基于4D毫米波雷达点云的多目标跟踪算法
2024-05-27 13:58:13张远肖宝华杨大林
科技资讯 2024年1期
张远 肖宝华 杨大林
关键词: 4D 毫米波雷达 聚类 卡尔曼滤波 数据关联 多目标跟踪
中图分类号: TN957.51 文献标识码: A 文章编号: 1672-3791(2024)01-0038-05
近年来,随着科学技术的飞速发展,以雷达传感技术为基础的目标识别与跟踪成为了研究人员的关注热点,如船用导航[1]、智能驾驶[2]以及智能家居[3]等领域。其中,在智能家居领域中,智能空调的研究也越来越成为人们研究的热点。目前市场上的智能空调根据传感器的不同主要分为两种:一种是基于红外传感器的智能空调,一种是基于摄像头的智能空调。这两种智能空调都是根据传感器跟踪室内人员的位置,智能调节出风口,避免冷风直吹人体。尽管基于摄像头的方法可以在许多任务中实现高分辨率和高精度,如姿态检测和人体识别,但可能会侵犯隐私。此外,基于相机的方法不适合在光线不好、有雾或有烟的情况下使用。而红外感知虽然没有泄露隐私的问题,但由于是基于热释电原理,只可以检测室内人员的有无,无法精确获取人体距离和方位信息,所以智能化程度不够高。激光雷达虽然可以解决上述问题,但成本较高。而4D毫米波雷达通过检测人的呼吸心率[4],判断人是否进入睡眠状态而调节温度。此外,该传感器可以不受光线、肤色、温度、烟雾等环境的干扰,具备测距、测角、测速的功能特性,使空调对环境感知能力进一步增强。基于此,本文采用4D 毫米波雷达作为智能空调的传感器设备。
YANG Z 等人[5]利用毫米波信号,通过分析信号的RSS(接收信号强度)来检测人的心率和呼吸模式。LIEN J 等人[6]近距离使用毫米波雷达进行手势识别。尽管毫米波雷达在人类活动识别中越来越受欢迎,但是基于4D 毫米波雷达的跟踪仍然是一个新领域,只有少数研究人员研究了与其他传感器融合的目标跟踪,如HUANG W 等人[7]融合了毫米波雷达和摄像机用于跟踪移动物体。针对这个问题,笔者提出了一种使用4D 毫米波雷达的实时人体检测和跟踪算法,分析了聚类算法、数据关联算法以及卡尔曼滤波算法,解决了单雷达条件下如何高精度跟踪的问题。
1 聚类算法
聚类是将没有分类的数据集分成若干簇的过程。4D 毫米波雷达在采集数据的时候可以返回大量的散射点[8],如果在目标跟踪的过程中对所有的散射点都进行跟踪,不仅计算复杂跟踪效率低,还会增加处理单元的负担。因此,对每个目标的点云聚类并为其分配一个单独的跟踪就显得尤为重要。
