
机械割胶装备切割仿形机构设计与试验
2024-05-22 11:27:10王玲玲黄敞陈娃容张以山郑勇黎土煜
中国农机化学报 2024年2期
关键词:橡胶树
王玲玲 黄敞 陈娃容 张以山 郑勇 黎土煜


摘要:割膠是收获胶乳的重要途径,传统人力割胶技术专业性强且难度大,劳动强度高,近十年,机械采胶装备研发已成为破解产业掣肘的重要方向。为进一步提高割胶机械的割胶质量和工作平稳性,减少机械割胶伤树,按照传统人工割胶方式建立橡胶树割面的割胶轨迹方程,设计一种由导向器、割胶刀体、斜度装配体等部件组成的能够限深限厚的切割仿形机构。分析导向器、割胶刀体、斜度装配体等关键部件在割胶过程中的理论受力,并以手持式自动割胶机为试验本体,对设计的仿形切割机构开展大田割胶试验。结果表明:使用切割仿形机构割胶,更加贴合割面和割线,能够沿割胶轨迹切割出条状树皮,能够进行限深限厚仿形切割,减少伤树,切割平均负载电流稳定在1.0~1.5 A,与传统割胶模式相比,耗皮量比设置的上限值平均降低约10%,割胶深度约增加8%,验证切割仿形机构的设计,满足割胶技术要求。为天然橡胶产业机械化、智能化割胶装备关键切割部件的研发提供参考。
关键词:橡胶树;割胶装备;切割仿形机构;割胶轨迹;限深限厚
中图分类号:S776.2
文献标识码:A
文章编号:20955553 (2024) 02006209
收稿日期:2022年6月29日 修回日期:2022年8月15日
基金项目:海南省自然科学基金(522RC788);国家重点研发计划(2020YFD1000600)
第一作者:王玲玲,女,1986年生,安徽界首人,硕士,副研究员;研究方向为农业机械与信息技术。Email: zishi-010@163.com
通讯作者:张以山,男,1966年生,云南景谷人,研究员;研究方向为热作栽培与机械化。Email: catasz@126.com
Design and experiment of cutting feeler mechanism for rubber tapping machine
Wang Lingling1, 2, Huang Chang1, 2, Chen Warong1, 2, Zhang Yishan1, 2, Zheng Yong1, 2, Li Tuyu1, 2
(1. Rubber Research Institute, Chinese Academy of Tropical Agricultural Sciences, Haikou, 571101, China;
2. Mechanical Subcenter of National Important Tropical Crops Engineering Technology Research Center,
Haikou, 571101, China)
Abstract:
As latex harvested from rubber trees, rubber tapping is an important way to harvest latex. Traditional tapping technology is professional, difficult and high labor intensity. The research and development of mechanical rubber tapping equipment has become an important direction to crack the constraints of the industry in past ten years. In order to improve rubber tapping machinery quality and stability, and reduce rubber tree injury, the rubber tapping trajectory equation was established according to the traditional manual tapping method, and a mechanism composed of guider, slope assemblage and cutting knife was designed in the research, which could limit the cutting depth and thickness. The theoretical forces of the key components were also analyzed. Using a handheld automatic rubber tapping machine as the test body, the cutting feeler mechanism designed was tested in rubber tapping. The results showed that the cutting feeler mechanism could fit the tapping surface and trajectory better, cut out the stripshaped bark, limit cutting depth and thickness and reduce rubber tree damage. The average cutting current was stable between 1.0 A and 1.5 A. Compared to traditional tapping method, bark consumption was on average less than 10% compared with set upper value and tapping depth was increased at 8%. The design was verified, which met the technical requirements of rubber cutting operation. The cutting feeler mechanism proposed in this study is meaningful to improve cutting quality, stability and practicality. This research provides a reference for the subsequent development of mechanized and intelligent rubber tapping mechanism.
