扎穴施肥单体仿真分析与试验
2024-05-22 11:58:10古冬冬张征杨杰曹再辉景建群李国强
中国农机化学报 2024年2期
古冬冬 张征 杨杰 曹再辉 景建群 李国强

摘要:為改进高秆作物传统撒播、条播施肥方式肥料利用率低问题,设计一种高地隙穴施肥作业车,该作业车扎穴施肥单体两侧安装有探针传感器,可以根据作物植株位置进行精准穴施肥。基于RecurDynEDEM、EDEMANSYS对扎穴施肥机构进行多体动力学—离散元、离散元—有限元仿真分析,并进行扎穴排肥试验,仿真试验明确扎穴施肥单体的运动机理和土壤成穴情况,量化施肥量与排肥器开度之间的函数关系;在扎穴施肥过程中,鸭嘴总变形为0.005 mm,等效应力最大为4.142 2 MPa,远小于结构钢屈服强度,鸭嘴不会发生应力变形。扎穴排肥试验进一步确定施肥单体的实用性,修正施肥量与排肥器开度之间的函数关系,可以针对不同农作物调节排肥轮开度进行精准施肥。
关键词:高地隙穴施肥作业车;中耕管理;穴施肥;排肥轮
中图分类号:S224.4
文献标识码:A
文章编号:20955553 (2024) 02005507
收稿日期:2023年3月17日 修回日期:2023年5月30日
基金项目:河南省科技攻关项目(232102111131)
第一作者:古冬冬,男,1981年生,河南郑州人,博士,讲师;研究方向为现代农业装备信息化。Email: wintergdd@126.com
通讯作者:杨杰,男,1976年生,陕西汉中人,博士研究生,副教授;研究方向为现代农业机械设备。Email: yangjie@ncwu.edu.cn
Simulation analysis and test of piercing fertilization monomer
Gu Dongdong1, Zhang Zheng1, Yang Jie1, Cao Zaihui2, Jing Jianqun3, Li Guoqiang4
(1. School of Mechanical Engineering, North China University of Water Resources and Electric Power, Zhengzhou,
450046, China; 2. Zhengzhou Institute of Aeronautical Industry Management, Zhengzhou, 450005, China;
3. Xinxiang Huaxi Technology Co., Ltd., Xinxiang, 453800, China; 4. Institute of Agricultural Economics and
Information, Henan Academy of Agricultural Sciences, Zhengzhou, 450002, China)
Abstract:
In order to improve the problem of low fertilizer utilization rate of traditional sowing and strip sowing fertilization methods of tall crops, a hightech cavity fertilization operation vehicle was designed, and probe sensors were installed on both sides of the hole fertilization monomer of the operation vehicle, which could carry out accurate hole fertilization according to the position of crop plants. Based on RecurDynEDEM and EDEMANSYS, the multibody dynamicsdiscrete element, discrete elementfinite element simulation analysis of the pit fertilization mechanism was carried out, and the pit fertilization test was carried out, which clarified the movement mechanism of the pit fertilization monomer and the soil hole formation, and quantified the functional relationship between the amount of fertilizer application and the opening of the manure discharger, and the total deformation of the duckbill was 0.005 mm, and the maximum equivalent stress was 4.142 2 MPa, which was much smaller than the yield strength of structural steel, and the duckbill would not undergo stress deformation. The practicability of the fertilizer monomer was further determined, and the functional relationship between the amount of fertilizer applied and the opening of the fertilizer drainer was corrected, the opening of the manure discharge wheel could be adjusted for different crops for precise fertilization.
