室内外一体化三维建模技术探索与实现
2024-06-01 11:14:29柯元英沈洋段云飞李豪山威
现代信息科技 2024年4期
柯元英 沈洋 段云飞 李豪 山威


收稿日期:2023-06-20
基金项目:自然资源部第三大地测量队科技支撑项目(2022KJ01,2023KJ02)
DOI:10.19850/j.cnki.2096-4706.2024.04.027
摘 要:针对建筑物室内外建模的不同特点及室内外一体化建模的需求,综合考虑建模效率、精度、成本等因素,开展了基于无人机倾斜摄影测量的大场景三维建模技术及基于设计图的区域室内建模技术探索,实现了无像控点的高精度室外三维模型快速构建,并基于SketchUp构建了具备动态交互效果的室内三维模型,打通了室内外三维建模技术流程,可为三维模型建设及相关应用提供技术参考。
关键词:三维建模;倾斜摄影测量;动态交互;室内外一体化
中图分类号:TP79;P231 文献标识码:A 文章编号:2096-4706(2024)04-0127-05
Exploration and Implementation of Indoor and Outdoor Integrated 3D Modeling Technology
KE Yuanying, SHEN Yang, DUAN Yunfei, LI Hao, SHAN Wei
(The Third Geodetic Team of Ministry of Natural Resources, Chengdu 610100, China)
Abstract: According to the different characteristics of indoor and outdoor modeling and the demand for indoor and outdoor integrated modeling, and comprehensive consideration of the factors such as modeling efficiency, accuracy, and cost, this paper explores large scene 3D modeling technology based on UAV oblique photogrammetry and regional indoor modeling technology based on design drawings, and realizes the rapid construction of high-precision outdoor 3D models without image control points. And based on SketchUp, it constructs the indoor 3D model with dynamic interactive effects, and completes the process of indoor and outdoor 3D modeling technology, which can provide technical reference for 3D model construction and related application.