Keywords:
Hevea brasiliensis; rubber tapping machine; cutting feeler mechanism; tapping trajectory; cutting depth and bark thickness control
0 引言
天然橡胶是橡胶树的收获物,是一种重要的工业原料[1]。割胶是亚洲植胶国胶农从事的一个重要职业[2],是采用专用的割胶工具切割掉橡胶树皮,让胶乳随着割线流出的过程[3]。我国天然橡胶产业是应国家经济发展战略需要而兴起的[4],近年来,随着国际天胶市场持续低迷,我国植胶效益下滑,胶工收入难以维持生计,导致大量胶工外流、技工队伍老龄化严重,产业用工荒凸显[56]。目前,割胶仍沿用传统割胶工具进行割胶,机械化、智能化割胶研发与应用仍面临着重大挑战[7],严重制约天然橡胶产业发展[8]。需要创新装备技术以武装产业[9],研发应用天然橡胶机械化、智能化割胶装备是必然趋势。在割胶领域,目前研發的割胶装备,按照操作方式主要分为便携式[1014]、固定式[8, 1416]、移动式[7, 1719]三种,可以有效降低割胶技术难度和劳动强度,但均未得到大面积应用与推广。切割仿形机构是天然橡胶机械化、智能化收获的关键机构,该仿形机构的设计至关重要,直接影响割胶装备的割胶性能。
国内外对农林作物生产管理作业机械的仿形设计研究较多,包括适用于大豆垄上双行种植模式的仿形滑刀式开沟器[20]、齿带式油菜捡拾器仿形减振装置[21]、自适应仿形甘薯削皮机[22]、油麦兼用型精量宽幅免耕播种机仿形凿式开沟器[23]、联合收获机割台仿形机构[24]、甘蔗收割机刀盘仿形系统[25]、果园仿形风送喷雾机构验[26]等。张喜瑞等[8]设计了仿形进阶式固定式天然橡胶割胶机,观测了割胶前5 min的排胶量和平均耗电量。上述文献主要侧重于对农林作物耕播、收割、喷雾等生产管理作业中的仿形设计,对割胶机械限深限厚切割仿形机构设计和研究较少。
为进一步提高割胶机械的割胶质量和工作平稳性,减少割胶伤树,结合我国橡胶树割胶技术规程和推式割胶刀农业标准[2729],为便于开展试验验证,以手持式自动割胶机[13]为本体,设计一种能够限深限厚的切割仿形机构,对橡胶树的人工传统割线进行仿形切割,并进行田间试验,以期为机械化、智能化割胶装备关键切割部件的研发提供参考。
1 整体结构与工作原理
1.1 割胶农艺要求
割胶是橡胶树获取胶乳的重要途径,是通过使用特制割胶工具切割橡胶树树皮里的乳管,收集排出的胶乳。世界大面积植胶超过100年[28],仍沿用传统割胶工艺,使用小圆口推刀或拉刀割胶,采用阳刀或阴刀割胶,阳刀割线时,割出的割线倾斜度为自左上方向右下方倾斜25°~30°,阴刀割线时,自左上方向右下方倾斜40°~45°[27, 29]。
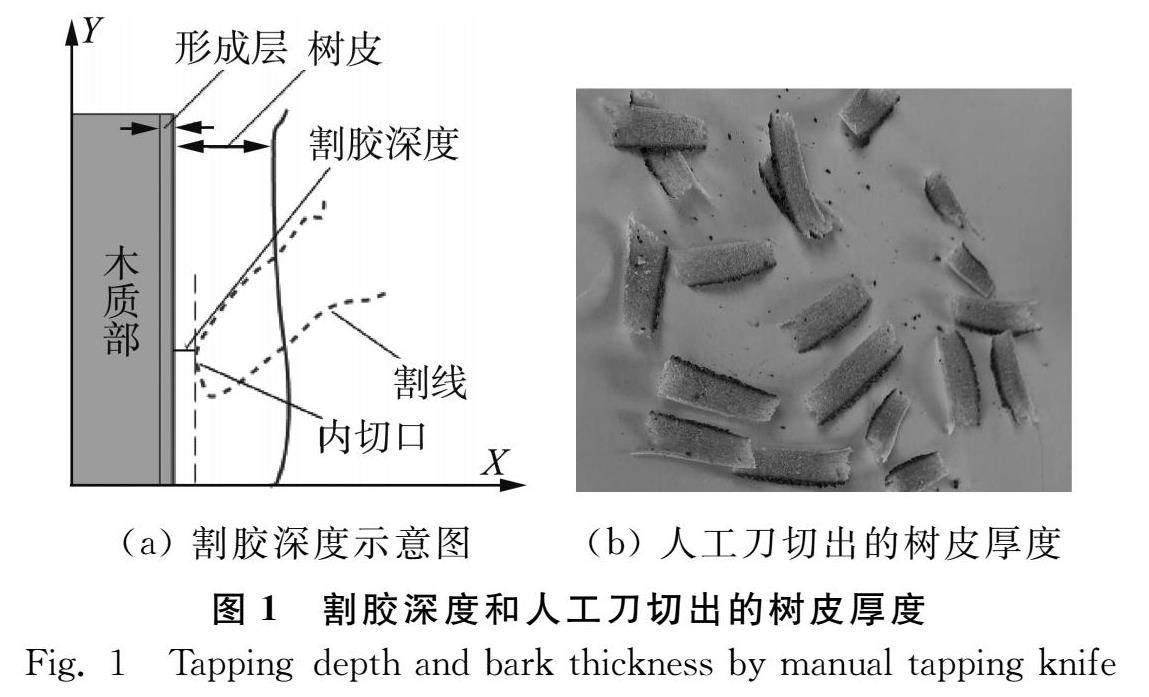
采胶的部位是橡胶树树干树皮,树皮从内到外分别是水囊皮、黄皮、砂皮内层、砂皮外层、粗皮。黄皮中含有大量功能很强的成熟乳管,是树皮中主要的产胶部分。水囊皮包括有功能次生韧皮部和形成层,厚度通常不超过1 mm,“水囊皮”的损伤将影响到橡胶树的高产稳产,要求割胶操作中控制好割胶深度,避免损伤到“水囊皮”[30]。割胶深度是割胶时割去树皮的内切口与形成层的距离,常规割胶中规定的割胶深度是保留形成层外1~1.5 mm的树皮不割,郝秉中等[30]测量的橡胶树有传导功能韧皮部的厚度为0.2~1 mm,平均约占树皮总厚度的10.04%,常规割胶的割胶深度1.2~1.8 mm,按照常规割胶深度,原则上对橡胶树不会造成伤害。常规割胶中,要求切出的树皮呈片状,单次割胶的切片数低于40片,其中低于30片为最优[28]。要求切割仿形机构能够限深且能沿着割线方向进行切割,切割出的树皮为片状。割胶深度和切出的树皮厚度如图1所示。
1.2 整体结构