Keywords:
hightech cavity fertilization operation vehicle; cultivation management; hole fertilization; manure removal wheel
0 引言
我国四大平原为东北平原、华北平原(也称黄淮海平原)、长江中下游平原、关中平原,其中长江中下游平原、关中平原主要由于河流冲积形成[1]。我国多地严禁在河道管理范围内种植高秆作物以方便行洪,东北平原和黄淮海平原大多种植高秆作物,如小麦、玉米、高粱和芝麻等[2]。很多高秆作物除了需要施基肥外,大都在中耕时期需要二次或多次追施氮肥来给其提供足够的养分,进而提高产量[3]。
传统追肥方式大多为人工撒施或机器条施,尤其对玉米、高粱、烟草等单秆作物来说,极大地降低了肥料利用率,严重时会使土地富营养化,从而造成污染。所以针对单杆高秆作物,穴施肥不失为一种较好的施肥方式[4]。吴南等[5]基于摇杆机构设计了一种可以安装在免耕播种机上的穴施肥装置,可以实现玉米精量穴施肥农业技术要求。
本文基于前人研究基础上,设计一种基于高地隙作物施肥作业车的扎穴施肥单体,分别采用RecurDynEDEM耦合和EDEMANSYS单向耦合对该扎穴施肥单体进行仿真分析,得出排肥轮开度与施肥量间的函数关系,查看其工作性能,通过实际扎穴施肥试验对肥轮开度与施肥量间的函数关系进行修正。
1 高地隙中耕管理作业车与扎穴施肥单体结构
1.1 中耕管理作业车结构
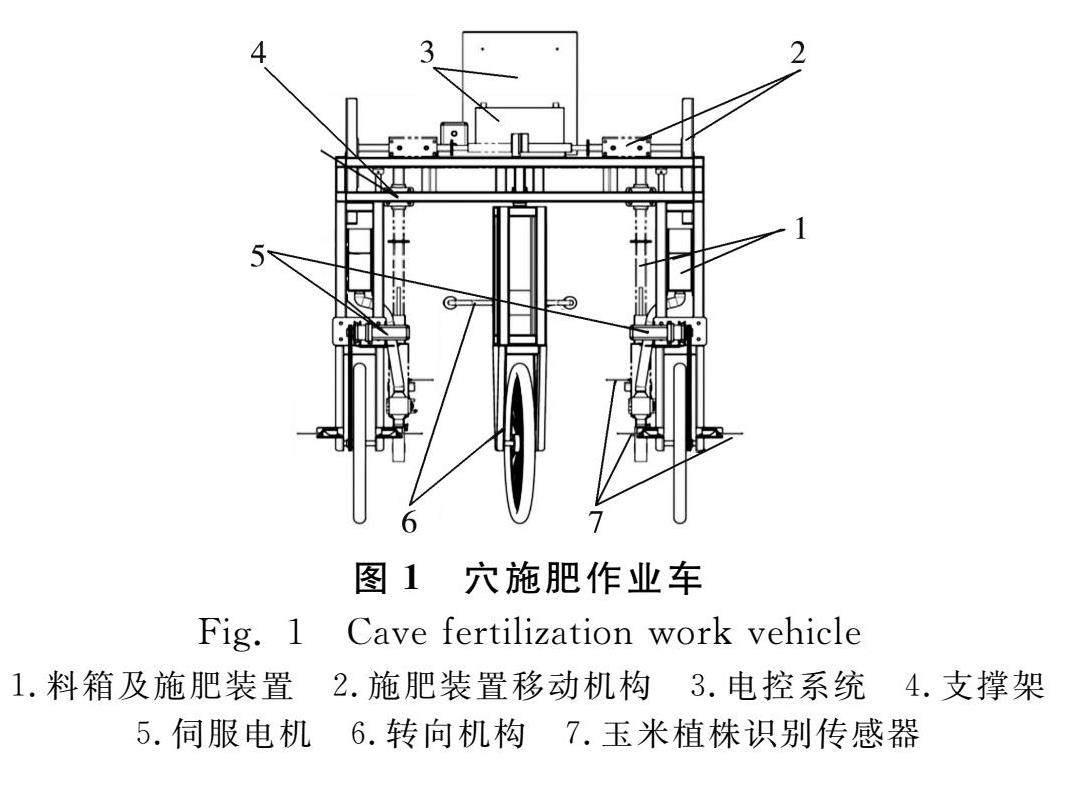
如图1所示,高地隙作物中耕管理作业车采用纯电驱动,主要包括车架、控制系统、磁铁驱动装置、车轮转向装置及扎穴施肥单体等。其中扎穴施肥单体与车架采用螺栓连接固定,通过电动推杆可以上下、左右调节其位置,施肥单体两侧和车架内侧安装有探针传感器,行驶过程中施肥单体内测探针触碰到作物植株即可导通磁铁电源进行扎穴施肥,施肥单体外侧和车架内侧探针用来调节施肥单体水平位置以适应不同行距。
1.2 扎穴施肥单体结构介绍及工作原理
如图2所示,扎穴施肥单体主要由固定竖排、运动竖排、动力装置、排肥装置和扎穴装置等组成。
1.固定竖排 2.弹簧卡 3.返程弹簧 4.电磁铁底座
5.运动竖排 6.肥盒 7.鸭嘴 8.鸭嘴开合器 9.弹簧
10.排肥轮 11.肥量调节器 12.销子 13.拨杆
其中排肥轮机构如图3所示,通过调节排肥轮和肥量调节器间开口距离控制落肥量的大小。
1.排肥轮 2.肥量调节器
扎穴施肥单体通过定竖排搭载至作业车,其中排肥轮上端有开口,扎穴前,排肥轮可接收从上方肥箱通过钢丝软管落下的肥料;进行扎穴时,电磁铁压缩返程弹簧使动竖排快速向下移动,动竖排上销子拨动拨杆进而使排肥轮转动,当运动至底部时,排肥轮开口位置向下,此时肥料从排肥轮开口处落下且鸭嘴扎入土壤;运动竖排返程时,鸭嘴触碰到鸭嘴开合器,迫使鸭嘴张开使肥料落入土壤,随着运动竖排继续提升,鸭嘴离开开合器受自身螺旋扭簧作用快速闭合,即完成一次扎穴施肥动作,各流程示意图如图4所示,其中红色圆点代表肥料颗粒。