Keywords: 3D modeling; oblique photogrammetry; dynamic interaction; indoor and outdoor integration
0 引 言
随着数字城市、智慧城市的快速发展,传统二维地图已不能满足人们的需求。三维数据数据量丰富、表现直观,得到城市规划、建筑设计、工业测量、文物考古、灾害监测等社会各行的重视和认可[1,2]。实景三维作为真实、立体、时序化反映人类生产、生活和生态空间的时空信息,是数字政府、数字经济重要的战略性数据资源和生产要素,是推动数字中国建设不可或缺的重要数据基础。自然资源部高度重视实景三维建设,印发了《实景三维中国建设技术大纲(2021版)》《实景三维中国建设总体实施方案(2022—2025年)》等文件全面推进实景三维中国建设。目前全国各省市实景三维建设也正如火如荼地开展,且随着经济社会的快速发展,社会对基于场景三维模型的地理信息服务需求越来越多,要求也越来越高。而人类主要生活在室内和室外地理空间中,生活生产离不开与室内外地理空间模型的交互[3],因此,单一室外三维模型已不能满足城市建设、管理的要求,三维建模正逐渐从室外走向室内及室内外一体化。如何进行室内外一体化三维建模,已成为数字城市建设关注的新方向[4]。但目前三维建模多集中于室外三维模型数据获取与处理、三维模型数据组织与管理及三维可视化方面,而针对室内三维建模尚处于探索室内空间数据获取方法以重建三维可視化模型阶段[5]。且由于室内外空间结构特征不同,室内外定位定姿技术存在较大差异,导致室内外三维数据获取方式不同[3]。针对以上背景及需求,结合室内外建模的不同特点,在试验区域采用大疆M300无人机获取了室外影像数据,构建了高精度室外三维模型,并基于建筑设计图构建了具备动态交互效果的室内三维模型,以期为三维模型建设及其在城市规划及建设管理、不动产管理、应急安全、文物保护、智慧城市建设等领域的应用提供借鉴。
1 理论基础
当前主流的三维建模技术有无人机倾斜摄影测量技术、三维激光扫描技术、SLAM技术等。
1.1 倾斜摄影测量技术
近年来,基于无人机搭载多视镜头进行倾斜摄影测量已成为获取大场景三维信息的主流手段。倾斜摄影测量通过搭载多个摄影相机及传感器,同时获得所摄对象垂直和倾斜等多个角度影像数据,经过三维重建后生成与真实场景高度还原的实景三维模型[6]。其克服了传统航摄技术只能从单一角度拍摄的局限性,通过对地物进行多角度拍摄,可获取同一地物的多幅倾斜影像。相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实地反映地物的实际情况[7]。通过倾斜摄影测量技术可快速构建高精度逼真的三维模型,具有数据获取成本低、周期短,建模自动化效率高、精度高、效果好等优势,在室外大场景建模方面应用广泛。
1.2 三维激光扫描技术
三维激光扫描技术是一种高效率、高精度、非接触式的主动测量技术[8,9],其通过高速发射激光即可快速获取建筑物体的三维点云数据,进而快速建立建筑物体的三维模型。与传统技术相比,基于三维激光扫描技术构建的三维模型由于获取了能够反映物体三维几何信息的大量密集点云数据,因此精度更高、细节更逼真。三维激光扫描技术也因其数据获取速度快、实时性强、精度高、非接触等优点已成为三维数据信息获取的主流手段[3]。
1.3 SLAM技术