切割仿形机构主要由导向器、斜配体、割胶刀体、调节旋钮、刻度区组成,其中导向器由前后调整块、上下调整块两部分组成。切割仿形机构是实现天然橡胶收获作业中有效切割橡胶树皮的关键部件,安装在手持式自动割胶机本体的头部,可拆装,易更换,是手持式自动割胶机的关键零配件,也是固定式、移动式全自动割胶机械研发设计的关键仿形切割部件。切割仿形机构整体结构如图2所示。
将切割仿形机构安装在手持式自动割胶机本体上,通过调整导向器的前后调整块,可调整手持式自动割胶机走刀方向的前后位置,实现对割胶深度的有效控制。通过调整导向器的上下调整块,可调整手持式自动割胶机垂直走刀方向的上下位置,实现对切出的树皮厚度的有效控制。通过导向器的限位控制,能够有效约束割胶作业中的切割轨迹。在人工控制下走刀切割树皮时,导向器斜面顶点紧贴于橡胶树已割面上,对已有的割线进行准确仿形,切出的新割线轨迹与旧割线一致,割胶动作参照推式割胶刀,按照“一推、二靠、三拉、四走”的动作要领完成割胶作业[13]。切割仿形机构工作示意图如图3所示。
2 关键部件设计与受力分析
2.1 沿割线运动轨迹
橡胶树树形外轮廓差异性较大,为不规则近圆形结构,因树皮厚度不均匀,割出的割线是倾斜度为自左上方向右下方倾斜25°~30°的不规则曲线。沿割线正视面运动曲线如图4所示。
图4中的圆形代表切割仿形机构,切割仿形机构在运动过程中,与割线的接触方式为点接触,运动方向始终与割线接触点保持相切。
将割线正视面曲线简化为二次函数进行计算,其曲线函数方程为
y=a1x2+b1x
(1)
k=y′=2a1x+b1=tanα
(2)
式中:
y——切割仿形机构的刀刃曲线纵坐标;
x——切割仿形机构的刀刃曲线横坐标;
y′——纵坐标的一阶导数;
a1、b1——常数;
k——曲线斜率;
α——刀刃接触割线出的滑切角。
以割线长度为0.40 m的橡胶树标准木为例,当x=0 cm时,α取最小值25°,当x=0.40 m时,α取最小值30°,代入式(2),可得a1=0.14,b1=0.47。
将a1、b1代入式(1),可得割胶仿形机构沿割线正视面运动的曲线方程为
y=0.14x2+0.47x
(3)
沿割线侧视面运动曲线如图5所示。图5中的圆形代表切割仿形机构。
(a) 割线侧视图
(b) 沿割线侧视面运动曲线
将其简化为抛物线,则割线曲线方程为
y=f(z)
(4)
简化为抛物线方程
y2=2p1z(p>0)
(5)
准线K为
z=-p12
(6)
式中:
p1——
焦点K2至准线K的距离;
K2——
焦点,坐标为p12,0。
该割线的极点在抛物线定点O点,将z=ρcosβ,y=ρsinβ代入抛物线方程,可得极坐标方程为
ρ=2p1cosβ1-cos2β
(7)
机构沿割线侧视面运动曲线的参数方程为
z=2p1t2
y=2p1t
(8)
式中:
t——点B0在曲线上对应的参数。
2.2 切割仿形设计与受力分析
2.2.1 切割仿形设计
使用传统推式割胶刀进行割胶作业,主要通过胶工掌握割胶技术的熟练程度来实现对割胶深度和耗皮量的控制,割胶技术难度大,劳动强度高。张喜瑞等人设计的仿形限深滚轮[8],是基于常见的导向轮形式,将导向轮与橡胶树之间的线接触改进为点接触,以实现割胶限深的目的。由于不同橡胶品系、树龄、季候、割制条件下,橡胶树生长存在差异性,割胶深度、耗皮厚度的农艺要求也有差异[31]。采用常见的轮式和杆式导向限深机构,不能连续调节割胶深度、耗皮量,难以满足生产上的差异化需求,不具有广适性。
采用导向器侧面与橡胶树已割面树干之间线接触、导向器末端与橡胶树树干割线内侧之间点接触的方式,改进设计仿形限深限厚导向器,如图6(a)所示。导向器固定在斜面体上,可前后、上下调节。割胶时,导向器侧面与橡胶树已割面树干相对固定滑动,导向器末端与靠近橡胶树树干割线相对固定滑动,对橡胶树割线轨迹进行仿形。通过导向器上下调节块,调整导向器与橡胶树已割面树干接触位置,调整走刀方向,达到对割胶深度的控制,如图6(b)所示。通过导向器前后调节块,调整导向器与割胶刀体之间的距离,达到对割胶耗皮量的控制,如图6(c)、图6(d)所示。