2 扎穴施肥单体EDEMRecurDyn耦合仿真
RecurDyn是一款常用于求解运动情况和接触形式复杂多样的动力学问题的多体动力学仿真软件,其自身支持参数化建模,还可导入很多主流CAD软件建模文件,操作界面友好且求解结果较真实,广泛应用于航空航天、工程机械和汽车船舶等领域[6]。
EDEM是全球首个多用途离散元仿真分析软件,因其自身可實现运动形式较为简单,往往结合多体动力学软件进行含有复杂运动的模拟仿真,还可以与有限元仿真软件耦合,对施加在机器零件的载荷进行仿真分析,并将结果直接导出到所选的结构分析工具中,广泛用于农业、矿业、医疗器械等行业[7]。
2.1 扎穴施肥单体多体动力学建模
利用Creo装配扎穴施肥单体各零部件并将相对静止的零部件进行重组成为一个整体[8],如图5所示。为探究肥盒开口大小对施肥量的影响,开度设置为5~30 mm,每间隔5 mm为一个开度,分别将装配体另存为“.stp”格式依次导入RecurDyn中,分别对各零部件添加约束如表1所示。
在添加完所有约束后,在鸭嘴与运动竖排之间添加旋转扭簧,鸭嘴控制器与固定竖排之间添加拉伸弹簧,运动竖排中销子与排肥轮中拨杆之间添加接触,鸭嘴与运动竖排之间添加接触,给运动竖排与固定竖排之间移动副添加驱动函数,结合实际工况,驱动函数设置为285×step(time,0.5,0,0.7,0.25)+285×step(time,0.95,0,1.25,-0.25),最后将所有零部件添加为wall导出并在External SPI打开Connect耦合接口[9]。
2.2 离散元物料建模
该试验所用的肥料为生产活力壮尿素(粒度范围:直径为0.85~2.80 mm,GB/T 2440—2001,N含量≥46%)[10]。首先设置尿素颗粒和施肥单体模型的材料泊松比、密度和弹性模量,如表2所示。尿素颗粒设置为物理半径1.0 mm的单球形颗粒,粒径分布选择uesr defined,其中物理半径0.6 mm占20%,1.0 mm占40%,1.4 mm占20%,接触模型选择HertzMindlin (no slip)模型[11],各材料间接触参数如表3所示。
2.3 扎穴施肥单体离散元物料建模
在设置完尿素颗粒材料属性后,在肥盒上方位置建立一个Cylinder作为尿素的颗粒工厂,采用静态填充方式并设置瞬间填满[12],模拟肥箱内经钢丝软管落下的肥料,将RecurDyn导出的walls导入至EDEM中几何模型,如图6所示。
为方便后期统计落肥量,计算域在施肥单体原几何尺寸基础上向重力方向正方向延伸一段,具体位置以(-135 mm, -800 mm, 785 mm)位置为原点建立长方体,X、Y、Z方向长度分别为110 mm、450 mm、875 mm,重力方向为Y轴负方向,大小为9.81 m/s2。在完成前处理后,求解设置中瑞丽时间步长设置为2.3×10-6,仿真时长为1.5 s,为更准确查看各时刻尿素颗粒运动状态,将保存间隔均设置为0.01 s,单元格大小设置为3倍半径,最后将EDEM设置为待耦合状态,在RecurDyn中开始计算。
