
架空输电线路无人机巡检中的自动补光系统应用研究
2024-05-23 01:02郑波
通信电源技术 2024年7期
郑 波
(国网山东省电力公司超高压公司,山东 济南 250000)
0 引 言
随着社会的持续进步与经济的快速发展,电力作为现代社会的核心驱动力,其需求量与日俱增。输电线路稳定运行对于保障电力供应的稳定连续至关重要。然而架空输电线路长期处于复杂的自然环境,常年遭遇冰冻、鸟害、雷击等影响,导致线路关键部位时常出现绝缘子自爆、防震锤脱落、线路断裂等故障。若不能及时发现并处理故障,可能导致跳闸事故,威胁辖区的电网安全,因此需开展线路巡检及时发现并处理故障[1]。受限于人的视觉和体力,传统人工巡检方式效率低下且难以覆盖所有的输电线路。随着数字技术的发展,新型巡检方式如直升机巡检、无人机巡检以及智能机器人巡检等应运而生,在架空输电线路巡检领域展现出显著优势[2]。其中,无人机巡检不仅可以大幅提高工作效率,还能捕捉传统巡检方法难以观察到的细节,如导线的微小裂纹、绝缘子的破损等。特别是在面对复杂多变的杆塔塔型和线路通道环境时,无人机巡检的灵活性和适应性尤为突出。但无人机巡检对风向、光照、温湿度等气象条件的要求较高,条件不达标时工作效能较低。例如,在晨昏或阴霾环境下,巡检现场光照亮度不足,无法满足安全飞行要求。此时即便执行飞行任务,但由于光线过暗,会导致图像采集不清晰,最终无法精准识别缺陷。
1 无人机可视化巡检
1.1 巡检内容
无人机可视化巡检主要依靠无人机搭载的可见光巡检设备,对架空输电线路外部可见的导线损伤、绝缘子污秽、金具锈蚀等缺陷或故障进行排查、识别。无人机还可以利用红外热成像技术,通过捕捉设备表面温度的异常变化来检测热故障,如架空输电线路过载、接触不良等。
1.2 巡检流程
无人机可视化巡检通常涵盖无人机巡检规划与准备、无人机巡检作业实施、数据处理与分析以及巡检结果反馈与应用4 个环节[3]。第一,无人机巡检规划与准备。电力公司运检部或线路运维部制定详细的巡检计划,并做好巡检准备工作,如巡检空域申报、设备设施领用检查等,确保无人机飞行状态良好、设备齐全且功能正常。第二,无人机巡检作业实施。无人机巡检时应当按照预定路线飞行,不可随意变更起降点和航路。飞行过程中,无人机搭载的高清摄像头和传感器设备全方位拍摄和检测输电线路,实时分析和判断线路的运行状态。第三,数据处理与分析。处理和分析收集的图像和数据,识别和定位输电线路的缺陷和隐患,并采取针对性的维修和整改措施,确保输电线路安全运行。第四,巡检结果反馈与应用。运维部门将发现的缺陷和隐患及时反馈给相关部门和人员,以便及时安排维修人员进行修复和处理,同时将巡检结果输入线路的运行管理数据库,为后续的线路维护和管理提供数据支持。
1.3 巡检安全条件
无人机巡检需要一定的环境条件,如天气条件、环境光线、航线与航点等。这些条件共同确保了无人机可视化巡检在架空输电线路巡检中的有效性和安全性[4]。在天气条件方面,无人机执行巡检任务需要天气晴、风级适宜,而在雷雨、降雪、大雾及寒潮大风等恶劣气象条件下不允许飞行。在环境光线方面,无人机执行巡检任务需要光线良好,尤其在开展精细化巡检任务时,尽可能避开暗光环境。在航线与航点方面,无人机应在规划航路中飞行,以确保无人机飞行姿态平稳、巡检数据准确、可靠。
2 环境光线过暗对无人机巡检的影响
2.1 降低巡检质效
无人机巡检在一定程度上能够替代传统巡检人员登塔作业,不仅降低了高空坠落风险,而且扩展了巡检范围。然而在晨昏时段、阴霾天气等暗光环境中,无人机图像信息采集质量下降,难以准确判断重要信息,如线路细节、设备状态、缺陷故障等,使得无人机精细化巡检缺陷识别率降低,甚至出现漏检和误判情况。以山东电力某500 kV 输电线路021 号至050 号区段冬季巡检任务为例,在天气晴朗、光线良好的时段(上午10:00—11:00,下午13:30—15:00),通过无人机巡检共检查发现缺陷85 处。但是,在同一天暗光环境下(薄雾上午08:00—09:30,傍晚16:00—18:00),同一巡检班组利用无人机巡检发现缺陷总计仅为37 处,缺陷具体种类数量如图1 所示。对比光线充足的时段,暗光环境下无人机巡检的缺陷发现率降低了56.47%,巡检质效严重降低。
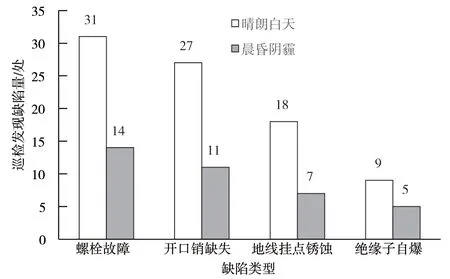
图1 无人机在晴朗白天与晨昏阴霾条件下巡检缺陷发现情况对比
2.2 降低巡检安全系数
无人机依靠视觉传感器进行导航和定位,光线不足会导致视觉传感器性能下降,增大导航和控制难度,降低无人机巡检在复杂环境下的安全系数,甚至会发生坠机、碰撞等事故。山东电力超高压公司某市公司2019 年以来无人机可视化巡检作业坠机分析报告统计显示,由于环境光线不佳导致操作无人机的巡检人员无法及时发现障碍物而造成的无人机坠机事故34 架次,占总坠机事故的42.3%,大大降低无人机巡检的安全系数。
3 无人机巡检补光系统设计
3.1 图腾柱开关电路工作原理
图腾柱开关控制电路,如图2 所示。它的主要构件为NPN 三极管Q2、PNP 三极管Q3以及补光灯模块。Q2与Q3以共基极的方式接入输入端,并以共发射极的方式连接至输出端。当输入信号为高电平时,Q2呈现导通状态,Q3呈现截断状态。在此状态下,补光灯获得电流供应,并通过电源进行供电。当输入低电平信号,Q2呈现截断状态,Q3转变为导通状态,补光灯通过Q3接地,实现电路的闭合[5]。