目前点云聚类方法主要有层次法、基于网格的方法划分法以及基于密度的方法[9]。结合4D 毫米波雷达特性分析,以基于层次聚类(Agglomerative Nesting,AGNES)算法为代表的层次法[10],虽然簇间距离容易定义但是缺点是计算比较复杂;基于网格的聚类方法,聚类速度快而且处理效果好,但是只适合点云特别稠密的情况;以 K-means 算法为代表的划分法相对于其他几种方法可以简单快速地处理4D 毫米波雷达点云数据,但是需要提前确定聚类的种类,当跟踪目标数量发生变化时,容易导致跟踪出错。而以DBSCAN 为代表的基于密度的聚类方法不仅可以克服K-means 的缺点,而且能发现任意形状的点云,其工作原理是通過将所有距离较近的点云划为各个不同的类别,从而达到聚类的目的。
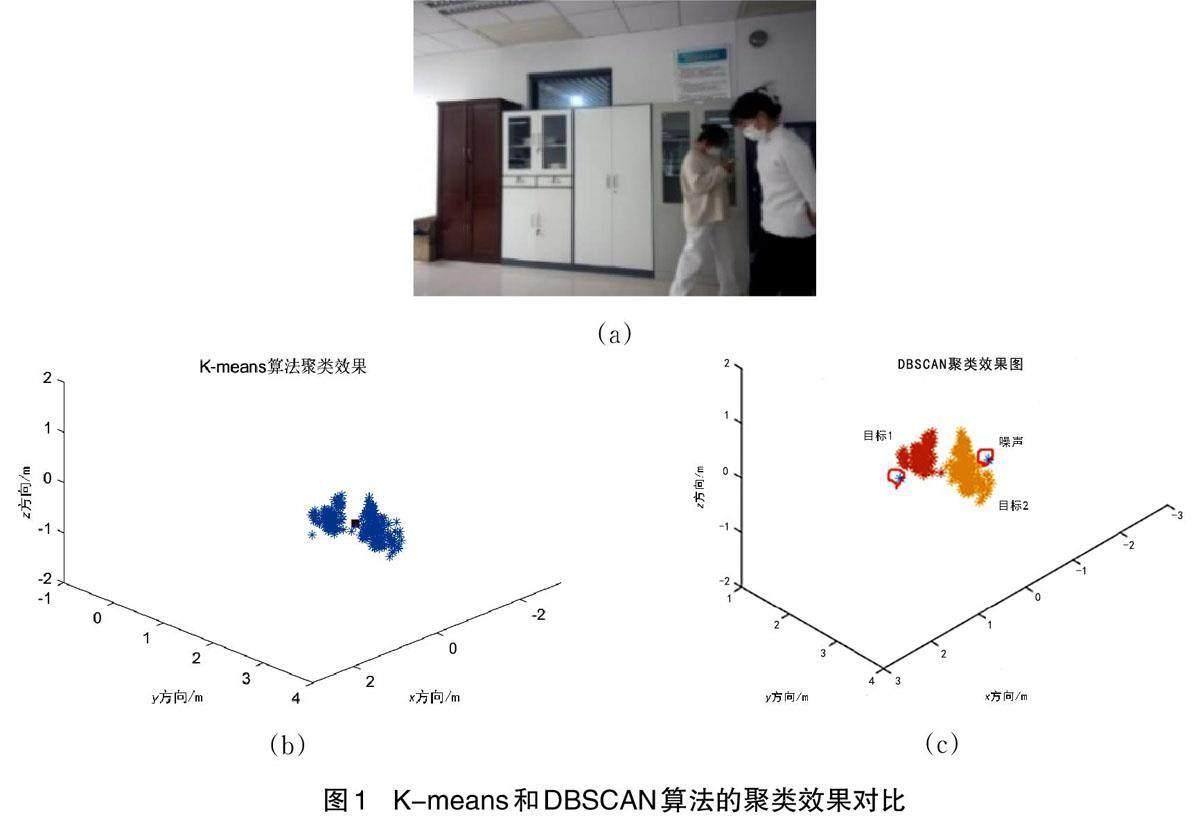
图1 是K-means 和DBSCAN 算法的聚类效果对比。图1(a)为单人跟踪的时候突然又闯入一个人的实际场景;图1(b)为此时K-means 聚类效果,黑色的方块表示目标的聚类中心,当出现两个目标时,聚类中心并没有随着目标数目的变化而变成两个,可以看出该算法只适合K 值固定的情况,对于目标数目变化的情况则会出现聚类错误;图1(c)为同一帧的点云数据,使用DBSCAN 方法聚类的效果。这里用不同的颜色表示噪声和不同的目标,其中画圈的是噪声,由此可以看出,DBSCAN 可以更好地适应多目标跟踪的情况。
2 数据关联算法
数据关联的目的是确定前后两帧是否为同一个目标,在点云跟踪中表示针对4D 毫米波雷达采集的前后两帧点云之间的关系,判断其是否为同一目标的过程。目前针对点云的关联算法主要有最邻近数据关联算法(Nearest-Neighbor Data Association,NNDA)、概率数据关联算法(Probabilistic Data Association,PDA)以及联合概率数据关联算法(JPDA)[11]。最邻近数据关联算法实现简单,但是只适合点云稀疏的环境。概率数据关联算法克服了最邻近数据关联算法的缺陷,但是只适合单目标跟踪的情况,而联合概率关联算法适合有杂波情况的多目标跟踪[12]。所以这里采用的是联合概率数据关联算法。
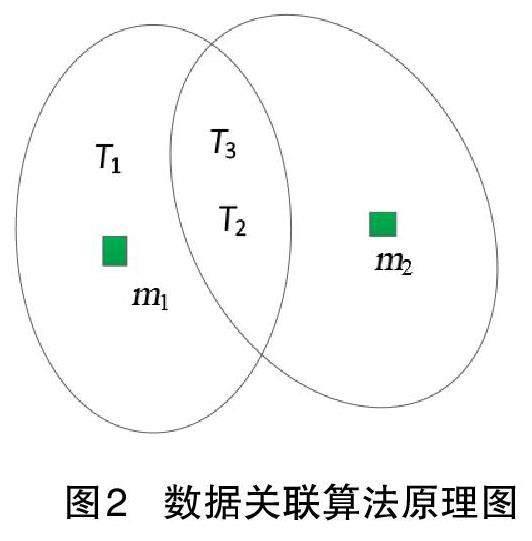
相比于单目标跟踪问题,多目标跟踪问题主要解决的是数据的匹配问题。如图2 中m1和m2 表示目标,椭圆形表示关联门限,T1、T2和T3表示不同目标的实测值。可以看出,数据有多种关联的可能,但是正确的关联只有一种。
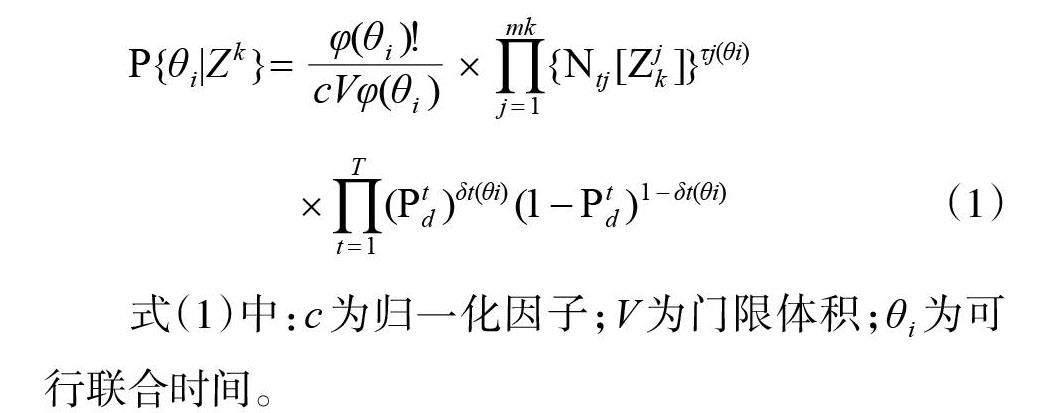
