基于BIM+GIS的室内外三维一体化系统设计与实现
2024-05-27 13:58:13廖菊燕
科技资讯 2024年1期
廖菊燕
关键词: 三维一体化 BIM GIS 仿真原型系统
中图分类号: TP274 文献标识码: A 文章编号: 1672-3791(2024)01-0018-04
由于数据源的限制,3D GIS 创建的3D 场景通常使用抽象的几何对象(如点、线、面、体等)来表示真实世界。通过强调外部和地面空间信息的表达,可以对外部和地面环境的功能和物理空间关系进行宏观空间分析。然而,由于建筑内部缺乏详细准确的空间数据,3D GIS 创建的3D 场景将保留在外部,难以模拟和表达室内和地下空间的空间环境[1]。
近年来,建筑信息建模(Building Information Modeling,BIM)技术发展迅速。在建筑设计和施工的各个阶段,利益相关方共同努力,完善项目信息,形成建筑项目通用的動态资源库,为BIM 项目提供一致的建筑与设施信息。BIM 模型已成为工程设计中精确设计和施工的重要数据源。三维模型中的空间数据是三维GIS 的重要数据源,具有信息的准确性和语义的丰富性。它也是构建高精度GIS 内部和地下环境的有效数据源。BIM 和GIS 的结合解决了3D GIS 中内部环境数据不足的问题,允许从宏观到微观、从外部到内部、从地面到地下的综合空间环境的一体化建模和表达[2]。
1 原型系统设计
1.1 需求分析
本文的目的是通过开发一个可视化场景的原型系统和相应的分析应用程序,探索BIM+GIS 中集成的内部和外部3D 场景的构建。
(1) 室内和室外场景的集成3D 可视化允许从用户角度进行交互式漫游,同时通过点击节点结构快速切换到场景。
(2) 场景中的空间单元与相关属性信息的实现有关。通过交互实现建筑的空间查询和相关信息查询,用户可以在场景中使用鼠标自由选择所需的目标,也可以通过选择节点自由组合它们。同时,还支持对相关信息进行实时编辑和修改[3]。
(3) 通过交互对场景进行实时建模和编辑。即通过选择场景位置的参考点(如中心、线、面等)并调整相应的参数,对相应的空间单元(如街道、管线等)进行参数建模。同时,还支持场景地形变化和实时倾斜摄影测量数据。