2.4 离散元仿真结果分析
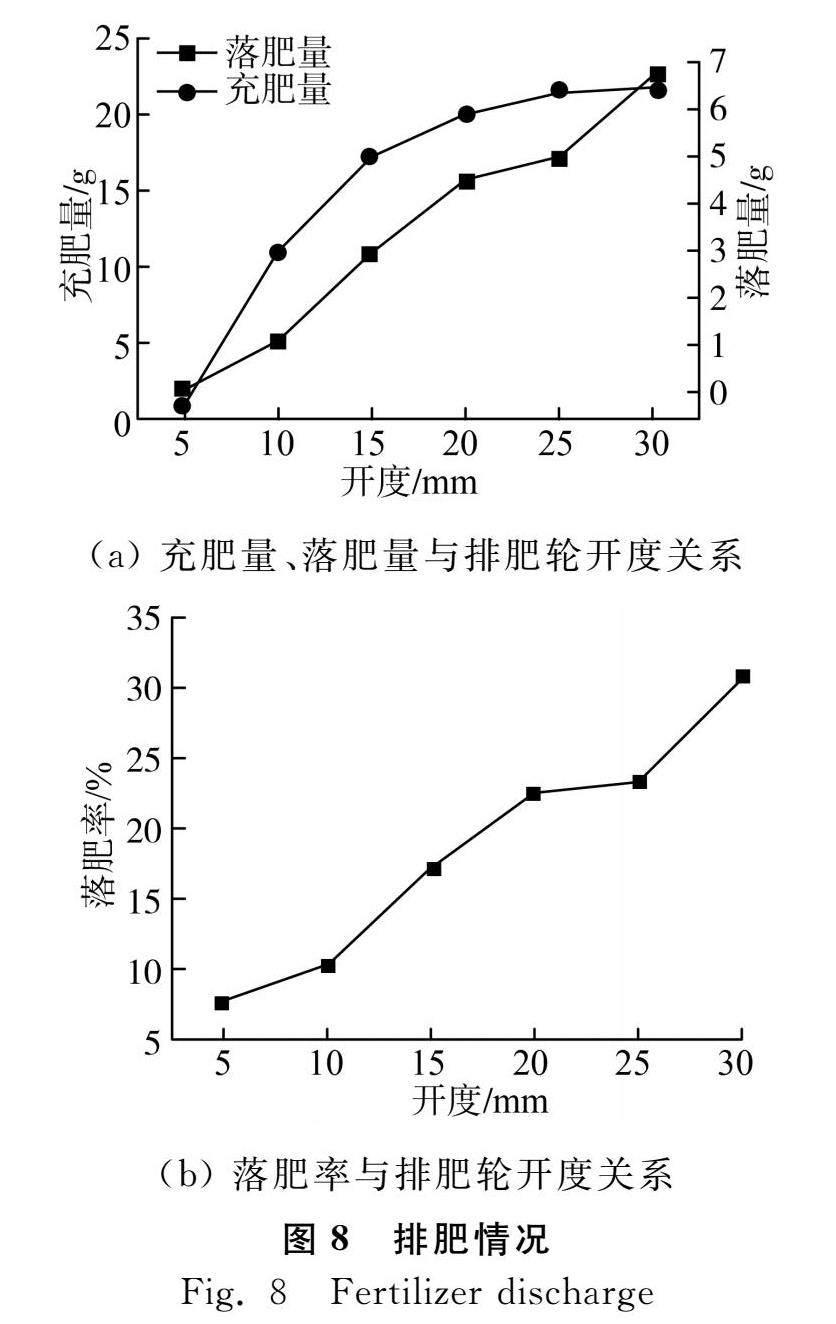
如图7所示,分别在排肥轮位置和鸭嘴下方建立Grid Bin Group,统计充肥量(软管中单次落入排肥轮的肥料质量)和单次落肥质量并计算落肥率(单次扎穴落肥量与充肥量的比值),分别将各组统计质量数据导入origin生成折线图如图8所示[13]。可以看出,落肥量、充肥量和落肥率均与开度成正相关,其中落肥量、落肥率与开度线性相关性最强,而在开度≤15 mm时充肥量增量较大,开度>15 mm时充肥量增量变缓,这是因为开度较小时肥料颗粒间较拥挤,受到颗粒间摩擦阻力作用容易发生堵塞,实际工况中,随着作业车行驶过程中产生振动,该情况会改观。
将落肥量数据导入SPSS对其进行单因子回归分析,得出排肥轮开度这个因素的模型摘要、ANOVA如表4、表5所示[14],可以看出,排肥轮开度对落肥量影响的显著性极大,求解得到落肥量w与开度大小l函数关系式为w=0.264l-1.218,可根据该方程得出肥量调节器各刻度值对应的施肥质量,在不同农作物田间工作时,可根据作物所需施肥量将调节器调至对应刻度值。
3 EDEMANSYS单向耦合仿真
ANSYS是一款多用途的有限元仿真分析软件,主要包括前处理、分析计算和后处理三个模块[15],可以完成结构分析、电磁场分析、压电分析以及多物理场等的耦合分析,借助EDEM_Addin插件可实现与EDEM的单向耦合[16],进而对EDEM离散元仿真过程中设备结构受力等情况进行具体分析。
3.1 EDEM土壤颗粒床创建
土壤颗粒选用带有一定黏性的土质,各参数指标参考EDEM软件内置“2_NonCompressibleStickyMaterial”示例,具体参数见表6,接触模型选择JKR模型,Surface Energe为3.57 J/m2[17]。
根据仿真预试验确定土壤床位置及尺寸,建立box用来盛放土壤颗粒,颗粒工厂选择静态完全填充,因EDEM软件静态填充时,颗粒间存在微小缝隙,多次试验发现颗粒自然沉降后高度为box高度的2/3左右,确定最终box质心位置为(-100, -490, 830),尺寸(长×宽×高)为200 mm×200 mm×200 mm,待颗粒填充沉降达到稳定状态时导出土壤颗粒床,如图9所示。
3.2 EDEM参数设置
将导出的土壤床作为颗粒工厂,同时将RecurDyn输出的walls模型导入到EDEMGeometry,如图10所示,计算域采用自动生成,重力方向为Y轴负方向,瑞丽时间步长为9×10-7,仿真时长设置为1.2 s,保存间隔和单元格大小采用上述相同设置,最后将EDEM设置为待耦合状态,在RecurDyn中开始计算。