导向器、斜配体均采用锌合金材料,铸件温度相對低,易加工。刀片采用合金钢材料,硬度较好,硬度达到50HRC以上。导向器连接于斜度装配体上的连接处,并向橡胶树已割面树干外周面的切线方向延伸,与割胶刀体的端刃部平行适配,导向器左右对称安装于斜度装配体的两侧,与割胶刀体配合使用。
2.2.2 导向器结构参数与受力分析
导向器与橡胶树之间滑动产生的滑动摩擦力,有侧面线接触的滑动摩擦力fs和末端点接触的滑动摩擦力ft,反作用于导向器的力有垂直于树干的力fn和与垂直于割线的力Fn,受力主要集中在导向器侧面和末端。导向器受力与横截面积示意图如图7所示。
(a) 导向器受力分析
(b) 导向器与割线接触横截面积
为便于计算,将导向器稳定性计算简化为压杆,属于比例限制内的稳定问题。导向器稳定条件为
n1=Fer1F1≥nst1
(9)
式中:
n1——导向器稳定条件的安全系数;
F1——导向器的工作应力;
Fer1——导向器的临界力;
nst1——
需用稳定性安全系数,导向器为锌合金材料,稳定性安全系数为1.8~3.0。
按照欧拉公式计算,导向器的工作应力
F1=η1E0I1l12
(10)
式中:
E0——弹性模量,N/cm2;
η1——导向器的稳定系数;
l1——导向器全长,cm;
I1——导向器截面的惯性矩,cm4。
导向器的临界应力
σc1=π2E0π2E0λ12
(11)
压杆的柔度
λ1=μ1l1i1
(12)
式中:
μ1——导向器的长度系数;
i1——导向器截面的惯性半径,cm。
导向器一端固定在斜度装配体,另一端沿着割线进行侧向移动,但不能转动,则导向器的长度系数μ1、稳定系数η1分别为1、9.87。
导向器呈L形,将导向器横截面简化为L形,导向器的横截毛面积
A=BH-b×(ey2+h)
(13)
式中:
A——导向器的横截毛面积;
B——导向器与割线接触横截面积的总长度;
b——
导向器横截面尾端到纵截面的距离;
H——
导向器与割线接触横截面积的总高度;
h——
导向器与树皮接触的顶部到横截面的距离;
ey2——导向器与树皮接触的高度。
导向器截面的惯性矩
I1=13(Bey13+aey23-bh3)
(14)
式中:
ey1——导向器与树皮未接触的高度。
导向器截面的惯性半径
i1=I1A
(15)
导向器截面的最小惯性半径
i1min=I1minA
(16)
化简得到导向器受到橡胶树割面和割线的工作应力
F1=9.87E0(Bey13+aey23-bh3)3l12
(17)
导向器惯性半径取最小值i1min时,临界应力σc1最大,此时导向器的临界应力
σc1=π2E0(Bey13+aey23-bh3)3l12[BH-b×(ey2+h)]
(18)
此时l1=2.82 cm,a=1.25 cm,b=1.57cm,h=0,B=H=2.82 cm,ey1=1.04 cm,ey2=1.78 cm,π=3.14,锌合金(参照硬铝合金)弹性模量为70 GPa,此时取E0=70 GPa,计算得出导向器的临界应力为3.20×1010 N/m2。
2.2.3 割胶刀体结构参数与受力分析
割胶刀体在割胶作业过程中,割胶刀体与橡胶树割线上的树皮为线接触,割胶刀体切割割线示意图如图8所示。
割胶刀体在切割树皮时接触部分产生局部弹性变形,形成接触面很小的面接触,在割胶刀体的接触处产生很大的局部应力,离开割胶刀体的接触面稍远处应力急剧下降。接触强度条件为
σmax≤σHP
(19)
式中:
σHP——许用接触应力。
割胶刀体与橡胶树割线上的树皮为线接触,在平均主应力P的作用下,割胶刀体与橡胶树割面的割线的树皮相互压紧,在接触区附近产生应力和变形,接触区简化为椭圆,接触椭圆方程为
A1x2+B1y2=C
(20)
A1=B1=R2-R12R1R2
(21)
接触面尺寸
a2
=b2
=0.909×3PR1R2R1+R21-v12E1+1-v22E2
(22)