(4)相关的分析应用程序。通过将BIM 建筑模型与GIS 场景相结合,可以反映内外部场景之间相对准确的空间关系,并可以对相应空间中的视觉区域和缓冲区域进行空间分析,实现对内外部空间和时间集成等特定场景相关应用的支持。
本文开发了一个基于坐标定义、几何表达和语义映射的BIM+GIS 集成数据模型,并将BIM 模型的参数构建与多分辨率地形和倾斜摄影测量模型的方法相结合。通过使用BIM+GIS 建模设计和开发内外部系统,实现了集成三维建模场景的可视化,并在此基础上实现了相关分析应用。
1.2 系统框架
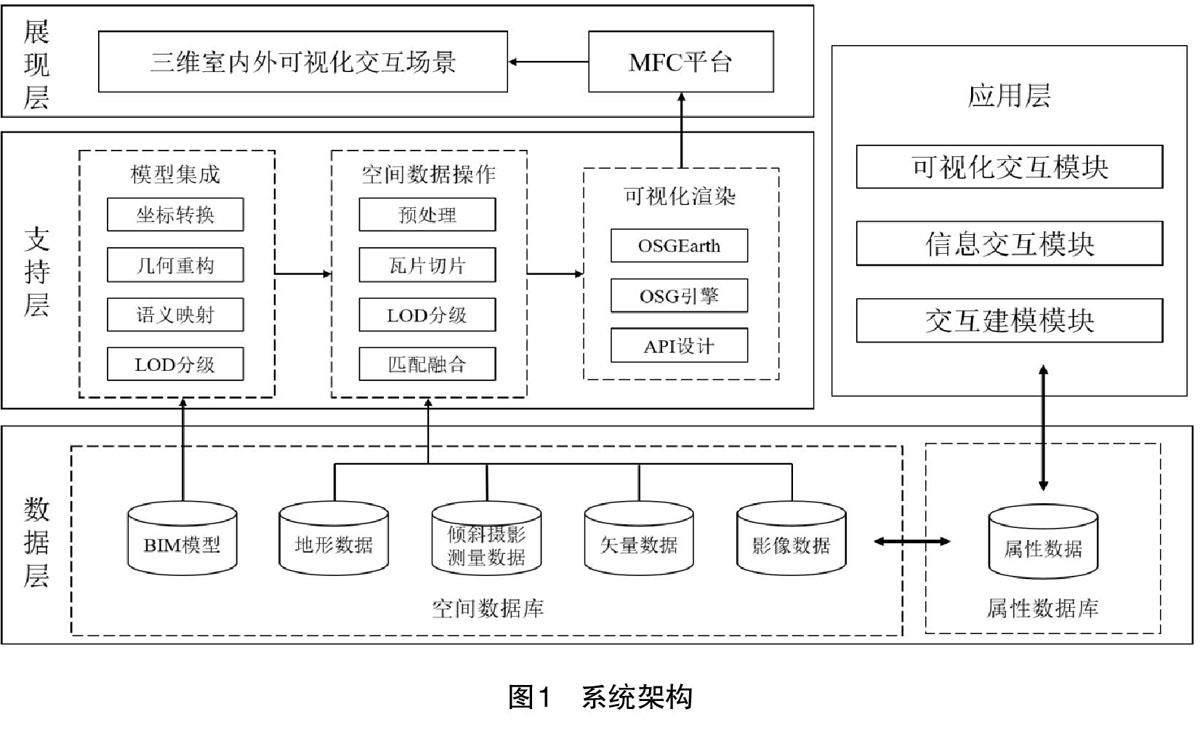
BIM+GIS 是一个基于OSG 渲染引擎和OSGEarthSDK 的三维可视化平台,基于C++语言二次开发。为了简化数据管理,提高三维场景渲染的效率,系统使用C/S 架构。数据通过服务器管理,客户端负责数据调用、计算和数据集成[4]。系统架构如图1 所示。
数据层包括空间数据库、地形数据、倾斜摄影测量数据、矢量数据、影像数据和用于管理相关属性的数据库,其中空间数据库包括BIM 模型。空间数据库和属性数据库实现空间数据和属性信息的完整映射。
支持层包括3 种关键集成技术:模型集成、空间数据操作和可视化渲染。首先,BIM 模型的集成为空间数据的集成与融合提供了数据基础;其次,构建地形、摄影测量、矢量和空间图像的多维空间金字塔,与集成BIM-GIS 数据模型进行融合与集成;最后,使用OS‐GEarth SDK 访问空间金字塔中的瓦片节点,可以使用OSG 引擎进行相应的API 设计和可视化实现。
应用层主要通过MFC 应用框架实现4 个系统应用模块,使可视觉化交互、信息交互、交互建模及应用分析成为可能。
系统各层独立,支持层间标准化接口,便于系统维护和扩展。
2 基于倾斜摄影测量的3D GIS 场景的制作
通过倾斜摄影测量技术,可以获取目标区域的图像,同时通过其他传感器获取与飞机位置相关的POS信息。
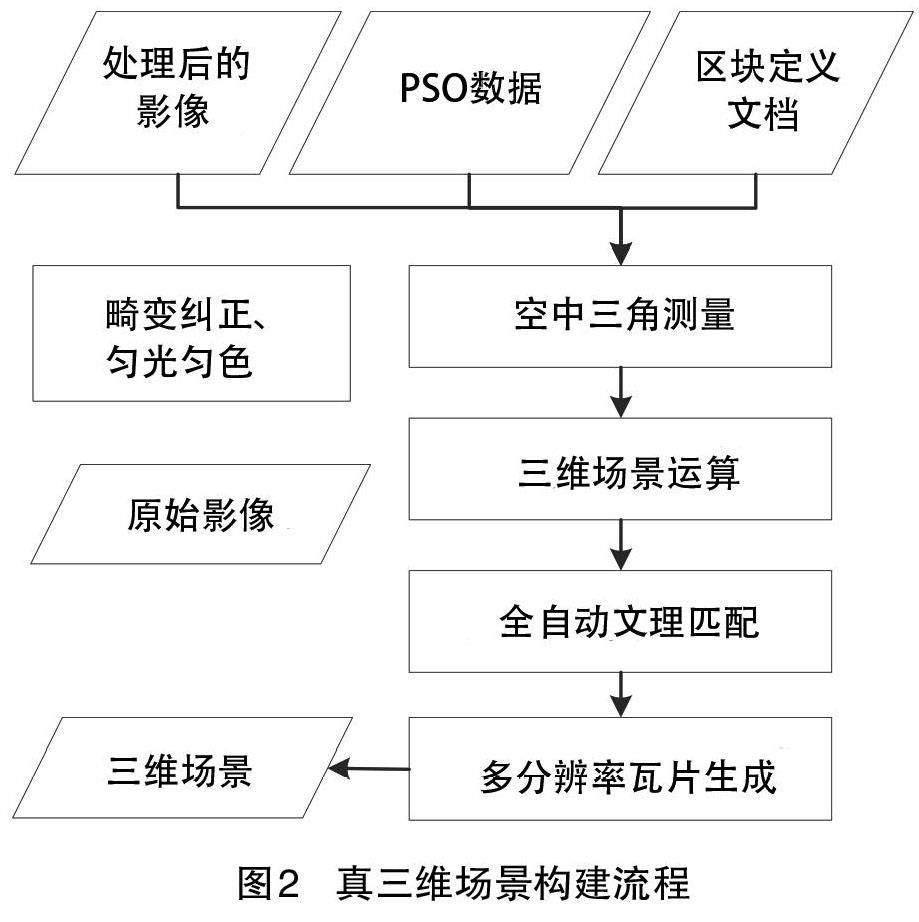
