图像的特征包括颜色、形状等视觉特征,也包括直方图等信息化特征。路面裂缝图像也具有特征。通常情况下,包括裂缝的尺寸、裂缝的面积、裂缝的类型等。
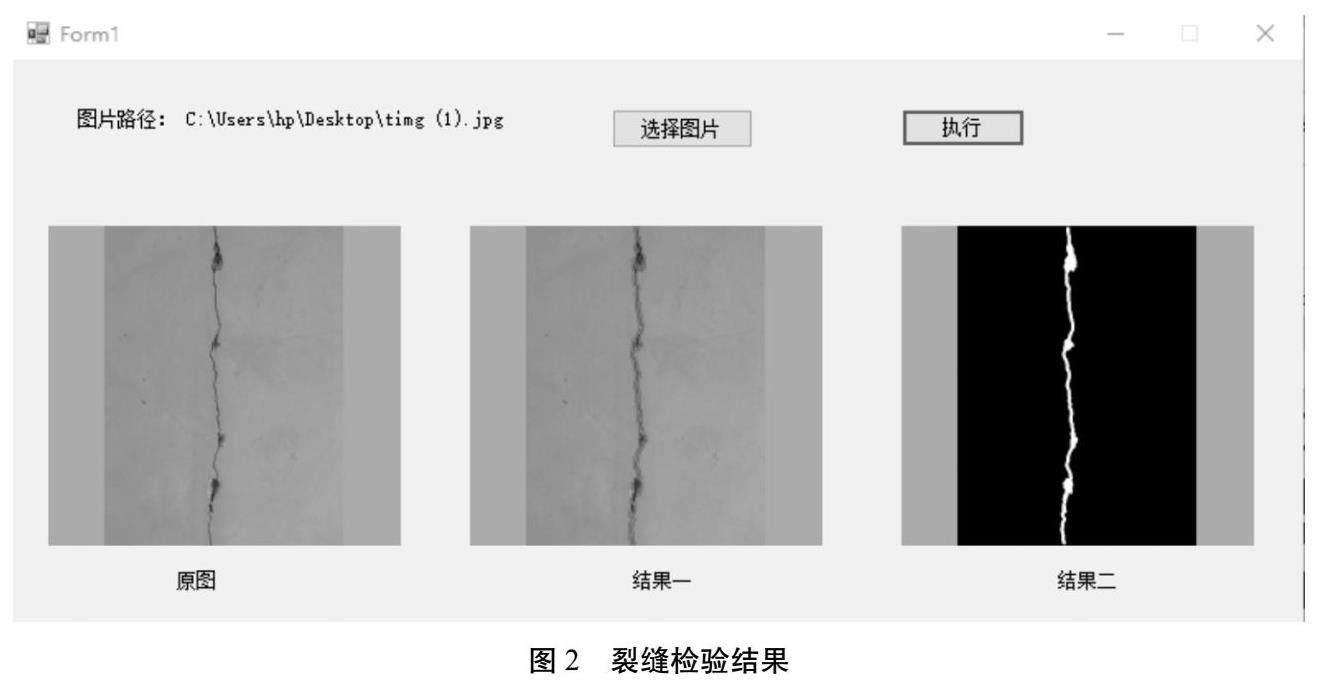
在针对图片数据进行预处理之后,发现缺陷处色阶有明显突变,采用VS编程软件,运用C++、c#winform和OpenCV软件编写一个图片数据处理软件,尝试利用缺陷处纹理特征的突变检测裂缝。经过不断的调试,编写的软件可以比较有效地通过增强缺陷强度、过滤噪声的方式把路面裂缝的缺陷处提取出来,如图2所示,实现对于高架轻轨裂缝的自动化识别。
4 结论
随着时间的推移,高架轻轨的数量正在迅速扩增。高架轻轨服役状态对轨道交通的正常运营有着至关重要的作用。为了确保其安全性和可维护性,需定期进行系统的结构评估和干预。但由于其结构大、尺寸大,传统的检测技术由于其价格高昂、费时费力,逐渐不能满足我国对高架轻轨检测养护的需求。基于无人机的数字摄影测量技术由于其高效、精准、价格低廉,在国际上被广泛用于大型建筑的服役状态检测。但是检查耗时、昂贵、危险,这加剧了对智能化精准监测高架轻轨服役状态的需求。该文得出以下结论:
(1)利用无人机航拍技术,优化飞行路线、降低飞行抖动、提高成像质量,完成大量高架轻轨图像的拍摄。
(2)对已有照片进行优化,利用Smart3D、Cloud-
Compare等软件,构建高架轻轨交通设施的三维虚拟实景数字模型以及点云图像,使得病害的表达更加直观。
(3)通过特征值提取,分析比对,合理提取缺陷的信息,编写特征提取软件,自动化提取道路缺陷,以达到减少人力消耗、降低经济成本且保证安全行车的要求。
参考文献
[1]Khaloo A, Lattanzi D, Cunningham K, et al. Unmanned aerial vehicle inspection of the Placer River Trail Bridge through image-based 3D modelling[J]. Structure and Infrastructure Engineering, 2018(1): 124-136.
[2]商广明. 应用无人机技术进行桥梁检测的探讨分析[J]. 上海公路, 2018(1): 49-51+57+5.
[3]崔东顺. 可见光航拍图像水上桥梁检测算法研究[D]. 北京:北京理工大学, 2015.
[4]任炳兰. 基于matlab 的路面裂缝识别算法研究[D]. 西安:长安大学, 2014.
[5]丁志军, 杜军, 卢彭真. 无损检测技术在道桥工程中的应用与发展[J]. 交通科技与经济, 2005(1): 4-6.
[6]王娜丽. 无损检测技术在公路桥梁测量中的应用[J]. 自动化与仪器仪表, 2017(10): 166-167.
[7]焦彦涛. 无损检测技术在公路桥梁养护管理中的应用[J]. 交通世界, 2017(Z2): 88-89.
[8]王耀东, 朱力强, 史红梅, 等. 基于局部图像纹理计算的隧道裂缝视觉检测技术[J]. 铁道学报, 2018(2): 82-90.
[9]李清泉, 邹勤, 毛庆洲. 基于最小代价路径搜索的路面裂缝检测[J]. 中国公路学报, 2010(6): 28-33.
[10]徐威, 唐振民, 徐丹, 等. 融合多特征与格式塔理论的路面裂缝检测[J]. 计算机辅助设计与图形学学报, 2015(1): 147-156.
[11]Prasanna P, Dana K J, Gucunski N, et al. Automated crack detection on concrete bridges[J]. IEEE Transaction on automation science and engineering, 2016(2): 591-599.
[12]Valenca J, Puente I, Julio E, et al. Assessment of cracks on concrete bridges using image processing supported by laser scanning survey[J]. Construction and Building Materials, 2017, 146: 668-678.
[13]Shi Y, Cui L, Qi Z, et al. Automatic Road Crack Detection Using Random Structured Forests[J]. IEEE Transaction on Intelligent Transportation Systems, 2016(17): 1-12.
猜你喜欢
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
自动化学报(2017年11期)2017-04-04
电脑知识与技术(2016年28期)2016-12-21
电脑知识与技术(2016年26期)2016-11-24
科技视界(2015年25期)2015-09-01
噪声与振动控制(2015年4期)2015-01-01