3.3 ANSYS参数设置
EDEM仿真计算结束后,将鸭嘴受力数据以“.axdt”格式导出,在ANSYS软件中建立EDEM和Static Structural两个模块,在ANSYSDEM solutionsresult窗口讀取“.axdt”文件,将扎穴施肥单体模型导入ANSYS并把EDEMresults与Static StructuralSetup共享[18],为了方便查看鸭嘴在扎穴过程中受力情况,在ANSYSDM中将其他零部件作抑制处理并导入EDEM传输的载荷,对鸭嘴旋转轴位置添加约束并自动划分网格,如图11所示。
3.4 耦合仿真结果分析
在RecurDyn后处理导出扎穴施肥单体运动竖排运动情况曲线,如图12所示,为了方便查看土壤成穴状态,将鸭嘴以外其他walls和box作隐藏处理,在EDEM后处理建立一个垂直于XY的平面并启用,结合运动曲线查看各时刻扎穴状态[19]。
0.50~0.70 s为向下运动,此时鸭嘴进行扎穴,由图13(a)~图13(c)可以看出,鸭嘴前下方土壤被挤压;0.70~0.95 s,由图13(c)~图13(d)可以看出运动竖排到达最低位置,此时鸭嘴深入土壤;0.95~1.20 s,由图13(e)~图13(g)可以看出运动竖排向上提升,此时鸭嘴张开,肥料落入土壤,土壤成穴形状如图13(h)所示。
在ANSYS仿真结果中分别添加total deformation和equivalent stress进行求解,鸭嘴等效应力云图和位移总变形云图如图14、图15所示,总变形最大位置在鸭嘴末端位置,为0.005 mm,等效应力最大位置在鸭嘴旋转轴位置附近,为4.142 2 MPa,远小于结构钢屈服强度(235 MPa),满足使用要求。
4 扎穴排肥试验
4.1 材料与方法
参照JB/T 7864—2013《中耕追肥机》技术标准和试验方法[20],于2022年10月在华北水利水电大学机械学院实验室进行室内扎穴排肥试验。试验器材包括:挂载扎穴施肥单体的作业车、种植在花盆中的玉米植株模型、米尺、塑料碗、电子秤等。试验前,将栽有玉米植株模型的花盆按照行距600 mm、株距250 mm摆放,为了方便测量单次施肥质量,将塑料碗摆放在花盆旁边施肥单体扎穴位置,用来接收施肥单体落下的肥料。
4.2 试验结果分析
打開行驶开关,使作业车缓慢行驶,当探针传感器触碰到植株模型时进行扎穴施肥,称量每个塑料碗中落肥质量,取每排左右2个落肥质量平均值作为单次落肥量,收集落肥数据并记录于表7。
将试验所得数据平均值和仿真试验数据导入Origin得出施肥质量与排肥轮开度之间的直方图如图16所示,将数据导入SPSS对排肥轮开度与施肥量见函数关系式修正为w=0.740l-1.057。由试验数据可以看出,该施肥单体可以实现田间扎穴施肥工作,其中在开度为5 mm和10 mm时,试验组落肥量较仿真组落肥量相差5倍以上,这是因为仿真条件较为理想,开度较小时,尿素颗粒之间存在的静摩擦力作用导致部分颗粒堆积在接肥口位置无法落下,而实际工况中,随着作业车行驶过程中产生振动,堆积情况大大减弱,其他开度情况下,试验组落肥量较仿真组落肥量相差1.5~3倍之间,误差在允许范围之内。