即时定位与地图构建技术(Simultaneous Localization and Mapping, SLAM)结合激光扫描技术与移动测量技术的优势,通过运动估计和地图匹配来解决未知环境中的定位与测图问题,在移动过程中根据定位结果建立增量地图,又根据已有地图辅助进一步定位[3],实现在没有GPS的环境下,仅依靠技术设备自身的SLAM算法,即可实现室内三维激光点云数据的采集[7]。SLAM技术无须GPS及惯导系统,无须换站及拼接,即可采集获取物体完整的、连贯的点云数据,具有数据获取速度快、精度高、操作简单、数据处理方便等优点[10]。
2 总体技术路线
倾斜摄影测量因数据获取效率高、成本低,能获取真实的三维建模效果,是室外大场景三维建模的首选。对于室内三维建模,由于室内环境大多被分割成单独的区域,各区域间的连通性非常小,且单个区域内也充满不确定的家具摆放,其整体场景布局十分复杂,场景之间关联性低,通视效果差[3],增加了建筑物室内建模的难度。倾斜摄影测量由于受到拍摄视角和环境的影响通常适用于室外或拍摄视角良好的场景,在场景布局较为复杂的室内环境中很难获取重建建筑物内部结构信息,不适合用于室内三维建模。
三维激光扫描可以用于室内室外的环境[11],但在大场景三维建模及室内建模方面需频繁换站和拼接,存在工作效率低、误差不易控制等不足,一般仅用于局部区域三维点云信息获取。SLAM技术无须依赖GPS及惯导系统就可进行定位,也无须频繁换站及拼接,数据获取及处理简单,加之其优良的精度和稳定性,使其在室内、地下等空间内获取点云实现三维建模取得了突破性的进展,成为室内测绘和建模的最佳方法[3],但其成本较高。相较而言,基于建筑物设计施工图,使用3Ds Max、SketchUp等三维建模软件重建三维模型的方法可通过建筑设计图获得建筑物内部结构详尽的细节信息,因此可以构建较为精细的室内三维模型。
经综合考虑,本文采用无人机倾斜摄影测量技术构建试验区室外三维场景模型,并基于建筑物二维设计施工图,使用SketchUp三维建模软件构建室内三维模型,总体技术路线如图1所示。
图1 总体技术路线
3 基于倾斜摄影测量的室外三维模型构建
基于倾斜摄影测量的室外三维模型构建包含无人机倾斜摄影数据获取、空中三角测量、密集点云生成、TIN网构建、纹理映射、模型修饰等流程。
3.1 无人机航空摄影测量数据获取
在进行无人机航空摄影测量前,一般需利用已有的资料对试验区进行地形分析和实地踏勘,选定无人机起飞降落场地,设计航摄参数和航线布设方法。
本次试验区域为单位及周边街道,测区面积0.678 446平方千米,采用大疆M300无人机,搭载RAINPOO DG4M五镜头相机进行航摄作业。设计航摄分辨率0.035 m,航向重叠度80%、旁向重叠度65%,整个区域分12条航带进行作业。由于航摄视角的影响,为解决倾斜摄影测量低楼层区域存在变形、拉花、不清晰等问题,本次额外对试验区重点办公楼进行了特定视角的低空绕飞、手持拍摄,共拍摄2 660张倾斜影像,每张相片都自带高精度定位信息。由于航片获取期间均为晴天,为尽量减小航片中阴影面积,航摄时间均选在正午,且所有影像均为同一天获取,因此无须对影像进行匀色、锐化等预处理,只需剔除起飞和降落阶段的废片即可。
3.2 空中三角测量
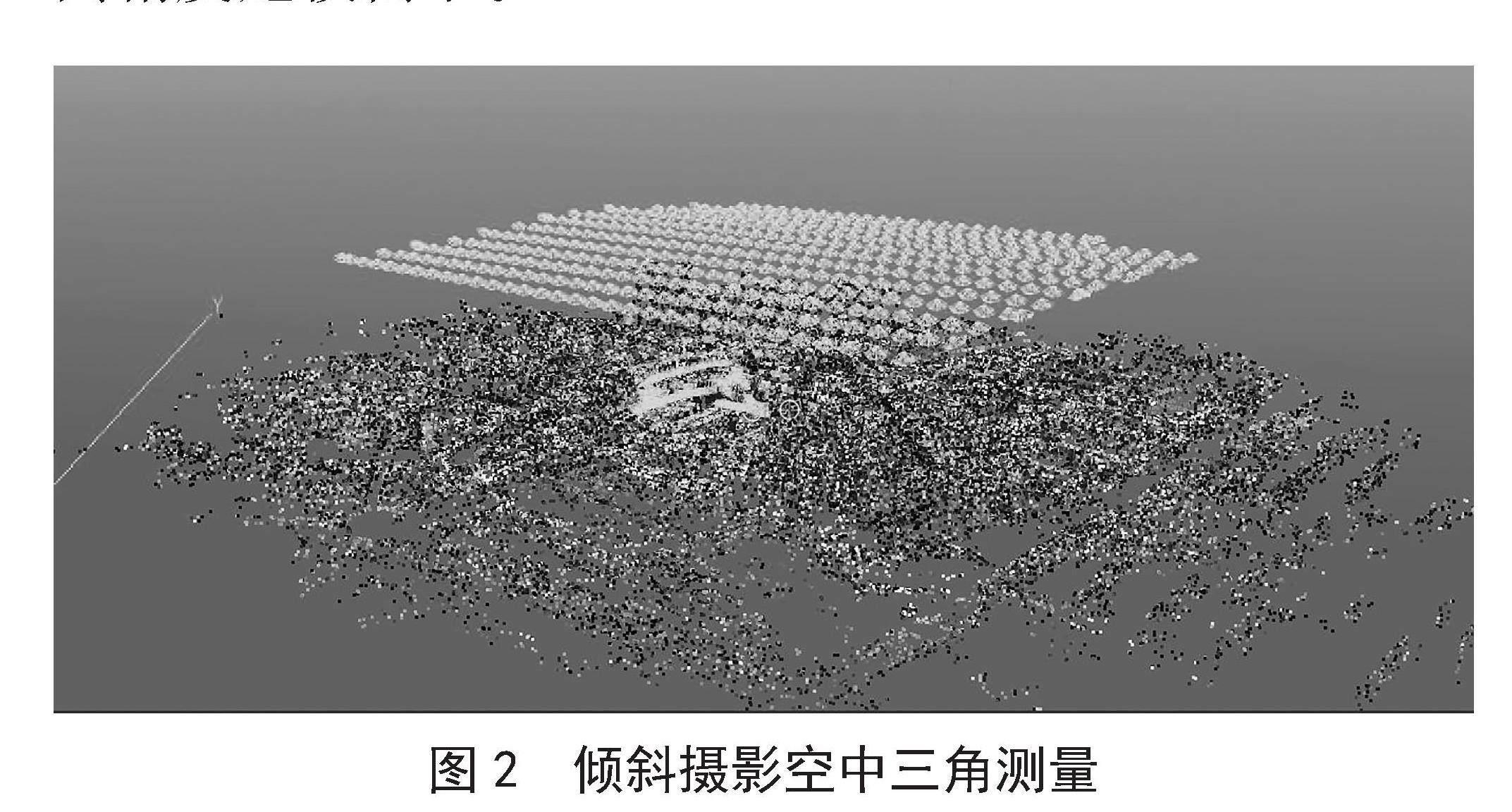