当割胶刀体与割线的面接触E1=E2=E,μ1=μ2=0.03时,最大接触压应力为
σmax=0.388×3PE2R2-R1R1R22
(23)
式中:
E1——
割胶刀体的弹性模量,N/cm2;
E2——
橡胶树皮的弹性模量,N/cm2;
P——平均主应力;
v1——割胶刀体的泊松比;
v2——橡胶树皮的泊松比;
a2——接触橢圆的长半轴;
b2——接触椭圆的短半轴;
R1——
割胶刀体接触点处的主曲率半径;
R2——
橡胶树皮接触点处的主曲率半径。
应力最大时,应满足条件
R2-R1R1R2≈1
(24)
合金钢弹性模量为206 GPa,普通碳钢的许用应力为113 MPa,此时取E=206 GPa,P=113 MPa,计算得出割胶刀体的最大接触压应力为1.69×1010 N/m2。
2.2.4 斜度装配体结构参数与受力分析
斜度装配体与导向器之间为面接触,接触示意图如图9所示。
为便于计算,将斜度装配体稳定性计算简化为压杆。斜度装配体稳定条件为
n2=Fer2F2≥nst2
(25)
式中:
F2——斜度装配体的工作应力;
Fer2——斜度装配体的临界力;
nst2——
需用稳定性安全系数,斜度装配体为锌合金材料,稳定性安全系数为1.8~3.0。
按照欧拉公式计算,斜度装配体的工作应力为
F2=η2E3I2l22
(26)
斜度装配体的临界应力
σc2=π2E3π2E3λ22
(27)
压杆的柔度为
λ2=μ2l2i2
(28)
式中:
E3——
斜度装配体弹性模量,N/cm2;
l2——斜度装配体全长,cm;
I2——
斜度装配体截面的惯性矩,cm4;
μ2——斜度装配体的长度系数;
η2——斜度装配体的稳定系数;
i2——
斜度装配体截面的惯性半径,cm。
斜度装配体与导向器相对固定,属于两端铰接,则斜度装配体的长度系数μ2、稳定系数η2分别为1、9.87。
将斜度装配体与导向器接触面简化为矩形,接触面的横截毛面积
A2=a3b3
(29)
斜度装配体惯性矩
I2x=a3b3312,I2y=a33b312
(30)
斜度装配体受到的应变距离
e2x=b32,e2y=a32
(31)
斜度装配体惯性半径
i2=I2A2
(32)
i2x=0.289b3,i2y=0.289a3
(33)
化簡得到斜度装配体受到的工作应力为
F2x=0.824a3b33E3l22,
F2y=0.824a33b3E3l22
(34)
斜度装配体惯性半径取最小值i2min时,临界应力σc2最大,此时斜度装配体的临界应力为
σc2x=0.084π2b32E3l22,
σc2y=0.084π2a32E3l22
(35)
此时l2=4.56 cm,a3=1.65 cm,b3=2.48 cm,π=3.14,锌合金(参照硬铝合金)弹性模量为70 GPa,此时取E3=70 GPa,计算得出的斜度装配体的临界应力σc2x=2.16×1010 N/m2,σc2y=9.58×109 N/m2。
3 田间试验结果
为验证设计的机械割胶装备切割仿形机构在割胶作业中的切割性能,于2021年9月在海南儋州中国热带农业科学院试验场三队天然橡胶种植基地,选择树围均在600 mm以上、1/2割线,平均割线长度约为400 mm的150株开割期橡胶树进行割胶作业试验,每5株树为一组,共分为30组,每组的试验结果均取5株树的平均值。切割仿形机构割胶作业过程包括下刀、行刀和收刀操作,如图10所示。
3.1 试验方案
将切割仿形机构装载到手持式自动割胶机[13]手柄前端,按照NY/T 1088—2006《橡胶树割胶技术规程》[27]要求,1/2阳刀割线不大于14 mm,割胶深度1.2~1.8 mm,对切割仿形机构限深限厚尺寸进行调整,将导向器侧面与已割面线贴合,导向器末端与割线内侧点贴合,耗皮量设在14 mm以下,开展割胶切割试验。以选择的30组共150株处于开割生产期的橡胶树为试验对象,每株树均沿人工割线割1刀,重点观测割线长度、耗皮量、树皮厚度、割胶时间、负载电流等参数。每次切割时,启动电源5 s后,确保手持式自动割胶机进入稳定运转状态后,再进行切割试验[32]。试验观测的割胶时间为单株橡胶树割胶作业时间,是从下刀到收刀的过程时间。为不伤害开割生产期橡胶树的韧皮部,不直接对割胶深度进行测量,采用测量计算转发的方法,计算人工切割树皮厚度、切割仿形机构切割树皮厚度的试验结果,分析切割过程是否伤树。试验用的主要设备包括:皮尺、游标卡尺、秒表、数字万用表、接线端子、手持式自动割胶机。