图2 图腾柱开关控制电路电路图
3.2 补光系统设计
设计的补光系统的电路见图3。在图腾柱开关电路基础上进行改进,增加自动补光功能,同时结构上增加外界光线亮度实时检测单元、高低电平逆转模块以及稳压模块。
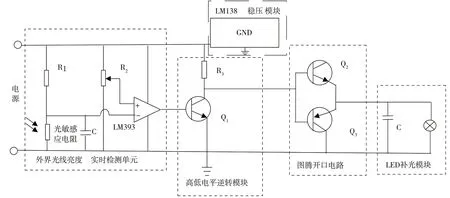
图3 无人机可视化巡检自动补光系统电路图
外界亮度实时检测单元的核心组件包括LM393宽压比较器和光敏感应电阻。在巡检过程中,无人机依据光敏电阻的阻值变化来评估外界光线强度的变动情况。当处于暗光环境时,若实际光线强度未达到预设的阈值,光敏电阻的阻值会相应增大,此时信号由U 转向U+,进而触发LM393 发出低电平补光信号。若巡检环境光线明亮,亮度超过预设阈值,光敏电阻的阻值会减小,导致U-小于U+,此时LM393 会传递高电平补光信号。
高、低电平逆转模块采用NPN 型三极管Q1构建信号逆转电路。该模块与LM393 宽压比较器的输出端相连。当基极接收到低电平补光信号时,输出端将其转换为高电平补光信号;若基极接收到高电平补光信号,输出端转换为低电平补光信号。
LM138 稳压模块中,LM138 三端稳压器的输入端与电源模块输出端电连接,输出端与开关控制模块电连接,用于给补光模块提供稳定补光电源。
LED 补光模块选择灯具时,需要结合工作环境、光照需求、补光范围等因素来挑选补光系统运行流程见图4。外界光线亮度实时检测单元感知外界亮度变化,把亮度信息转换成高、低电平补光信号,信号传输到高、低电平逆转模块进行电平信号的逆转输出。图腾柱开关控制电路在收到高电平补光信号后,导通LED 补光模块开启补光,收到低平补光信号后关闭LED 补光模块。

图4 补光系统运行流程
4 自动补光系统效果验证
为验证所提补光系统的效果,选取山东电力辖区某500 kV 输电线路021 号至050 号区段线路为实验对象,在2023 年11 月22 日3 个时段开展加装补光系统的无人机精细化巡检。3 个时段分别是清晨薄雾时段(07:00—09:00)、天气晴朗光线明亮时段(10:30—12:30)和傍晚光线较暗时段(16:00—19:00)。
巡检图像信息自动识别系统形成的巡检报告如下:天气晴朗光线明亮时段,共识别缺陷16 处(悬垂线夹锈蚀6 处、螺栓移位3 处、防震锤断股2 处、销钉脱出2 处及鸟巢3 处);在傍晚光线较暗时段,共识别缺陷14 处(悬垂线夹锈蚀5 处、螺栓移位3处、防震锤断股1 处、销钉脱出2 处及鸟巢3 处);在清晨薄雾时段共识别缺陷13处(悬垂线夹锈蚀5处、螺栓移位2 处、防震锤断股1 处、销钉脱出2 处及鸟巢3 处)。具体识别结果如图5 所示。对比3 个时段缺陷识别情况能够看出,在薄雾、傍晚等外界光线不充足环境中,搭载自动补光系统的无人机实施精细化巡检时,缺陷发现率均可达80%以上,能够较好地解决以往暗光环境中无人机巡检质效低、图像采集模糊、缺陷难以有效识别等问题。

图5 加装自动补光系统后不同光线条件下无人机巡检发现缺陷数量
5 结 论
架空输电线路的无人机巡检技术已经在电网系统中得到广泛应用,但仍受限于设备性能。在清晨、傍晚或薄雾天气等光线较暗的环境下,无人机难以高效执行巡检任务。为解决这一问题,提出自动补光系统,可有效提升巡检照片的质量,使缺陷和故障在暗光环境中能被较好地识别。本研究旨在提高无人机巡检的效率和准确性,推动无人机巡检技术在全天候、全时段的应用和发展。
猜你喜欢
大学物理实验(2023年5期)2023-10-27
数字技术与应用(2023年4期)2023-05-10
轨道交通装备与技术(2021年5期)2021-11-19
家教世界·创新阅读(2020年8期)2020-08-13
电子制作(2019年19期)2019-11-23
今日农业(2019年16期)2019-01-03
汽车维修技师(2018年7期)2018-12-07
中国交通信息化(2017年8期)2017-06-06
现代农业(2016年6期)2016-02-28
微处理机(2012年5期)2012-07-25