采用大势智慧三维建模软件——重建大师进行空中三角测量,将倾斜摄影获取的(前、后、左、右、下)5个视角的相片、低空绕飞及手持拍摄的相片、POS数据及相机属性信息导入软件中,经全自动的影像特征点提取后进行构网平差,开展空中三角测量,结果如图2所示。本次作业采用的大疆M300无人机配备高精度GNSS(GPS+GLONASS+BeiDou+Galileo)板卡,可支持高精度POS辅助空三。因此,本项目实现了免像控空中三角测量,生成的空三成果连接点重投影误差0.865 px,满足空三测量成果精度要求和高精度建模需求。
圖2 倾斜摄影空中三角测量
3.3 三维模型构建与修饰
根据空中三角测量得到的影像精确外方位元素和连接点空间位置等空三加密成果,采用重建大师,通过多视影像联合平差、多视影像密集匹配技术,自动生成点云数据,构建不规则三角网模型(TIN),并自动完成纹理映射和贴图。由于自动生成的三维模型存在悬浮碎片(细长型物体,如电线杆、电线等)、路面不平、拉花、纹理缺失和漏洞(尤其水面这种特征点少的地方)等情况,采用三维模型修饰软件——ModelFun对局部三维模型进行碎片删除、置平、补漏等修饰,确保三维模型成果满足要求,经修饰后的三维模型如图3所示。
图3 倾斜摄影室外三维实景模型
4 基于设计图的室内三维模型构建
4.1 数据准备
本项目室内建模部分以某栋办公楼为试验区,通过收集试验区办公楼二维施工设计图,根据试验区办公室外形结构(较为规则),选择使用SketchUp三维建模软件构建试验区办公楼室内三维模型。SketchUp是一款直观、灵活、易于使用的三维设计软件,具有操作简易、兼容性较好等特点,广泛应用于城市规划设计、建筑设计、园林景观设计、室内设计等领域。
根据收集的施工设计图,获取建筑物内部布局及结构尺寸信息。门、窗、办公家具、绿植等组件,以及所需的材质等都可从3D Warehouse里直接下载,为后续三维模型建设做好准备。
4.2 确定原点和坐标系
SketchUp也使用坐标系来辅助绘图。原点是结合实际定义整个项目坐标系统相对原点,一般与设计图坐标相对应,以确定项目方位。坐标系的设置遵循便于精确绘图的原则,可以直接点击轴工具,如图4所示。设置坐标系(确定绘图方向),绿色的坐标轴代表“X轴”,红色的坐标轴代表“Y轴”,蓝色的坐标轴代表“Z轴”,其中实线轴为坐标轴正方向,虚线轴为坐标轴负方向。先确定X、Y轴及方向,一般XY轴所在平面与建筑物平面设计图保持一致或平行,Z轴(正北方向)根据X、Y轴自动确定。
图4 轴工具
4.3 分层构建室内三维模型框架
将建筑物平面设计图导入SketchUp中,根据设计底图,使用SketchUp推拉工具快速构建墙体结构,搭建建筑物分层三维模型框架。
4.4 參数化组件构建
SketchUp可通过系统组件库插入组件、外部载入组件、自建组件等方式载入模型组件。SketchUp系统组件库中自带有一些门、窗等组件,也可从3D Warehouse或其他网站下载需要的组件,但是组件的样式不一定符合我们的要求。为使这些组件与实际样式保持一致或尽量接近,我们可以自己通过参数化构建或者原有组件基础上进行编辑更改,制作出满足我们需求的组件。SketchUp具有动态组件功能,动态组件是具有允许更高级功能的特殊属性的组件,它本质上是由参数控制的组件。通过设置组件属性,控制组件的大小(长、宽、高)、位置(X、Y、Z)、复制次数、旋转角度等,进而增加动态交互效果,例如开/关门、开/关窗、开/关抽屉等。本项目试验区门窗组件也是通过参数化构建的三维动态组件模型,一方面可通过修改组件参数重复利用参数化组件,避免同一类型相似组件重复建模。另一方面,同一组件之间存在关联性,当需要修改该类组件的参数时,只需修改任何一个相关联的组件,其他所有组件也会对应修改。