5 结论
本文分别基于RecurDynEDEM和EDEMANSYS就高地隙中耕管理作业车扎穴施肥单体进行仿真分析,明确了扎穴施肥单体的落肥扎穴机理。
1) 通过Origin和SPSS对仿真结果绘图并进行单因素回归分析,得出了充肥量、施肥量与肥量调节器的正相关关系,并求出其落肥量与肥量调节器刻度之间的具体函数关系为w=0.264l-1.218,可以根据不同农作物所需施肥量调节至对应刻度。
2) 通过RecurDynEDEM耦合仿真分析明确了扎穴过程运动机理及土壤成穴过程,通过EDEMANSYS单向耦合仿真对鸭嘴部件扎入土壤过程进行应力分析,总变形为0.005 mm,等效应力最大为4.142 2 MPa,远小于结构钢屈服强度,满足使用要求。
3) 通过扎穴排肥试验,作业车可以实现在作物植株附近进行扎穴施肥,并将落肥量与肥量调节器刻度之间的函数修正为w=0.740l-1.057。
参 考 文 献
[1]高志强, 刘纪远, 庄大方. 基于遥感和GIS的中国土地利用/土地覆盖的现状研究[J]. 遥感学报, 1999(2): 51-55, 83.
Gao Zhiqiang, Liu Jiyuan, Zhuang Dafang. The research of Chinese landuse/landcover present situations [J]. National Remote Sensing Bulletin, 1999(2): 51-55, 83.
[2]中华人民共和国水法[J]. 防汛与抗旱, 2002(3): 1-8.
[3]袁玲合, 古冬冬, 王万章, 等. 三轮高架作业车玉米变量施肥系统设计与试验[J]. 农业机械学报, 2016, 47(S1): 170-175.
Yuan Linghe, Gu Dongdong, Wang Wanzhang, et al. Design and experiment of variable rate fertilization system of triwheel high frame operation vehicle [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S1): 170-175.
[4]胡红, 李洪文, 王庆杰, 等. 玉米行间定点扎穴深施追肥机的设计与试验[J]. 农业工程学报, 2016, 32(24): 26-35.