目前,Smart 3D 软件的主要应用是倾斜摄影测量数据的处理。Smart 3D 是一款可以从视频和照片中生成真实三维模型的软件[5]。整个场景的设计过程如图2 所示。
2.1 三维实景模型创建
三维实景模型的创建,主要包括空中三角测量、基于GPU 的三维场景运算、全自动纹理匹配。空中三角测量的基本思想就是根据影像重叠区域的像点坐标与真实像控点坐标以及影像与真实地形的关系来解算影像的外方位元素和加密点的坐标。目前,空中三角测量已经实现了流程的高度自动化,通过模式识别技术与多视影像匹配技术来进行传统作业中人为进行的选点与转点操作,对像点坐标实现自动获取,之后使用区域网平差程序进行解算,最终得出加密点在既定坐标系下的空间位置与影像的精确定向参数[6]。首先对POS 信息进行加密,通过区域网平差对粗差较大的点进行删除或修改,反复进行平差运算直到精度达到要求,最后得出每张图像的外方位元素。基于GPU 的三维场景运算主要是通过对空中三角测量的结果使用图像匹配方法,同时利用GPU 的并行加速对三维场景进行运算,从而得到基于真实影像的超高密度点云的数字表面模型(Digital Slope Model,DSM)。
逼真的3D 模型创建主要包括空中三角测量、基于GPU 的3D 场景操作和全自动纹理调整。空中三角测量即基于真实图像的图像点和控制点的坐标计算图像的外部方向元素和加密点坐标,并将图像连接到真实地形。利用多图像匹配技术代替以往工作中选点和转点手动操作,从而实现图像点坐标的自动检索。加密POS 信息,并删除或修改区域网平差中较大的区域差异,反复重复此步骤,直到精度达到所需水平,最后得出每幅影像的外部方向元素。基于GPU 的三维场景计算主要使用来自空中三角测量结果的图像匹配方法,利用GPU 并行加速计算三维场景,得到了基于真实图像的数字表面模型。
2.2 多分辨率瓦片生成
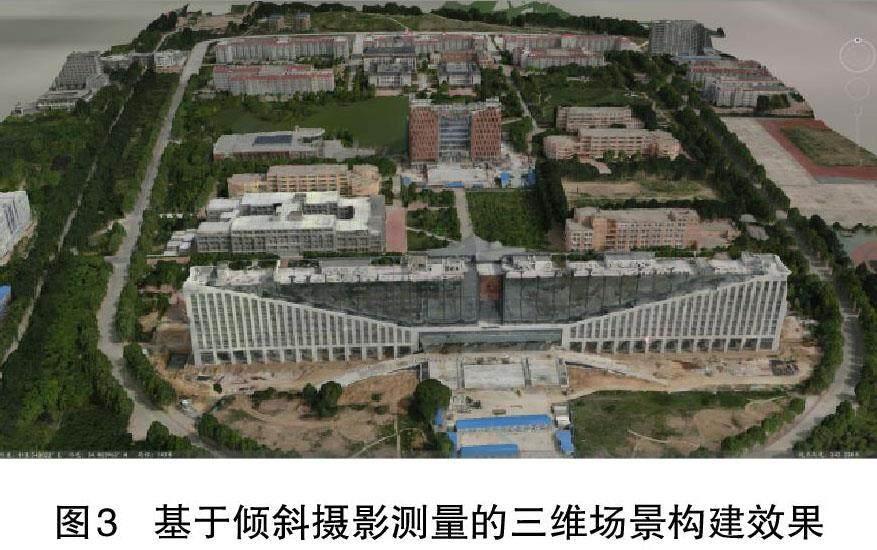
对于范围过大的三维重建模型,考虑到对计算机内存的较高要求,有必要对其创建一个多分辨率系统。目前,3D 瓦片分割技术得到了广泛应用。该模型分为多个瓦片,可以自由定义3D 场景的显示区域,这也有助于深入分析场景的空间过程。图3 显示了使用倾斜摄影测量构建3D 场景的最终效果。