SketchUp可以制作动态组件,并具备与动态组件互动功能,进而产生更丰富的建模效果。以下以本项目中涉及的动态组件门和窗为例介绍动态组件的制作方法。
4.4.1 动态组件门的制作
制作动态组件门,需先制作一个门板组件,选中制作好的门板组件,打开动态组件工具,点击组件属性,添加属性信息,包含组件信息、位置、尺寸、旋转、行为等。其中位置属性定义了组件相对于坐标原点的距离,尺寸属性用于设定组件沿X、Y、Z三个方向的尺寸大小,行为属性用于设置组件的交互行为,包括材质、缩放、隐藏、点击、复制等行为,其中onClick(点击)是制作动态组件必须要设置的行为属性。onClick函数(交互函数)用于与动态组件产生互动,在鼠标点击组件后,会变化数值或产生动作。onClick函数中经常使用的是animate函数,即点击鼠标时引发动作的函数,一般表达形式为animate(a, s1, s2, …, sN),表示在0.5 s内将名为“a”的参数值循环遍历为s1,s2,…,sN的值。
本例中门的开关主要涉及门组件的旋转,因此,animate函数内添加旋转的参数设置,旋转范围从0°~90°,因此onClick=animate("RotZ",0,90),即沿着Z(蓝)轴逆时针旋转90°,创建好的动态门组件如图5所示。
图5 动态组件——门
4.4.2 动态组件平推窗的制作
制作动态组件平推窗,需达到点击玻璃窗执行平移的效果,因此,animate函数内添加平移的参数设置,平移值为组件相对坐标原点在某个轴上移动的距离,函数onClick=animate("X",0,lenx),即沿着X(红)轴移动lenx的距离,lenx为组件在X方向上的长度,由于一个完整的窗户由两个可以移动的玻璃窗组成,其可以移动的最大距离为lenx。当移动距离为0时,窗户全部关闭,当移动距离为lenx时,半边窗户全部打开。当然,也可以在animate中增加可移动的中间距离值,如animate=("X",0,40,lenx),如图6所示,为其中半扇窗户移动距离为40 cm时的状态。
图6 动态组件平推窗开40 cm效果图
4.5 组件放置
组件收集制作好后,根据设计图确定的位置,将门、窗等组件准确地放置在合适位置中。组件可根据需要动态调整大小,每一类组建可设置不同的属性标记,方便根据属性标记实现对组建的分类管理。
4.6 材质贴图
SketchUp软件自带有丰富的材质库,可根据需要直接使用质库里的材质,也可通过拍照自制材质,这样与实际可最大程度保持一致,方法较为简单,这里就不再细述。分层构建的室内三维模型框架将门、窗等组件放置完成后,再进行墙面、地板等材质贴图,并进行整体检查修饰,至此整个建筑物室内三维模型已基本构建完成,如图7和图8所示。
图7 室内分层展示效果图
图8 室内整体展示效果图
5 结 论