3.2 结果与分析
使用切割仿形机构,沿人工割线进行割胶,新割线与人工割线基本保持一致,使用切割仿形机构割胶前后的割线如图11所示。使用切割仿形机构切割的树皮呈整条状,均为有效皮,切出的橡胶树皮如图12所示。
耗皮量测量结果如图13所示,使用切割仿形机构割胶的耗皮量均不大于设置值的上限14 mm,平均低于上限值的10%。树皮厚度测量结果如图14所示,使用切割仿形机构割出树皮的厚度略小于人工割出树皮的厚度,由于割胶深度是树皮的总厚度减去割出的树皮厚度。
因此,使用切割仿形机构的割胶深度会略大于人工的割胶深度,均在8%以内,不会造成伤树。综上,满足割胶作业技术要求。
切割空载电流、负载电流均较稳定,切割平均负载电流均在1.0~1.5 A之间,验证了切割仿形机构的设计,满足割胶作业要求。使用切割仿形机构割胶过程的切割电流测量结果如图15所示。
4 结论
1) 设计了机械割胶装备切割仿形机构关键部件,在仿形机构设计中,导向器、斜配体均采用锌合金材料,刀片采用合金钢材料;割胶作业时,以人工割线及已割面为参考,通过前后、上下调整导向器进行限深限厚仿形,通过下刀、行刀、收刀实现沿人工割线的曲线切割运动,切割出条状树皮,完成割胶作业。
2) 理论分析了切割仿形机构沿割线运动轨迹,以及导向器、刀片、斜度装配体关键零部件的受力,导向器的临界应力为3.20×1010 N/m2,割胶刀体的最大接触压应力为1.69×1010 N/m2,斜度装配体的水平方向和垂直方向的临界应力分别为2.16×1010 N/m2,9.58×109 N/m2,确定了合适的导向器外侧面及末端的设计及材料选择,以确保切割仿形机构更加贴合割面和割线,实现高效仿形,可以参照传统人工割胶技术进行割胶作业。
3) 使用切割仿形机构割胶的耗皮量均不大于设定值的上限值,平均约低于上限值的10%,均在割胶技术要求范围内;割胶深度会略大于人工割胶,均在8%以内,不会造成伤树。满足割胶作业技术要求。
4) 使用切割仿形机构割胶过程的切割平均负载电流均在1.0~1.5 A之间且稳定,验证了切割仿形机构的设计,满足切割稳定的割胶作业要求。
参 考 文 献
[1]Martiansyah I, Amanah D M, Putranto R A. Semiquantitative RTPCR analysis of transcripts encoding protease inhibitor in Hevea brasiliensis Muell [C]. International Biotechnology Conference on Estate Crops, 2017.
[2]Pramchoo W, Geater A F, Tangtrakulwanich B. Physical ergonomic risk factors of carpal tunnel syndrome among rubber tappers [J]. Archives of Environmental & Occupational Health, 2020, 75(1): 1-9.
[3]Qi D L, Zhou J N, Xie G S, et al. Optimizing tappingtree density of rubber (Hevea brasiliensis) plantations in South China [J] SmallScale Forestry, 2016, 15(1): 61-72.