JPDA 算法利用落在跟踪门内的当前帧的点云,计算点云和已有轨迹的联合概率,当求出所有可行事件联合概率后,利用全概率公式计算所有可能情况的关联概率,根据关联概率求加权和将其作为状态估计值,其计算公式为
3.2 算法结构图
实验采用4D 毫米波雷达板子采集数据,图3 是实验采集示意图,通过毫米波雷达的测距功能,返回目标的三维位置信息,用于后续的跟踪使用。
本文算法结构图如图4 所示,首先将对获取的点云聚类判别出目标的数目,使用数据关联算法将目标与轨迹匹配,最后采用卡尔曼滤波优化目标的轨迹,实现多目标的跟踪。
4 实验结果
4.1 实验环境搭建
为验证算法的有效性,笔者选择77 GHz 四发四收的4D 毫米波雷达,最大可用频率为4 GHz 带宽。使用调频连续波(Frequency Modulated Continuous Wave,FMCW)技术,高带宽允许在大约4 cm 的高分辨率下检测目标。图5 是搭建的4D 毫米波雷达采集板。表1 是实验环境参数设置,如果一帧的点云的数量少于40,那么就会自动跳过该帧。
4.2 实验结果分析
图6(b)是人体毫米波点云跟踪效果图,图中短横线指向表示运动方向,画圈的则为噪声,可以看出图6(a)目标实际运动方向一致。图7 是根据行人每一帧所在位置形成的行人跟踪轨迹图,可以更直观地反映多目标轨迹跟踪情况。
为了更精确地显示跟踪效果,数据选取其中24帧,图8 是预测轨迹和真实轨迹的对比图,根据图可以看出,最初误差比较大,在后几帧里面误差比较小。表2 是采用该算法的跟踪误差结果表,由表中数据可以看出,误差的准确率可以达到91.8%,可以实现较好的跟踪效果。
5 结语
从实验结果可以看出,在一定距离范围内,本文算法可实现对多个行人目标的跟踪,可用于家居环境的使用,虽然在这本文中没有测量执行时间,因为主要目的是准确地掌握跟踪人数和精确的跟踪轨迹,但笔者认为有必要将高速处理作为现实应用的目标。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
当代陕西(2019年15期)2019-09-02 01:52:00
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
现代装饰(2018年5期)2018-05-26 09:09:39
学苑创造·A版(2018年11期)2018-02-01 06:29:20
中国三峡(2017年2期)2017-06-09 08:15:29
读者(2017年5期)2017-02-15 18:04:18
火控雷达技术(2016年3期)2016-02-06 02:30:26