在多个三维重建模型中,需要创建一个多分辨率系统来满足计算机内存的严格要求。目前,三维飞行控制技术已经得到了广泛应用。使用多个瓦片模型,可以自由控制三维场景区域并简化场景的空间分析。
3 BIM和GIS的融合路线
由于BIM 模型中的数据量很大,很难在3D 场景中直接显示。需要做LOD 多级处理,将空间几何图形和属性转换为高分辨率GIS 数据,以集成BIM 和GIS 数据处理。在处理BIM 数据转换后,还需要将3D 场景与GIS 相结合,并在3D 场景中进行显示。加载BIM 模型后,必须将其与从地形和侧面摄影测量中恢复的3D 模型数据合并。由于一些BIM 数据提供了参数数据,因此无法将其作为模型直接导入GIS 平台,还需要对参数进行建模以形成能够以3D 显示的3D 模型。本文提供了BIM 和GIS 之间的合并路径,如图4 所示。
4 原型系统实现
4.1 系统界面
原型系统的界面如图5 所示,其中,主窗口为三维场景的可视化窗口,其他菜单面板采用按键呼出与隐藏的方式,这样既能够保持界面的简洁,同时也能够使用户将注意力集中到三维场景上。
4.2 交互建模模块
交互建模模块主要允许用户在三维场景中进行相关要素建模,同时该模块还支持实时对三维场景的地形与倾斜摄影测量数据做出修改。系统支持对场景中地形数据的修改,通过用户对需要修改范围的框选,同时设置修改的参数而实现场景的编辑。图6 是对水库平面的整平处理的场景编辑图。
4.3 分析应用模块
分析应用模块主要包括基于三维场景的基本空间分析,以及针对特定场景的空间规划和输出。测量功能主要包括坐标定位、可视判断、距离、面积测量等。坐标定位是通过输入实际坐标的经度、纬度或空间坐标,快速定位场景并简化目标搜索的功能。
5 结语
随着城市的发展,人们在室内的时间越来越多。无论是日常生活还是反恐救险,室内都逐渐成为人类活动的主要场所。本文介绍了BIM+GIS 原型建模系统的室内外设计与应用。首先,须进行需求分析,主要配置包括数据层、支撑层、显示层、应用层的原型系统结构。其次,从视觉交互、信息交互、交互建模、分析和应用这4 个方面介绍系统的功能。最后,使用特定的案例推演復杂的内部和外部任务。