Hu Hong, Li Hongwen, Wang Qingjie, et al. Design and experiment of targeted holepricking and deepapplicationfertilizer applicator between corn rows [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(24): 26-35.
[5]吴南, 林静, 李宝筏. 免耕播种机精量穴施肥系统设计与试验[J]. 农业机械学报, 2018, 49(7): 64-72.
Wu Nan, Lin Jing, Li Baofa. Design and test on notillage planter precise hole fertilization system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(7): 64-72.
[6]纪龙龙, 谢焕雄, 杨红光, 等. 基于EDEMRecurdyn耦合的马铃薯干式清土装置仿真分析[J]. 中国农机化学报, 2021, 42(1): 109-115.
Ji Longlong, Xie Huanxiong, Yang Hongguang, et al. Simulation analysis of potato dry soil cleaning device based on EDEMRecurdyn coupling [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(1): 109-115.
[7]陶芸, 谢方平, 肖名涛. 偏心弹射式排肥器设计与仿真试验[J]. 中国农机化学报, 2020, 41(11): 26-32.
Tao Yun, Xie Fangping, Xiao Mingtao. Design and simulation test of an eccentric ejection fertilizer apparatus [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 26-32.
[8]王金峰, 张鑫, 唐汉, 等. 水稻秸秆反旋深埋滑切还田刀优化设计与试验[J]. 农业机械学报, 2021, 52(11): 28-39.
Wang Jinfeng, Zhang Xin, Tang Han, et al. Optimal design and experiment of deepburied reverse rotating sliding cutting straw returning blade [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(11): 28-39.
[9]赖庆辉, 贾广鑫, 苏微, 等. 基于DEMMBD耦合的链勺式人参精密排种器研究[J]. 农业机械学报, 2022, 53(3): 91-104.