[4]吴兆录. 西双版纳橡胶种植与可持续发展研究[C]. 中国吉林长春: 新世纪 新机遇 新挑战——知识创新和高新技术产业发展(下册), 2001.
[5]金华斌, 田维敏, 史敏晶. 我国天然橡胶产业发展概况及现状分析[J]. 热带农业科学, 2017, 37(5): 98-104.
Jin Huabin, Tian Weimin, Shi Minjing. Current situation and industrial development of natural rubber in China [J]. Chinese Journal of Tropical Agriculture, 2017, 37(5): 98-104.
[6]杨文凤, 校现周, 吴明, 等. 我国高效割胶新技术推广应用概况[J]. 中国热带农业, 2021(6): 5-10, 58.
Yang Wenfeng, Xiao Xianzhou, Wu Ming, et al. Promotion and application of new highefficiency latex harvest technology in China [J]. China Tropical Agriculture, 2021(6): 5-10, 58.
[7]Zhou H, Zhang S L, Zhang J X, et al. Design, development, and field evaluation of a rubber tapping robot [J]. Journal of Field Robotics, 2022, 39(1): 28-54.
[8]张喜瑞, 曹超, 张丽娜, 等. 仿形进阶式天然橡胶割胶机设计与试验[J]. 农业机械学报, 2022, 53(4): 99-108.
Zhang Xirui, Cao Chao, Zhang Li, et al. Design and test of profiling progressive natural rubber automatic tapping machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(4): 99-108.
[9]刘旭, 李文华, 赵春江, 等. 面向2050年我国现代智慧生态农业发展战略研究[J]. 中国工程科学, 2022, 24(1): 38-45.
Liu Xu, Li Wenhua, Zhao Chunjiang, et al. Highquality development of modern smart ecological agriculture [J]. Strategic Study of CAE, 2022, 24(1): 38-45.
[10]Soumya S J, Vishnu R S, Arjun R N, et al. Design and testing of a semi automatic rubber tree tapping machine [C]. IEEERegion10 Humanitarian Technology Conference (R10-HTC), 2016.
[11]Arjun R N, Soumya S J, Vishnu R S, et al. Semi automatic rubber tree tapping machine [C]. International Conference on Robotics and Automation for Humanitarian Applications (RAHA), 2016: 92-96.
[12]Zhang Y, Deng Y G, Wang Y Q, et al. The control system of the grinding machine is designed for the rubber tree pushtype gluing knife field [C]. 6th International Conference on Measurement, Instrumentation and Automation (ICMIA), 2017: 708-712.
[13]王玲玲, 鄭勇, 黄敞, 等. 4GXJ系列便携式电动割胶装备与技术应用[J]. 中国热带农业, 2021(6): 18-21, 62.
Wang Lingling, Zheng Yong, Huang Chang, et al. 4GXJ series portable electric tapping equipment and technology application [J]. China Tropical Agriculture, 2021(6): 18-21, 62.
[14]Susanto H, Ali S, HANIF. The design of flexible rubber tapping tool with settings the depth and thickness control [J]. IOP (Conference) Series. Materials Science and Engineering, 2019, 506(1): 12002.
[15]宁波中创瀚维科技有限公司. 一种割胶机[P]. 中国专利: CN202023341822.6, 2022-02-01.
[16]Abhilash K S, Babu V V S, Rahman A N, et al. Investigative study on the feasibility of simultaneous movement along multiple axes for helical cut using RTM [J]. Materials Today: Proceedings, 2021, 45(2): 3422-3425.
[17]Zhang C L, Yong L Y, Chen Y, et al. A Rubbertapping robot forest navigation and information collection system based on 2D LiDAR and a gyroscope [J]. Sensors, 2019, 19(9): 1-21.
[18]邓祥丰, 肖苏伟, 曹建华, 等. 基于软轨行走的全自动采胶机设计与实现[J]. 中国农机化学报, 2021, 42(12): 17-23.
Deng Xiangfeng, Xiao Suwei, Cao Jianhua, et al. Design and realization of automatic rubber picking machine based on soft track walking [J]. Journal of Chinese Agricutural Mechanization, 2021, 42(12): 17-23.
[19]周航, 张顺路, 翟毅豪, 等. 天然橡胶割胶机器人视觉伺服控制方法与割胶试验[J]. 智慧农业(中英文), 2020, 2(4): 56-64.
Zhou Hang, Zhang Shunlu, Zhai Yihao, et al. Vision servo control method and tapping experiment of natural rubber tapping robot [J]. Smart Agriculture, 2020, 2(4): 56-64.