本文针对建筑物室内、室外的不同空间结构特征,综合考虑效率、精度、成本等因素,设计开展了基于无人机倾斜摄影测量的大场景室外三维建模技术和基于设计图的区域室内建模技术探索。在试验区域采用大疆M300无人机获取了室外影像数据,并针对试验区重点办公楼进行了特定视角的低空绕飞、手持拍摄,解决了倾斜摄影测量低楼层区域存在变形、拉花、不清晰等问题,实现了无须像控点的高精度室外三维模型快速构建,室内建模方面基于SketchUp构建了具备动态交互效果的精细室内三维模型,打通了室内外三维建模技术流程,一定程度上提升了用户体验。但目前构建的三维模型在语义信息、场景渲染、动态交互、三维可视化等方面还存在诸多不足,三维软件平台支持的数据格式不一、兼容性不友好,三维成果应用与其他行业融合不够深入。建议融合应用建筑设计、虚拟现实、3D游戏等技术优势,增强三维模型的动态交互感与沉浸式体验感,促进三维模型在数字孪生、元宇宙、智慧城市建设等更多领域的应用。
参考文献:
[1] 周杰.倾斜摄影测量在实景三维建模中的关键技术研究 [D].昆明:昆明理工大学,2017.
[2] 卞敏.空地一体精细化三维模型构建方法 [D].徐州:中国矿业大学,2020.
[3] 赵鹏程.室内外场景三维建模与语义分割关键技术研究 [D].武汉:武汉大学,2020.
[4] 韩伟,杨佳,周长军.基于地图建模的室内外无缝导航定位系统的设计 [J].电子设计工程,2015,23(8):165-167+170.
[5] 王嘉竞.基于BIM的城市地下综合管廊三维GIS建模方法研究 [D].南京:南京师范大学,2017.
[6] 陈远芳.基于倾斜摄影测量与BIM技术的室内外一体化三维场景建模及可视化 [D].抚州:东华理工大学,2022.
[7] 张小宏,赵生良,陈丰田.基于SLAM和倾斜摄影测量的工业园区室内外一体化三维实景建模与技术应用研究 [J].智能城市,2018,4(5):54-55.
[8] 徐华键,向煜,黄志,等.测绘新技术在城市新基建模型构建中的融合应用 [J].测绘通报,2021(5):132-136+166.
[9] 索俊锋,刘勇,蒋志勇,等.基于三维激光扫描点云数据的古建筑建模 [J].测绘科学,2017,42(3):179-185.
[10] 叶珉吕.基于SLAM-TLS的大型异构建筑室内外一体化三维建模 [J].城市勘测,2020(6):97-99+103.
[11] 黄鹤,佟国峰,夏亮,等.SLAM技术及其在测绘领域中的应用 [J].测绘通报,2018(3):18-24.
作者简介:柯元英(1988—),女,汉族,湖北黄石人,测绘工程师,注册测绘师,硕士研究生,研究方向:测绘科技创新与管理等;通讯作者:沈洋(1989—),男,土家族,湖北宜昌人,测绘工程师,硕士研究生,研究方向:摄影测量与遥感内外业生产技术管理、地理信息系统软件开发等。
猜你喜欢
科技资讯(2017年26期)2017-11-08 19:05:17
科技创新导报(2017年23期)2017-10-25 09:00:41
科技创新导报(2017年19期)2017-09-13 06:38:42
科技资讯(2017年18期)2017-07-19 17:56:16
科学与财富(2016年36期)2017-07-09 15:48:49
价值工程(2017年8期)2017-03-25 10:33:26
中小企业管理与科技·上旬刊(2016年12期)2017-01-05 00:09:51
科学与财富(2016年15期)2016-11-24 13:20:11
中小企业管理与科技·下旬刊(2016年11期)2016-11-18 08:18:07
电脑知识与技术(2016年24期)2016-11-14 00:38:44