Lai Qinghui, Jia Guangxin, Su Wei, et al. Design and test of chainspoon type precision seedmetering device for ginseng based on DEMMBD coupling [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(3): 91-104.
[10]周宝元, 王新兵, 王志敏, 等. 不同耕作方式下缓释肥对夏玉米产量及氮素利用效率的影响[J]. 植物营养与肥料学报, 2016, 22(3): 821-829.
Zhou Baoyuan, Wang Xinbing, Wang Zhimin, et al. Effect of slowrelease fertilizer and tillage practice on grain yield and nitrogen efficiency of summer maize [J]. Journal of Plant Nutrition and Fertilizers, 2016, 22(3): 821-829.
[11]张锐, 韩佃雷, 吉巧丽, 等. 离散元模拟中沙土参数标定方法研究[J]. 农业机械学报, 2017, 48(3): 49-56.
Zhang Rui, Han Tonglei, Ji Qiaoli, et al. Calibration methods of sandy soil parameters in simulation of discrete element method [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 49-56.
[12]史嵩, 張东兴, 杨丽, 等. 基于EDEM软件的气压组合孔式排种器充种性能模拟与验证[J]. 农业工程学报, 2015, 31(3): 62-69.
Shi Song, Zhang Dongxing, Yang Li, et al. Simulation and verification of seedfilling performance of pneumaticcombined holes maize precision seedmetering device based on EDEM [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(3): 62-69.
[13]刘正道, 王庆杰, 刘春鸽, 等. 腔盘式精量穴施肥装置设计与试验[J]. 农业机械学报, 2018, 49(10): 137-144, 355.
Liu Zhengdao, Wang Qingjie, Liu Chunge, et al. Design and experiment of precision holefertilizing apparatus with notched plate [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 137-144, 355.
[14]刘瑞江, 张业旺, 闻崇炜, 等. 正交试验设计和分析方法研究[J]. 实验技术与管理, 2010, 27(9): 52-55.
Liu Ruijiang, Zhang Yewang, Wen Chongwei, et al. Study on the design and analysis methods of orthogonal experiment [J]. Experimental Technology and Management, 2010, 27(9): 52-55.
[15]江涛, 吴崇友, 汤庆, 等. 基于ANSYS和EDEM的小麦茎秆切割仿真研究[J]. 江苏农业科学, 2018, 46(17): 231-234.
Jiang Tao, Wu Chongyou, Tang Qing, et al. Simulation of wheat straw cutting based on ANSYS and EDEM [J]. Jiangsu Agricultural Sciences, 2018, 46(17): 231-234.
[16]Amiri L, GhoreishiMadiseh S A, Hassani F P, et al. Friction factor correlation for airflow through broken rocks and its applications in mine ventilation [J]. International Journal of Mining Science and Technology, 2020, 30(4): 455-462.
[17]Kovacs, Adam, Péter Tamás Zwierczyk. Coupled DEMFEM simulation on maize harvesting [C]. ECMS, 2018.
[18]孙珊珊, 董为民, 汪滋润, 等. 基于EDEM和ANSYS耦合方法的半自磨机波形衬板的设计研究[J]. 矿冶, 2018, 27(1): 61-65.
Sun Shanshan, Dong Weimin, Wang Zirun, et al.The design of wave liner for sag mill based on EDEM and ANSYS coupling method [J]. Mining and Metallurgy, 2018, 27(1): 61-65.
[19]姚文燕, 赵殿报, 徐广飞, 等. 条带对行主动式玉米免耕播种防堵装置设计与试验[J]. 农业机械学报, 2020, 51(S2): 55-62, 71.
Yao Wenyan, Zhao Dianbao, Xu Guangfei, et al. Design and experiment of antiblocking device for strip to row active corn notillage seeding [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S2): 55-62, 71.
[20]JB/T 7864—2013, 中耕追肥机[S].