[20]贾洪雷, 郑嘉鑫, 袁洪方, 等. 仿形滑刀式开沟器设计与试验[J]. 农业工程学报, 2017, 33(4): 16-24.
Jia Honglei, Zheng Jiaxin, Yuan Hongfang, et al. Design and experiment of profiling slidingknife opener [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(4): 16-24.
[21]江涛, 关卓怀, 梁苏宁, 等. 齿带式油菜捡拾器仿形减振装置设计与试验[J]. 农业机械学报, 2020, 51(11): 148-157.
Jiang Tao, Guan Zhuohuai, Liang Suning, et al. Design and experiment of profiling and damping device for rapeseed toothbelt pickup [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(11): 148-157.
[22]俞国红, 郑航, 薛向磊. 自适应仿形甘薯削皮机优化设计与试验[J]. 农业机械学报, 2021, 52(3): 135-142.
Yu Guohong, Zheng Hang, Xue Xianglei. Optimization design and experiment of autoadaptive profiling sweet potato peeler [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(3): 135-142.
[23]王磊, 廖宜濤, 张青松, 等. 油麦兼用型精量宽幅免耕播种机仿形凿式开沟器研究[J]. 农业机械学报, 2019, 50(11): 63-73.
Wang Lei, Liao Yitao, Zhang Qingsong, et al. Design on profiling chisel opener of precision broad width notillage planter for rapeseed and wheat [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(11): 63-73.
[24]金诚谦, 刘岗微, 倪有亮, 等. 基于MBDDEM耦合的联合收获机割台仿形机构设计与试验[J]. 农业工程学报, 2022, 38(2): 1-10.
Jin Chengqian, Liu Gangwei, Ni Youliang, et al. Design and experiment of header profiling mechanism for combine harvester based on MBDDEM coupling [J]. International Agricultural Engineering Journal, 2022, 38(2): 1-10.
[25]董哲, 陆静平. 基于模糊PID控制的甘蔗收割机刀盘仿形系统设计及仿真[J]. 中国农机化学报, 2021, 42(11): 12-16.
Dong Zhe, Lu Jingping. Design and simulation of knife plate simulation system of sugarcane harvester based on fuzzy PID control [J]. Journal of Chinese Agricutural Mechanization, 2021, 42(11): 12-16.
[26]房開拓, 周良富, 尤丽华. 果园仿形风送喷雾机构设计与试验[J]. 中国农机化学报, 2022, 43(3): 68-74, 83.
Fang Kaituo, Zhou Liangfu, You Lihua. Design and evaluation of orchard profiling pneumatic sprayer [J]. Journal of Chinese Agricutural Mechanization, 2022, 43(3): 68-74, 83.
[27]NY/T 1088—2006, 橡胶树割胶技术规程[S].
[28]汝绍锋, 李梓豪, 梁栋, 等. 天然橡胶树割胶技术的研究及进展[J]. 中国农机化学报, 2018, 39(2): 27-31.
Ru Shaofeng, Li Zihao, Liang Dong, et al. Progress in the research of tapping technology of natural rubber tree [J]. Journal of Chinese Agricutural Mechanization, 2018, 39(2): 27-31.
[29]NY/T 267—2006, 推式割胶刀[S].
[30]田维敏, 史敏晶, 谭海燕, 等. 橡胶树树皮结构与发育[M]. 北京: 科学出版社, 2015.
[31]范丹. 树龄和乙烯利刺激对天然橡胶性能影响的研究[D]. 海口: 海南大学, 2014.
Fan Dan. Research on theeffect of treeage and ethylene stimulation on the properties of natural rubber [D]. Haikou: Hainan University, 2014.
[32]黄敞, 郑勇, 王玲玲, 等. 便携式电动胶刀割胶技术与切割试验[J]. 江苏农业科学, 2019, 47(23): 260-263.
Huang Chang, Zheng Yong, Wang Lingling, et al. Tapping technology and cutting test of portable electric tapping knife for rubber tree [J]. Jiangsu Agricultural Sciences, 2019, 47(23): 260-263.
猜你喜欢
热带生物学报(2022年1期)2022-03-09 10:53:58
农业科技与信息(2021年9期)2021-12-07 01:53:49
农业科技与信息(2021年7期)2021-12-06 07:49:37
农业科技与信息(2021年8期)2021-12-06 04:24:43
农民致富之友(2019年29期)2019-10-21 04:54:56
天天爱科学(2018年11期)2018-11-26 01:19:16
散文选刊·下半月(2018年2期)2018-02-23 21:12:05
贵州科学(2016年5期)2016-11-29 01:25:31
世界热带农业信息(2016年6期)2016-07-02 06:33:24
世界热带农业信息(2015年10期)2015-04-29 00:44:03
